Система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
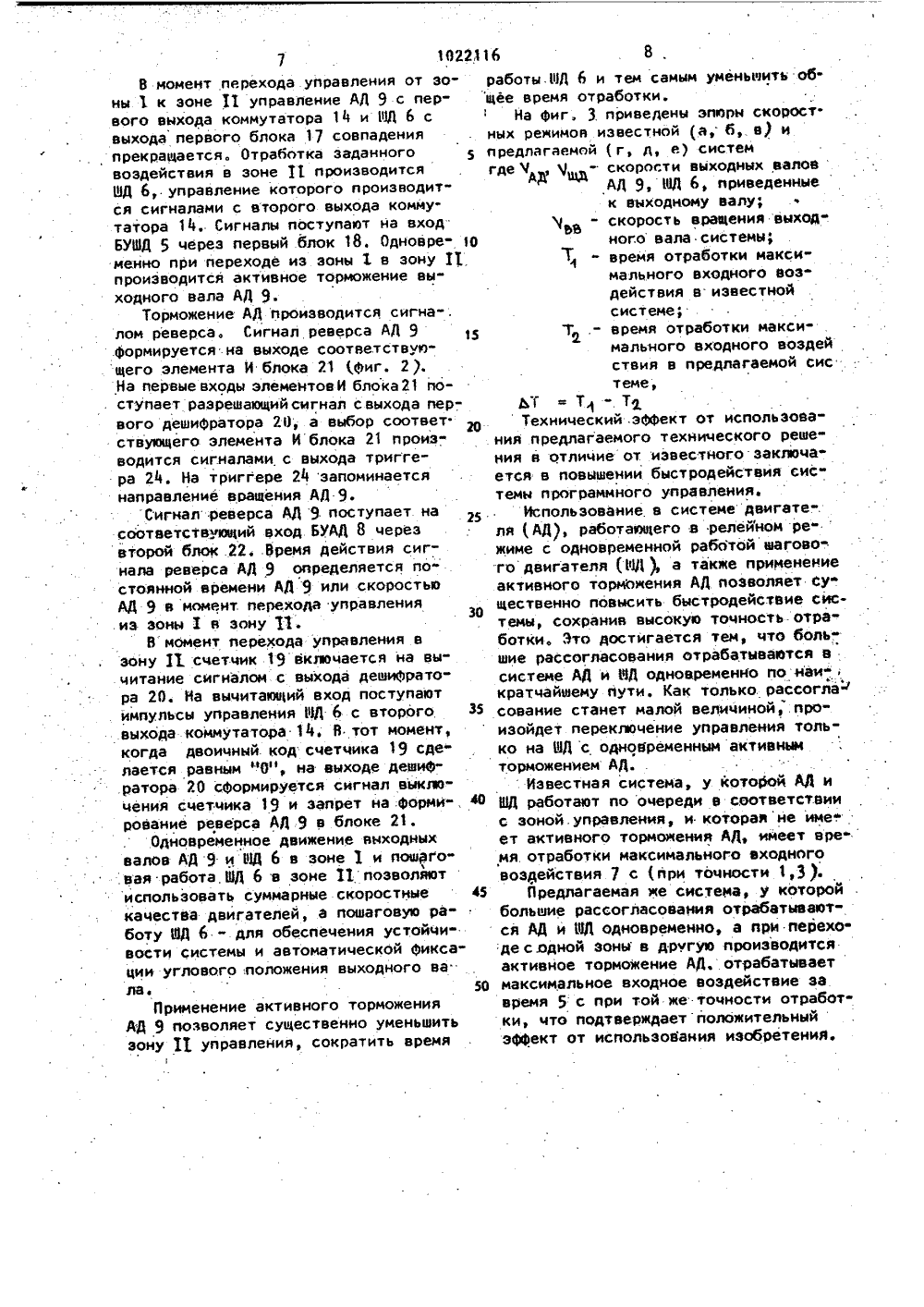
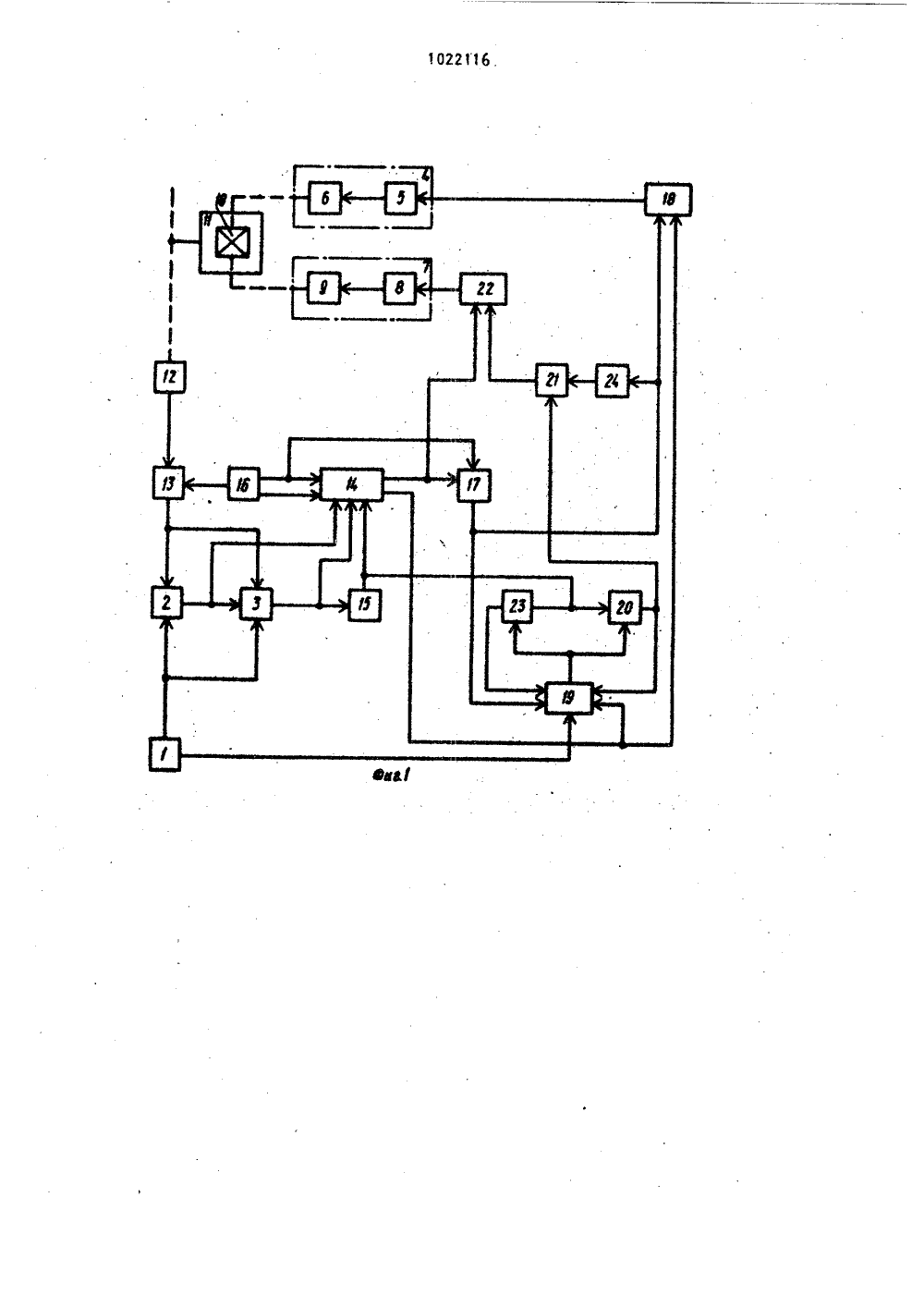
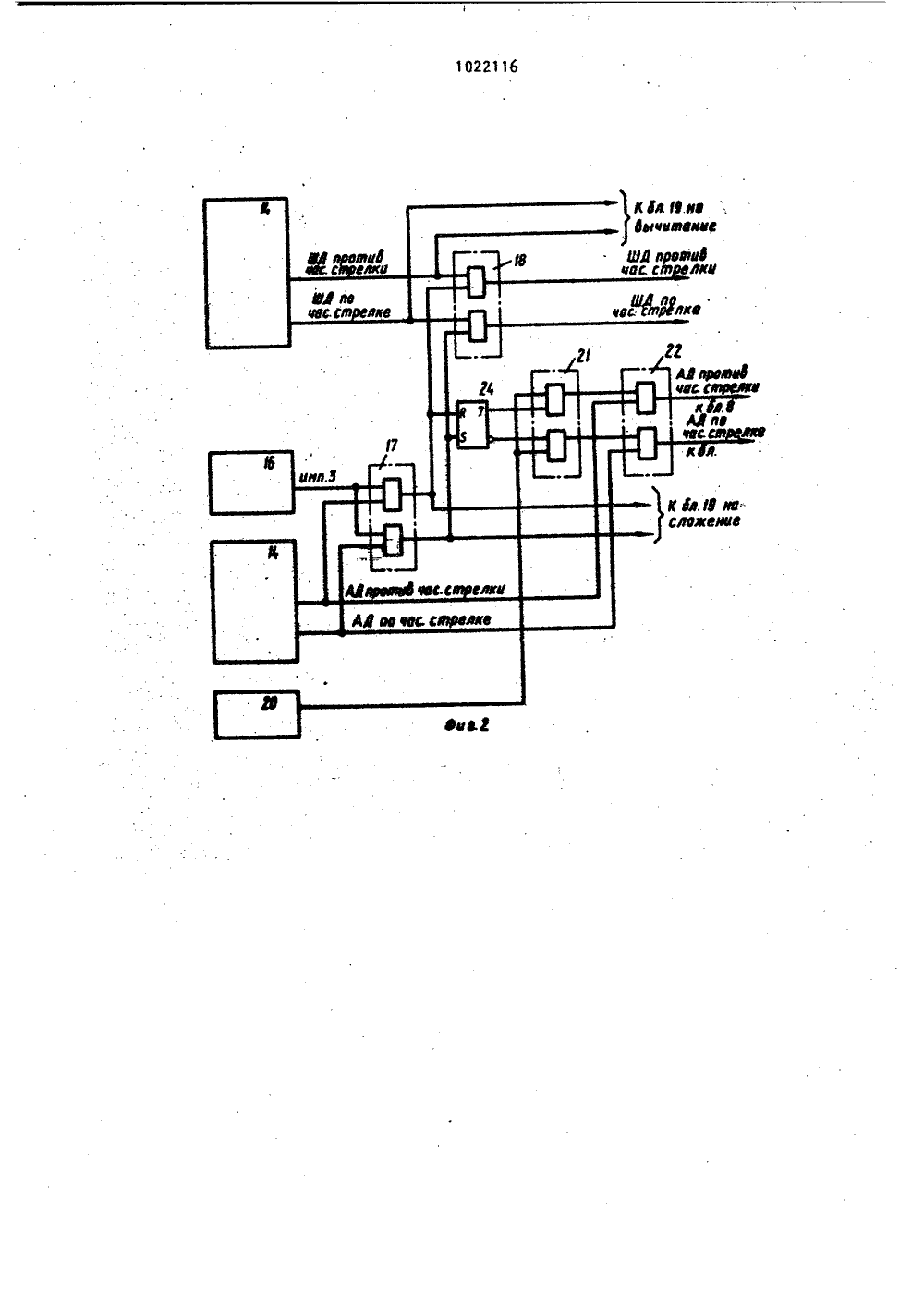
,.ЯО 4019 6 О БРЕТЕ Е ИЗО Я ВЕЬЖЙ 0 : фА ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И,ОТНРЫТИЙ(56) 1. Авторское свидетельство СССР . У 306769, кл. С 01 3 9/02, 1969.2. Авторское свидетельство СССР И 894679., кл. 0 05 В .19/19, 6 05 В 19/40, 1979 (прототип). (54)(57) СИСтЕИА ПРОГРАиИНОГО УПРАВЛЕНИЯ, содержащая первый и второй приводы; кинематически связанные через диФФеренциал редуктора с выходом системы,.последовательно соеди ненные блок ввода программы, анализатор кодов, сумматор, первый преобразователь кода и коммутатор, вторь" ми входами подключенный к первым выходам синхронизатора, второй выход которого соединен с первым входом второго.преобразователя кода, вторым входом подключенного к выходу датчика угловыЬ перемещений, а.выходом - к второму входу анализатора кода и к второму входу сумматора, третий вход которого соединен с первым выходом блока ввода программ, а выход - с тре тьим входом коммутатора, четвертый вход которого подключен к выходу анализатора кода, о т л и ч а ю щ а я с я тем, что, с целью повыщения быстродействия системы, в нее введены триггер,.первый дещиФратор, первый блоксовпадения,.подключенный выходомчерез первый блок элементов ИЛИ к пер. вону приводу; первым входом - к пер" вому выходу синхронизатора, вторым входом " к первому выходу коммутатора и через второй блок элементов ИЛИ - к второму приводу, а также последовательно соединенные счетчик импульсов, второй дещиФратор и второй блок совпадения, выход которого соединен с вторым входом второго блока элементов ИЛИ, в.торой вход .второго блока совпадения через триггер подключен к выходу первого блока совпадения и к первому Е суммирующему входу счетчика импульсов второй суимируоций вход которого через первый дещиФратор подключен к первому входу второго дещифратора и к выходу первого преобразователя кода, первый Я вычитающий вход счетчика импульсов подключен к второму выходу коммутатора и к второму входу первого блока элементов ИЛИ, второй вычитающий вход счетчикаимпульсов подключен к выходу второго дещиФратора, установочный вход счетчика подключен к второму вы,ходу блока ввода программы, а выход " к. входу первого дещиФратора.ИПИ го комитета СССРий и открытийаушскэя наб. д, 4/евщеиюаеютт тиьщ 8 еееюУжгород, ул. ПроектВМШЕт 4.Пушненков НИ Госупо делам113035 Москвею йаевэй Лш шавжие илиал .ППП "Па СостдвиТехредуТираж 87арственнизобретеь Щ:31ент", г. ооректоо С. ШекмародписноеИзобретение относится к областиавтоматики и вычислительной техни"ки и может быть использовано, например,в системах контроля радиолокационных устройств.5Известна система программногоуправления, содержащая блок вводапрограммы, анализатор кодов, блокуправления шаговым двигателем, шаговый двигатель, датчик угловых перемещений, преобразователь кода, генератор опорного сигнала и синхронизатор 1,Недостатком этой системы являетсянизкое быстродействие.35Наиболее близкой по назнечениюи технической сущности к изобретениюявляется система программного управления, которая содержит блок вводапрограммы, анализатор кодов, первый 0(шэговый ) привод, включающий в себяблок управления шаговым двигателем(,БУИД) и шаговый двигатель (ИД),второй ( аналоговый) привод, включаю"щий в себя блок управления аналоговым двигателем (,БУАД) и аналоговыйдвигатель ( АД), редуктор с дифферен"циалом, датчик угловых перемещений,(ДУП ), первый и второй преобразователи кодов, коммутатор и синхрониза" З 0тор. Известное устройство работает следующим образом,По кодовой команде от блока ввода 35 программы БУАД и БУВД управляют соответственно вращением АД и ЩД по зонам, устанавливая через редуктор нагрузку в угловое положение, соответствующее кодовой команде, с последу ющей автоматической фиксацией положения этой нагрузки. Программная информация от блока ввода программы поступает на первые входы анализатора кодов и сумматора. Текущая информация 45 об угловом положении нагрузки снимается в виде цифрового кода с ДУП и поступает на вторые входы анализатора кодов и сумматора через первый пре образователь кодов. Работа последнего синхронизируется первым импульсным сигналом синхронизатора.На выходе сумматора формируется двоичный код, равный разности програм. мы и текущего значения кода углового55 положения нагрузки, а на выходе анализатора Формируется знак разности кодов программы и текущего положения нагрузки. Код разности с выхода сум -матора поступает на вход второго преобразователя кода, где Формируются сигналы эоны управления. Сигнал зоны управления, старший. разряд кода разности и знак разности поступают на соответствующие,входы коммутатора, В зависимости от зоны управления и величины разности кодов коммутатор Формирует сигналы управления АД или ШД. При больших рассогласованиях отработка производится АД, при малых - ЯД 1 Р 3Известная система программного управления обеспечивает высокую точность обработки входного сигнала, однако быстродействие ее недостаточно.Целью изобретения является повышение быстродействия системы программного управления при сохранении высокой точности отработки входного сигна ла.Поставленная цель достигается тем, что в систему программного управления, содержащую первый и второй приводы, кинематически связанные через диФФеренциэл редуктора с выходом системы, последовательно соединенные блок ввода программы, анализатор кодов, сумматор, первый преобразователь кода и коммутатор, вторыми входамиподключенный к первым выходам синхронизатора, второй выход которого соединен с первым входом второго преобразователя кода, вторым входом подключенного к выходу датчика угловых перемещений, а выходом - к второму входу анализатора кода и к второму входу сумматора, третий вход которого соединен с первым выходом блока ввода программ, а выход - с третьим входом коммутатора, четвертый вход которого подключен к выходу анализатора кода, введены триггер, первый дешифратор, первый блок совпадения, подключенный выходом через первый блок элементов ИЛИ к первому приводу, первым входомк первому выходу синхронизатора, вторым входом - к первому выходу коммута. тора и через второй блок элементов ИЛИ - к второму приводу; а также последовательно соединенные счетчик импульсов, второй дешифратор и второй блок совпадения, выход которого соединен с вторым входом второго блока элементов ИЛИ, второй вход второго блока совпэдения через триггер подключен к выходу первого блока совпадения к первОму суммирующему входу счетчика1022116 3 аВ сумматоре определяется абсолют- уА- скорости АД 9 и ЙД 6, приАД шДная величина разности С веденные соответственно к вылС щ А"В ходному валу системы;Абсолютная величина С лежит в пре" 12 - частота работы ЯД 6. делах 5 Укаэанная расстановка импульсных0 а Сщ 16 ээ сигналов необходима для разделения14-разрядный код С а выхода сумма" во времени работы первого преобразотора 3 поступает на вход второго пре- вателя 13 кода, коммутатора 14 и пер. образователя 15 кодов. 14-й старший вого блока 17 совпадения. разряд кода С поступает на второй 10 . Рассмотрим, работу системы для слувход коммутатора 14. Диапазон измене- чая, когда величина С находится в диа"ния С разбит на две зоны управления пазоне чисел, соответствующих зоне 1Зона 1 32С16352 (,АД 9 в процессе отработки изменяетЗона 11 16352 % С с 32 скорость выходного вала от 0 до ноВ зоне 1 отработка заданного воз-., 15 минальной).действия производится АЛ 9 и ЩД 6 , Коммутатор 14 по первому выходуодновременно, в зоне 11 - ЙД 6. формирует сигнал. управления АД 9.ЭтотВыделение зон управления в диа- . ;сигнал по шине АД против часовойпазоне изменения С производится во .стрелки или по часовой стрелке ( фиг.2)втором преобразователе 15 кодов. 20 поступает через блок 22 на вход блоС выхода преобразователя 15 сигнал ка 8, Начинается управление АД 9 Одсоответствующей зоны поступает на ноаременно включается один из элетретий вход коммутатора 14 и иа вто- ментов И блока 17, Импульсы 3 синхро" .рые входы дешифраторов 20 и 23. На низатора 16 поступают на блок 17 и чепервои выходе коммутатора 14 форми. реэ соответствующий элемент И наруется сигнал управления АД 9, а на вход БУОД 5 через блок 18, Выходнойвтором выходе - сигнал управления вал ЙД 6 вращается в ту же сторону,ВД 6. что и АД 9. Триггер 24 устанавливаетВ зоне 1 включен второй деаифра- ся в положение, соответствующее натор 23, в зоне.11 - первый дешифра- правлению вращения вала АД 9. Импультор 20. На перЬые входы дешифраторов 20 сы с выхода блока 17 поступают на суми 23 подается двоичный код с выхода мирующий вход счетчика 19. Двоичныйсчетчика 19, Количество двоичных раз- код счетчика 19 может достигнуть знарядов счетчика 19 определяется по- чения, на которое настроен дешифрастоянной времени АД 9. Счетчик 19 тор 23, При этом с выхода дешифратоработает в период разгона АД 9 из со- ра 23 поступает на вход счетчика 1935стояния покоя до номинальных оборо- запрещающий потенциал, и счетный входтов выходного вала и во время тор- счетчика 19 на сложение закрывается.можения. Масштабом времени служат им"пульсы управлен я ВД 6Двоичный код счетчика пропорциоВыхо ной ф 23 40 нален времени разгона АД 9. При переыходнои сигнал дешифратора 2воздействует на суммирующий вход счет.ходе управления из зоны 1 к зонечика 19 а выхо,ной с а ф а- .дешифратор 23 сигналом второго преоб, а выходной сигнал дешифраРазователя кода 15 отключается. Тем" на вычитающий вход счетчи"ка 19.же сигналом дешифратор 20 включается.инхронизатор формирует на сво Дешифратор 20 реагирует на двоичныйих выходахнпачки" импульсов. На перкод счетчика 19, равный "0".Если код С имеет значение, соот"вом выходе они формируются с частотойработает в течение времени 1которое= 5,2 к ц,сдвинутые отноменьше ос оянной времени АД 9, тосительно йервого выхода на 2 мкс, На 50код счетчика 19 не достигает эначетретьем выходе - импульсы т= 330 Гц,ния кода, на который настроен дешифсдвинутые относительно второго выхо"да на 2 мкс. Частота= 5,28 кГцОтключение суммирующего входаобусловлена скоростью вращения выход"счетчика 19 произойдет по сигналуного вала системы смены зойы управления, который формируется на выходе второго преобразователя кода 15 и поступает на вторыегде ЧВ- скорость выходного вала; входы дешифраторов 20 и 23.1022116 . 8В момент перехода управления от зо" работы.йД 6 и тем самым уменьшить об.ны 1 к зоне П управление АД 9 с пер- щее время отработки.вого выхода коммутатора 14 и НД Ь сНа фиг, 3 приведены эпюрн скорост.выхода первого блока 17 совпадения . ных режимов известной (а, б в ипрекращается. Отработка заданного 5 предлагаемой ( г, д, е) системвоздействия в зоне Ц производится . где Ч , Ч - скорости выходных валовВД 6,. управление которого производитД ШДАД 9, ЮД 6, приведенныеся сигналами с второго выхода комму- к выходному валу;татора 14. Сигналы поступают на вход. Ч - скорость вращения выходБУШД 5 через первый блок 18. Одновре" 1 О ного вала системы;менно при переходе из зоны Ъ в зону П " время отработки максипроизводится активное торможение вы- мального входного возходного вала АД 9, действия в известнойТорможение АД производится сигна". системе;лом реверса. сигнал реверса АД 9 15 т .- время отработки максиформируется на выходе соответствуя- мального входного воздейщего элемента И блока 21 1 иг. 2 ). ствия в предлагаемой сисНа первые входы элементов И блока 21 по- теме,. ступает разрешающийсигнал свыхода пер- ЬТ = Т.1 - Тйвого дешифратора 20 а выбор соответ 2 ОТехнический .эффект от использова"ствующего элемента И блока 21 произ- ния предлагаемого технического решеводится сигналами с выхода тригге- ния в отличие от. известного заключара 24. На триггере 24 запоминается ется в повышении быстродействия сис"направление вращения АД 9. . темы программного управления,Сигнал реверса АД 9 поступает на 2 Использование в системе двигате-.соответствующий вход. БУАД 8 через ля 1,АД, работающего в релейном ре"второй блок 22. Время действия сиг" жиме с одновременной работой щаговонала реверса АД 9 определяется по" . го двигателя (шДа также применениестоянной времени АД 9 или скоростью активного торможения АД позволяет су"АД 9 в момент. перехода управления щественно повысить быстродействие сисиэ зоны 1 в зону Н.30темы, сохранив высокую точность отраВмомент перехода управления в ботки. Это достигается тем, что боль".зону 1 Е счетчик 19 включается на вы- шие рассогласования отрабатываются вчитание сигналом с выхода деаифрато- системе АД и ИД одновременно по иаира 20. Иа вычитающий вход поступают кратчайшему пути, Как только. рассоглаимпульсы управления НД 6 с второго З сование станет малой величиной; про"выхода коммутатора 14, В тот момент,изойдет переключение управлеемия толь"когда двоичный код счетчика 19 сде- ко на ВД с одновременным активнымлается равным "О", на выходе дешиф" торможением АД.ратора 20 сформируется сигнал выкло"Известная система, у которой АД ичеиия счетчика 19 и запрет на .Форми", 4 О ВД работают по очереди в соответствиирование реверса АД 9 в блоке 21. с зоной. управления, и котораяне име..Одновременное движение выходных ет активного тормоиения АД, имеет вревалов АД 9 и ОД 6 в зоне 1 и пошлого" мя. отработки максимального входного:вая работа ЙД 6 в зоне П позволяют воздействия 7 с (при точности 1,3 ).использовать суммарные скоростные 45 Предлагаемая же система, у которойкачества двигателей, а пошаговую ра- : большие рассогласования отрабатываютботу ВД 6 " для обеспечения устойчи- ся АД и ОД одновременно, а при переховости системы и автоматической фикса- :де с.одной зоны в другую производитсяции углового .положения выходного ва активное торможение АД. отрабатываетла. ЗО максимальное входное воздействие заПрименение активного торможения время 5 с при той же точности отработАД 9 позволяет существенно уменьшить ки, что подтверждает положительныйзону Ц управления, сократить время . эффект от использования изобретения.
СмотретьЗаявка
3400773, 02.03.1982
ПРЕДПРИЯТИЕ ПЯ А-7162
СВЕРДЛОВ ВЛАДИМИР ИСААКОВИЧ, ДАНИЛОВ АЛЕКСАНДР ДМИТРИЕВИЧ
МПК / Метки
МПК: G05B 19/19
Метки: программного
Опубликовано: 07.06.1983
Код ссылки
<a href="https://patents.su/11-1022116-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления</a>
Счетчик импульсов в р-кодах фибоначчи

Номер патента: 1443168
Опубликовано: 07.12.1988
МПК: H03K 23/40
Метки: импульсов, р-кодах, счетчик, фибоначчи
...р+1) - го,1.-1-3(р+1) -го, ,- 1-1;р+1)3 - горазрядов. Первые входы дополнительновведенных элементов И 7 этих разрядов объединены между собой и соединены с прямым выходом Р-триггера 4данного разряда, а их вторые входысоединены соответственно с инверсными выходами Р-триггеров х-(р+1)1 -го,-ш(р+1) 1-го разрядов,Предлагаемый счетчик при различныхр работает следующим образом .Фиг.4 -7 и табл. 1-4),При нулевых исходных состояниях Ртриггеров счетчиков (000000),когда кшинам тактирования Т поступает первыйимпульс, независимо от р, Р-триггерыих первых разрядов устанавливаютсяв единичные состояния (100000). Этосоответствует десятичному числу 1Второй тактовый импульс переключаетР-триггеры их нервых разрядов в нулевое состояние,. а Р-триггеры...
Счетчик импульсов в р-кодах фибоначчи

Номер патента: 1803974
Опубликовано: 23.03.1993
Автор: Арутюнян
МПК: H03K 23/40
Метки: импульсов, р-кодах, счетчик, фибоначчи
...входами элементов ИЛИ 2 (фиг. 1 - 3).К первому управляющему входу 4,1 первого разряда и к управляющим входам 4,2 - 4.Р+1 последнего разряда счетчика (фиг.1803974 К 1 4 4 - 6) прикладываются потенциалы логической единицы,Предлагаемый счетчик (например шестиразрядный) при различных значениях Р функционирует следующим образом.При нулевых исходных состояниях триггеров счетчиков (000000), когда к шинам тактирования поступает первый тактовый импульс, независимо от значения Р, триггеры их первых разрядов устанавливаются в единичные состояния (100000). Это соответствует десятичному числу 1.Второй тактовый импульс переключает триггеры первых разрядов счетчиков в нулевое состояние, а триггеры вторых разрядов - в единичные состояния...
Способ восстановления стереофонического цифрового сигнала, закодированного кодом, обнаруживающим блоки ошибок длительностью не более n символов

Номер патента: 1555884
Опубликовано: 07.04.1990
Авторы: Гитлиц, Добровольский, Зеленин, Попов, Худяков
МПК: H04H 5/00
Метки: блоки, более, восстановления, длительностью, закодированного, кодом, обнаруживающим, ошибок, сигнала, символов, стереофонического, цифрового
...Фронта сигнала на первом входе появляется через время, равное разности максимальной и фактической длительности блока ошибок.Кроме того, входной сигнал. поступает на первый (второй) блок 7 (8), в котором он задерживается на время максимальной длительности блока оши 55 бок, увеличенное на период следования кодовых слов, с выхода этого блока задержанный сигнал поступает как на первый информационный вход первого (второго) блока 11 (12), так и на вход третьего (четвертого) блока 9 (10).В третьем (четвертом) блоке 9 (10) задержанный сигнал дополнительно задерживается на время периода следования кодовых слов, С выхода третьего (четвертого) блока 9 (10) сигнал поступает на информационный вход первого (второго) блока 13 (14), на управляющий...
Устройство для подавления помех в дешифраторе кода снимаемого с двоичного счетчика

Номер патента: 518868
Опубликовано: 25.06.1976
МПК: H03M 13/49
Метки: двоичного, дешифраторе, кода, подавления, помех, снимаемого, счетчика
...нмн,чн,. г:; 1со счетным входом дион нино сч.т нн;.а, вьн:он 1.:формирователя имнульсон 1., ецнпнпч 1 нчс н нрт.".вь.евыходы 14, 15 первого разряда двоингого счетн:ка, 16, 17 второго разряда двоичного счетчика, нулеые выходы 18, 19 соответственно третьего и ч 1 нсрого разрядов двоичного счетчика и громежугочныйыход (выход числа "1") 20 дешифратора.Работа устройства пронсхолит следующим обраом,На сигнальные входы элементов ЗАПРЕТ 4, 51одаются задержанные в блоках 2,3 сигналы с выходов 14, 15 младшего разряда двоичного счетчика. Куправляющим входам элементов ЗАПРЕТ 4,5 по цп,не 13 подводятся сигналы с выхода формиропаз ела 1,сформированные из счетных импульсов. Времязадержки в блоках 2,3;выбирается таким, чтобыего величина,...
Устройство для контроля блоков оперативной памяти

Номер патента: 615546
Опубликовано: 15.07.1978
Авторы: Калиниченко, Лукьянович, Пронина
МПК: G11C 29/00
Метки: блоков, оперативной, памяти
...содержиттретий счетчик, вход которого нодкпючеик выходу второго счетчика, а выходы соединены соответственно со вторым входомбпока сравневн и одним из входов бпакауправпения, вторые входы бпоков контрпя считанной информации, подключены квыходам бпока сравнения и бпока управпения, а выходы бпоков контропя считанной информации соединены с другими вхо+дами блоков управпения.На чертеже показано предвагаемоеустройство.615546 Составитепь В. Рудаковактор Н. Каменская Техред,М. Борисова Корректор Н. Ковале аз 3917/42 Тираж 717 П ЦНИИПИ Государственного комитета Совета по делам изобретений и открытий исиое Министр овединиц на данномт пересчете, который контролируется бпоком 12.Сбой теста останавливает работу устройства по сигнау с выхода...
Предыдущий патент: Устройство для программного управления группой объектов
Следующий патент: Устройство для контроля временных параметров реле
Случайный патент: Фототермопластический материал