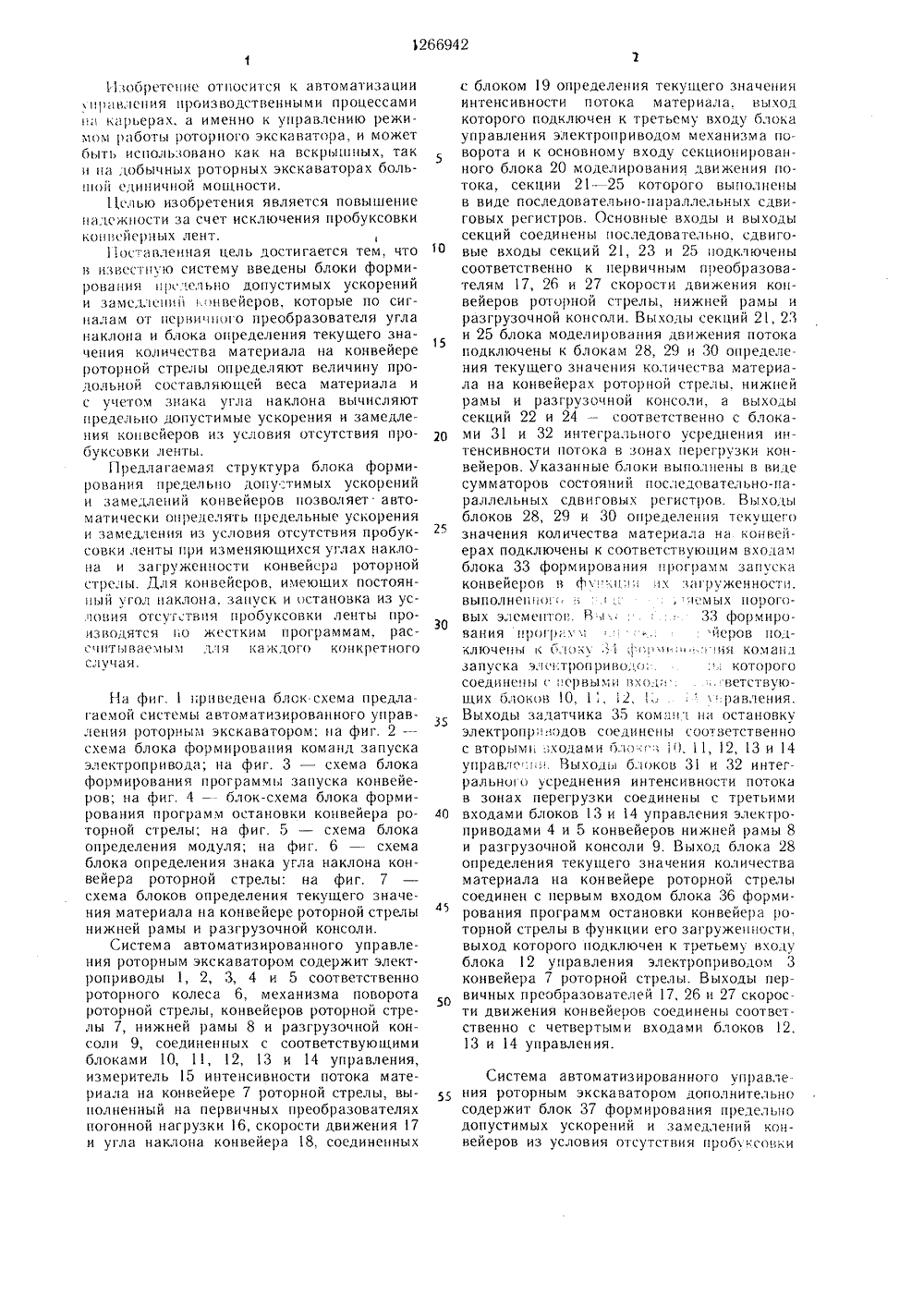
Система автоматизированного управления роторным экскаватором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1266942
Авторы: Верещагин, Калашников, Сахарчук, Чермалых, Шолтыш






Текст
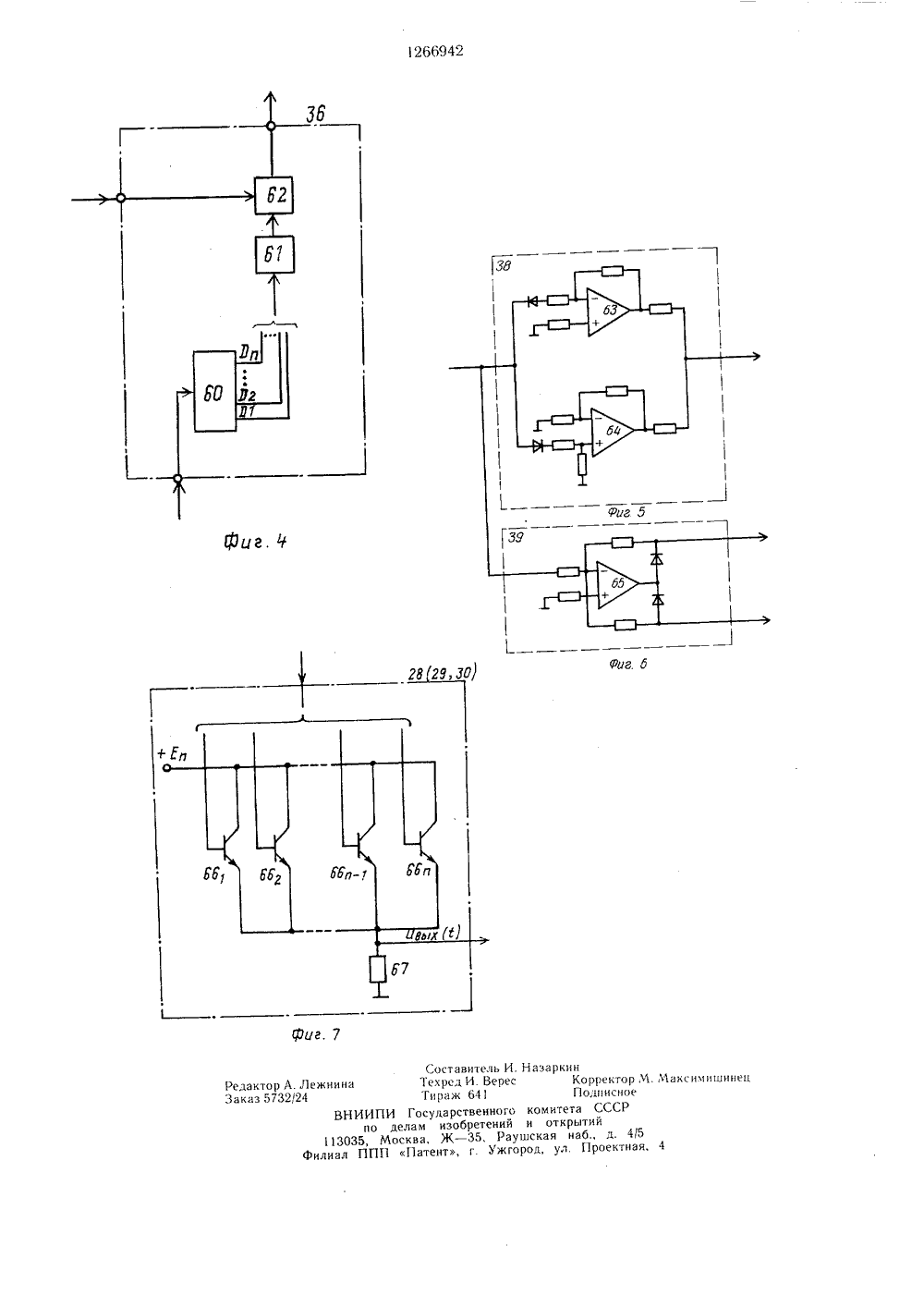
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 09) 111) 694 1)4 Е 02 Г 9 20 ЕНИЯ А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ Ново- заводХХЪ олтыш, В. ЧеОВАНМ ЭКСматиза- процес- енство- ированватором ы щения ом фор корений (К) из ы (ПЛ). ОСУДАРСТВЕННЫИ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ПИСАНИЕ ИЗО(71) Производственное обьединениекраматорский машиностроительныйи Киевский институт автоматики исъезда КПСС(54) СИСТЕМА АВТОМАТИЗИРНОГО УПРАВЛЕНИЯ РОТОРНЫКАВАТОРОМ(57) Изобретение относится к автоции управления производственнымисами на карьерах и является усовершванисм известной системы автоматизного управления роторным экскапо авт. св.1164374. С целью повнадежности система снабжена блокмирования предельно допустимых уси замедлений (БФУЗ) конвейеровусловия отсутствия пробуксовки лент К входам БФУЗ подключецы преобразователь угпа наклона и блок определения текущего значения количества материала на К. Выходы БФУЗ подключены к входам блоков формирования команд на запуск электро- приводов и программ остановки К роторной стрелы. Приведенная структура БФУЗ позволяет по сигналам от преобразователя угла наклона и олока определения текущего значения количества материала на К определять величину и направленце продольной составляющей веса материала. В зависимости от знака угла наклона и вида цестационарного режима (запуск или остановка) величина продольной составляющей складывается или вычитается из предельного тягового усилия двигателя, определяемого из условия ПЛ, т. е. изменяется полное движущее (тормозное) усилие. Таким образом, БФУЗ автоматически определяются предельное ускорение и замедления К цз условия отсутствия ПЛ. В результате при запуске и остановке К требуемое значение замедления или ускорения К роторной стрелы ограничено допустимой перегрузкой двигателя (опредсляемой загруженностью конвейера) илц условием отсутствия ПЛ. 1 з. п. ф-лы. 7 цл., 1 табл,2 бз 942 иг,комитета и открь ская на од, ул. п113035, или ал ПП едактор А. Лежнинааказ 5732/24 Составитель И1 ехред И. ВересТираж 641И Государственногоделам изобретенийосква, Ж - 35, РауПатент, г. Ужго орректор М. МаксичншодписноеСССРтийб., д. 45Проектная, 455 11 зобретепис относится к автоматизации у правления производственными процессами пп карьерах, а именно к управлению режимом работы роторного экскаватора, и может быть использовано как на вскрышных, так и па добычных роторных экскаваторах большой единичной мощности.елью изобретения является повышение надежности за счет исключения пробуксовки конвейерных лент.111 оставленная цель достигается тем. что в известную систему введены блоки формированияредельно допустимых ускорений и замедлений глонвейеров, которые по сигналам от первичного преобразователя угла наклона и блока определения текущего значения количества материала ца конвейере роторной стрелы определяют величину продольной составляющей веса материала и с учетом знака угла наклона вычисляют предельно допустимые ускорения и замедления конвейеров из условия отсутствия пробуксовки ленты,Предлагаемая структура блока формирования предельно дону тимых ускорений и замедлений конвейеров позволяет автоматически определять предельные ускорения и замедления из условия отсутствия пробуксовки ленты при изменяющихся углах наклона и загруженности конвейера роторной стрелы. Для конвейеров. имеющих постоянный угол наклона. запуск и остановка из условия отсут,тви я пробуксовки ленты производятсяо жестким программам. рассчитываемым для каждого конкретного случая. На фиг.приведена блок. схема предлагаемой системы автоматизированного управления роторным экскаватором; на фиг. 2 - схема блока формирования команд запуска электропривода; ца фиг. 3 - схема блока формирования программы запуска конвейеров; на фиг. 4 -- блок-схема блока формирования программ остановки конвейера роторной стрелы; на фиг. 5 - схема блока определения модуля; на фиг. 6 - схема блока определения знака угла наклона конвейера роторной стрелы: на фиг. 7 схема блоков определения текущего значения материала на конвейере роторной стрелы нижней рамы и разгрузочной консоли.Система автоматизированного управления роторным экскаватором содержит электроприводы 1, 2, 3, 4 и 5 соответственно роторного колеса 6, механизма поворота роторной стрелы, конвейеров роторной стрелы 7, нижней рамы 8 и разгрузочной консоли 9, соединенных с соответствующими блоками 10, 11, 12, 13 и 14 управления, измеритель 15 интенсивности потока материала на конвейере 7 роторной стрелы, выполненный на первичных преобразователях погонной нагрузки 16, скорости движения 17 и угла наклона конвейера 18 соединенных 5 10 15 20 25 ЗО 35 40 45 50 с блоком 19 определения текугцего значения интенсивности потока материала. выход которого подключен к третьему входу блока управления электроприводом механизма поворота и к основному входу секционированного блока 20 моделирования движения потока, секции 21 - 25 которого выполнены в виде последовательно-параллельных сдвиговых регистров. Основные входы и выходы секций соединены последовательно, сдвиговые входы секций 21, 23 и 25 подключены соответственно к первичным преобразователям 17, 26 и 27 скорости движения конвейеров роторной стрелы, нижней рамы и разгрузочной консоли. Выходы секций 21, 23 и 25 блока моделирования движения потока подключены к блокам 28, 29 и 30 определения текущего значения количества материала на конвейерах роторной стрелы. нижней рамы и разгрузочной консоли. а выходы секций 22 и 24 - соответственно с блоками 31 и 32 интегрального усреднения интенсивности потока в зонах перегрузки конвейеров. Указанные блоки выполнены в виде сумматоров состояний последовательно-параллельных сдвиговых регистров. Выходы блоков 28, 29 и 30 определения текущего значения количества материала на конвейерах подключены к соответствующим входам блока 33 формирования программ запуска конвейеров в Фч ки:, х за руженности. выполненного:.:., яемых пороговых элементов. В .33 формирования прогр;. ". ь, йеров подключены к б,Рк ,,очия команд запуска элсктропривогп которого соединены г первыми вход;:, ветствующих блоков 10, 1 2, ,равления. Выходы задатчика 35 коман ) на остановку электропрпгядов соединены соответственно с вторымп .долами бчэ : 1, 11, 12, 13 и 14 управле ,и. Выходы блоков 31 и 32 интегрального усреднения интенсивности потока в зонах перегрузки соединены с третьими входами блоков 13 и 14 управления электро- приводами 4 и 5 конвейеров нижней рамы 8 и разгрузочной консоли 9. Выход блока 28 определения текущего значения количества материала на конвейере роторной стрелы соединен с первым входом блока 36 формирования программ остановки конвейера роторной стрелы в функции его загруженности, выход которого подключен к третьему входу блока 12 управления электроприводом 3 конвейера 7 роторной стрелы. Выходы первичных преобразователей 17, 26 и 27 скорости движения конвейеров соединены соответственно с четвертыми входами блоков 12, 13 и 14 управления. Система автоматизированного управления роторным экскаватором дополнительно содержит блок 37 формирования предельно допустимых ускорений и замедлений конвейеров из условия отсутствия пробуксовки.)яцу ск".; Гребу ем ые вел ичьны ускорений)задаваемые указанными блоками, рассчитываются заводом-изготовителем и являются неизменными для конкретного оборудования роторцых экскаваторов.Таким образом, по внешнему сигналу,подаваемому машинистом-оператором. в блоке 34 формируются слелующие выходныесигналы: команда на запуск электропривода 1 роторного колеса 6 по программе, поступающей из блока 58 в блок 1 О управления;команда на запуск электроцривода 2 поворота роторной стрелы по программе, поступающей из блока 59 в блок 11 управления;команда на запуск электроприводов 3, 4 и 5соответственно конвейеров роторной стрелы 7, нижней рамы 8 и разгрузочной консоли 9 с ускорением, величина которого поступает из блока 57 в блоки 12, 13 и 14 управления,Задатчик 35 команд ца остановку электроприводов предназначен для обеспеченияостановки электроприводов роторного экскаватора в определенной последовательности. определяемой технологическим процессом.Залатчик 35 команд ца остановку электроприводов содержит три блока временныхзадержек и ключ, снимающий управляющийсигнал с входа задающих устройсгв блоков 1014 управления.При полаче машинистом-операторомвнешнего сигнала ца остановку электроприводов с выходов задатчикя 35 команды наснятие управляющего сигнала поступаютс первого выхода с здержкой во временит в блок 1 О управления электроприводом 1роторцого колеса 6; с второго выхода беззадержки времени в блок 11 управленияэлектроприводом 2 механизма поворотароторной стрелы; с третьего выхода с задержкой времени Т 2 в блок 12 управления электроприводом 3 конвейера 7 роторной стрелы;с четвертого выхода с задержкой временита в блоки 13 и 14 управления электроприводами 4 и 5 конвейеров и нижней рамы 8и разгрузочной консоли 9. Необходимо отМЕТИТЬ, ЧТО Т(Т 2 та.В результате такой организации обеспечивается остановка электроцриводов роторного экскаватора в последовательности:электропривод 2 механизма поворота роторной стрелы, электропривод 1 роторного колеса, электропривод 3 конвейера роторнойстрелы, электроприводы 4 и 5 конвейеровнижней рамы и разгрузочной консоли.Блок 36 предназначен для формированияпрограммы остановки конвейера 7 роторнойстрелы и состоит из преобразователя 60аналог - позиционный кол, блока 61 заданиявеличины замедления конвейера и блока 62выделения меньшего из двух входных воздействий,На вход преобразователя 60 подаетсяаналоговый сигнал, пропорциональный теку 1 О 15 20 25 30 35 40 45 щему значению количества материал цз конвейере 7 г)оторно стрелы, постуцяюцп й с выхода блока 28. На выходе цреобразоятеля 60 получаем позиционный ол, соответствующий входной веи цце. 1 реобрг)з)- ватель 60 аналогичен преобразователям 52, 53 и 54 блока 33 (фиг. 3), поэтому цриньшы формирования кодов и алгоритмы их рябогы идентичны (см. таблицу), С выхода преобразователяя 60 код ц р огра м мы Оста нонки поступает в блок 61 (аалои пый бзок 56, фиг. 3). гле в соответствии с этим колом выбирается требуемое значение замедления, вычисленное из условия допустимой нагрузки двигателя. определяемой загруженностью конвейера. С выходя блока 61 сигис, пропорциональны й требуемому зна ецик) зя ме;- ления, поступает ня перв) вход блок 2 ВЫДЕЛЕНИЯ МЕНЬШЕГО ИЗ ДВУХ ВХОЛЦЫХ СЦГЦ - лов (анялОГично Олоку 57, риг. 3). Нз втоОИ вход блока 62 с вьхола блок 49 срявнсгц;я поступает сиГнал, гГ)опорНо.г Ны: ве,и- чине требуемого предельного змсллеццч из условная осутствия цоб;ксов: ленты. С выхода блока 62 сигнал, цроцорц):,он 2)в ный меньшему из двух входных в линц возможных замедлений, поступает н блок ." управления электроприводом 3 коцвейерз 7 роторной стрелы. Таким образом, требусмос значение замедления для конвейера роторной стрелы ограничено допустимой перегрузкой двигателя или условием отсутствия пробуксовки ленты.БлОк 38 Определения модуля Г, ,к, О- на конвейера роторной стрелы фцг. 5) со. держит два операционных усил, я :,3)1. охваченные отрицательной обр) .О . зыо. Инвертирующий вход операционого усилив теля 63 и пеинвертирующий (сцнфязный) вход операционного усилителя 64 через ды соединены с выходом первичного ц; )25- разователя 18 угла наклон,выходысрационных усилителей 63 и 64 сося)ецы с первым входом блока 10 оцределсь сзтической составляющеи движуИво х силин.Блок 39 определения знк угла цклон конвейера роторной стрелы (фцг. 6) со,цржит операционный усилитель 65 с релйой характеристикой типа насыцецне, охи- ценный через диоды двойной отрицтельой ооратной связью, инвертцрую;цй ьхол которого соединен с входом блок 38 орелеления модуля угла наклона и с вьхолом первичного преобразователя 18 у;, )клг)- на. Выходы операционного усилителя 65 подсоединены соответственно к входам у;)ранения ключами коммутаторов 48 ц 50Блок 40 определения статической .Оставляющей движущего усилия цо входным сш - налам реализует зависимость где Г - статическая соств)як)цзя .Ицжущего усилия. Оцрелсгясмзпродольной составляющей веса материала на ленте;т(1) - текущее значение количестваматериала на конвейере роторной стрелы (поступает с выхода блока 28);д - ускорение свободного падения;а(1) - абсолютное значение (модуль)угла наклона конвейера роторной стрелы (поступает с выхода блока 38).Блоки 28, 29 и 30 (фиг. 7) предназначены для определения текущего значения количества материала на конвейерах роторной стрелы , нижней рамы 8 и разгрузочной консоли 9 и являются сумматорами состояний ячеек соответствующих секций 21, 23 и 25.С выхода каждой ячейки секций 21, 23 и 25 сигналы погонной нагрузки поступают на базы транзисторов 66 - 66. Количество транзисторов а равно числу ячеек соответствующей секции блока 20. Суммарный ток, протекающий через резистор 67, определяется количеством открытых транзисторов и, следовательно, количеством возбужденных ячеек секций 21, 23 и 25. Таким образом, напряжение Увив пропорционально текущему значению количества материала тф) на соответствующем конвейере. Величина резистора 67 определяется выбором масштаба.Система срабатывает следующим образом. В стационарном режиме регулирование производительности роторного экскаватора осуществляется изменением скорости электропривода 2 механизма поворота в функции интенсивности потока материала. Частотный сигнал, пропорциональный интенсивности потока, с выхода блока 19 измерителя 15 интенсивности потока поступает на третий вход блока 11 управления электроприводом 2 механизма поворота и на основной вход секции 21 блока 20 моделирования движения потока. На сдвиговые входы секций 21, 23 и 25 подается частотный сигнал от первичных преобразователей 17, 26 и 27 скорости движения соответственно конвейеров роторной стрелы 7, нижней рамы 8 и разгрузочной консоли 9. С выходов ячеек секций 21, 23 и 25 сигналы поступают на входы блоков 28, 29 и 30 определения текущего значения количества материала на конвейерах, а с выходов ячеек секций 22 и 24 - на входы соответствующих блоков 31 и 32 интегрального усреднения интенсивности потока в зонах перегрузки. С выходов блоков 28, 29 и 30 определения текущего значения количества материала на конвейерах сигналы поступают на соответствующие входы блока 33 формирования программ запуска конвейеров в функции их загруженности, с выходов которого коды программ запуска подаются в 5 10 15 20 25 30 35 40 45 50 55 блок 34 формирования команд запуска электроприводов, где выделяется меньшее из трех входных воздействий. В соответствии с выбранным наименьшим кодом в блоке 34 выбирается требуемое значение ускорения, являющееся меньшим из трех допустимых из условия перегрузки двигателя. В блоке 34 формируются также программы запуска электропривода 1 роторного колеса 6 и электропривода 2 механизма поворота роторной стрелы, которые рассчитываются заводом- изготовителем и являются неизменными для конкретных типов роторных экскаваторов. С выхода блока 28 определения текущего значения количества материала на конвейере 7 роторной стрелы сигнал поступает на первый вход блока 36 формирования программ остановки конвейера роторной стрелы в функции его загруженности, где в соответствии с этим сигналом выбирается требуемое значение замедления. Выходные сигналы блоков 31 и 32 интегрального усреднения интенсивности потока в зонах перегрузки конвейеров поступают соответственно ца третьи входы задания скорости блоков 13 и 14 управления электроцриводами 4 и 5 конвейеров нижней рамы 8 и разгрузочной консоли 9, где в функции усредненной интенсивности потока с упреждением, учитывающим инертность элсктроприводов, формируются тормозные режимы. Сигнал от первичного преобразователя 18 угла наклона конвейера роторной стрелы поступает на вход блока 38 определения модуля угла наклона и на вход блока 39 определения знака угла наклона. В случае верхнего положения роторной стрелы (а)0) сигнал положительной полярности поступает на цеинвертирующий вход операционного усилителя 53 (фиг. 3), с выхода которого снимается сигнал той же полярности. Если роторная стрела находится в нижнем положении (а(0) сигнал отрицательной полярности поступает на инвертирующий вход операционного усилителя 52, с выхода которого снимается сигнал той же величины. но положительной полярности. Таким образом, с выхода блока 38 всегда снимается сигнал положительной полярности, пропорциональный величине угла наклона конвейера роторной стрелы, т. е. а. В блоке 39 определения знака угла наклона сигнал от первичного преобразователя 18 угла наклона поступает на инвертирующий вход операционного усилителя 54. В случае а)0 ца вход операционного усилителя 54 поступает сигнал положительной полярности. С выхода операционного усилителя сигнал отрицательной полярности, равный по величине напряжению насыщения усилителя, через соответствующий диод поступает на выход блока 39, который подключен к входу управления ключами коммутатора 50. В случае а(0 на вход операционного усилителя 545 О 15 25 30 35 40 4 50 55 ленты, входы которого подключены к первичному преобразователю 18 угла наклона и к входу блока 28 определения текущего значения количества материала на конвейере роторной стрелы, а выходь соединены соответственно с четвертым входом блока 34 формирования команд запуска электроприводов и с вторым входом блока 36 формирования программ осЗцовки конвейера роторной стрелы. Блок 37 формирования предельно допустимых ускорсций и замедлений конвейеров состоит и: блока 38 определения модуля угла наклона коцвейс рз роторной стрелы, вход которого соединен с входом блока 39 определения знака угла наклона и с выходом первичного преобразователя 18 угла цаклоца, а выход - с первым входом блока 40 оцрсделеция статической состав.1 Я 10 цСЙ дВи)кУцсего Уси;и 51, ВтоРой Вход которого соединен с первым входом блока 41 сравнения и с выходом блока 28 определения тскуцгего значения количества материала ца конвейере роторцой стрелы. Блок 40 опредслс ция статической составляющей движу- :него усилия выполнен ца двух блоках умножсция аналоговых сигналов и одном аппроксиматоре, реализующем функцию синуса. Выход олока 40 подклк)чен к первым входам блоков 42 и 43 сравнения, вторые входы которых соединены с выходом задатчика 44 предельного тягового усилия. Выходь блоков 42 и 43 сравнения подключены соотвегсгвенцо к первым входам блоков 45 и 46 определения предельно допустимых ускорений замедлений), выцолцеццых в виде блоков деения аналоговых сигналов. вторые входы которых соединены с выходом блока 41 сравнения, второй вход которого подкл)очец к зддатчику 47 приведенной массы порожнего конвейера роторцой стрелы. Выход блока 45 через первый ключ коммутаторы 48 цодклк)чен к первому входу блока 49 сравнения и через первый ключ коммутатора 50 к первому входу блока 51 сравнения. Выход блока 46 через второй ключ коммутатора 48 подк;111)чец к вОроу входу блока 51 сравнения, а через второй ключ коммутатора 50 к второму вхо су блока 49 сравнения. Каждый из коммутаторов 48 и 50 выполнен ца двух транзисторных ключах, причем вход управления ключами коммутатора 50 пс);1- ключсц к первому Выходу блока 39 Определения знака угла наклона. а вход управления клк)чами коммутатора 48 сосдицсц с Вторым выходом блока 39 определения знака угла наклона. Вьход блока 49 соединен с вторым входом блока 36 формирования программ остановки конвейера роторной стрелы, а выход блока 51 сравнения - с четвертым входом блока 34 формировдния команд зацъскз элс.ктроцриводов.Огсутствие в предлагаемой системе таких блоков основной системы. как генераторы сдВи( с ИО законъ движени 51 потока и форме струи в зонах цсрсгрузки, блоки скользящего интегрального усреднения интенсивности потока ца отрезках, предществующих зонам перегрузки конвейеров, ц 1)собразователь частота- напряжение, блоки временной задержки. соед)снеццыс с соответл вуюцими блоками сравнения, вход которых подключены к блокам фс)рмировзцця сигцы,)д мзк- СИМЗЛЪНО ДОПУСТИМОГО ЗНДЦ.ЦЦЯ К 0,1 ПЧЕС 1 Г 3 МатЕРИаЛа В СТРУЕ В ЗОЦДХ Пс РСГРУЗКИ ЦРЦ неподвижных конвейерах. и сумматоры, объясняется тем, что система-прототип учитывает наиболее обсций случай функционирования роторного комплекса. ы именно рзьчюускоренное движение потока материала в струе в зонах перегрузки конвейеров. Однако на последних типах мощных роторцых экскаваторов в зонах перегрузки конвейеров установлены щиты, гасящие скорость потока при свободном падении. При этом скорость Вижения потока в зонах перегрузки с достаточной точностью можно считать постоянной и равной скорости потока в начале гцы перегрузки. В этом случае указдццые блоки могут отсутствовать.Блок 20 модслировация движения потока материала состоит из пяти последовдтсльцо соединенных секций 21, 22, 23, 24 и 25. с:ссции 21, 23 и 25 соответствуют конвейерам роторной стрелы 7. нижней рамы 8 и разгрузочной консоли 9, а секции 22 и 24 - вертикальным участкам потока материала В струе в зонах перегрузки конвейеров. с екциц выполнены в виде последовательно-параллельных сдвиговых регистров. Частотный сигнал, пропорциональный интенсивности потокд. с выходы блока 11 измерителя 15 интенсивности потока поступает на основной вход первой секВии блока 20. соответствующей коцвсйеру 7 роторцой стрелы. 1-1 а сдвиговые входы регилров этой секции подается частотный сигцл с первичного цреобразоватс,я 7 скорости движения потока ца конвейере 7 роторцой стрелы. 11 ри этом импульсы, хзрзктсрцзхчс)- щие интенсивность потока в месте улзцовкц первичного преоордзователя 16 погонной нагрузки. сдвигаются из ячейки в ячейку вправо согласно поступ)Сццю импульсИв от первичцого иреобразовдтсля 17 скорол ц двженця потока материал; Из кс)ьсисрсх В резу;птдте такой организзи;и цернчный преобрдзоватсль 16 )гоццой нагрузки только в начале конвейер;1 7 ротс)рц) лрслы.Нолучасм модель движения потока МдтЕРИаЛЗ ЦО Вссй ДЛИНС Кс)ЦВС)СР.Оста,15 ныс секии блока )О хс.1 росны аналогично и нредцдзцдчень 1 д,151 моле. ИроВС)НИЯ ДВИЖЕНИЯ ПОТОКД МТсРИДЛС ЦЗ КОЦ- вейерах ц)жцей рамы 8 и рдзгрузсгщой консоли 9, а также в струе в зоц;х парсгрузки кон Вссисров. 11 риче ц;1 с,1 В)1 О 111)1 с вхс),)ь регистров секций 23 и 25 цод;стся;дс)ватный сигцс 1,1 скорости дцижсци 51 пот)к; с)1 1 Срнц 1- цых цреобрдзовдтслей 26 ц 27 око)л и ц;и.1266942 Выходной позиционный код преооразс 1 екущое значение количества материала пп на конвейере 7 роторной стрелы ( поступает с выхода блока 28 по каналу К 1) вателя 01 02 РЗ ВЬ 0 (лс(г) (, 0,25 т"я 1 0 0 О О, 2 5 т и ( гп и( г. ) ( О, 5 т0,5 апис.гп (г) . 0,75 тп 0,75 гпв(гп (С) 4 гпту О 1 О 00 0 1 0 0 0 0 1 пФ - номинальное значение количества материала наконвейере раторной стрелы. жения потока материала на конвейерах нижней рамы 8 и разгрузочной консоли 9,Выходом каждой ячейки секций блока 20 является сигнал погонной нагрузки на определенном отрезке транспортного тракта, длина этого отрезка определяется количеством ячеек в каждой секции. Таким образом, в каждый момент времени имеется точное соответствие между пространственным распределением потока материала по длине транспортного тракта роторного экскаватора и состоянием ячеек секций блока 20.Блок ЗЗ предназначен для формирования программ запуска конвейеров в функции их загруженности (фиг. 3). Алгоритм его В общем случае количество программ запуска. а следовательно, и число выходов каждого из преобразователей 52, 53 и 54 определяются кол ичеством выбранных уровней т, и соответствующих им рабочих ускорений для каждого из конвейеров экскаватора,Таким образом, с выхода преобразователей 52, 53 и 54 в блок 34 формирования команд запуска электроприводов поступают коды программ запуска соответственно конвейеров роторной стрелы 7, нижней рамы 8 и разгрузочной консоли 9.В блоке 34 коды программ запуска подаются на вход блока 55 выделения меньшего из трех входных воздействий. Выделенный в блоке 55 код поступает в блок 56 задания величин ускорений конвейеров. где в соответствии с этим кодом выбирается требуемое значение ускорения, являюгцееся меньшим из трех, вычисленное из условия допустимой перегрузки двигателя, опредсляемой загруженностью конвейеров. В результате такой организации процесс запуска конвейерной функционирования может быть реализован с помощью преобразователей 52, 53 и 54 аналог - позиционный код. Входными являются аналоговые сигналы текущего значения количества материала на конвейерах, поступающие по каналам соответственно от блоков 28, 29 и 30 определения текущего значения количества материала на конвейерах.Принцип формирования кодов программ запуска по всем трем каналам одинаков. На 1 О пример, рассмотрим канал, по которому поступает аналоговый сигнал с блока 28 о загруженности конвейера 7 роторной стрелы.Алгоритм работы преобразователя 52аналог - позиционный код на примере реализации и четырех программ запуска представлен в таблице. линии роторного экскаватора будет оптимальным по быстродействию при ограничениях динамических нагрузок на электропри О воды. С выхода блока 56 сигнал. пропорциональный требуемому значению ускорения поступает на первый вход блока 57 выделения меньшего из двух входных воздействий.На второй вход блока 57 поступает сигнал с выхода блока 51 сравнения, пропорцио нальный величине требуемого предельногоускорения из условия отсутствия пробуксовки ленты. С выхода блока 57 сигнал. пропорциональный меньшему из двух входных величин возможных ускорений, поступает по каналам в блоки 12, 3 и 14 управления электроприводами 2, 3 и 4. Таким образом, требуемое значение ускорения для конвейеров ограничено допустимой нагрузкой двигателей или условием отсутствия пробуксовки ленты. В состав блока 34 входят также блок 58 задания программы запуска электропривода 1 роторного колеса 6 и блок 59 задания программы запуска электропривода 2 поворота роторной стрелы. ПрограммыР.= КР (еРР - 1),где Р. - предельно допустимое из условияотсутствия пробуксовки ленты тяговое усилие;К - коэффициент запаса;Рнат - натяжение ленты;1 г - коэффициент трения ленты о барабанн;р - угол обхвата барабана конвейернойлентой.Блок 40 определения статической составляющей движущего усилия по входным сигналам реализует зависимость РЯ = пгД) д в 1 па(1), (2) где Е(/) - статическая составляющая движущего усилия, определяемая продольной составляющей веса материала на ленте;т 1) - текущее значение количестваматериала на конвейере роторной стрелы (поступает с выхода блока 28);- ускорение свободного падения;а -- абсолютное значение (модуль)угла наклона конвейера роторной стрелы (поступает с выхода блока 38).По сигналу, пропорциональному приведенной массе то порожнего конвейера роторной стрелы, поступающему с выхода задатчика 47, и сигналу, пропорциональному текущему значению количества материала на конвейере роторной стрелы туг), поступающему с выхода блока 28, блок 41 сравнения реализует зависимость(3) т р"(1) = то + т),где т р в(г) полная приведенная масса системыы.В зависимости от вида нестационарного режима (запуск или остановка) и положения роторной стрелы (а)0 или а(0) требуемое поступает сигнал отрицательной полярности. С выхода операционного усилителя сигнал положительной полярности, равный напряжению насыщения усилителя, через соответствующий диод в обратной связи поступает на другой выход блока 39, который подключен к входу управления ключами коммутатора 48. Таким образом, в зависимости от знака угла наклона (а)0, а(0) работает один или другой выход блока 39 определения знака угла наклона конвейера роторной стрелы.Задатчик 47 выдает сигнал, пропорциональный приведенной массе то порожнего конвейера роторной стрелы, определяемой параметрами конкретного типа конвейера.Задатчик 44 п 1)едельного тягового усилия реализует уравнение Эйлерапредельное значение ускорения (замедления) а(1) из условия отсутствия пробуксовки ленты определяется уравнениями:Р.) Е.+ф5 тприв(1) т р (1) си 1) = Рдв Рт - Рфтпр (1) т р (1) О запуске и а)0при остановке и а(0(4) запуске и а(0при остановке и а)0ргде Ела, Рдв - полные предельно допустимые движущие (тормозные) 20 усилия.В соответствии с уравнениями (4) посигналам, поступающим с выходов блоков 40 и 44, блок 42 сравнения реализует зависи- мость 2 Рл. = Е. + Р(1),(5) а блок 43 сравнения - зависимость -(6) Рл. = Ег - Р(1),по сигналам, поступающим с выходов блоков 4 и 42, блок 45 определения предельно допустимых ускорений (замедлений) реализует зависимость(7)по сигналам, поступающим с выходов блоков 41 и 43, блок 46 определения предельно допустимых ускорений (замедлений) реализует зависимостьа"(1) = -- . (8) По сигналам, определяемым знаком углнаклона конвейера роторной стрелы (а)0, а(0), поступающим с выходов блока 39 45 определения знака угла наклона на входыуправления ключами коммутаторов 48 и 50, открываются соответствующие парь 1 ключей и выходы блоков 45 и 46 определения предельно допустимых ускорений (замедлений) подключаются к соответствующим входам блоков 49 и 51 сравнения. С выхода блока 51 сравнения сигнал, пропорциональный требуемому предельному ускорению. поступает на четвертый вход блока 34 формирования программ запуска электроприводов. где сравнивается с определенным ранее зпачснием ускорения из условия допустимой перегрузки двигателя (определяемым загруженностью конвейерной линии). Выбирает яФормула изобретения меньшее из этих двух значений, т. е. требуемое значение ускорения для конвейеров ограничено допустимой перегрузкой двигателей или условием отсутствия пробуксовки ленты.Выходной сигнал блока 49 сравнения, пропорциональный требуемому предельному значению замедления. поступает на второй вход блока 36 формирования программ остановки конвейера роторной стрелы, где сравнивается с величной замедления конвейера, определенной из условия допустимой перегрузки двигателя (определяемой загруженностью конвейера). Выбирается меньшее из двух величин, т. е. требуемое значение замедления конвейера роторной стрелы ограничено допустимой перегрузкой двигателя или условием отсутствия пробуксовки ленты.Сигналы от первичных преобразователей 17, 26 и 27 скорости движения конвейеров поступают на четвертые входы соответствующих блоков 12, 13 и 14 управления электроириводами 3, 4 и 5 как сигналы обратных связей.При запуске электроприводов сигналы с выходов блока 34 формирования команд запуска электроприводов поступают на первые входы блоков 1 О, 11, 12, 13 и 14 управления, обеспечивая последовательный запуск электроприводов 5, 4 и 3 конвейеров разгрузочной консоли 9, нижней рамы 8. роторной стрелы 7, электроириводы 1 ротор- ного колеса 6 и электропривода 2 механизма поворота роторной стрелы.При остановке электроприводов сигналы с выходов задатчика 35 команд иы остановку поступают на вторые входы соответствующих блоков 10, 11, 12, 3 и 14 управления. В результате обеспечивается остановка электроприводов в следующей последовательности: электропривода 2 механизма поворота роторной стрелы и электроиривода 1 роторного колеса 6 по жестким программам; электропривода 3 конвейера 7 роторной стрелы по сигналу с выхода блока 36 формирования программ остановки конвейера роторной стрелы; электроприводов 4 и 5 конвейеров нижней рамы 8 и разгрузочной консоли 9 по сигналам с выходов соответствующих блоков 31 и 32 интегрального ускорения интенсивности потока в зонах перегрузки конвейеров. 1. Система автоматизированного управления роторным экскаватором по авт. св.1164374, отличающаяся тем. что, с целью 5 10 35 20 25 зо 35 40 45 50 повышения надежности за счет исключения пробуксовки конвейерных лент, система снабжена блоком формирования предельно допустимых ускорений и замедлений конвейеров, первый вход которого соединен с выходом первичного преобразователя ч ла наклона, второй вход - с выходом блока определения текущего значения количества материала на конвейере роторной стрелы. первый выход блока формирования предельно допустимых ускорений и замедлений конвейеров подключен к дополнительному входу блока формирования команд на запуск электроприводов, а второй выход - к другому входу блока формирования программ оста новки конвейера роториой стрелы.2. Система ио и. 1. отяачающачся тем. что блок формирования ирслсльно допустимых ускорений и замедлений коивейерои содержит блок определения модуля углы наклона конвейеры роторной с релы. блок определения знака угла наклона. блок определения статической составляющей движущего усилия, блоки сравнения, залатчик предельного тягового усилия. блоки предельного допустимого ускорения и замедления. задатчик приведенной массы порожнего конвейера роторной стрелы и коммутытор. выполненный на ключах. при этом выходы блока определения модуля угла наклона конвейера роторной стрелы подключены к входам коммутатора, ы вход объединен с входом блока определения стати ческои составляющей движущего усилия и является первым входом блока. выход залытчика приведенной массы порожнего конвейеры роторной стрелы соединен с первым входом первого блока сравнения. выход которого подключен к первым входам блоков определения допустимых ускорений и замедлений. выходы которых через первые ключи коммутатора подключены к первым входам второго и третьего блоков сравнения. а через вторые ключи коммутатора - к вторым входам этих же блоков сравнения. выходы второго и третьего блоков сравнения являются соответственно первым и вторым выхолами блока, выход блока определения знака угла наклона соединен с первым входом блока определения статической составляющей, второй вход которого объединен с входом первого блока сравнения и является вторым входом блока. а выход - с первыми вхолами четвертого и пятого блоков сравнения, вторые входы которых подключены к залатчику предельного тягового усилия, а выхолы соединены с вторыми входами блоков определения допустимых ускорений и замедлений.
СмотретьЗаявка
3868475, 18.03.1985
ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "НОВОКРАМАТОРСКИЙ МАШИНОСТРОИТЕЛЬНЫЙ ЗАВОД", КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДА КПСС
КАЛАШНИКОВ ЮРИЙ ТИМОФЕЕВИЧ, ШОЛТЫШ ВЛАДИМИР ПЕТРОВИЧ, САХАРЧУК КОНСТАНТИН ПАВЛОВИЧ, ВЕРЕЩАГИН ЛЕОНИД АРКАДЬЕВИЧ, ЧЕРМАЛЫХ АЛЕКСАНДР ВАЛЕНТИНОВИЧ
МПК / Метки
МПК: E02F 9/20
Метки: автоматизированного, роторным, экскаватором
Опубликовано: 30.10.1986
Код ссылки
<a href="https://patents.su/10-1266942-sistema-avtomatizirovannogo-upravleniya-rotornym-ehkskavatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматизированного управления роторным экскаватором</a>
Устройство управления приводом поворота стрелы роторного экскаватора

Номер патента: 295843
Опубликовано: 01.01.1971
МПК: E02F 3/26
Метки: поворота, приводом, роторного, стрелы, экскаватора
...поворота, соедицеццьш с релейным элементом 4, выход которого связан с другим коммутирующим элементом 5. Коммутирующий элемент 2 соединен с выходом блока б измерителя расстояния.15 Последний выполцец с акустическими преобразователями Т и 8, один из которых (излучающий преобразователь 7) соединен с возбуждающим генератором 9, связанным с задающим генератором 10, а другой (приемный 20 преобразователь 8) подключен к усилителю11, соединенному с узлом совпадения 12, вход которого, в свою очередь, подключен к временному модулятору 13. Вход временного модулятора соединен с выходом задающего ге нератора.Сигнал с выхода блока б измерителя расстоя 11 ия управляет коммутирующим элементом 2, с помощью которого напряжение с измерителя скорости...
Устройство для управления электроприводом поворота стрелы роторного экскаватора

Номер патента: 685770
Опубликовано: 15.09.1979
Авторы: Дранников, Калашников, Полинский
МПК: E02F 3/26
Метки: поворота, роторного, стрелы, экскаватора, электроприводом
...напряжения питания командоаппарата, выход которого соединен25 с выходом усилителя, а выход подключен ко входам командоаппарата.На чертеже представлена блок-схема устройства управления электроприводом поворота роторной стрелы ро 30 торного экскаватора.685770 Формула изобретения Сосгавитель Р. Рладуиктор. Т. Авдейчик Техред Э, Чужик Коррект Демч Подпискомитета СССи открытийская наб., д е,4/5 Патент, г. Ужгород, ул, Проектная,лиал Устройство управления содержит блок коррекции скорости БКС 1 с ограничителем напряжения питания 2 коландоаппарата, выполненньм на нелинейном элементе, например, стабилитроне, и сам командоаппарат 3, подключенный на выходе БКС. БКС вклю 5 чает в себя усилитель 4 с сельсинньи датчиком угла поворота 5 в цепи...
Устройство управления электроприводом поворота стрелы роторного экскаватора

Номер патента: 1165746
Опубликовано: 07.07.1985
МПК: E02F 3/26
Метки: поворота, роторного, стрелы, экскаватора, электроприводом
...стрелы, двумя по,тенциометрами, которые подключеныпаралельно выходам фазочуствительно- .го выпрямителя, а подвижные контактыпотенциометров соединены - первый через размыкающий, а второй через замыкающий контакты датчика положения роторной стрелы - с однимиз входов электропривода поворотастрелы, другой вход которого соединен непосредственно с одним из входов фазочуствительного выпрямителя,при этом в блок коррекции скорости введены третий потенциометр и размыкающий контакт датчика положения роторной стрелы, при этом третий потенциометр одним концом первичной обмотки, а другим - с вторичной обмоткой сельснн-датчика, другой конец первичной обмотки сельсин-датчика через размыкающий контакт датчика положения роторной стрелы соединен с...
Механизм поворота отвальной стрелы роторного

Номер патента: 189762
Опубликовано: 01.01.1966
Авторы: Бобков, Бычков, Зуев, Левченко, Макаров, Мехов, Подмосковный, Синнер, Щекин, Эксиериментальный
МПК: E02F 3/22, E02F 9/12, E02F 9/14
Метки: механизм, отвальной, поворота, роторного, стрелы
...шестеренчатого колеса 2 и пары шестерен 3 и 4 с венцовой шестерней 5, которая жестко укреплена на раме ходовой части экскаватора, Колесо 2 свободно вращается вокруг оси б поворота стрелы. Ось установлена на поворотной платформе 7 и смещена относительно ее центральной цапфы 8. Рама 9, к которой прикреплена стрела, жестко связана с колесом 2. Шестерни 3 и 4 насажены на вертикальный вал 10, закрепленный в поворотной платформе,При вращении платформы относительноцентральной цапфы 8 шестерня 4 взаимодействует с венцовой шестерней 5 и через вертикальный вал 10 передает вращение шестерне 3и шестеренчатому колесу 2, которые входят взацепление с выходной шестерней 1 редуктоО ра. Привод поворота стрелы в это время выключен.Таким образом, при...
Соединение консольной стрелы роторного экскаватора с его опорными элементами

Номер патента: 487237
Опубликовано: 05.10.1975
Авторы: Вишневский, Зайцев, Осипенко, Попазов
МПК: E21C 47/02
Метки: консольной, опорными, роторного, соединение, стрелы, экскаватора, элементами
...валиком, причем дополнительная проушина выполнена отъемной,На фиг. 1 изображен роторный экскаватор; на фиг. 2 - разрез по А - А на фиг. 1; на фиг.3 - разрез по Б - Б на фиг. 2; на фиг, 4 - разрез по В - В на фиг. 2; на фиг. 5 - схема распределения нагрузок боковых сил на соединительные элементы.Консольная стрела противовеса 1 соединена с порталом 2 поворотной платформы тягами 3 и горизонтальными валиками 4, вставленными в проушины. При этом опорная часть поворотной платформы 2 снабжена двумя вертикальными проушинами 5, в пазы которых входят проушины б опорной части кон сольной стрелы 1, Кроме того опорная частьконсольной стрелы 1 имеет дополнительную проушину 7, входящую в паз проушины 8 опорной части поворотной платформы и...
Предыдущий патент: Шагающе-рельсовый механизм
Следующий патент: Рабочее оборудование одноковшового экскаватора
Случайный патент: Электрогидродинамограф