Система адаптивного управления технологическим процессом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1781670
Авторы: Аншина, Дашевский, Казанцева, Красильников

Текст
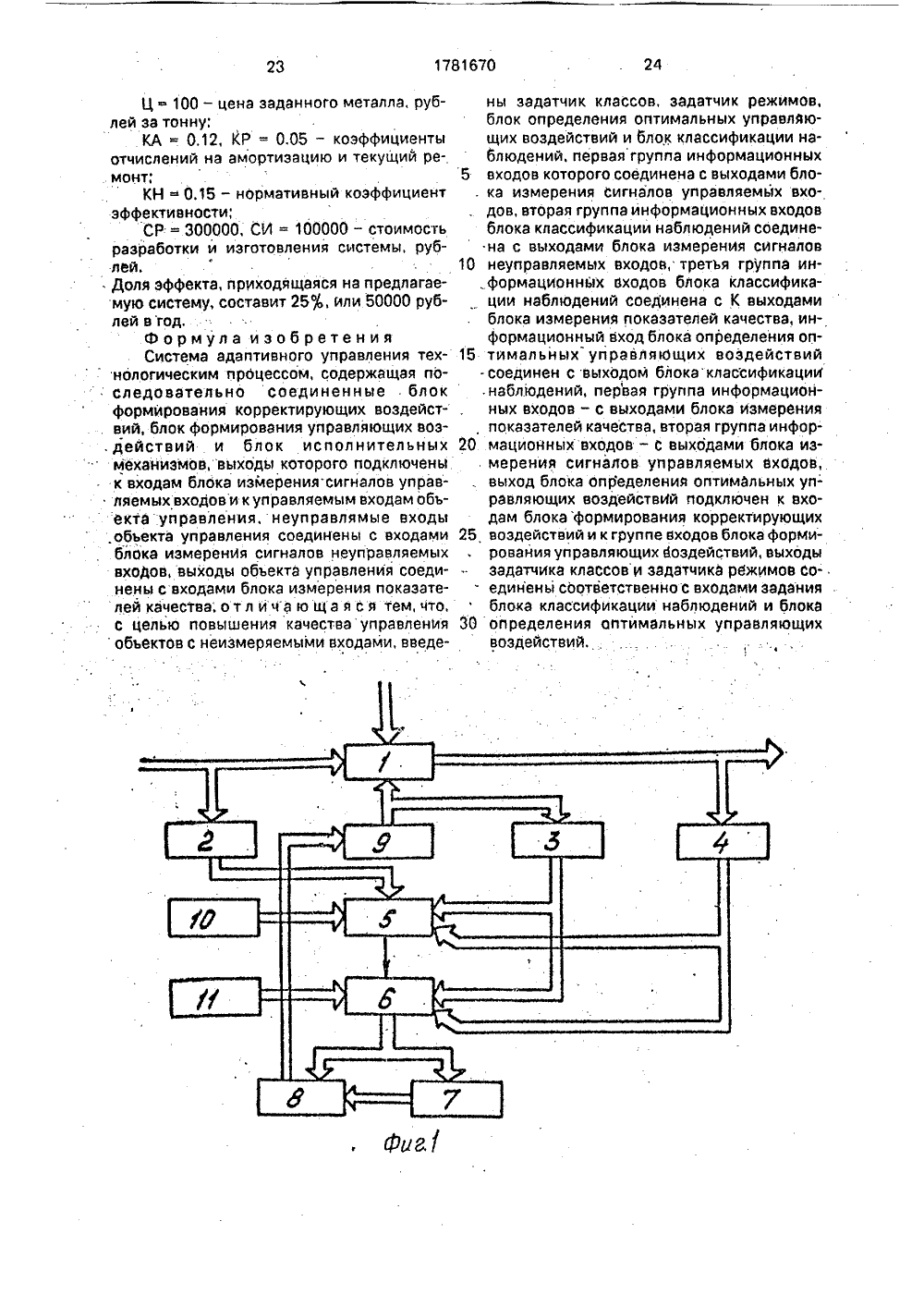
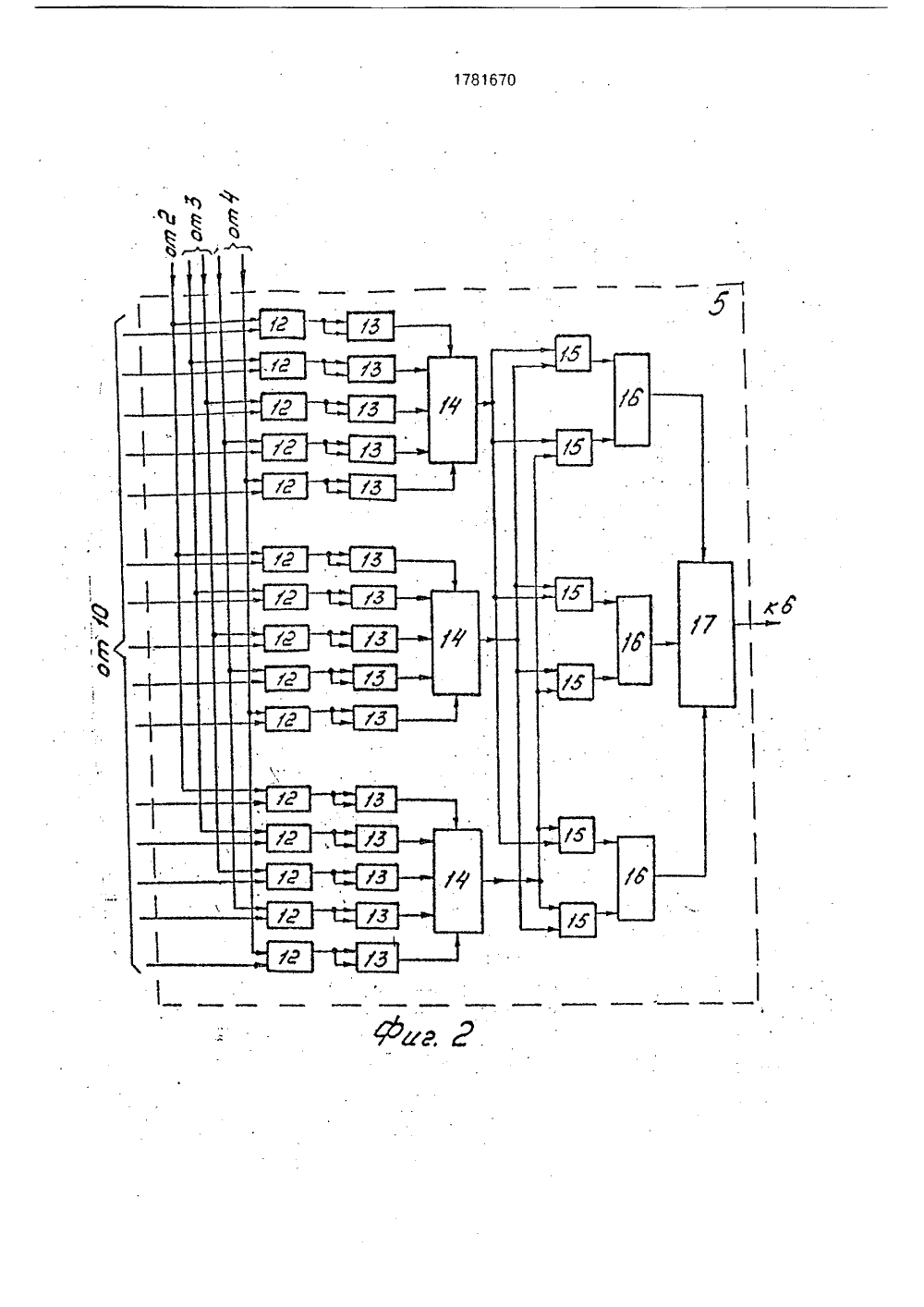
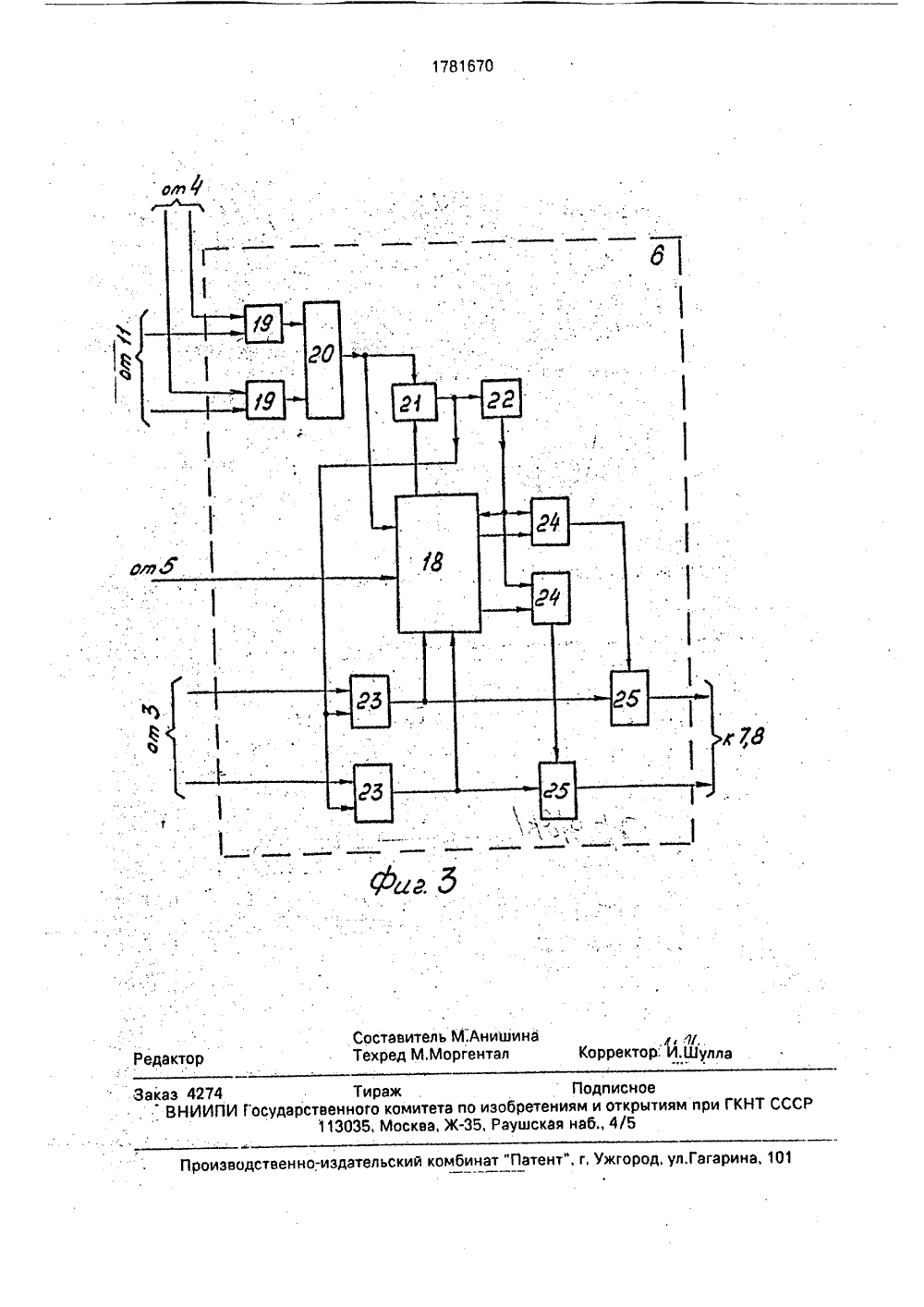
(54) СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ (57) Изобретение относится к системам управления технологическими процессами и может быть использовано для адаптивного управления технологическими процессами в условиях наличия неиэмеряемых неуправляемых входов объекта, существенно влияющих на критерий управления. Целью изобретения является повышение качества управления. Указанная цель достигается Изобретение относится к системам управления технологическими процессами и может быть использовано для адаптивного . управления технологическими процессами в условиях наличия неизмеряемых неуправляемых входов объекта, существенно влияющих на качество управления. При этом . регулирование отдельных переменных технологического процесса осуществляется локальными регулирующими устройствами.Примером таких объектов могут быть, например, мегаллургические агрегаты: прокатные станы, сталеплавильные и доменные печи, Такие объекты часто имеют неизмеряемые неуправляемые входы т,е. такие входы, сигналы которых недоступны для:2тем, что в систему, содержащую объект управления, последовательно соединенные блок формирования корректирующих воздействий, блок формирования управляющих воздействий и блок исполнительных механизмов, а также блоки измерения показателей качества и сигналов управляемых и неуправляемых входов, введены блок классификации наблюдений, входы которого соединены с блоками измерения показателей качества, сигналов управляемых и неуправляемых входов и с задатчиком классов, и блок определения оптимальных управляющих воздействий, входы которого соединены с блоком классификации наблюдений, блоками измерения показателей качества и измерения сигналов управляемых входов и сзадатчиком режимов, выход блока оп ределения оптимальнйх управляющих воздействий соединен с входам формирования корректирующих , вий и блока формирования упр воздействий. 3 ил. СО прямого управления и не поддаются непосредственному измерению, Например, для обьекта - непрерывного широкополосного стана горячей прокатки полос неуправляемым неизмеряемым входом в числе других С является температура сляба и ее объемное распределение. Эта температура определя- Ъ ется конструкцией и режимом работы нагревательных устройств, физико-химичеСкими свойствами и размерами сляба и может , быть оценена лишь грубыми косвенными методами, т.к. слябы покрыты толстым слоем окалины и разогреты неравномерно по объему, В то же время температура сляба оказывает значительное влияние на ход прокатки и ее результаты - достижение за20 1781670 19 10 20 45 измерения сигналов управляемых входов (если целевая функция текущего наблюдения "лучше", чем наилучшая из ранее достигнутых для данного класса), или считанный из запОминающего устройства 18 ранее запомненный набор сигналов управляемых входов объекта управления 1, соответствующий наилучшемуранее запомненному значению целевой функции, С выходов элементов ЗАПРЕТ 23 пер вой группы подэотся сигналы"ка 1 сна входы элементов ИЛИ 25, так и на вторые инфор- мационные входы запоминающего устройства 18. Запись информации с этих информационных входов в запоминающее устройство 18 осуществляется по сигналу нэ управляющем входе запоминающего устройства 18 при переходе этого сигнала из состояния "1" в состояние "0", Одновременно происходит запись в запоминающее устройство 18 сигнала с его первого информационного входа - новое наилучшее значение целевой функции для данного :класса.Запись новых значений целевой функции и соответствующих ей новых значений лучших для этого класса управляющих воздействий осуществляется взамен устаревшей информации по прежнему адресу - всоответствии с номером класса текущего наблюдения и кодом на информационном входе блока 6 определения оптимальных управляющих воздействий, Таким образом, в процессе функционирования системы в запоминающем устрой стве 18 блока 6 определения оптимальных управляющих воздействий происходит постоянное накопление информации об объекте управления 1 и системе в"целом,происходит постоянное улучшение качества управления, тем самым достигается цель изобретения - повышение качества управления технологическим процессом,Повышение качества управления достигается:- за счет учета влияния на процесс неизмеряемых входов объекта, например - пэраметров сырья, определяемых его технологической предисторией (режимами,технологии на предыдущих в технологической цепочке агрегатах);- за счет постоянной коррекции оптимальных управляющих воздействий, которая осуществляется в блоке определения оптимальных управляющих воздействий;- за счет заложенной в самой структуресистемы безусловнойдостижимости оптимальной точки, формируемой в блоке определения оптимальных управляющих воздействий для текущего состояния объектэ управления, и для класса, определяемого в блоке классификации наблюдений,- за счет исключения возможности выхода управляющих воздействий за пределы технологических ограничений выбором управляющих воздействий в блоке ф о р ми ро в а н и я уп ра в л я ю щ их воздействий из множества допустимых управляющих воздействий. Предлагаемая система может быть использована для адаптивного управления различными технологическими процессами и для различных объектов управления, например - в металлургии на непрерывном широкополосном стане горячей прокатки стальных полос, в нефтепереработке нэ установке каталитического крекинга и т,д.Предлагаемая система может быть реализована нэ известных в автоматике датчиках, исполнительных механизмами узлах и элементах.Блок 2 (см,фиг. 1) измерения сигналов неуправляемых входов, блок 3 измерения сигналовуправляемых входов, блок 4 измерения показателей качества реализуются на обычных датчиках технологических систем контроля и управления, преобразующих электрические и неэлектрические входные сигналы в стандартные электрические сигналы, Для объекта управления - непрерывного широкополосного стана горячей прокатки такимидатчиками являются, например; йзмерители усилий серии ИУМ, рентгеновские измерители толщины полос, измерители ширины проката конструкции ВНИИМЕТМАШ. Датчики содержат средства обработки сигналов, или могут быть дополнены такими стандартными средствами, Например, современные рентгеновские измерители толщины имеют встроенные ЭВМ с прогрэммамй для статических расЧетов.Блок 9 йсполнительных механизмов может быть реализован на стандартных исполнительных механизмах в соответствии с типом объекта управления. Например, для непрерывного широкополосного стана горячей прокатки с двумя управляемыми входами - вертикальными и горизонтальными обжатиями заготовки - .-э качестве испол-, нительных механизмов могут быть использованы обычные электромеханические или гидронажимные устройства прокатного стана, например - беспоршневое гидронажимное устройство.Блок 5 классификации наблюдений, блок 6 определения оптимальных управляющих воздействий, блок 7 формирования корректирующих воздействий, блок 8 формирования управляющих воздействий, за- Шифратор 17 может быть сконструиродатчик классов 10 и задатчик,режимов 11 ван, например, на основе таблицы, занесенмогут быть реализованы на серийной элект- ной в программируемую логическуюронно-вычислительной технике, например, матрицу или в программируемое постоян,ЭВМ Электроника- 15 ВУМС(5), или 5 ное запоминающее устройство, например,- на отдельных серийных электронных эле- на микросхемах К 573 РФ 2, КР 556 РТ 4.ментах, Запоминающее устройство 18 можетБлок 7 формирования корректирующих быть реализовано, например, на микросхевоздействий может быть реализован, на- мах запоминающих устройств, таких, какпример, в виде таблицы коэффициентов, за, К 155 РУ 2, КР 565 РУ 1 А,несенной в. программируемую логическую Первый 4, второй 12 и третий 20 суммаматрицу или в постоянное запоминающее торы могут быть реализованы, например, наустройство, например, на микросхемах микросхемах сумматоров, таких, какКР 573 РФ 2, КР 556 РТ 5, К 155 ИМ 2, К 155 ИМ 3. Инверсные. входы сумПри этом адресные входы микросхем 15 маторов могут быть реализованы, наприявляются входами блока 7 формирования мер, инверторами К 155 ЛН 1,корректирующих вОздействий, выходы мик- Первый 15 и второй 21 элементы срав, росхем являются выходами этого блока, нения могут быть реализованы, например,Блок 8 формирования управляющих на сумматорах с прямым"ййнверсным вховоздействий может быть реализован в виде 20 дами, осуществляющих операцию вычита-набора множительных элементов, количест ния кодов, выход знакового разрядаво которых равночислууправляемых входов сумматора является выходом элементаобъекта управления, например, на умножи-, сравнения, Такие сумматоры реализуютсятелях серии КР 1802. на обычных микросхемах сумматоровЗадатчик классов 120 может быть реа (К 155 ИМ 2, К 155 ИМЗ)с инверсными входализован, например, на программных"пере- ми на мйкросхемах К 155 ЛН 1.ключателях ПП 6-11 Т (ОЮЗ:602.160 ТУ), или Первый 13 и второй 19 множительныена запоминающих устройствах КР 573 Рф 2, элементы могут быть реализованы, наприКР 556 РТ 5, Такое запоминающее устройст- мер, на микросхемах умножителей серииво должно хранить набор эталонных сигна КР 1.802,лов для управляемых входов, Элемент И 16 может быть реализован,неуправляемых входов и показателей каче-. например, на микросхемах К 155 ЛИ 5, Элества объекта управления для всех классов мент НЕ 22 может быть реализован, напринеизмеряемых входов. Определение этих мер, на микросхемах К 155 ЛН 1.эталонов осуществляется на стадии проек, Элементы ЗАПРЕТ первой 23 и второйтирования системы оптимального управле групп могут быть реализован, например,.ния, например, по одному из известных на микросхемах К 155 ЛИ 1, Элементы ИЛИалгоритмов кластерного анализа, например 25 могут быть реализованы, например, на3 ЯООАТА, алгоритм Кинга и т.д, Другой путь микросхемах К 155 ЛЛ 1,построения эталоннь 1 х значений - построе Экономический эффект от внедренияние классов по результатам предваритель- предлагаемой системы образуется за счетных исследований сырья и объекта повышения качествауправления-путемувеуправления, или по оценкам экспертов, и личения объема выпускаемой продукции,вычисление средних арифметических зна- повышения качества продукции и снижениячений в каждом построенном классе.45 затрат на ее выпуск,Например; для непрерывногошйрокоЗадатчик режимов 11 может быть реа- полосного стана горячей прокатки стальныхлизован на программных переключателях, полос при внедрении указанной системынапример, ПП 6-11 Т (ОЮ.602.160 ТУ) или на возможно достижение годового экономичезапоминающих устройствах КР 556 РТ 5, 50 ского эффекта за счет увеличения отгрузкиКР 573 РФ 2, хранящих набор коэффициен- потеоретическомувесу;тов при переменных критериях оптимально- . Э = ТВ(К 2 - К 1)Ц - (КА + КР)СИ -сти. Определение этих коэффициентов КНСР = 2000000(0.0513 - 0,05)100000 -осуществляется на этапах проектирования (0.12 + 0,05)100000 - 0.15300000 = 200000или опытной эксплуатации системы в соот рубветствии с требованиями к качеству продук- где ТВ = 2000000 - объем отгрузки по теореции, Смена режимов и соответствующих им тическому весу, тонн;,коэффициентов производится при измене- К 1 = 0,05, К 2 = 0,0513 - коэффициенть 1нии сортамента или типоразмера выпускав- отгрузки по теоретическому весу до и послемой продукции. внедрения системы;Ц - 100 - цена заданного металла, рублей за тонну;КА - 0.12, КР = 0.05 - коэффициентыотчислений на амортизацию и текущий ремонт;КН0.15 - нормативный коэффициентэффективности;СР = 300000, СИ = 100000 - стоимостьразработки и изготовления системы, рублей,Доля эффекта, приходящаяся на предлагаемую систему, составит 25%, или 50000 рублей в год.формула изобретенияСистема адаптивного управления технологическим процессом, содержащая последовательно соединенные . блокформирования корректирующих воздейст. вий, блок формирования управляющих воз. действий и блок исполнительныхмехайизмов, выходы которого подключенык входам блока измерения сигналов управляемых входов и к управляемым входам объекта управления, неуправлямые входы,обьекта управления соединены с входамиблока измеренИя сигналов неуправляемыхвходов, выходы объекта управления соединены с входами блока измерения показателей качества, о т л и ча ю щ а я с я тем, что,с целью повышения качества управленияобъектов с неизмеряемыми входами, введены задатчик классов, задатчик режимов, блок определения оптимальных управляющих воздействий и блок классификации наблюдений. перваягруппа информационных5 входов которого соединена с выходами бло. ка измерения сигналов управляемых входов, вторая группа информационных входов блока классификации наблюдений соединена с выходами блока измерения сигналов10 неуправляемь 1 х входов, третья группа ин,формационных входов блока классификации наблюдений соединена с К выходами блока измерения показателей качества, информационный вход блока определения оп 15 тимальных управляющих воздействий . соединен с выходом блока классификациИ . наблюдений, первая группа информационных входов - с выходами блока измерения показателей качества, вторая группа инфор 20 мационных входов - с выхбдами блока из.мерения сигналов управляемых входов, выход блока определения оптимальных управляющих воздействИй подключен к входам блока формирования корректирующих25 воздействий и к группе входов блока формирования управляющих воздействий, выходы задатчика классов и зэдатчика режимов со. единены соответственно с входами задания блока классификации наблюдений и блокаЗО определения оптимальных управляющих воздействий.,1781670 аей Заказ 4274 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при Г 113035, Москва, Ж, Раущская наб., 45 оизводственно-издательский комбинат "Патент", г, Ужгород, ул.Г оставитель М,Анишинаехред М. Моргентал10 20 25 30 35 40 45 50 55 данных размеров проката и его физическиесвойства. Число классов неизмеряемого неуправляемого входа может определяться,например, числом нагревательных устройствс различной конфигурацией или режимом, количеством рабочих-операторов этихустройств с разной личной манерой управ. ления процессом нагрева, и т.п.Известна система адаптивного управления, содержащая последовательно соединенные блок формированиякорректирующих воздействий, блок формирования управляющих воздействий и объект управления, Недостатком этой системыявляется невысокое качество управления,т.к, при определении оптимальных управляющих воздействий не учитывались ни значения сигналов неуправляемых входовобъекта управления, ни влияние неизмеряемых входов объекта управления.Известно устройство для адаптивногоуправления технологическим процессом,принятое нами в качестве прототипа. содер-.жащее последовательно соединенные блокформирования корректирующих воздействий, блок формирования управляющих воздействий, блок исполнительныхмеханизмов и обьект управления. а такжеблок измерения сигналов управляемых входов, блок измерения сигналов неуправляемых входов и блок измерения показателей.качества, причем, входы блока измерениясигналов управляемых входов и блока измерения сигналов неуправляемых входов соединены с соответствующими входамиобъекта управления, а входы блока измерения показателей качества соединены с выходами объекта управления,Недостатком этого устройства являетсяневысокое качество управления, посколькувыбор управляющих воздействий осуществляется без учета влияния неизмеряемыхвходов объекта управления, которые оказывают существенное влияние на оптимальные значения управляемых переменных,Целью изобретения является повышение качества управления технологическимпроцессом.Цель достигается за счет того,что в систему адаптивного управления технологическим процессом, содержащуюпоследовательно соединенные блок формирования корректирующих воздействий,блок формирования управляющих воздействий и блок исполнительных механизмов,выходы которого подключены к входам блока измерения сигналов управляемых входови к упраляемым входам объекта управления,неуправляемые входы объекта управлениясоединены с входами блока измерения сигналов неуправляемых входов, а выходы объекта упралвения соединены с входами блока измерения показателей качества, введен блок классификации наблюдений, первая группа информационных входов которого соединена с выходами блока измерения сигналов управляемых входов, вторая группа информационных входов блока классификации наблюдений соединена с выходами блока измерения сигналов неуправляемых входов, третья группа информационных входов блока классификации наблюдений соединена с выходами блока измерения показателей качества, и блок определения оптимальных управляющих воздействий,информационный вход которого соединен с выходом блока классификации наблюдений, первая группа информационных входов - с выходами блока измерения показателей качества, вторая группа информационных входов - с выходами блока измерения сигналов управляемых входов, выход блока определения оптимальных управляющих воздействий подключен к входам блока формирования корректирующих воздействий и ко вторым входам блока формирования управляющих воздействий, а также задатчик классов и задатчик режимов, выходы которых соединены соответственно с входами задания блока классификации наблюдений и блока определения оптимальных управляющих воздействий, при этом объект управления имеет неизмеряемые входы р классов,Одновременно блок классификации наблюдений содержит узлы, состоящие иЭ первого сумматора и цепочек из второго сумматора и первого множительного элемента, два входа которого соединены с вы ходом второго сумматора, выходы первых множительных элементов являются выхода" ми цепочек и подключены к входам первого сумматора, число цепочек в каждом узле равно сумме числа управляемых входов, неуправляемых входов и выходов блока измерения показателей качества, число узлое равно числу р классов неизмеряемых входов объекта управления, первые входы соответ ствующих вторых сумматоров каждого узлй объединены и образуют соответственно первую, вторую и третью грпуппу информационных входов блока классификации наблюдений, вторые входы вторых сумматоров всех узлов являются входами задания блока классификации наблюдений, выход каждого первого сумматора соединен с первыми входами первых элементов сравнения, число которых на каждый сумматор на единицу меньше числа узлов, и со вторыми входами других первых элементов срав5 10 15 нения. число которых также на единицу меньше числа узлов, причем, первые входы каждого иэ этих других первых элементов сравнения подключены соответственно к выходам всех других первых сумматоров, общее число пеЬых элементов сравнения равно удвоенному числу сочетаний из числа узлов по два, выходы первых элементов сравнения,. первые входы которых соединены с одним и тем же первым сумматором, подключены к входам элементов И, число элементов И равно числу узлов, выходы элементов И подключены к входам шифратора, выход которого является выходом блока классификации наблюдений,Кроме того, блок определения оптимальных управляющих воздействий содержит вторые множительные элементы, число которых равно числу выходов блока измерения показателей качества, первые входы вторых множительных элементов образуют первую группу информационных входов блока определения оптимальных управляющих воздействий, вторые входы вторых множительных элементов являются входами задания блока определения оптимальных управляющих воздействий, выходы вторых множительных элементов соединены с входом третьего сумматора, .а также запоминающее устройство, адресный вход: которого является информационным входом блока определения оптимальных управляющих воздействий, выход третьего сумматора подключен к первому входу второго элемента сравнения и к первому информационному входу запоминающего устройства, первый информационный выход запоминающего устройства соединен со вторым входом второго элемента сравнения, выход второго элемента сравнения соединен с входом элемета НЕ и с управляющими входами первой группы элементов ЗАПРЕТ; информационные входы которых образуют вторую группу информационных входов блока определения оптимальных управляющих воздействий, выход элемента НЕ соединен с управляющим входом запоминающего устройства и с управ. ляющими входами второй группы элементов ЗАПРЕТ, информационные входы которых соединены со вторыми информационными выходами запоминающего устроиства, выходы первой группы элементов ЗАПРЕТ соединены со вторыми информационными входами запоминающего устройства и с первым входом группы элементов ИЛИ, вторые входы группы элементов ИЛИ соединены с выходами второй группы элементов ЗАПРЕТ. выходы группы элементов ИЛИ являются выходами блока 20 25 30 35 40 4550 определения оптимальных управляющих воздействий, число элементов ЗАПРЕТ первой группы равно числу элементов ЗАПРЕТ второй группы, а также равно числу элементов ИЛИ и равно числу управляемых входов объекта управления.Введение в систему блока классификации наблюдений и блока определения оптимальных управляющих воздействий, а также задатчика классов и задатчика режимов позволяет повысить качество управления за счет раздельного определения оптимальных управляющих воздействий по классам наблюдаемых величин, причем класс объединяет наблюдения, соответствующие близким значениям совокупности параметров неизмеряемых входов объекта управления, оценка близости параметров осуществляется блоком классификации наблюденийй.Предложенная система управления инвариантна к системе уравнений, описывающих объект управления, поскольку функционирование системы управления описывается не системой уравнений, описывающих объект управления, а выбранным при проектировании системы разбиением наблюдений на классы и критерием управления, Система обеспечивает управление объектом в соответствии с выбранным критерием управления (целевой функцией от показателей качества объекта управления) так, что управляющие воздействия на следующий временной интервал, выбор которых осуществляется в блоке 6 определения оптимальных управляющих воздействий, всегда обеспечивают минимальное значение целевой функции среди конечного числа допустимых управляющих воздействий на текущем временном интервале. Направление изменения управляющих воздействий - улучшение критерия управления. Система управления с использованием предлагаемого технического решения обладает выгодно отличающими ее свойствами: управление в ней осуществляется с учетом не только действующих на объект неуправляемых воздействий, но и ненаблюдаемых факторов, не теряя при этом свойств динамичности, адаптивности и устойчивости,Устойчивость системы, понимая под этим термином ограниченность приращения управляющих воздействий при ограниченном изменении входных данных (см. /10/, стр, 12). обеспечивается тем, что при изменениях входных переменных, ограниченных одним классом, управляющие воздействия гарантированно выбираются из одного и того же класса в условиях действияодного и того же критерия управления и, следовательно, ограничены размерами класса,Динамичность управления следует из учета временных изменений векторов неуправляемых переменных, управляемых переменных, показателей качества и принадлежности совокупности пзременных классам.Адаптивность управления обеспечивается изменением вектора принадлежности классам в темпе с изменениями всех наблюдаемых и ненаблюдаемых входных величин,На фиг. 1 приведена блок-схема системы; на фиг. 2 - блок-схема блока классификации наблюдений; на фиг. 3 - блок-схема блока определения оптймальных уйравляющих воздействий,Система (фиг, 1) содержит объект управления 1 с т управляемыми входами, и неуправляемыми входами, неизмеряемыми входами р классов, блок 2 измерения сигналов неуправляемых входов, блок 3 измерения сигналов управляемых входов, блок 4 измерения показателей качества с К выходами, блок 5 классификации наблюдений, блок 6 определения оптимальных управляющих воздействий, блок 7 формирования корректирующих воздействий, блок 8 формирования управляющих воздействий, блок 9 исполнительных механизмов, задатчик классов 10 и задатчик режимов 11,Неуправляемые и входов объекта управления 1 соединены с п входами блока 2 измерения сигналов неуправляемых входов, выходы объекта управления 1 подключены к входам блока 4 измерения показателей качества, в выходов блока 3 измерения сигналов управляемых входов соединены с первой группой информационных входов блока 5 классификации наблюдений, вторая группа информационных входов блока 5 классификации наблюдений соединена с и выходами блока 2 измерения сигналовнеуправляемых входов, а третья группа информационных входов блока 5 классификации наблюдений соединена с к выходами блока 4 измерения показателей качества, при этом рф(в+и+к) входов задания блока 5 классификации наблюдений соединены с выходами задатчика классов 10, а выход блока 5 классификации наблюдений соединен с информационнымвходом блока 6 определения оптимальных управляющих воздействий, Задатчик режимов 11 своими Е выходами соединен с соответствующими К входами задания блока 6 определения оптимальных управляющих воздействий, первая группа информационных входов которого соединена свыходами блока 4 измерения5 10 показателей качества, а третья группа информационных входов (а входов) с в выходами блока 3 измерения сигналов управляемых входов, в выходов блока 6 определения оптимальных управляющих воздействий подключены к щ входам блока 7 формирования корректирующих воздействий и к щ вторым входам блока,8 формирования управляющих воздействий, при этом в первых входов блока 8 формирования упзадания (от номинала) по всей длине полосы, среднеквадратическое отклонение ширины полосы от задания по всей длинеполосынеизмеряемые входы; различные режимы нагрева заготовки (сляба), характеризующиеся особенностями конструкции нагревательных устройств (например - на стане разные печи, из которых выдаются слябы на прокатку произвольным образом)) разные бригады операторов с индивидуаль 50 55 равляющих воздействий соединены с а выходами блока 7 формированиякорректирующих воздействий, а гп выходовблока 8 формирования управляющих воз 15 действий соединены с соответствующими щвходами блока 9 исполнительных механиз-.мов, е выходов блока 9 исполнительныхмеханизмов подключены к щ управляемымвходам объекта управления 1 и к гп входам20 блока 3 измерения сигналов управляемыхвходов,Объектуправления представляетсобой,например, непрерывный широкополосныйстан горячей прокатки стальных полос, Ко 25 личество классов р зависит от ненаблюдаемых факторов, действующих на объектуправления, и равно числуо различных комбинаций из всех возможных качественныхзначений этих факторов, Количество клас 30 сов определяется, исходя из особенностейконкретного объекта управления, на стадиипредварительной разработки системы,Для объекта управления - непрерывного широкополосного стана горячей прокат 35 ки - можно привести следующийупрощенный набор входных и выходных переменных:управляемые входы (два): вертикальныеи горизонтальные обжатия заготовки (или40 отклонения этих обжатий от какой-либо базы);неуправляемый вход(один): толщина заготовки (или ее отклонение от заданной, откакой-либо базы и т,п,);45 выходы (два), толщина и ширина проката (или их отклонения от задания на прокатку);показатели качества (два), среднеквадратическое отклонение толщины полосы от10 20 25 30 40 узлов (например, 3), выходы элементов И 45 50 55 ными особенностями ведения процесса нагрева и т,д, - всего три вида режимов, т.е, -три класса неизмеряемых входов,Для такого упрощенного набора переменных, характеризующих систему управления может быть использована целеваяфункция вида:С = К 1Е 1 + К 2Е 2где С - значение целевой функции;К 1, К 2 - коэффициенты при переменныхцелевой функции;Е 1 - первый показатель качества, например, среднеквадратическое отклонениетолщины полосы от задания по всей длинеполосы;22 - второй показатель качества, например, среднеквадратическое отклонение ширины полосы от задания по всей длинеПОЛОСЫ.Целью управления является выпускпроката с минимальным среднеквадратическим отклонением по толщине и ширине отзадания с учетом влияния неизмеряемыхвходов объекта управления, т.е. необходимовыдавать управляющие воздействия на исполнительные механизмы с адаптацией подтекущий класс неизмеряемых входов (в зависимости оттого, как именно была нагретазаготовка перед прокаткой),Блок 5 классификации наблюдений. К - количество выходов блока измеренияпоказателей качества) и первого сумматора14. Каждая из цепочек содержит второй сумматор 12 и первый множительный элемент13, Блок классификации наблюдений 5включает в себя также. первые элементысравнения 15, количество которых на каждый из р узлов равно р, элементы И 16,число которых равно числу узлов р и шифратор 17. Таким образом, для в = 2, п = 1, К = 2и р= 3 блок классификации наблюдений 5содержит (см,фиг. 3): вторых сумматоров 12 -р(оп+и+к) =3+(2+1+2) =15, первых множительных элементов 13 - р(гп+и+К) = 3+(2+1+2) =15, первых сумматоров 14 - р = 3, первыхэлементов сравнения 15 - р-(р) = 32 = 6,элементов И 16 - р = 3, шифратор 17 - 1.В каждой из цепочек; содержащих второй сумматор 12 и первый множительныйэлемент 13, оба входа первого множительного элемента 13 соединены с выходом второго сумматора 12, вторые сумматоры 12выполнены с прямым первым и инверснымвторым входами,Первые входы вторь 1 х "у 1 лЮатароЬ 12 объединены по всегл р узлаМ так, что сбатветствующие щ, п, 1 первых входов вторых сумматоров 12 образуют, соответственна, первую, вторую и третью группы информационных входов блока 5 классификации наблюдений,Вторые входы вторых сумматоров 12 всех узлов являются входами задания блока 5 классификации наблюдений, сигналы на этих входах соответствуют эталонным значениям, соответственно, гп сигналов управ- ляемых входов, п сигналов неуправляемых входов и М показателей качества для всех р классов. Выходы первых множительных элементов 13 каждого узла являются выходами цепочек и соединены с входами первых суматоров 14 данного узла,Выходы первь 1 х сумматоров 14 являются выходами узлов и соединены с первыми входами первых элементов сравнения 15, количество которых на каждый из первых сумматоров на единицу меньше числа узлов (например - 2, фиг, 2), и со вторым входами других первых элементов сравнения, число которых также на единицу меньше числа узлов (например - 2), причем, первые входы каждого из этих других первых элементов сравнения подключены, соответственно, к выходам всех других первых сумматоров,общее число первых элементов сравнения равно удвоенному числу сочетаний из числа узлов по 2 (например, для трех узлов число сочетаний из 3 па 2 равно 3, число первых элементов сравнения равно 6). Выходы первых элементов сравнения, первые входы которых соединены с одним и тем ке первым сумматором, подключены к входам элементов 16 И, число элементов И равно числу подключены к входам шифратора 17, выход которого представляет собой шифр класса, к которому относится данное наблюдение, Наблюдение представляет собой совокупность значений переменных системы управления - интегральных значений измеренных величин Сигналов управляемых входов объекта управления, неуправляемых входов объекта управления и показателей качества системы управления, соответствующих одному и тому же временному интервалу (для обьекта управления широкополосного стана горячей пракатки - интервалом является время проката одной полосы). Шифр класса, к которому относит. ся данное наблюдение, является выходамблока классификации наблюдений.Блок 6 определения оптимальных управляющих воздействий (фиг. 3) содержит запоминающее устройство 18, группу из 1 =10 20 25 30 35 40 45 55 2 вторых множительных элементов 19, число которых равно числу выходов блока 4 измерения показателей качества, третий сумматор 20, второй элемент сравнения 21, элемент НЕ 22, элементы ЗАПРЕТ 23 первой группы, элементы ЗАПРЕТ 24 второй группы, и группу элементов 25 ИЛИ, число элементов 23 ЗАПРЕТ первой группы равно числу элементов 24 ЗАПРЕТ второй группы,а также равно числу т управляемых входов объекта управления.Первые входы вторых множительных элементов 19 образуют первую группу информационных входов блока 6 определенияоптимальных управляющих воздействий,вторые входы вторых множительных элементов 19 являются входами задания блока 6 определения оптимальных управляющих воздействий, выходы вторых множительных элементов 19 соединен ы со входом третьего сумматора 20.Выход третьего сумматора 20 подключен к первому входу второго элемента сравнения 21 и к первому информационному входу запоминающего устройства 18 Адресный вход запоминающего устройства 18 являетя информационным входом блока 6 определения оптимальных управляющих воздействий, первый информационный вход запоминающего устройства 18 соединен со вторым входом второго элемента сравнения 21, выход второго элемента сравнения 21 соединен с входом элемента НЕ и с управляющими входами элементов 23 ЗАПРЕТ первой группы Информационные входы элементов 23 ЗАПРЕТ первой группы образуют вторую группу информационных входов блока 6 определения оптимальных управляющих воздействий, Выход элемента НЕ 22 соединен с управляющим входом запоминающего устрОйства 18 и с управляющими входами элементов ЗАПРЕТ 24 первой группы, Информационные входы элементов ЗАПРЕТ второй группы соединены со вторыми информационными выходами запоминающего устройства и-с первыми входами группы элементов 25 ИЛИ, Вторые входы группы элементов 25 ИЛИ соединены с выходами элементов 24 ЗАПРЕТ второй группы, выходы группы элементов 25 ИЛИ являются вйходами блока 6 определения оптимальных управляющих воздействий,Система работает следующим образом,Объект управления 1 (непрерывный широкополосный стан горячей прокатки) осуществляет технологический процесс, например, прокатку металла. На стан подаются нагретые заготовки (слябы), После обжатия слябов между валками клетей стана сляб вытягивается в полосу, Блок 2 измерения сигналов неуправляемых входов измеряет воздействующие на объект управления неуправляемые переменные, Блок 3 измерения сигналов управляемых входов измеряет воздействующие на объект управления уп ра вля ем ые перемен н ые (выходн ые переменные блока 9 исполнительных механизмов). Блок 4 измерения показателя качества измеряет выходные переменные объекта управления 1 и преобразует их в показатели качества системы управления.Измерение сигналов блоками 2, 3, 4 осуществляется, как это принято в измерительной технике, путем преобразования измеряемой величины (как электрического сигнала, так и не электрического) в стандартный электрический сигнал и его усредения, что интегрально(по всей полосе) характеризует процесс прокатки, Блок 4 измерения показателей качества дополнительно преобразует выходные переменные объекта управления 1 в показатели качества системы управления технологическим процессом,Выходные сигналы блока 2 измерения сигналов неуправляемых входов, блока 3 измерения сигналов управляемых входов и блока 4 измерения показателей качества поступают соответственнона вторые, первые и третьи группы информационных входов блока 5 классификации наблюдений, Кроме того, выходные сигналы блока 3 измерения сигналов управляемых входов и блока 4 измерения показателей качества поступают, соответственно, на вторую и первую группы информационных входов блока 6 определения оптимальных управляющих воздействий. На входы задания блока 5 классификации наблюдений и блока 6 определения оптимальных управляющих воздействий поступают сигнал й, соответственно, от задатчика классов 10 и задатчика режимов 11, Сигналы задания задатчика классов 10 представляют собой по- классовые эталонные значения всех измеряемых входов и показателей качества объекта управления, Сигналы задания задатчика режимов 11 представляют собой коэффициенты целевой. функции при показателях качества обьекта управления,Блок классификациинаблюдений 5 по состоянию всех измеряемых входов и показателей качества объекта управления системы (сигналы от блоков 2, 3 и 4) для текущего наблюдения и поклассовым эталонным зна-, чениям всех измеряемых входов и показателей качества (сигналы от задатчика классов 10) определяет номер класса, к которому относится данное наблюдение. Выбор номера класса осуществляется вычислением5 10 15 20 30 35 40 45 50 55 расстояний в пространстве измеряемых переменных системы от точки текущего наблюдения до точек с эталонными значениями переменных и показателей качества по всем классам, и выбором номера класса, к которому относится текущее наблюдение, по минимальному из этих расстояний,Блок 6 определения оптимальных управляющих воздействий по номеру класса текущего наблюдения (сигналы от блока 5 классификации наблюдений), значениям управляемых переменных и показателей качества (сигнал от блока 3 измерения сигналов управляемых входов и блока 4 измерения показателей качества) и коэффициентам це- левой функции при показателях качества (сигналы от задатчика режимов 11) вырабатывает "оптимальное. управляющее воздействие для объекта управления на следующий временной интервал, длина которого равна времени проката одной полосы, Целевая функция представляет собой функцию от показателей качества, которая является численным выражением для качества управления, Определение оптимального управляющего воздействия осуществляется по текущему значению критерия оптимальности для текущего наблюдения) и запомненному наилучшему значению критерия оптимальности для данного класса - или выбором известного (запомненного ранее) управления, или поддержанием текущего управления. Выработанное в блоке 6 определения оптимальных управляющих воздействий управление передается на входы блока 7 формирования корректирующих воздействий и блока 8 формирования управляющих воздействий,Блок 7 формирования корректирующих воздействий по значениям оптимальных управляющих воздействий, поступающим с выхода блока 6 определения оптимальных управляющих воздействий, формирует значения корректирующих воздействий, которые с его выхода поступают на вход блока 8 формирования управляющих воздействий, Эти значения представляют собой коэффициенты, на которые необходимо умножить значения оптимальных управляющих воздействий, чтобы получить реально допустймые значения управляющих воздействий, Указанные коэффициенты имеют смысл ограничений, например, по технологическим режимам, по возможностям исполнительных механизмов, по соображениям техники безопасности и т,д, Блок 8 формирования управляющих воздействий для каждой управляемой переменной осуществляет умножение оптимальных управляющих воздействий (выходные сигналы блока 6 формирования оптимальных управляющих воздействий) на коэффициенты (выходные сигналы блока 7 формирования корректирующих воздействий), Управляющие воздействия с выхода блока 8 формирования управляющих воздействий поступают на вход блока 9 исполнительных механизмов и через его исполнительные механизмы воздействуют на технологический процесс, осуществляемый обьектом управления 1. Таким образом, после прокатки очередной полосы на выходах блоков 2, 3 и 4 формируются новые переменйые системы и соответствующие им показатели качества, Для этих значений переменных и показателей качества блок 5 классификации наблюдений по эталонным значениям переменных и показателей качества для каждого класса (поступающих с выходов задатчика классов 10) определяет номер класса, к которому относится данная полоса, Этот номер передается на информационный вход блока 6 определения оптимальных управляющих воздействий, Блок 6 по номеру класса, сигналам управляемых входов, показателям качества и коэффйциентам целевой функции для следующей полосы (поступающих с выходов задачика режимов 11) определяет уставки оптимальных управляющих воздействий для прокатки следующей полосы, Окончательное формирование уставок производится блоком 8 формирования управляющих воздействий перемножением соответствующих выходных сигналов блоков 6 и 7, Сформированные таким образом уставки подаются на входы блока 9 исполнительных механизмов и определяют режимы работы исполнительных механизмов обьекта управления 1 на время прокатки следующей полосы, После и рокатки следующей полосы процесс повторяется, причем, для каждой полосы выбирается управление, обеспечивающее поддержание или улучшение значения целевой. функции. Тем самым обеспечивается адаптивное управлениетехнологическим и роцессом. Блок 5 классификации наблюдений(фиг. 2) работает следующим образом,Вторые сумматоры 12, первые множительные элементы 13 и первые сумматоры 14 осуществляют вычисление расстояний в пространстве переменных систем от точки текущего наблюдения до точек эталонных значений по классам, например, по формуле25 ние эталонных значений осуществляется настадии проектирования системы путем обработки экспериментальных данных по из 40 45 50 55 где д - расстояние между точкой текущего наблюдения и точкой 1 го класса с эталонными значениями измеряемых переменных;х 1,) =1 п - значения сигналов управляемых входов для текущего наблюдения;1 ь= 1.а - эталонные значения управляемых входов для 1-го класса;уя, о = 1.п - значения сигналов неуправляемых входов для текущего наблюдения;1 +о, о =1 п - эталонные значения сигналов неуправляемых входов для 1-го класса;, 1 = 1,К - значения выходных сигналов блока измерения показателей качества для текущего наблюдения;1 п+пн, 1 = 1 К - эталонные значения1показателей качества для 1-го класса,Значения входных переменных и показателей качества объекта управления 1 для текущего наблюдения поступают на прямые входы первых сумматоров 12 для всех р узлов блока классификации наблюдений. На инверсные входы сумматоров 12 с выхода задатчика классов 10 поступают эталонные значения всех и+и+1 измеряемых переменных системы для всех р классов. Определевестным алгоритмам (8), Выходной сигнал каждого из сумматоров 12 представляет собой разность измеренного и эталонного значений каждой переменной, Этот сигнал подается на оба входа соответствующего первого множительного элемента 13, который осуществляет возведение в квадрат своего входного сигнала. Выходные сигналы первых множительных элементов 13 каждога узла подаются на входы первого сумматора 14 этого же узла, Таким образом, выходной сигнал первого сумматора 14 узла, относящегося к 1-му классу, имеет смысл суммы квадратов расстояний в пространстве переменных системы от точки текущего наблюдения до точки 1-го класса с эталонными значениями измеряемых переменных 1- го класса,Выходные сигналы первых сумматоров 14 всех р узлов в сочетаниях по 2 поступают нэ входы первых элементов сравнения 15 осуществляющих попарное сравнение выходных сигналов первых сумматоров 14, Выходные сигналы первых элементов сравнения 15, первые входы которых подключены к одному и тому же первому сумматору 14, подаются на входы элементов И 16,Каждый из первых элементов сравнения 15 срабатывает (формирует на выходе сигнал 1); если сигнал нэ его втором входе больше,5 10 15 20 чем сигнал на его первом входе, т,еесли квадрат расстояния в пространстве измеряемых переменных системы от точки текущего наблюдения до точки с эталонными значениями класса (и соответствующего ему узла), соответствующего первому входу первого элемента сравнения 15, меньше, чем аналогичная величина для другого класса (и соответствующего ему узла), соответствующего второму входу этого первого элемента сравнения 15, Таким образом, если на первый вход какого-либо первого элемента сравнения 15 поступает сигнал с выхода первого сумматора 1-го узла, а на второй вход того же сумматора поступает сигнал с выхода первого сумматора 1-го узла, то этот первый элемент сравнения вырабатывает выходной сигнал "1" в том случае, когда наблюдение блике к.эталонному набору значений переменных 1-го класса, чем к набору)-го класса, т.е. если сигнал на его первом входе меньше, чем на втором.Сигналы с выходов первых элементов сравнения 15, первые входы которых соединены с выходом одного и того же первого сумматора 14 1-го узла, поступают на входы одного из элементов И 16, Если все входные сигналы элемента И 16 равны "1", то на его выходе тэкке появляется сигнал "1", Это означает, что точка текущего наблюдения в пространстве измеряемых переменных системы расположена ближе к точке с эталонными значениями класса 1, чем ко всем остальным точкам с эталонными значениями других классов, При этом на выходах других элементов И 16 будет сформирован сигнал "0", Выходные сигналы всех элементов И 16 подаются на входы шифратора 17, на выходе которого формируется код класса 1 с наименьшим расстоянием в пространстве измеряемых переменных системы от точки текущего наблюдения до точки с эталонными значениями переменных 1 класса, В случае, если расстояния между точкой текущего наблюдения и эталонными точками для двух классов равны и меньше расстояний между точкой текущего наблюдения и эталонными точками для всех других классов, на выходах всех элементов И 16 будет сигнал "0".,Шифратор 17 выполнен на основе таблицы, занесенной в программируемую логическую матрицу или в программируемое ПЗУ, Случай равных минимальных расстояний относится при проектировании системы к одному из классов, Конкретный вид таблицы шифратора 17 определяется на этапе проектирования систеБлок 6 определения оптимальных управляющих воздействий см.фиг, 3) работаных входов блока определения оптималь- формационные выходы значения управляеных управляющих воздействий, с выходов мых переменных системы, соответствую- блока измерения показателей качества 4 щие данному классу текущего наблюдения (см.фиг, 1) поступают измеренные показате- и значению целевой функции на первом вхоли качества системы, 5 де запоминающего устройства 18. УказанНа вторые входы вторых множительных ные значения управляемых переменных элементов 19, которые являются входами системы поступают на информационные задания блока 6 определения оптимальных входывторой группы элементов ЗАПРЕТ 24, управляющих воздействий, с выходов за- Второй элемент сравнения 21 осущестдатчика режимов 11 (см,фиг. 1) поступают 10 вляетсравнениезначения целевой функции коэффициенты целевой функции, Эти коэф- для текущего нэблюдейия (на первом входе) фициентызависятотспецификиобъекта уп- и наилучшего ранее достигнутого значения равления и выбираются . на стадии целевой функции класса, к которому отнопроектирования системы управления для сится текущее наблюдение (на втором вхоразных режимов работы, 15 де). Если значение целевой функции. Вторые множительные элементы 19 текущего наблюдения "лучше", чем наилуч(см.фиг, 3) осуществляют умножение пока- шееизранеедостигнутыхзначенийцелевой зателей качества системы на соответствую- функции класса, к которому относится текущиеим коэффициенты целевой функции, щее наблюдение,товторойэлементсравнезначения произведений указанных величин 20 ния 21 формирует на своем выходе сигнал с выходов вторых множительных элементов "1", Например, если целевая функция по поступают на входы третьего сумматора строена на минимизации отклонения пока, который суммирует значения этих про- зателей качества от заданнь 1 х стандартом изведений, Таким образом, вторые множи- для технологического процесса, то лучшим тельные элементы 19 и третий сумматор 20 25 из двух значений является минимальное осуществляют вычислительные значения значение целевой функции,целевой функции для конкретной совокуп-Выходной сигнал второго элемента ности значений показателей качества систе- сравнения 21 подается на управляющие мы (для текущего наблюдения), Это входы первой группыэлементов ЗАПРЕТ 23 значение поступает на первый вход второго 30 и через элемент 22 - инверсно - на управля элемента сравнения 21 и на первый инфор- ющие входы второй группы элементов ЗА- . мационный вход запоминающего устройст- . ПРЕТ 24 и запоминающего устройства 18.ва 18. На информационные входы первойНа адресный вход запоминающего уст-, группы элементов ЗАПРЕТ 23, которые обройства 18, который является информаци разуют вторую группу информационных , онным входом блока 6 определения входовблокаопределенияоптимальныхупоптимальных управляющих воздействий, с равляющих воздействий, с выходов блока 3 выхода блока классификации наблюдений 5 измерения сигналов управляемых входов поступает код класса, к которому относитсяпоступают измеренные значения сигналов текущее наблюдение. В соответствии с этим 40 управляемых входов обьекта управления 1, кодом из запоминающего устройства 18 . Элементы ЗАПРЕТ 23 первой группы и считывается и выдается на его первый информа- элементы ЗАПРЕТ второй группы могут пеционный выход наилучшее достигнутое за пред- редавать на свои вьходы значения сигналов шествующий период наблюдений значение оптимальных управляющих воздействий.целевой функции данного класса, это значе Если нэ выходе второго элемента сравненияние поступает на второй вход второго эле сформирован сигнал "1", то открываютсямента сравнения 21, Начальная матрица элементы ЗАПРЕТ 23. а элементы ЗАПРЕТ оптимальных управляющих воздействий по 24 закрываются. Если на выходе второго классам переменных и соответствующий элемента 21 сформирован сигнал "0", то отвектор значений целевой функции строятся 50 крываются элементы ЗАПРЕТ 24, а элеменнаэтапепроектирования конкретнойсисте- гы ЗАПРЕТ 23 закрываются, Выходы мы управления и заносятся в запоминаю- элементов ЗАПРЕТ 23 и ЗАПРЕТ 24 подаютщее устройство, По мере работы системы ся на входы группыэлементов ИЛИ 25, Т,к.матрица обновляется путем записи в запо- элементы первой 23 и второй 24 групп ЗА- минающее устройство 18 лучших в смысле 55 ПРЕТ не могут быть открыты одновременно, установленного критерия оптимальности то на выходах элементов ИЛИ 25, которые управляющих воздействий, Одновременно являются выходами блока 6 определения в соответствии с кодом класса текущего на- оптимальных управляющих воздействий,блюденияиззапоминающегоустройства 18 появляются или сигналы управляемых вхосчитываются и выдаются нэ его вторые ин- дов обьекта управления 1 с выхода блока 3
СмотретьЗаявка
4769955, 15.12.1989
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ЧЕРМЕТАВТОМАТИКА"
АНШИНА МАРИНА ЛЬВОВНА, ДАШЕВСКИЙ БОРИС ВИКТОРОВИЧ, КАЗАНЦЕВА ЕЛЕНА ВАСИЛЬЕВНА, КРАСИЛЬНИКОВ ВАДИМ СЕРГЕЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: адаптивного, процессом, технологическим
Опубликовано: 15.12.1992
Код ссылки
<a href="https://patents.su/14-1781670-sistema-adaptivnogo-upravleniya-tekhnologicheskim-processom.html" target="_blank" rel="follow" title="База патентов СССР">Система адаптивного управления технологическим процессом</a>
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1328766
Опубликовано: 07.08.1987
Авторы: Головков, Кузнецов, Недвецкая, Осипов, Павлов
МПК: G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...6 обработки и программного управления поочередно подключает датчики 11 к входу АЦП 5, с выхода которого информация о величине напряженности поля в отрезке микрополосковой линии ных составляющих светового луча (необыкновенный луч) приобретает Фазо- .вьй сдвиг, онределяемый выражением 2, 2 2= 1 с 11 .з 1 п - й + 1 с 11 з 1 п1 Ъ1 Таким образом, в режиме калибровки устанавливается длина удлинителя 13 аптического пути, равная 11=(И + - ). В этом случае вышедший8из подложки отрезка микрополосковой линии 2 луч имеет сдвиг Фазы необыкновенного луча, пропорциональный квадрату амплитуды поля в данном сечении отрезка микрополосковой линии 2 и независящий от времени. Отградуировав предварительно устройство, изменяющее длину оптического пути...
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1741034
Опубликовано: 15.06.1992
Авторы: Воронов, Головков, Осипов, Павлов, Приходько
МПК: G01N 22/00, G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...для реализации интерференции двух световых лучей,прошедших через сечение измерительной линии 2. Фотоприемник 13 предназначен для преобразования интенсивности светового луча на выходе сумматора 12 света в электрический сигнал. Источник 3 смещения предназначен для установки требуемой рабочей точки на модуляционной характеристике интерферометра.Устройство работает в двух режимах; режиме калибровки и режиме измерения,В режиме калибровки к измерительной линии 2 вместо исследуемого элемента подключается эталонная короткозамкнутая линия. Сигнал СВЧ-генератора 1 поступает на вход измерительной линии 2 и далее на эталонную линию. В результате интерференции падающей и отраженной волн СВЧ-сигнала в измерительной линии устанавливается режим...
Струйный пьезокерамический элемент с электрическим входом

Номер патента: 387154
Опубликовано: 01.01.1973
Авторы: Вайсман, Джагупов, Кенгерлинский, Химии
МПК: F15C 5/00
Метки: входом, пьезокерамический, струйный, электрическим, элемент
...между этими электродами, поляризованы,Это позвол укцию и повысить над методОМ напыления или металлйзацйи нанят сится на стенки питающего канала, перпендикулярные плоскости пластины. Электрод 4 электрически соединен с серебряной пленкой.5 Области п 1 и п 2 соответственно между электродом 2 и серебряной пленкой и электродом 3 и серебряной пленкой неполяризованы и обладают пьезоэффектом.Управление потоком воздуха с помощью 10 внешнего электрического сигнала в описаннойконструкции струйного элемента осуществляется следующим образом, Электрический сигнал подается на электроды 2, 3 и 4, в результате чего между серебряной пленкой и элект родами 2 и 3 в областях, обладающих пьезоэффектом, возникает электрическое поле. За счет...
Устройство приоритетного обращения процессоров к общему блоку памяти данных

Номер патента: 682898
Опубликовано: 30.08.1979
МПК: G06F 13/18, G06F 9/50
Метки: блоку, данных, обращения, общему, памяти, приоритетного, процессоров
...+ 1 + П 1 ах СХ (подкд И 11,12+ в(2) ГДЕ 1 доднл ВРЕМЯ ПОДКЛ 1 ОЧЕНИЯ ПРОЦЕССОров к шинам, связывающим его с ЗУ.Сигнал с выхода элемента 7 ИЛИ поступает на первый вход запускающего элемента 15 И, на втЬрой вход которого подается единичный сигнал с инверсного выхода счетчика 3, а на третий вход - единичный сигнал с выходного элемента 8 ИЛИ. В том случае, если четвертый вход запускающего элемента И открыт единичным сигналом, с нулевого выхода триггера 2, сигнал с выхода запускающего элемента И перебрасывает триггер 2 в состояние, при котором на его выходе появляется единичный сигнал, поступающий на выходную шину 27 запроса и далее на управляющий вход ЗУ. Сигнал с инверсного выхода триггера занятости блокирует возможность поступления от...
Управляемый элемент сеточной электро-модели

Номер патента: 822217
Опубликовано: 15.04.1981
Авторы: Атрушкиевич, Блейерс, Родэ
МПК: G06G 7/46
Метки: сеточной, управляемый, электро-модели, элемент
...входами счетчика 35 адресов и счетчика 33.Выход регистра 37 информации связан с регистром 9 и с цифроаналоговым преобразователем 38, соединенным с первым входом сумматора 39, второй вход которого подключен к первому выходу блока 1 проводимости. Выход сумматора 39 связан с блоком 5 аналоговой памяти.Для упрощения изложения изобретения управляемый элемент показан с тремя резистивно-ключевыми ветвями, В реальных сеточных электромоделях применяют управляемые элементы с 10- 15 резистивно-ключевыми ветвями,Устройство работает следующим образом. Управляемый элемент сеточной электромодели включают в схему и задаютнеобходимый режим работы, В программный блок 4 записывают программу работы, по этой программе включают счетчик 33, на первый вход...
Предыдущий патент: Устройство для коррекции шкалы времени
Следующий патент: Устройство программного управления
Случайный патент: Центробежная мельница