Способ управления точным положением предметов, сортируемых на автоматическом сортировочном пункте
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 2004479
Автор: Франческо
Текст
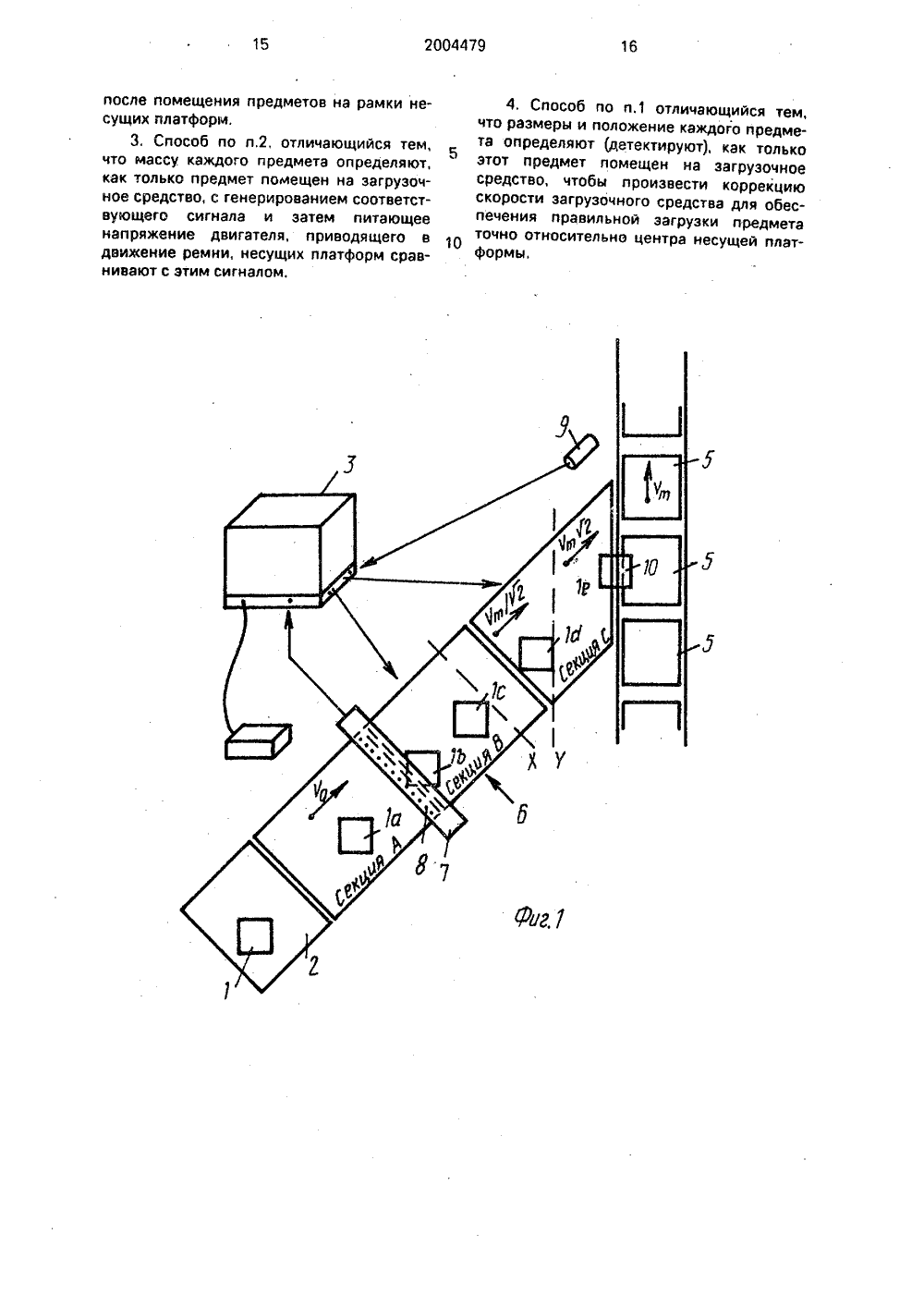
(в) К 3 (и (э 1) 5 В б 5647 ОПИСАНИЕ ИЗОБРЕТ ПАТЕНТУ Комитет Российской Федерации о патентам и товарным знакам(54) СПОСОБ УПРАВЛЕНИЯ ТОЧНЫМ ПОЛОЖЕНИЕМ ПРЕДМЕТОВ, СОРТИРУЕМЫХ НААВТОМАТИЧЕСКОМ СОРТИРОВОЧНОМПУНКТЕ(5) Сущность изобретения: способ управленияточным положением предметов, сортируемых наавтоматическом сортировочном пункте, включающий в себя стадию помещения предметов на загрузочное средство, состоящее иэ множества вращающихся погрузочных ремней, расположенныхпоследовательно друг за другом и установленныхпод углом 45 к направлению перемещения множества несущих платформ, и стадию передачипредметов на несущие платформы за счет вращения погрузочных ремней со скоростью компоненты,направленной в сторону движения несущих платформ и равной скорости последних отличающийся тем, что предметы перемещают на несущие платформы за счет поперечно установленных на них вращающихся от двигателя с регулируемой скоростью ремней, причем последние приводят во вращение в момент подачи на них предмета со скоростью равной скорости движения погрузочных ремней загрузочного средства и направляют поперек по отношению к направлению движения несущих платформ Скорость вращения ремней замед - ляется после помещения предметов на рамки несущих платформ Масса каждого предмета определяется, как только предмет помещен на загрузочное средство, с генерированием соответствующего сигнала, и затем питающее напряжение двигателя, приводящего в движение ремни, несущих, платформ сравнивается с этим сигналом. Размеры и положение каждого предмета определяются детектируются), как только этот предмет помещен на загрузочное средство, чтобы произвести коррекцию скорости загрузочного средства дпя обеспечения правильной загрузки предмета точно относительно центра несущей платформы. 3 зл.ф-лы, 13 ил.О2004479 Составитель Т.ЩеглаковТехред М,Моргентал рректор М. Керецман Редактор Е.Полионова писное аказ 3374 л. Гагарина, 1 О оизводственно издательский комбинат "Патент", г, Ужго Тираж НПО "Поиск"Роспа13035, Москва, Ж, Рау такая наб 4/5Изобретение применяется в пунктахсортировки, большого количества предметов, например на почте. при пересылке посылок, бандеролей, Эти операцииуправляются центральным компьютером, 5который синхронизирует различные функции.Известен способ управления точнымпредложением сортируемых предметов наавтоматическом сортировочном пункте, заключающийся в перемещении предметовпогрузочным конвейерным устройствомпод углом 45 к передающему конвейерному устройству, и в передаче предмета на.последнее со скоростью компоненты, направленной в сторону движения передающего конвейерного устройства, равнойскорости последнего 1),Наиболее близким к предлагаемому является способ управления точным положением сортируемых предметов наавтоматическом сортировочном пункте, заключающийся в установке предметов на загрузочное средство, состоящее измножества вращающихся ремней, расположенных друг за другом и установленных подуглом 45 к направлению перемещениямножества несущих платформ, и передачепредметов на несущие платформы эа счетвращения погруэочных ремней со скоростью компоненты, направленной в сторонудвижения несущих платформ, равной скорости последних 2).На фиг. 1 схематически изображена позиция загрузки сортирующего пункта и различные функции. выполняемые всоответствии с предложенным способом; нафиг. 2- положение предмета на ременномконвейере при погрузке; на фиг. 3 - диаграмма скорости предмета на различных этапах погрузки на платформу; на фиг. 4 -переход предмета на платформу; на фиг. 5 диаграмма скорости предмета во время перехода на платформу; на фиг. 6 - структурная схема устройств привода, позволяющая 45получить управляемое рассеяние лишнейкинетической энергии во время загрузкиплатформы; на фиг. 7 - схема эквалайзерадля двигателей устройств привода; на фиг,8 - повторная центровка предмета на платформе перед разгрузкой; на фиг, 9 - то же,повторная центровка; на фиг. 10 - вариантповторной центровки на фиг. 9; на фиг, 1113 структурные схемы операций, выполняемые по предлагаемому способу. 55Процесс погрузки осуществляется следующим образом.Предмет 1 помещается или непосредственно оператором, или с ленточного транспортера на блок синхронизации 2,выполненный из подвижного ремня. Когда предмет 1 находится в этой позиции оператор передает характеризующие, предмет данные с помощью клавиатуры 4 центральному компьютеру 3, Другое устройство (не показанное на чертеже) для выполнения указанной модификации может состоять из оптической головки или автоматической системы считывания, например, штрихового кода, Компьютер 3 затем резервирует одну из имеющихся платформ 5, которая в данный момент находится на определенном расстоянии от позиции погрузки 6 и предпринимает необходимые действия для передачи предмета на выбранную платформу. Блок синхронизации 2 получает только то назначение, которое позволяет оператору выполнять операции кодирования и помещать предмет на секцию А позиции 6 в периоды времени, определенные компьютером.Таким образом, предмет 1 переходит на секцию А (поз, 1 а), где он взвешивается и передается в сторону секции В с постоянной скоростью Чо, имеющей, например, значение 1 м/с. На указанном пути он проходит мимо барьера 7(позиция 16), образованного серией датчиков 8 (например, фотоэлемен тов), способных детектировать размеры предмета и его положение на ременном конвейере позиции погрузки. Эти данные размера и топологии сообщаются компьютеру 3, а детектируются они следующим образом:- максимальное число затененных элементов и время, в течение которого, по меньшей мере, одна ячейка остается затененной (причем Чо - постоянна и известна) обеспечивают два размера предмета:- положение затененных ячеек обеспечивает топологические данные. Предмет 1 подходит со скоростью Чо к мнимой линии Х, Укаэанная линия называется мнимой потому, что она установлена в памяти компьютера 3 на расстоянии от барьера 7 большем, чем диагональ предмета, имеющего максимально допустимые сортировочным пунктом размеры. Таким образом, определено, что когда предмет достигает линии Х, он полностью освобождает барьер 7,В тот момент, когда предмет достигает линии Х (позиция 1 с), скорость ременного конвейера секции В доводится компьютером до значения Ч / П (например, 1,7 м/с) и предмет переходит на секцию 6, где ремень движется с той же скоростью Ч( чГ (где % - скорость движения платформы) и подходит к второй линии У (позиция 1 о), положение которой, как лучше иллюстриру 5 2004479ется ниже, определяется компьютером в соответствии с импульсами, приходящими откодирующего устройства 9, подключенногов сортировочной машине. Затем скорость.ремня секций С повышается до значенияЧ /Ги предмет (позиция 1 е) погружается на выбранную платформу).Как уже указано, цель этого способа -достичь погрузки предмета точно в центрплатформы, зарезервированной компьютером. В этом случае скорость Чп,/ /2 является определяющей, так же как момент, вкоторый происходит переключение с этойскорости на скорость Ч/ /ТПредмет 1 может обнаружить линию Х влюбом положении на ремне погрузочнойпозиции, При погрузке (позиция 1 е) зарезервированная платформа находится в таком положении, что середина 10 еепогрузочной стороны соответствует направлению подачи предмета на погрузочной позиции, С этой целью положение предметакомпенсируется значением скорости Чт/Л за период времени, который постояненот линии Х до начала секции С и перемещенот этой точки до линии У,Чтобы лучше пояснить эту позицию. достаточно рассмотреть, что предмет можетнаходиться на ременном конвейере погрузочной позиции в любом положении от правого края к левому краю указанного ремня.Чтобы всегда получать погрузку в центрезарезервированной платформы, последняядолжна быть в положении, соответствующем положению предмета в момент погрузки, Другими словами, необходимосинхронизировать положение платформы,которая должна принять предмет с направ-,лением подачи указанного предмета в позицию погрузки так, что середина указаннойплатформы при погрузке лежала на указанном направлении подачи.Поэтому необходимо компенсироватьположение предмета на ремне путем придания ему на определенный период временисоответствующей скорости.На фиг, 2 графически показано, почемууказанная скорость имеет значение Чп/ П, Чтобы скомпенсировать расстояние ОС =Ч 1, покрываемое платформой за время т,. изменяемое в соответствии с положениемпредмета на ремне, необходимо, чтобыпредмет прошел расстояние ВС = Чп/ Л ,поскольку треугольник СОЕ прямоугольныйс углами при основании 45 (заметим, чтопозиция разгрузки установлена, в частности, под углом 45).Фактически сторона ЕС = ЕО представ ОС= Е +ЕОоткудаВ--(1)ба члена соотношения (1) делим на с, полчим компенсирующую скоростьЕ/т-Че/ /2,С практической точки зрения такая коменсация может выполняться, например,=2 Е 0 следующим образом. Фотоэлементы барь 25 0 35 40 45 ра 7, которые детектируют положение предмета 1, могут быть установлены так, чтобы шаг между двумя последовательными фотоэлементами был равен времени между двумя импульсами кодирующего устройства 9, помноженному на скорость платфор мы (шаг кодирующего устройства). В определенных случаях шаг фотоэлементов может быть выражен либо произведением, либо дробной частью шага кодирующего устройства. В этом случае следует прибегнуть к константе, которая представляет либо множитель, либо делитель шага кодирующего устройства относящий его к шагу фотоэлементов.Таким образом, компьютер 3 может сравнивать положение предмета на погрузочном ремне с положением зарезервированной платформы и удерживать скорость Ч / А в течение приемлемого периода времени, пока не будет достигнута линия У. Линию У можно определить как фокус точек, расстояние которых от начала секции равно числу импульсов кодирующего устройства 9, соответствующему затемненным фотоэлементом 8.Описанный способ иллюстрируется графически на фиг. 3, где показано изменение скорости во времени.До момента и предмет движется с постоянной скоростью Чо с возможной паузой тг - т на устройстве синхронизации 2, во время которой выполняется кодирование. В интервале Ь - 14 (являющемся постоянным, поскольку он соответствует расстоянию между линий Х и началом секции 3) скорость имеетзначение Чп/ Л, интервал тб-б, где скорость все еще Чп/ Ч 2, напротив переменный, поскольку он зависит от положения предмета на ремне (например, для другого положения предмета он может быть равен 17 - Ь, далее от момента 16 до момента св (соответствующего погрузке на платформу) скорость имеет значение ЧАЗагрузка платформы. В этот момент предмет 1 переходит на платформу с направлением, отличным от направления движения платформы, и требуется, чтобы часть кинетической энергии, определяемой скоростью перехода, была погашена, 2004479Предмет 1 переходит на платформу 5 при скорости ЧЧ 2 (фиг, 4),Поскольку направление указанной скорости образует по отношению к направлению движения платформы угол 45, можно разделить Чл 1 /Г на две составляющие Чп;2 и Чп 11 соответственно, параллельную и перпендикулярную перемещению платформы, имеющие модуль, равный Чп 1. Что касается этого, можно указать, что уже упомянутый патент Хольцзаузера раскрывает переход предмета на ременный конвейер при этой скорости, чтобы иметь компоненту векторно равную скорости конвейера, причем другая компонента получается как следствие.Наоборот, в настоящем способе раскрывается, что переход предмета на платформу происходит при общей нулевой относительной скорости. Фактически, как поясняется ниже, погрузочный ременный конвейер платформы во время перехода приводится в движение со скоростью равной чп 1, таким образом, предмет переходит на платформу со скоростью Чп Г, и следовательно, с составляющими Ч п 2 и Чп 11, тогда как платформа движется со скоростью Чп = =Ч 2, а ее погрузочный ременный конвейер со скоростью Чп 11, Следовательно, общая относительная скорость предмета во время фазы его перехода на платформу равна нулю,Компонента Чп,2 не вызывает никаких отрицательных последствий для фазы перехода, а компонента Ч 1, создает кинетическую энергию Е = 1/21 Ч и, которая должна быть погашена.Следующей целью настоящего способа является управляемое поглощение указанной кинетической энергии, позволяющее принимать в расчет массу гп сортируемого предмета,В данной области техники известно несколько способов устранения излишней части кинетической энергии, однако, выполняя свою задачу, они вызывают некоторые неудобства, поскольку кинетическая энергия, зависящая от массы предмета, которая, как известно, неодинакова, для всех сортируемых предметов, не принимается во внимание,Один иэ этих способов поглощающего типа представляет оборудование платформы погрузочными поверхностями с высоким коэффициентом трения и/или оборудование их, в частности, выступающими элементами, Дело заключается в том. чтобы преобразовать бесполезную энергию в теп 5 10 15 20 25 30 35 40 45 50 55 ло посредством трения. создаваемого между предметом и поверхностью платформыили конвейерного ремня,Основными недостатками при использовании указанного способа являются непредсказуемое оконечное положениепредмета на платформе и наклон предметов, имеющих высокий центр тяжести.Следующий способ раскрывает применение совместно с поверхностями, имеющими приемлемое сцепление,механических барьеров, о которые предметы ударяются и часто отскакивают на платформе. Кроме того, в этом случаеотмечаются некоторые неудобства, окончательное положение предметов, особеннонебольших, непредсказуемо, предметы,имеющие большие размеры, могут устанавливаться между платформами, возможноприменение ограничительных краев, что нерешает проблемы полностью, так как этоможет вызвать механические воздействия,хрупкие предметы могут быть поврежденыот удара,Короче говоря, известные способы выполняют погрузку баллистического типа вущерб максимальной точности, требуемой всортировочных пунктах, чтобы избежать напрасной траты денег, например, из-за ошибок сортировки и применения сборниковбольших размеров.Чтобы устранить излишнюю кинетическую. энергию, настоящий способ предусматривает решение поглощающего типа, ноуправляемое.Когда предмет переходит на платформу,ремень платформы движения со скоростью,равной компоненте ЧП 1. Это управление создается центральным компьютером и позволяет предотвратить опрокидываниепереходящего предмета, С этого моментаремень платформы замедляется в соответствии со спадом замедления, управляемымопределенным устройством управленияприводом. описанным ниже. Следовательно, поглощаемая кинематическая энергияи реобра зуется противодействием устройства управления движению ремня, а замедление управляемое, так как системаавтоматически компенсирует изменение кинетической энергии предметов, имеющихразличные массы.Достоинства, достигнутые при указанном решении, заключаются в том, что устраняются удары, наклон и соскальзываниепредметов, хрупкие предметы обрабатываются осторожно (п редмет переходит с одного движущегося ремня на другой, причемдвижение обоих ремней одинаково) дости 2004479 10гэется предсказуемое и постоянное положение предметов на платформе и, следовательно, точность этапов сортировки,На фиг, 5 показан график модуля скорости предмета в период времени, начиная от 5момента та, в который предмет начинаетсвой переход на платформу. Предмет удерживаетскорость Ч Ч 2 (переход при нулевой общей относительной скорости) наопределенном интервале с 9 - 1 в, так чтобы 1 Опогрузиться на платформу большой своейчастью, интервал т 1 о - 9 определяется устройством управления приводом, регулирующим замедление ремня платформы взависимости от массы предмета. 15На фиг, 6 показано, как можно достичьуправляемого поглощения путем воздействия на питание двигателя, создающего движение ремня платформы. Этообеспечивается путем сравнения напряжения питания указанного двигателя с сигналом, приходящим от генераторапилообразного сигнала, причем этот сигналуправляется центральным компьютером взависимости от массы переходящего предмета. Таким образом, возможно воздействовать на напряжение питания двигателяремня платформы так, чтобы получить замедление, соответствующее положениюпредмета в центре платформы, и управлять 30количеством энергии, которое должно бытьпоглощено.Двигатель 11 ремня 12 платформы питается от шин 13, а напряжение управляетсяустройством управления привода 14. Устройство обратной связи 15 детектирует напряжение якоря двигателя 11 иподает его кузлу 16, который сравнивает это напряжение с сигналом, приходящим от генераторапилы 17. Этот сигнал имеет такой вид, апределяемый компьютером 3, в зависимости отмассы предмета, чтобы получить замедление, кэк показано на рис. 5 (Ио - с 9), Наоснове этого сравнения узел 16 воздействует на усилитель 18, чтобы получить напряжение на шинах 13 с изменяемым значением,соответствующим сигналу генератора пилы,Правильное соответствие между скоростьюдвигателя 11, который приводит в действиеремень 12 от скорости Чп 1 до окончательного значения, равного нулю, и напряжениемпитания в зависимости от скорости двигателя. достигается с помощью устройства обратной связи 15. Устройство управленияприводом может быть расположено либо на 55платформе, либо на основании, С конструктивной точки зрения наилучшие результатыполучаются при двигателях привода ремнейплатформы, имеющих хорошие характеристики ускорения и замедления; таких кэк, например, двигателя постоянного тока с постоянными магнитами.Эквалайзер для двигателей привода. Сортировочный пункт, использующий настоящий способ, содержит цепочку платформ, которые могут обрабатываться различными системами, известными в данной области, такими, как приводные ремни, устройства привода. установленные вдоль пути, двигатели, установленные на самих платформах. В последнем случае могут возникнуть две ситуации: либо все платформы имеют двигатели, либо двигателями снабжены только некоторые из платформ, причем остальные приводятся в действие группами с помощью указанных устройств привода.Выбор определенного типа привода зависит от нескольких факторов, особенно от вида сортировочной трассы. Когда путь прямолинеен можно удобно воспользоваться системой ременного привода. тогда как при карусельном пути с кривыми склонами выбор двигателя на платформе может упростить конструкцию пункта и обеспечить лучшие характеристики, особенно если используются двигатели постоянного тока с постоянными магнитами.Таким образом, решение с двигателем на платформе становится более предпочтительным и частым. когда желаютограничить длину трассы конвейера или приспособить установку к ранее существующему окружению.Однако такое решение имеет тот недостаток, что различные двигатели привода имеют различные токи потребления. Фактически даже при использовании двигателей одного типа потребляемый ток для всех используемых двигателей неодинаков, Таким образом, оказывается, что двигатели, которые потребляют больший ток, могут подвергаться нагрузкам, которые сокращают их срок службы и отрицательно влияют на надежность работы сортировочного пункта.По силовым шинам, которые питают приводные двигатели, протекает ток, среднее значение которого равна произведению номинального тока одного из указанных двигателей на число используемых двигателей, Оказывается также, что двигатели платформы, перемещающихся под уклон, потребляют ток меньший номинального(поскольку они выполняют меньшую работу) и это количество непотребленного тока распределяется среди других двигателей, в частности тех, которые потребляют свой номинальный ток (например, двигателей платформы, идущих в горку), Указанное ко 20044795 10 15 20 25 30 35 40 45 50 55 личество может представлять такое увеличение тока, которое способно создать нежелательные тепловые и электрические толчки, а также вызвать размагничивание магнитов двигателей постоянного тока.Для преодоления этого недостатка и достижения точности и надежности работы сортировочного пункта предлагаемый способ предусматоивает как дальнейшую цель - обеспечение правильного рабочего тока дл я каждого дв и гател я.Устройство управления током, поглощаемым каждым двигателем, уменьшает его в том случае, когда он выше номинального .значения для двигателя. Эта функция регулирования выполняется устройством эквалайзера, подключенным к двигателю и раскрытым на фиг. 7.Двигатель привода 19 получают питание по силовым шинам 20, установленным параллельно сортировочной трассе. через эквалайзер 21, Указанное устройство состоит из переменного резистора 22, усилителя 23 и шунта 24 и калибруется так, чтобы ток 1, который проходит через двигатель 19, не превышал его номинального значения. За счет прохождения токана концах шунта 24 имеется напряжение, которое подается в усилитель 23, действующий на переменный резистор 22, который ограничивает значение тока. Таким образом, когда ток превышает номинальные значения для двигателя 13, величина сопротивления 22 возрастает, поддерживая ток в пределах разумных границ.Повторная центровка предмета на платформе. Таким образом, предметы переносятся с платформы в позиции разгрузки, где они разгружаются в соответствующие сборники в соответствии с их кодировкой. Хотя раскрываемый способ обеспечивает точную погрузку предметов в центре платформы, может случиться, что при переносе некоторые предметы сдвинуты и придут к разгрузочным устройствам в положении отличном от положения, в котором они были на погрузке, Это большей частью происходит тогда, когда, предмет имеет высокий центр тяжести и когда при его переносе он падает на свою наибольшую поверхность.Такое изменение положения предмета нарушает точность погрузки, обеспечиваемую предлагаемым способом, и должно быть преодолено.Следующая цепь предлагаемого способа относится к системе повторной центровки тех предметов, которые на этапе разгрузки не находятся более в первоначальном положении. Не всегда возможно перевести предмет в центр платформы, однако благодаря повторной центровке предмет может быть перемещен в более приемлемое положение, чтобы получить предсказуемую и постоянную траекторию разгрузки. Предметы, имеющие размеры, аналогичные размерам платформы, можно с большой степенью приближения считать находящимися в центре платформы, В этом случае повторная центровка важна для того, чтобы избежать вы падания предмета с платформы, когда та подходит к разгрузочному устройству. Предметы малых размеров наоборот могут подходить к разгрузочным устройствам в смещенном от центра положении. В этом случае повторная центровка позволяет помещать их в положение по возможности в центре,Обратимся к фиг. 8, Система повторной центровки состоит из двух групп 25. 26 фотоэлементов 27. 28. Указанные элементы, смежные и параллельные сортировочному пути, расположены неподалеку от позиции разгрузки. Когда предмет 1 изменяет свое положения на платформе, он пересекает какую-либо из двух групп 25, 26 фотоэлементов, а затем посредством движущегося ремня платформы перемещается обратно по возможности в центр (положение 1). Ремень приводится в движение в направлении стрелки до тех пор, пока не останется более затемненных элементов 28 или пока не затемнится один из фотоэлементов 27. Фотоэлементы 27, 28 поделены на две последовательные группы, Первая группа 26 и 25 проверяет изменение предмета на платформе, а вторая гр,ппа 26" и 25" подтверждает то, что пооверила первая группа, Не получив такого подтверждения, повторная центровка не производится, В самом деле, может оказаться, что фотоэлементы первой группы не работают или грязные и, следовательно, сигнал не соответствует реальной ситуации. Такая последовательность проверки и подтверждения проверки позволяет избежать ошибок повторной центровки,На фиг, 9 можно отметить, что повторная центровка предмета 1 происходит благодаря компьютеру 3, который будучи информирован фотоэлементами 28 о неправильном положении предмета, подает напряжение на шины 13 и приводит в действие двигатель 11 ремня платформы 12, Таким образом, предмет 1 сдвигается в направлении стрелки, занимая положение 1,На фиг. 10 показана иная повторная центровка, фактически решение, указанное на фиг, 9, не позволяет проверить положение предметов, которые не выступают с13 2004479 14 45 50 55 платформ, хотя и находятся не в центре,Повторная центровка на фиг. 10 обеспечивает схождение лучей фотоэлементов 28 и27.Таким образом, предмет 1, будучи, например, малых размеров, находясь не в центре и не выступая за края платформы, такжеможет быть повторно отцентрован в соответствии с вышеуказанным критерием. Поэтому в зависимости от средних размеров 10сортируемых предметов можно выбрать одно из решений указанных фиг. 9 и фиг. 10.На месте фотоэлементов могут быть использованы другие устройства, не показан- .ные на фигурах, например лазерный сканнер, 15который детектирует положение предметасверху, или другие типы датчиков,Блок-схемы операций. Фиг. 11 - 13 изображают блок-схемы, относящиеся к главнымфункциям, выполняемым сортировочным 20пунктом, и объекту настоящего способа.Фиг. 11 касается основных функций настоящего способа, именно последовательности погрузки 29, перецентровки 30 ивыгрузки 31 сортируемых предметов и испытания 32 для проверки правильной работы ремней узлов (блоков).Схема автоматического кодирования 33показывает, что можно обходиться без операций кодирования путем установки автоматического устройства считывания кода(например, почтовый код, штриховой код)дозоны разгрузки, Это дает возможность считывающему устройству автоматически сканировать назначение предметов и будет 35обеспечивать центральный компьютер необходимыми данными для разгрузки. Фиг.12 касается фазы повторного центрирования поедметов перед разгрузкой,40 Формула изобретения 1. СПОСОБ УПРАВЛЕНИЯ ТОЧНЫМ ПОЛОЖЕНИЕМ ПРЕДМЕТОВ, СОРТИРУЕМЫХ НА АВТОМАТИЧЕСКОМ СОРТИРОВОЧНОМ ПУНКТЕ, включающий в себя стадию помещения предметов на загрузочное средство, соСтоящее из множества вращающихся погрузочных ремней, расположенных последовательно друг за другом и установленных под углом 45 к направлению перемещения множества несущих платформ, и стадию передачи предметов на несущие платформы за счет вращения погрузочных ремней со скоростью компоНачиная с основного шифратора 34, который управляет движением блока (узла), производится первая проверка в отношении нецентрированного положения предмета, и затем вторая проверка (шифратор 35), которая подтверждает первую. Ремень узла (блока) 36 приводится в действие, если требуется повторное центрирование, и операция закончена.Фиг. 13 касается функций, выполняемых во время стадии загрузки. Основной шифратор дает возможность знать положение узла (блока) и схема "присутствия оператора" возбуждается через управление скоростью узла (блока).Данные о предмете (адрес, п-.чтовый код) кодирование оператором, вводятся в компьютер и передаются каждый раз на последующие устройства. Данные о предмете достигают таким образом зоны синхронизированного ремня, где блок (узел) резервируется после обращения к регистру данных сортируемого предмета.Предмет проходит в секцию А индукционного пункта, где детектируется позиция и размер и затем в секцию В (компенсационный ремень) где он взвешивается, Затем предмет поступает в секцию С(индукционный ремень) для загрузки на резервированный блок(узел), В момент загрузки ремень блока (узла) движется чтобы принять предмет, в то время как данные о предмете записываются на сдвиговом регистре(также как сказано ранее в отношении резервирования блока/узла) и затем загружается в память.(56) Патент США М 4429784, кл. В 65 О47/68, 1984,Патент Италии М 22476, кл. А/83, 1983. ненты, направленной в сторону движения несущих платформ и равной скорости последних, отличающийся тем, что предметы перемещают на несущие платформы за счет поперечно установленных на них вращающихся от двигателя с регулируемой скоростью ремней, причем последние приводят во вращение в момент подачи на них предмета со скоростью, равной скорости движения погрузочных ремней загрузочного средства, и направляют поперек по отношению к направлению движения несущих платформ.2. Способ по п.1, отличающийся тем, что скорость вращения ремней замедляютпосле помещения предметов на рамки несущих платформ,3. Способ по п,2, отличающийся тем, что массу каждого предмета определяют, как только предмет помещен на загрузочное средство, с генерированием соответствующего сигнала и затем питающее напряжение двигателя, приводящего в движение ремни, несущих платформ сравнивают с этим сигналом. 4. Способ по п.1 отличающийся тем,что размеры и положение каждого предмета определяют детектируют), как только этот предмет помещен на загрузочное средство, чтобы произвести коррекцию скорости загрузочного средства для обеспечения правильной загрузки предмета точно относительно центра несущей платформы,
СмотретьЗаявка
04614263, 22.05.1989
Франческо Канциани
МПК / Метки
МПК: B65G 47/02
Метки: автоматическом, положением, предметов, пункте, сортировочном, сортируемых, точным
Опубликовано: 15.12.1993
Код ссылки
<a href="https://patents.su/13-2004479-sposob-upravleniya-tochnym-polozheniem-predmetov-sortiruemykh-na-avtomaticheskom-sortirovochnom-punkte.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления точным положением предметов, сортируемых на автоматическом сортировочном пункте</a>
Устройсство для управления скоростью и положением станка

Номер патента: 515474
Опубликовано: 25.05.1976
МПК: G05B 19/16, G05B 19/416
Метки: положением, скоростью, станка, устройсство
...скоростью двигателя10, который регулирует текущий сигналположения,Для получения высоких скоростей обработки необходимо иметь высокий сигналпогрешности Я, но это может привести кнеточностям в обработке. Для устранения этого имеется еше один цифро-аналоговый преобразователь бв который поступает цифро. 30вая информация из регистра скорости 12 икоторый вырабатывает моделирующий сигнал,пропорциональный запрограммированной скорости обработки. Сигнал Е из преобразователя 6 складывается сумматором 8 с сиг 35налом погрешности Е и подается к двигателю 10. Таким образом можно достигнутьвысоких скоростей перемещения при большейточности обработки, а также производитьработу с небольшим сигналом погрешности 40Я , во всяком случае меньшим,...
Цифровой измеритель скорости и соотношения скоростей вращения

Номер патента: 857879
Опубликовано: 23.08.1981
Авторы: Гунченков, Денищенко, Стремлин
МПК: G01P 3/60
Метки: вращения, измеритель, скоростей, скорости, соотношения, цифровой
...схему ИЛИ 5 на прямой вход триггера 6, переводит его из состояния О в состояние 1. При этом положительный потенциал с прямого выхода триггера 6 открывает схемы И 7, 22, проходит через открытую схему И 15 на первый вход установки блока 16 индикации. С приходом очередного импульса с датчика 1 счетчик 3 начинает второй цикл счета. При приходе ближайшего, после окончания первого цикла счета счетчиком 3, импульса сравниваемой скорости, который проходит с выхода схемы И 18 через схемы И 14; ИЛИ 13, И 7 на прямой вход триггера 8, триггер 8 из состояния О переходит в состояние 1, на его инверсном выходе появляется потенциал, равный нулю, что приводит к закрытию схем И 2, 18 н прекращению работы счетчиков 3, 19, а положи10 20 Формула изобретения...
Устройство для определения положения драги в забое и контролирования скорости ее перемещения

Номер патента: 221597
Опубликовано: 01.01.1968
МПК: E02F 3/16
Метки: драги, забое, контролирования, перемещения, положения, скорости
...и один из крайних. При уходе светового пятна со среднего фотоэлемента установка отключге 1 ся, и подается световой сигнал. Для точной установки светового пятна 15 на стекле объектива 3 очерчена граница. просматриваемая средним фотоэлементом. После установки светового пятна задатчик 7 устанавливает скорость бокового перемещения драги, а стрелка указателя поворота драги устанав лпвается на нуль. На этом подготовка устройства к работе заканчивается.Одновремснно включается двигатель о носовой лебедки и двигатель 8 фотоголовки. Фото- головка вращается в направлении противопо ложном направлению вращения драги с постоянной заданной скоростью.Если скорость бокового перемещения драгиравна заданной, то она равна и скорости вращения...
Способ контроля положения, скорости и ускорения станины при контактной стыковой сварке

Номер патента: 766788
Опубликовано: 30.09.1980
Авторы: Иванов, Кабанов, Лабадзе
МПК: B23K 11/04
Метки: контактной, положения, сварке, скорости, станины, стыковой, ускорения
...промежуток времени, кратный пропыленной частоте (например, за полупе. 65 на фиг. 3 - блок-схема конкретного примера осуществления способа.Графики зависимостей (см.фиг. 2) были получены при проведении экспериментов На лабораторной стыкосварочной машине типа Л.Очевидно, что для каждой машины эти зависимости будут разными, но характер кривых не изменится.Способ заключается в следующем.При перемещении подвижной станины плотность силовых линий магнитного поля по мере приближения к неподвижной станине возрастаетПоскольку датчики магнитной индукции, например датчики Холла, расположены по обе стороны от шины неподвижной станины вдоль направления движения, то в них наводятся различные поля так, как число силовых линий, пересекающих два...
Устройство бесконтактного контроля положения, скорости и ускорения подвижной станины машины для контактной стыковой сварки

Номер патента: 859078
Опубликовано: 30.08.1981
Авторы: Иванов, Кабанов, Лабадзе, Розен
МПК: B23K 11/04
Метки: бесконтактного, контактной, подвижной, положения, сварки, скорости, станины, стыковой, ускорения
...точности контроля, эа счет исключениязависимости показаний устройства отвеличины тока,Поставленная цель достигаетсятем, что в устройство введены блокиделения и логарифмирования, причемвыходы интеграторов соединены сблоком деления, а его выход подключен ко входу блока логарифмирования,выход которого подсоединен к первомуиэ двух последовательно соединенныхдифференцирующих элементов, а управляющий вход блока логарифмированиясоединен с выходом блока управления,На Фиг.1 представлена блок-схемаустройства контроля положения, скорости и,ускорения; на фиг.2распОложение преобразователей магнит-ного йоля, датчиков Холла на шиненеподвижной станины и распределениесиловых линий векторов магнитнойиндукции.Устройство содержит два преобразователя 1 и...
Предыдущий патент: Устройство для очистки ленты конвейера
Следующий патент: Устройство для накопления длинномерных изделий
Случайный патент: Трехфазная полюсопереключаемая обмотка