Способ определения компонент вектора магнитной индукции
Формула | Описание | Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 786537
Автор: Бледнов
Формула
Способ определения компонент вектора магнитной индукции, включающий линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя и определение величины модуля вектора магнитной индукции преобразованного поля, отличающийся тем, что, с целью повышения точности, ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с вертикальной плоскостью, содержащей вектор магнитной индукции, затем ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с направлением вектора магнитной индукции, после чего определяют углы между направлением вектора магнитной индукции и направлениями определяемых компонент.
Описание
Известен способ определения компонент векторной индукции (ВМИ) с помощью абсолютных модульных преобразователей [1] включающий преобразование измеряемого поля созданием дополнительных полей заданной ориентации, поочередно компенсирующих неизмеряемые компоненты. Использование этих методов на борту движущихся носителей (объектов) предусматривает последовательное измерение компонент в разных точках траектории носителя, что приводит к погрешностям компонентной съемки геомагнитного поля.
Известен способ определения компонент ВМИ, включающий линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя до совмещения направления преобразования с коэффициентом, не равным двум другим, с направлением измеряемой компоненты, а любого другого направления преобразователя с плоскостью, в которой находится первое направление и ВМИ, измерение модулей ВМИ измеряемого и преобразованного полей с последующим определением компонент ВМИ [2]
Недостатком этого способа является то, что подобное измерение подразумевает наличие двух модульных преобразователей, установленных в двух точках. При этом, если носитель имеет собственное магнитное поле, то точность измерения снижается за счет наличия градиента магнитного поля между точками установки преобразователей.
C целью повышения точности в способе определения компонент вектора магнитной индукции, включающем линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя и определение величины модуля вектора магнитной индукции преобразованного поля, ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с вертикальной плоскостью, содержащей вектор магнитной индукции, затем ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с направлением вектора магнитной индукции, после чего определяют углы между направлением вектора магнитной индукции и направлениями определяемых компонент.
На фиг. 1 представлена векторная диаграмма, поясняющая последовательность операций способа; на фиг. 2 поясняется принцип определения компонент в заданных координатах Х, У, Z; на фиг. 3 приводится блок-схема устройства, реализующего способ измерения компонент ВМИ.
Устройство содержит модульный преобразователь 1, эллипсоидальную (сфероидальную) оболочку 2, измеритель 3, индикатор 4 положения направления преобразования (с коэффициентом Р1) относительно направления ВМИ измеряемого поля, систему 5 ориентации в горизонтальной плоскости, систему ориентации в вертикальной плоскости 6.
Способ осуществляют следующим образом. Вращая эллипсоидальную (сфероидальную) оболочку 2 в горизонтальной плоскости, с помощью системы ориентации 5 находят положение, при котором значение преобразованного поля, измеренное модульным преобразователем 1, будет максимально (минимально). Измеритель 3 определяет это значение, а индикатор положения 4 фиксирует положение оболочки 2 в момент совпадения выбранного направления преобразования с вертикальной плоскостью, содержащей ВМИ измеряемого поля. Затем, вращая оболочку 2 с помощью системы ориентации 6, добиваются совпадения этого направления преобразования с направлением измеряемого поля. Индикатор 4 по максимальному (минимальному) значению модуля ВМИ преобразованного поля определяет совпадение направления оси, вдоль которой коэффициент преобразования максимален (минимален). Зафиксировав значение ВМИ преобразованного поля в момент совпадения выбранного направления преобразования с направлением ВМИ, находят модуль ВМИ измеряемого поля. Определив углы
Из фиг. 1 видно, что при совмещении выбранного направления преобразования (коэффициент Р1) с вертикальной плоскостью, в которой лежит ВМИ измеряемого поля, получим
где Т модуль вектора ВМИ.
Если теперь совместить в этой вертикальной плоскости направление преобразования с направлением измеряемого поля (J=0), получим
T1=P1T.
Таким образом, по измерению ВМИ преобразованного поля Т1, т.е. по его максимальному (Р1>P2
Затем определяют значения компонент ВМИ по формулам
X = Tcos
где
Способ определения компонент вектора магнитной индукции, включающий линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя и определение величины модуля вектора магнитной индукции преобразованного поля, отличающийся тем, что, с целью повышения точности, ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с вертикальной плоскостью, содержащей вектор магнитной индукции, затем ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с направлением вектора магнитной индукции, после чего определяют углы между направлением вектора магнитной индукции и направлениями определяемых компонент.
Рисунки
Заявка
2793986/21, 18.07.1979
Ленинградское отделение Института земного магнетизма, ионосферы и распространения радиоволн АН СССР
Бледнов В. А
МПК / Метки
МПК: G01R 33/02, G01V 3/00
Метки: вектора, индукции, компонент, магнитной
Опубликовано: 27.09.1996
Код ссылки
<a href="https://patents.su/0-786537-sposob-opredeleniya-komponent-vektora-magnitnojj-indukcii.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения компонент вектора магнитной индукции</a>
Способ измерения компонента вектора магнитной индукции и устройство для его осуществления

Номер патента: 789930
Опубликовано: 23.12.1980
Автор: Бледнов
МПК: G01R 33/02, G01V 3/40
Метки: вектора, индукции, компонента, магнитной
...поверхностями второго порядка, при этом хотя бы одна полуось оболочки отличается по величине от двух других, а преобразователь подключен через второй измеритель к другому входу вычислителя.На фиг.1 приведена структурная схема устройства, реализующего предлагаемый способ измерения компонент вектора магнитной индукции; на фиг,2 - вектор магнитной индукции (ВМИ) Т; на фиг.З - результат преобразования ВМИ Т в ВМИ Т.Устройство содержит .преобразователь 1, соединенный через измеритель 2 с одним входом вычислителя 3. В замкнутую оболочку 4, соедине ную с системой ориентации 5, помещ второй преобразователь 6, который подключен через второй измеритель 7 к другому входу вычислителя 3.Компоненты ВМИ Т имеют значения Х, У, 2, Н= Х фУм Х =...
Способ определения компонент вектора магнитной индукции

Номер патента: 935836
Опубликовано: 15.06.1982
Автор: Бледнов
МПК: G01R 33/02
Метки: вектора, индукции, компонент, магнитной
...к работе. ля определяют отношение коэффициен- Для определения компонент ВМИ. тов экранирования и преобразования внешних магнитных полей определяют в точках, расположенных на направле- величину линейно преобразованного. ниях, совпадающих с направлениями поля и три величины суммарного магкомпонент вектора магнитной индук ф нитного поля, По результатам этих ции, а затем определяют суммарную измерений и знанию отношений коэффивеличину измеряемого магнитного поля циентов экранирования и преобразоваи собственного магнитного поля пре-ния рассчитывают компоненты ВМИ. обраэователя в одноименных точках. Рассмотрим частный случай.Способ реализуется с помощью В качестве преобразователя 1 исустройства, показанного на чертеже. пользуется шаровая...
Способ измерения индукции магнитного поля
Номер патента: 1420560
Опубликовано: 30.08.1988
МПК: G01R 33/06
Метки: индукции, магнитного, поля
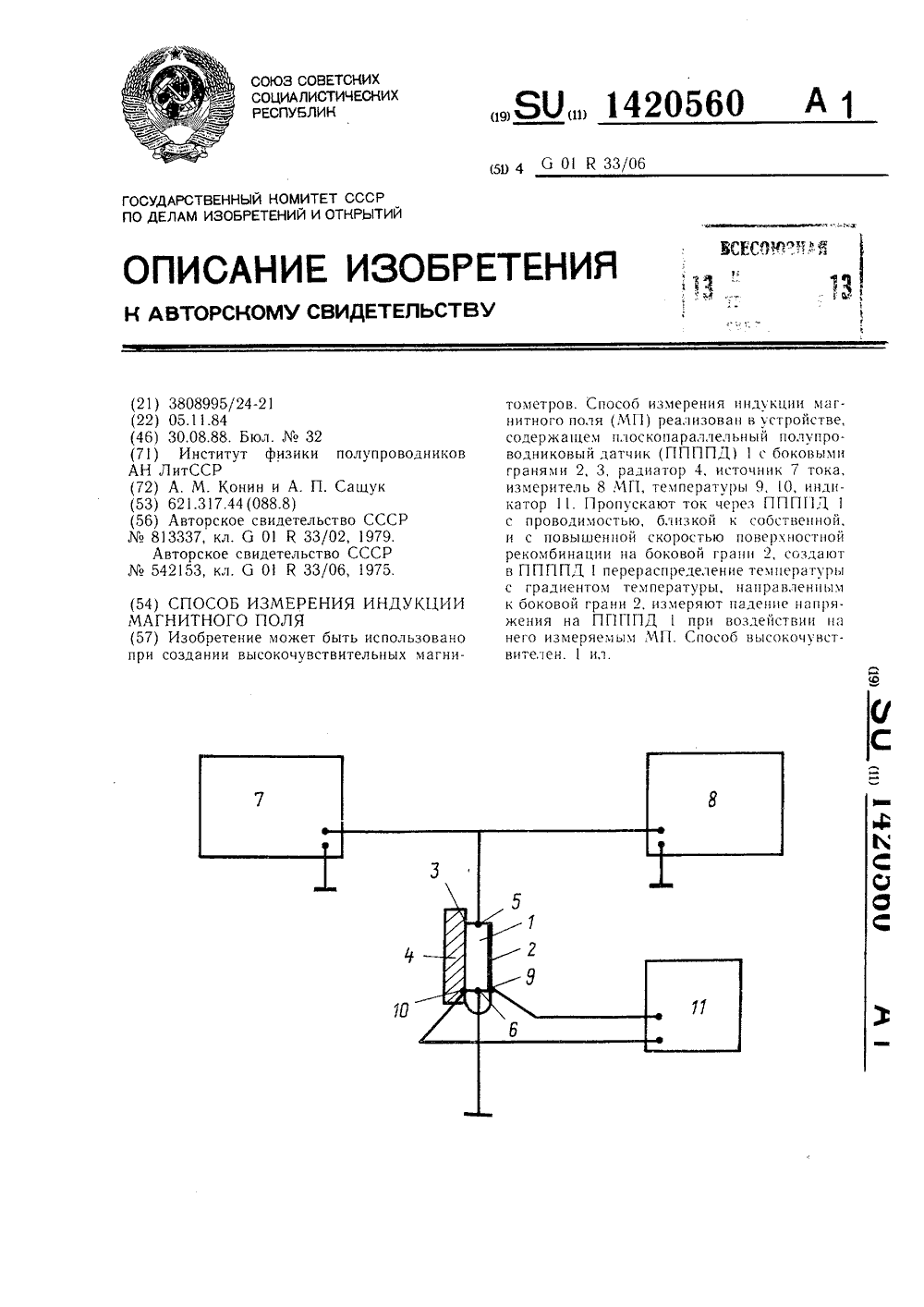
...приложено электрическое поле Е, имеющей область с повышенной скоростью поверхностной рекомбинации (СПР), на одной из боковых граней при наличии направленного к грани с повышенной СПР градиента температуры в магнитное поле происходит перераспределение концентрации носителей заряда по сечению образца. Данное перераспределение обусловлено как магнитным 20 полем, так и градиентом температуры.Относительное изменение проводимости в магнитном поле в этом случае следующее; лааРп яйи г (сйп - и яйисй он п+,Ро сЕ 7/ с ае еехй В.й.йе 3 а Ц т. (и +Рп о) ЬР=Рт - Р - разность концентрации дырок на гранях с температурой Т 2 и Т 1, З 0 а, - Х,фактор; ри р - подвижности электронов и дырок; по, Ро - равновесие концентрации электронов и дырок; О= - д/Х, Х...
Устройство для измерения вольт-амперных характеристик сильноточных сверхпроводников при разных значениях индукции магнитного поля и температуры
Номер патента: 1043754
Опубликовано: 23.09.1983
МПК: H01F 6/00, H01L 39/00
Метки: вольт-амперных, значениях, индукции, магнитного, поля, разных, сверхпроводников, сильноточных, температуры, характеристик
...обеспечить работу СПтрансформатора при температуре до18 К, поэтому первичная обмотка должна быть выполнена из материала наоснове сплавов ИЬЗЯп или 73 Са скритической температурой Тс = 18 К,который более хрупкий по сравнениюсо сплавом ХЬТ 1 с Т= 9 К. Для замены СП образца необходимо произвести разборку устройства, что приводит к дополнительным затратамвремени и потерям жидкого гелия,связанным с охлаждением криостата до Т = 4,2 К.Цель изобретения - расширениефункциональных йозможностей устройства и повышение точности измеренийпутем повышения точности регулирования температурыи увеличения диа-пазонавнешнего магнитного поля.Поставленная цель достигаетсятем, что устройство дополнительносодержит источник внешнего магнитного поля в виде...
Управляемый стабилизатор индукции магнитного поля электромагнита
Номер патента: 1393147
Опубликовано: 27.01.2002
Автор: Прохоров
МПК: G05F 7/00
Метки: индукции, магнитного, поля, стабилизатор, управляемый, электромагнита
Управляемый стабилизатор индукции магнитного поля электромагнита, содержащий усилитель мощности, выход которого соединен с выводами для подключения обмотки электромагнита, измерительный усилитель, вход которого подключен к выходу датчика магнитной индукции, два компаратора, инвертирующий вход первого из которых соединен с выходом источника опорного напряжения, а неинвертирующий вход - с выходом измерительного усилителя, отличающийся тем, что, с целью повышения КПД, в него введен накопительный конденсатор, а усилитель мощности выполнен по мостовой схеме с двумя управляемыми и двумя неуправляемыми вентильными плечами, причем накопительный конденсатор включен между питающими выводами усилителя...
Предыдущий патент: Устройство для определения рельефа и уровня поверхности материалов
Следующий патент: Способ получения веществ, обладающих противовоспалительным действием
Случайный патент: Импульсный генератор тока