Бортовое устройство коррекции уходов гироскопов относительно неизменных в инерционном пространстве направлений
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 151835
Автор: Гришин


Текст
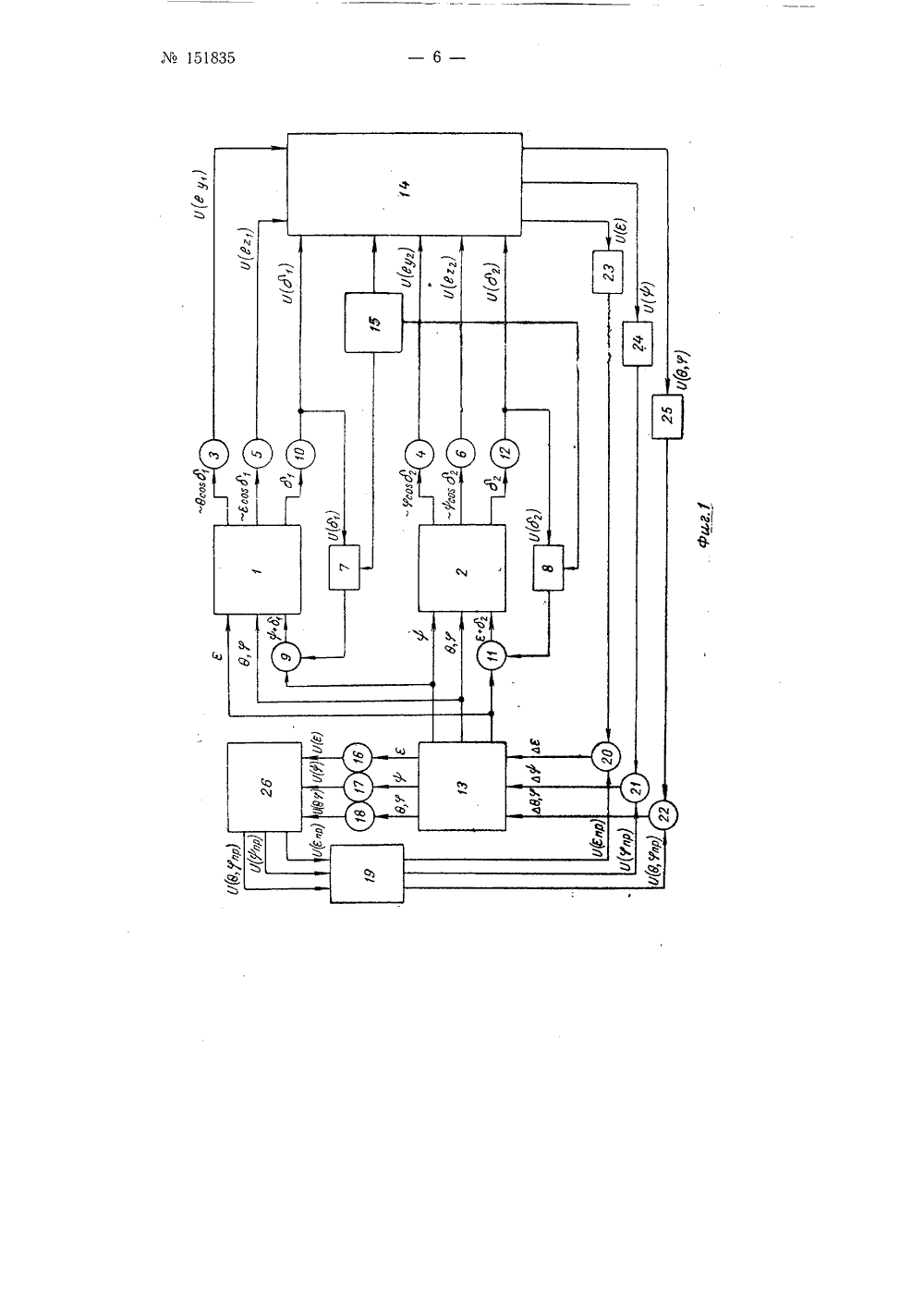
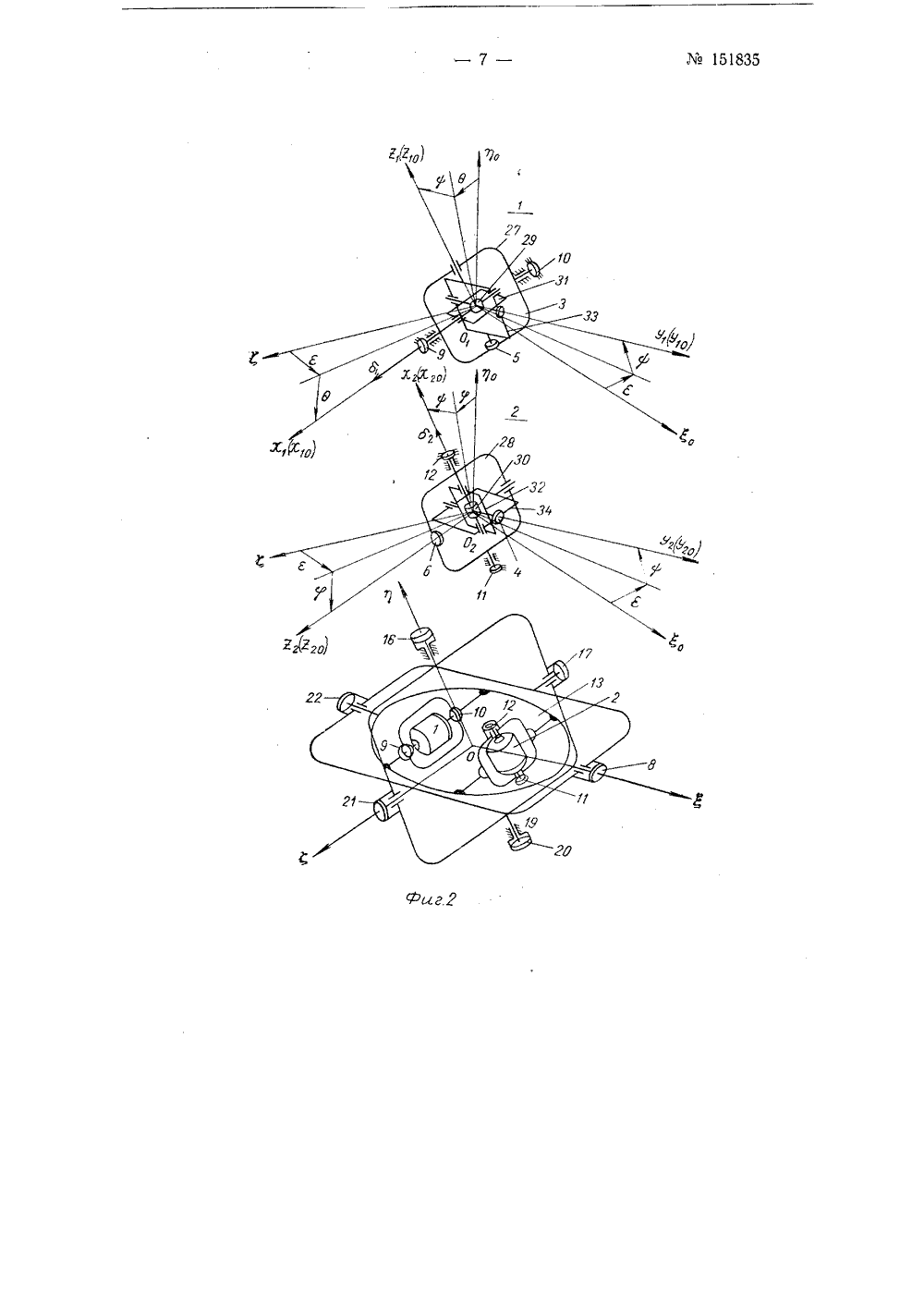
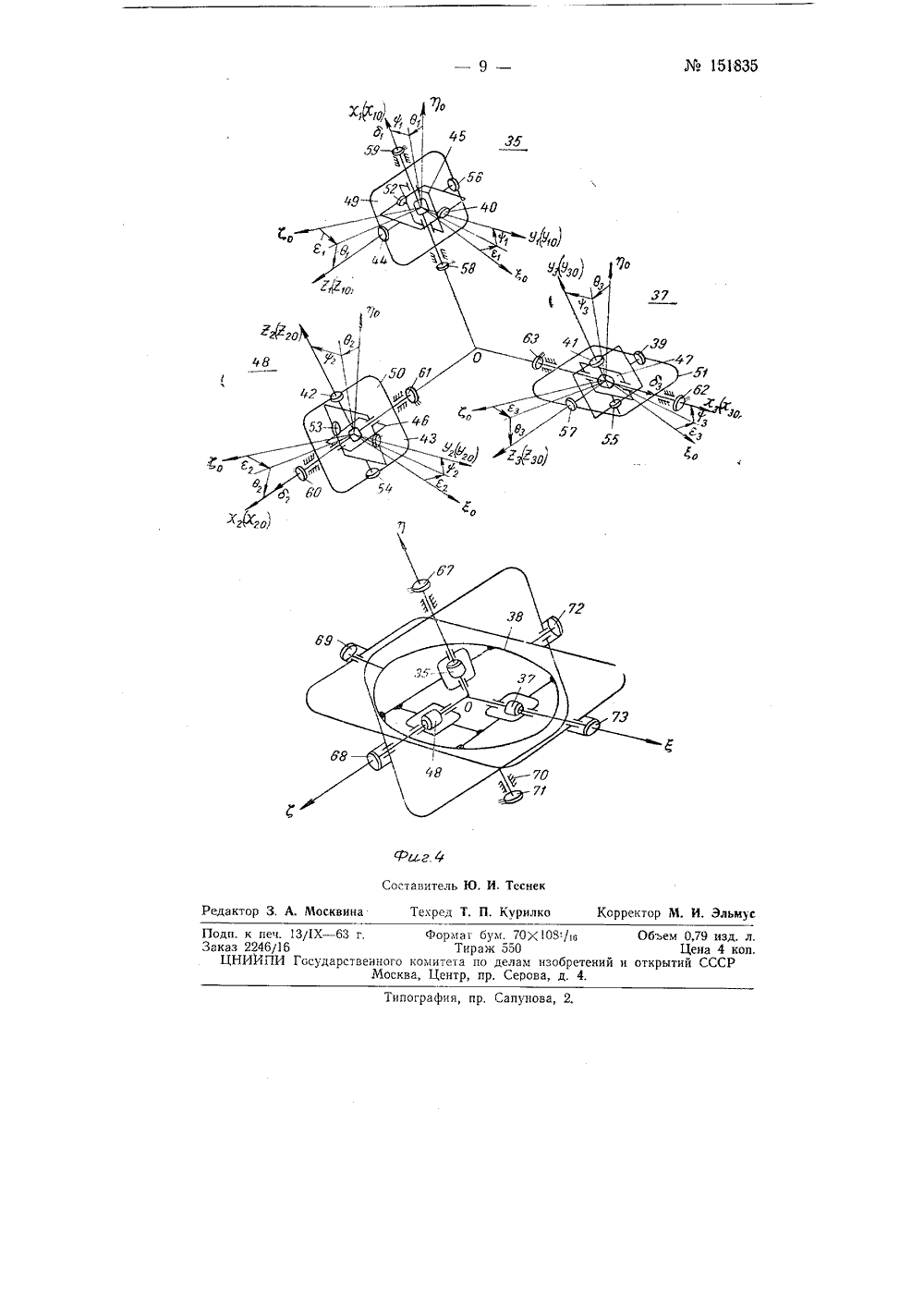
Класс 6 01 с; 42 с, 25;, 6 01 с; 42 с, 35,о15835 СССР САНИЕ ИЗОБРЕТЕНИЯВТОРСКОМУ СВИДЕТЕЛЬСТВУ одаисная групна1 бб С. Гришин ОРТОВОЕ УСТРОЙСТВО КОРРЕКЦИИ УХОДОВ СВОБОДНЫХ ГИРОСКОПОВ ОТНОСИТЕЛЬНО НЕИЗМЕННЫХ В ИНЕРЦИАЛЬНОМ ПРОСТРАНСТВЕ НАПРАВЛЕНИИЗаявлено омитет по делам и с при13 февраля 1962 г. за763871/26-10бретений и открытий при Совете Минединением заявки763872/26-10Бюллетене изобретений:22 за 196 истров ССС Опубликован Известна система гироскопов, в которых отсчет углового положения летательного аппарата производится не относительно оси отдельного гироскопа, а относительно осредненной оси системы гироскопов. В известной системе осуществлена взаимная коррекция осей отдельных гироскопов с помощью сигналов, вырабатываемых счетно-регистрирующими и счетно-решающими устройствами.Однако известные системы управления с использованием свободных гироскопов, особенно инерциальные системы дальней навигации, обладают существенным недостатком: невозможно бесконечно долго поддерживать заданные, направления в инерциальном пространстве изза уходов свободных гироскопов, т, е. отклонения с течением времени осей вращения роторов гироскопов от неизменных направлений инерциального пространства, вследствие наличия возмущающих движе.ние роторов моментов.Предлагаемое устройство отличается от известных тем, что в нем исключение ошибок уходов свободных гироскопов от целого ряда постоянно действующих факторов, таких, как дебаланс масс элементов гироскопа, заедание цапф подвеса, электромагнитное тяжение, осущес 1 вляется за счет поворотов корпусов гироскопов по определенной программе вокруг оси вращения ротора. К программному устройству подключено вычислительное устройство, связанное с моментными датчиками платформы. Это отличие обеспечивает автоматическое определение и компенсацию ошибок уходов свободных гироскопов и повышает точность управления летательных аппаратов.На фиг, 1 изображена функциональная схема предлагаемого устройства на двух гироскопах с преобразователем координат; ца фиг. 2 - упрощенная принципиальная схема системы двух свободных гироскоповна фиг. 3 - функциональная схема предлагаемого устройства на трех гироскопах с вычислительным устройством; на фиг, 4 - упрощенная принципиальная схема системы трех свободных гироскопов.Предлагаемое бортовое устройство коррекции уходов гироскопов относительно неизменных в инерциальном пространстве направлений содержит два свободных гироскопа 1 и 2, с датчиками д, 4, 5 и 6 измерительных осей О,У ОгЛ 1 о, О.,У О,Л., усилительно-преобразующие устройства 7 и 8 со следящими системами 9, 10, 11 и 12, обеспечивающими программные развороты. Система подвески платформы 13 объединена с системой ее стабилизации и управления, включающей преобразователь 14 координат, программное устройство 15, датчики 16, 17, 18 сигналов положения объекта 19 относительно платформы 13, следящие приводы 20, 21 и 22, усилительно-преобразующие устройства 23, 24, 25 и системы 26 управления объектом 19. Система свободных гироскопов 1 и 2, корпусы 27 и 28 которых относительно платформы 13 имеют одну степень свободы вокруг осей О,Х, ОХ, связана с платформой посредством следящих систем 9, 10, И, 12, позволяющих обеспечивать по командам из программного устройства 15 программные развороты гироскопов относительно исходных положений на углы б, =180. Инерциальная система координат обозначена буквами Оьа, во, то, 9, система координат, связанная с платформой13, - Овт.В арретированном состоянии направления осей О,Х О,Х, вращения роторов 29 и 30 гироскопов 1 и 2 совпадают с направлениями осей ОХО, ОХО вращения их корпусов. При этом направление осей, О У 012 О У, и ОЯ, связанных с внутренними и внешними рамками 31 и 32; 33 и 34 совпадает с соответствующими осями ОУ 1 О, ОЛ 1 О, ОгУ.О и ОЪ, корпусов гироскопов и с датчиков д, 4, 5, б снимаются нулевые сигналы.В разарретированном состоянии, в момент времени 1 включаетсч система стабилизации платформы 13 от датчиков 8, 5, 6. Через определенные интервалы времени Л 11=1 - 1, по команде из программного устройства 15 корпус 28 гироскопа 2 разворачивается следящей системой 11, 12 вокруг оси ОХ, на угол б.,= 180 и фиксируется в этом положении. Одновременно с началом разворота гироскопа 2 включается в работу преобразователь 14 координат, обеспечивающий необходимое соотношение сигналов с датчиков 4 и 6 гироскопа. Преобразователь 14 координат, в режимах программных разворотов гироскопов, обеспечивает формирование сигналов в системе стабилизации платформы, согласно следующим зависимостям:У( а ) = У(е) сов с, - с 1 (е 1 ч) з 1 п о,;С/(0) = с 1(е, ) сов, + с 1(е) з 1 пУ(-") = 1/(е) сов ., -У(е, ) з 1 пУ = У(ег) сов о - 11(е,) з 1 п)де: (1(в), Ь(О), 11(с), (1(ф) - функции углов, определяющих в разарретированном состоянии положения систем координат О,Х,У,Л151835О,Х,У 222 относительно систем координат 01 Х 10 У 10710, и 02 Х 20 У 20220,11(еу,), l(еу,), l(ег,) с 1(е, ) - функции сигналов датчиков 3, 4, 5 и б.По окончании разворота в момент фиксации гироскопа 2 преобразователь 14 координат выключается из работы.В момент времени 12=1+Л 1 по команде из программного устрой. ства 15 корпус гироскопа 1 разворачивается следящей системой 9, 10 вокруг оси 01 Х 10 на угол 61=180 и фиксируется в этом положении, Одновременно с началом разворота гироскопа 1,включается преобразователь 14 координат сигналов с датчиков 3, 5.По окончании разворота в момент фиксации гироскопа 1 преобразователь 14 координат отключается от системы стабилизации платформы 13.В дальнейшем периодически, через равные интервалы времени Л 1; =Ы 1 циклы последовательных . разворотов гироскопов 1 и 2 на углы 6, = ( - 1)1180 (гдето = 1, 2, 3 и - циклы программных поворотов) повторяются.Устройство может быть построено и без преобразователя 14 координат, однако при этом необходимо введение третьего гироскопа 35 и вычислительного устройства Зб для определения и компенсации постоянных составляющих ошибок ухода свободных гироскопов, Вычислительное устройство Зб вырабатывает сигналы, величина которых пропорциональна моментам, вызывающим эти уходы.При,наличии трех свободных гироскопов устройство функционирует следующим образом.В момент времени 1 о разарретируются гироскопы 35, 37, 48, включается система стабилизации платформы 38 от датчиков 39, 40, 41. Одновременно с разарретированием гироскопов 35 и 37 в вычислительном УстРойстве Зб фиксиРУютсЯ показаниЯ фзо, Ои, взо в 20, 02 о, ф 10 датчиков 39, 40, 41, 42, 43, 44 (где: О,в,ф имеют те же значения, что и в случае устройства с двумя свободными гироскопами 1 и 2, с той лишь разницей, что в данном слулае рассматриваются три системы координат О 1 Х 1 У 1 Е 1, О 2 Х 2 У 2 Л 2, О 3 ХзузЛ 3, связанные с внутрен ними рамками 45, 4 б, 47 гироскопов 35, 37 и 48 и три системы координат О 10 Х 10 у 1 ОГ 10, О 20 Х 20 у 20720, ОООХзоузотзо, связанные с корпусами 49, 50, 51 тех же гироскопов). Через определенные интервалы времени Л 11=11 - 10 производятся новые измерения и фиксация в вычислительном устройстве Зб углов поворота е 21, в 31, 011, 01, ф 11, фц. По полученным результатам в вычислительном устройстве Зб вычисляются и фиксируются параметры:Д О= Д Е - Д Е 2, = (О - О) - (Е 2, - О,);31 э 31 21 ( 31 30) (21 020)Одновременно с фиксированием результатов измерений в моме.л времени 11 включается следующая система программного разворота гироскопа 48 вокруг оси 02 Х 2, на угол до= 180, По окончании разворота и фиксации гироскопа 48 в момент начала новых измерений 11 в вычислительном устройстве Зб снова фиксируются величины углов в 21, 31, 611, О 21, ф 11, ф 31, Через интервал времени Л 12=12 - 11 произво"31 з332 еж .гР -1-ы) 1,-.)011 е, - Ь 612 е2(Ы, +Ы,) Д е - 31 "21 + 32 322(Ь +Ы) Ь 9, 1 Щ +12 Еи2(Ы 1+Л ) Полученные значения средних величин скоростей уходов гироскопов 35, 37, 48 используются затем для коррекции производящихся в вычислительном устройстве Зб основной системы вычислений и активной компенсации ошибок ухода, с целью повышения точности дальнейшей работы гироскопов 35, 37, 48.Одновременно с фиксированием результатов измерений в момент времени 12 производится переключение в системе стабилизации платформы 38 с датчика 40 на датчик 43 и затем производится программный разворот гироскопа 35 вокруг оси О 1 Х 10 на угол 61=180 и фиксация его в этом положении.В момент окончания разворота 2 измеряются и фиксируются параметры в 22, е 32, О 12, О 221 4 12, Ф ззЧерез интервал времени Л 13=13 - 1 снова измеряются и фикси- РУютсЯ паРаметРы езз, езз, 013, Озз, Ф 13, Фзз, согласно котоРым вычисля 1 отся величины: ь О 13 о 23 = ь о - ьо, = (Оьз - О) - (Оз, - О,); ззз 323 =ззз3 з = (ззз 3 32) (3 з - 22)1 133 13 133 13 (зз32) (1312) и величины средних скоростейМ, 3=М+М101 е - 1013 е2 (Ь+. Ь 13) уходов гироскопов за время 932 ,. -ЗЗ 3 лЬС 032 + 2 (Ы, + Ь.13) 12 Е,+ 013 Е,СР 22 2 РПо полученным данным в вычислительном устройстве 36 вычисляются также средние величины уходов гироскопов 35, 37, 48 за время цикла измерений и формируюгся корректирующие импульсы моментов, с учетом естественной коррекции уходов гироскопов 35, 37, 48 при разворотах, согласно равенсгвам:ЬО, =ЬО Ьи,+,+ 13)+ - А; На основании вычисленных параметров Ь 011 е, Ь 331 Ьф 31, Ь 612 е, Ьззз Ьфззв вычислительном устройстве 3 б вычисляются средние величины скоростей уходов свободных гироскопов 35, 37, 48 на интервале времени Мз=Л 11+Мз, согласно следующим зависимостямм:1518351 Ср 2 ОСР 2 ( 1 2 3) + Р 11Ь , Ь,Д 1,+11 +Ы)+ Я" ср ь -ср. Р.3) + р 1.Кср = ;срР+г. -) - р 1В момент времени 1 производигся переключение датчиков с 39 на 44 и с 41 на 42 в системе стабилизации платформы 38 и производится программный разворот гироскопа 37 вокруг оси ОЗХ.на угол б. .=130,По окончании разворота гироскопа 37 вычислительным устройством 36 производится коррекция положения измерительных осей гироскопов 35, 37, 48 соответственно вычисленным в вычислительном устройстве 36 углам ЛО ЬОЬ:,Р,Ья,рз, с, ,сц путем подачи сформированных импульсов на моментные датчики 52, 53, 54, 55, 56, 57 и компенсацию вычисленных величин средних уходов гироскопов путем приложения постоянных компенсационных моментов, пропорциональных ЬО р Оср- Ьь рь яср: Мср фср на тех же моментных датчиках.По окончании коррекции,в момент времени 1 измеряются и фиксируются параметры е з, язз, Ои, О , Ф з Ф ззЧерез интервал Л 1=1 - 1, снова измеряются и фиксируются параметры еч, ез 4, 0, О, фь фи, согласно которым вычисляются величины Лвроз,Ьяср) Ьрз ррЬсср ) р о,В дальнейшем циклы повторяются в соответствии с описанной выше логической схемой разворотов гироскопов на углы о, =- ( - 1)-180 посредством следящих систем 58, 59, 60, 61, 62, 63. Так же, как и в случае устройства на двух свободных гироскопах 1 и 2, данное устройство содержит усилительно-преобразующие устройства 64, 65, 66, датчики 67, 68, 69 сигналов положения объекта 70, следящие приводы 71, 72; 73 и систему управления 74 объектом 70.Предмет изобретения1. Бортовое устройство коррекции уходов свободных гироскопов относительно неизменных в инерциальном пространстве направлений, содержащее несколько свободных гироскопов с датчиками измерительных осей, усилительное устройство, систему подвески платформы, объединенную с системой стабилизации и управления, о т л и ч а юще е с я тем, что, с целью повышения точности поддержания курса летательных аппаратов, в систему управления устройством включено программное устройство, осуществляющее поворот корпусов гироскопов вокруг оси вращения ротора на углы б;=( - 1) -180, где г=1, 2, 3, п - циклы программных поворотов,2. Усгройство по п. 1, отличающееся тем, что, с целью автоматической компенсации постоянных составляющих ошибок ухода свободных гироскопов, к программному устройству подключено вычислительное устройство, связанное с моментными датчиками платформы.151835 ФРыг. Фставитель Ю. И. Теснек Редактор 3. А, Москвина Текред Т. П, Курилко Корректор М, И. Эльмус По Зак пография, пр, Сапунова,к печ. 13/1 Х - 63 г.2246/16ИИПИ ГосударственногМос Формат бум 70 ХТираж 550 комитета по делам а, Центр, пр. Серо 03/ы Объем 0,79 нзд. лЦена 4 копзобретений и открытий СССР
СмотретьЗаявка
763871, 13.02.1962
Гришин А. С
МПК / Метки
МПК: G01C 19/30
Метки: бортовое, гироскопов, инерционном, коррекции, направлений, неизменных, относительно, пространстве, уходов
Опубликовано: 01.01.1962
Код ссылки
<a href="https://patents.su/9-151835-bortovoe-ustrojjstvo-korrekcii-ukhodov-giroskopov-otnositelno-neizmennykh-v-inercionnom-prostranstve-napravlenijj.html" target="_blank" rel="follow" title="База патентов СССР">Бортовое устройство коррекции уходов гироскопов относительно неизменных в инерционном пространстве направлений</a>
Способ определения моментов относительно оси подвеса двухстепенного гироскопа

Номер патента: 1840342
Опубликовано: 27.06.2007
Автор: Румянцев
МПК: G01C 19/00, G01C 25/00
Метки: гироскопа, двухстепенного, моментов, оси, относительно, подвеса
Способ определения моментов относительно оси подвеса двухстепенного гироскопа по а.с. №1840626, отличающийся тем, что с целью повышения точности, производят измерение моментов в тех же положениях при отсутствии внешней вибрации, а также в четырех иных положениях, расположенных в той же плоскости и смещенных относительно исходных положений на 45°.
Способ определения моментов относительно оси подвеса двухступенного гироскопа с шарикоподшипниковым подвесом

Номер патента: 1840626
Опубликовано: 27.06.2007
Автор: Румянцев
МПК: G01C 25/00
Метки: гироскопа, двухступенного, моментов, оси, относительно, подвеса, подвесом, шарикоподшипниковым
Способ определения моментов относительно оси подвеса двухстепенного гироскопа с шарикоподшипниковым подвесом, вызванных его неравножесткостью, основанный на определении суммарных моментов, действующих относительно горизонтальной оси подвеса, отличающийся тем, что с целью повышения точности определения, устанавливают гироскоп на основание, вибрирующее в направлении вертикали моста, измеряют мосты, действующие относительно оси подвеса при четырех положениях оси ротора, отличных от направления вибрации на угол 45°, при не менее чем двух значениях виброперегрузки, превышающих единицу, определяют для каждой перегрузки значения суммарного момента и методом наименьших квадратов вычисляют искомую величину.
Приемное устройство системы телемеханики

Номер патента: 596996
Опубликовано: 05.03.1978
МПК: G08C 15/06
Метки: приемное, системы, телемеханики
...кода, описываюшего состояние входов 37 атого периферийного устройства 1. Прием этого сообщения блоком первичной обработки вызывает появление соответствующего сигнала на его выходе 26, пере вод вединичное состояние соответствуюшего индикатора в регистре 8 и запуск блока 7 управления, после чего блоком перви щой обработки через блок 6 сопряжения в линию 3 связи генерируется "единяпый "коц, вызывающий повторную передачу сообщения от того же периферийного устройства 1. При совпадении первого и второго сообщения блоком первичной обработки на выходе 26формируется повторный сигнал, вызываюшийиндикацию возникшей ситуации блоком 9оконечного преобразования уже описаннымвыше образом,Если в тот момент, когда оперяторомосушествляется прием...
Устройство измерения угла поворота оси гироскопа

Номер патента: 726425
Опубликовано: 05.04.1980
МПК: G01C 19/38
Метки: гироскопа, оси, поворота, угла
...генератор пилообразного напряжения, причем вход уп- равляемого генератора пилообразного напряжения связан с выходом одного из фотоприемников, а выход его через блоквыделения постоянной составляющей пилсь 25образного напряжения подключен к управляющему входу масштабного генератора.На фиг, 1 изображена принципиальнаясхема устройства; на фиг. 2 - диаграммыАиБ,Устройство содержит гидромотор 1 сзеркальным клином 2, автоколлиматор 3,включающий фотоприемники 4 и 5, расположенные в фокусе объектива 6, попеременно засвечиваемые источником света7 и подсоединенные к триггеру 8, Выходы триггера 8 соединены с двумя входами реверсивного счетчика 9, на третийвход которого поступают импульсы с масштабного генератора 10. К масштабномугенератору через...
Радиоинтерферометрическое устройство для определения относительных координат космических аппаратов

Номер патента: 1768979
Опубликовано: 15.10.1992
МПК: G01C 21/24, G06F 15/32
Метки: аппаратов, координат, космических, относительных, радиоинтерферометрическое
...одном пункте приема), ограничиваются по амплитуде и поступают в блоки 4 и 5 фильтрации сигналов. Помимо принятых сигналов от космических аппаратов в блоки фильтрации сигналов вводятся также секундные метки и синусоидальный сигнал от местного стандарта частоты и времени.В блоках фильтрации сигналов (4 и 5) осуществляется узкополосная фильтрация сигнала от каждого космического аппарата. Сигналы с выходов блоков фильтрации сигналов подвергаются Фурье-преобразованию в блоках 7 - 10 и через блок памяти 11 передаются в центр обработки 12.Затем эти данные передаются по простейшей линии связи (например, по телефонному каналу) в центр 12 обработки, 1768979В центре обработки после вычитания данных зарегистрированных в различных пунктах приема,...
Предыдущий патент: Устройство для автоматического контроля геометрических параметров изделия
Следующий патент: Сигнализатор волн цунами
Случайный патент: Лущильный станок