Устройство для определения положения объекта на изображении
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
Изобретение относится к областиавтоматики, в частности к устройствудля определения положения объекта наизображении и может быть использовано 5в системах распознавания и совмещения изображений движущихся объектов.Цель изобретения состоит в повыше нии точности и упрощении устройства.На фиг.1 представлена блок-схема 10устройства; на фиг.2 - пример конструктивного выполнения коррелятора;на фиг.3 - то же, блока определениякоординат," на фиг.4 - то же, блокавременного сглаживания; на фиг.5 - 15то же, блока управления; на фиг.6-11 -временные диаграммы управляющих сигналов, поясняющие работу сигнала,Устройство (фиг, 1) содержит первыйблок 1 памяти, блок 2 временного сглаживания, коммутатор 3, блок 4 управления, второй блок 5 памяти; коррелятор 6, блок 7 определения координат.Коррелятор 6 (фиг.2) содержит вычитатель 8, блок 9 постоянной памяти,25сумматор 10 и регистр 11,Блок 7 определения координат(фиг,4) содержит блоки 19,20 постоянной памяти, умножители 21, 22, сумматор 23, регистр 24, коммутатор 25и блок 26 оперативной памяти.Блок 4 управления (фиг.5) содержитсхему ИЛИ 27, счетчик 28, триггер 29,блок 30 постоянной памяти, инвертор31, вентили 32, 33, коммутаторы 34,35, сумматоры 36, 37, коммутаторы38-40,На фиг.6-1 1 приведены временныедиаграммы управляющих сигналов, поясняющие работу устройства.При составлении временных диаграмм.45считалось, что текущее иэображениеимеет размерность 8 х 8 точек, а эталонное изображение - 4 х 4 точекПредлагаемое устройство работает следующим образом.На вход блока 1 памяти текущего50изображения поступает сигнал текущего,телевизионного изображения. Периодобработки этого сигнала устройствомможно разделить на несколько этапов(фиг.б).1. Запись текущего телевизионногоизображения в блок 1 памяти текущегоизображения 1. 2. Определение координат объекта на текущем телевизионном изображении в корреляторе 6 и блоке 7 определения координат.3. Межкадровое сглаживание изображения объекта в блоке 2 временного сглаживания.4Обновление эталонного иэображения в блоке 5 памяти эталонного изображения.Рассмотрим работу устройства на каждом из этих этапов.На вход блока 1 памяти поступает сигнал текущего телевизионного изоб-ражения, Одновременно на вход блока управления поступает внешний управляющий сигнал У 6-5, необходимый для синхронизации процесса записи в блок 1 (фиг.5),Первые шесть разрядов этого сигнала являются сигналами адреса, а седьмой разряд - сигналом записи. Внешний управляющий сигнал У 6-6, поступающий одновременно с сигналом У 6-5, обеспечивает прохождение сигнала У 6-5 через коммутаторы 38-40 блока 4 управления на управляющий вход блока 1 памяти. Ра" бота устройства на этом этапе поясняется диаграммой управляющих сигналов, приведенной на фиг.7.На втором этапе на входы коррелятора 6 поступают значения текущего и эталонного изображения из блоков 1 и 5 соответственно. В блоке 6 реализуется разностный корреляционно-экстремальный алгоритм. На вход вычитателя 8 поступают значения элементов текущего и эталонного иэображений, Вычитатель 8 вычисляет разность, значение которой поступает на вход блока 9 памяти, с помощью которого вычисляется модуль этой разности, На сумматоре 10 и регистре 11 ор-ганизован накапливающий сумматор, который перед началом вычисления обнуляется сигналом У 4-1 (фиг.9). Сигнал У 4-2 является сигналом записи в регистр 11. Вычисленное значение поступает в блок 7 определения координат, где определяется минимальная величинасреди всех значений. Текущее значение поступает на вход вычитателя 15. На его второй вход поступает текущее значение минимума, хранящееся в регистре 12. Если содержимое регистра 12 оказывается больше нового значения, то знак их разности, вычисленной на вычитателе 15, будет равен" 1", которая поступает на вентиль 17и разрешает прохождение сигнала У 5-2на входы записи регистров 12 и 13.В результате в регистр 12 запишетсяновое значение текущего минимума,а в регистре 13 - значения, соответствующие этому минимуму и поступающие в блок 7 из блока 4 управления(сигнал У 5-3), По окончании вычислений в регистре 13 хранятся значения,соответствующие положению объектана изображении. Эти значения поступают в блок 4 управления, где использу-ются при выборе участка текущего 15изображения объекта, поступающего насглаживание в блок 2; Для выдачи навыход устройства вычисленные значения координат объекта преобразуютсяв другую систему координат, в которой 20координаты 1. объекта равны О, еслиобъект находится в центре текущегокадра, Для этого значения поступаютна вычитатель 16, на второй вход которого поступают координаты центра 25текущего изображения, записанные вблоке 18 постоянной памяти. Вычисленные значения записываются в регистр 14сигналом У 5-4 и поступают на выходустройства. 30На третьем этапе в блоке 2 производится сглаживание изображенияобъекта. Сглаженное изображение объекта представляет собой сумму большогочисла изображений объекта, взятыхс монотонно убывающим весом. Так каккаждое изображение объекта взятоиз соответствующего кадра относительно найденных в нем координат объекта, то суммирование изображений . 40объекта приведет к уменьшению дисперсии аддитивной некоррелированнойпомехи. Другим положительным следствием данного межкадрового сглаживания является сглаживание ошибокдискретизации и квантования, такжеискажающих изображение объекта,На вход блока 2 поступают значенияэлементов участка текущего кадра,взятого относительно найденных координат объекта. Выбор соответствующего участка текущего кадра обеспечивается с помощью блока 4 управления.Значения координат объекта в текущемкадре (сигнал У 8) поступают из блока 7 определения координат в блок 455управления, Значения сигнала У 8 проходят через коммутаторы 34, 35, насумматоры 36, 37, на вторые входы которых поступает сигнал ДЗ иэ блока 30 . постоянной памяти, На выходах сумматоров образуются сигналы адреса блока памяти текущего изображения, которые через коммутаторы 38-40 поступают в блок 1 (фиг.10). На умножителе 22 производится умножение значения элемента текущего изображения на соответствующий коэффициент, поступающий из блока 20 постоянной памяти. На сумматоре 23 вычисляется итоговое значение, которое записывается в регистр 24 сигналом У 2-1 (фиг.10). Вычисленное значение через коммутатор 25 поступает на вход блока 26 оперативной памяти и записывается там, При этом первые 4 разряда сигнала У 2-3 являются сигналами адреса а пятый разряд - сигналом записи- считывания.В предлагаемом устройстве производится смена эталонного изображения в каждом телевизионном кадре, и в качестве нового эталона выбирается текущее значение сглаженного изображения, Для этого производится последовательное считывание элементов сглаженного изображения из блока 2 временного сглаживания и запись и в блок памяти эталонного изображения (фиг.11). Первые четыре разряда сигналов У 2-3 и У 3 являются сигналами адреса, а пятые разряды - сигналами записи-считывания. Характерной особенностью алгоритма межкадрового сглаживания является то, что изображения объекта, взятые из различных кадров, входят в сглаженный сигнал с разными весами, причем с наибольшими весами в сглаженный сигнал входят изображения последних кадров,Работа устройства на всех этапах вычислений синхронизируется блоком 4 управления, а также внешними синхронизирующими сигналами. На счетчик 28 блока 4 управления поступает тактовая последовательность прямоугольных импульсов У 6-3, Сигнал У 6-4 является внешним сигналом запуска устройства. Если сигнал У 6-4 равен "1", та счетчик 28 удерживается в нулевом состоянии и устройство не работает, Если сигнал У 6-4 равен "0", то устройство начинает свою работу Счетчик 28 под воздействием тактовых импульсов У 6-3 вырабатывает адрес блока 30 постоянной памяти, в котором записаны все управляющие сигналы, Число разрядовв блоке 30 постоянной памяти равно числу управляющих сигналов устройст-ва, а число ячеек памяти в каждом разряде определяется периодом работы всего устройства, поделенным на длительность одного такта вычислений.В первом цикле вычислений выполняются только 1, 3 и 4 этапы. Во время первого кадра производится начальная запись эталонного изображения в блок 5 и начальная установка сгла женного изображения в блоке 2. Для обеспечения этого режима работы устройства на его вход поступает сигнал У 6-1 (фиг.6), устанавливающий триггер 29 в единичное состояние. Перед началом работы триггер 29 должен быть обнулен путем подачи сигнала У 6-2. После прихода сигнала У 6-1 триг.20 гер 29 находится в единичном состоянии дс тех пор, пока и конце первого кадра из блока 30 постоянной памяти не поступит сигнал Д 1, переводящий триггер 29 в нулевое состояние, 25 В этом состоянии триггер 29 находится во время всех последующих вычислений, Наличие триггера 29 позволяет сформировать управляющие сигналы У 2-2, У 7, необходимые только в первом кадре, а также блокировать прохождение сигналов У 4, У 5 на блоки 6, 7 устройства, которые во время первого кадра не работают. Сигнал Д 4 с выхода триггера 29 в качестве адресного сигнала поступает также в блок 30 постоянной памяти, обеспечивая Формирование в первом кадре соответствующих управляющих сигналов У 5-3 и ДЗ, используемых на этапах 3 и 4. В последующих кадрахсигнал Д 4 равен "0", и .сигналы У 5-3 и Д 3 примут другие значения, чем в первом кадре, так как считываются из другой области блока 30 постоянной памяти.В качестве исходного эталонного изображения может быть выбрано как специально сформированное изображение объекта, так и текущее телевизионное изображение объекта, Оно поступает на вход устройства и записывается в блоке 1 памяти текущего изображения. Так как эталонное изображение имеет меньшие размеры; чем текущее телевизионное изображение, то при начальной записи эталона искомое изображение объекта записывается в центральную часть матрицы блока 1 памяти текущего изображения. В дальнейшем из блока 1 считывается центральная часть записанного там изображения, содержащая искомый объект, На 3 этапе оно запоминается в блоке 26 оперативной памяти блока 2 временного сглаживания в качестве исходного сглаженного изображения Это обеспечивается подачей сигнала У 2-2 на коммутатор 25 и сигнала У 2-3 на блок 26 оперативной памяти (фиг.8). На этапе 4 производится запись исходного эталонного изображения. Для этого считывается центральная часть изображения из блока 1, которая запоминается в блоке 5 памяти эталонного иэображения (фиг.8), Начиная с второго кадра устройство функционирует в обычном режиме, выполняя все этапы вычислений (фиг,6).Предлагаемое устройство позволяет повысить точность определения координат объекта, так как в качестве эталонного изображения при его смене используется не текущее изображение объекта а сглаженное изображение, на котором сигнал от объекта отфильтрован от искажающих его аддитивных шумов.Форрула изобретенияУстройство для определения положения объекта на изображении, содержащее первый блок памяти, информационный вход которого является информационным входом устройства, управляющий вход блока памяти подключен к первому выходу блока управления, а выход соединен с,одним информационным входом коммутатора, другой информационный вход которого подключен к выходу блока временного сглаживания, управляю" щий вход которого соединен с вторым выходом блока управления, второй блок памяти, информационный вход которого подключен к выходу коммутатора, управляющий вход соединен с третьим выходом блока управления, а выход подключен к первому информационному входу коррелятора, выход которого соединен с информационным входом блока определения координат, один выход которого подключен к информационному входу блока управления, о т л и ч аю щ е е с я тем, что, с целью повышения точности и упрощения устройства, выход первого блока памяти соединен с другим информационным входом коррелятора, управляющий вход которо 1427396го подключен к четвертому выходу блока управления и к информационномувходу блока временного сглаживания,пятый выход блока управления соединен с управляющим входом коммутатора,а шестой выход блока управления подключен к управляющему входу блока определения координат, выход которогоявляется информационным выходом устройства, при этом вход эапуска блокауправления является синхрониэирующимвходом устройства.427396 УЯ Сост ель А.Р , Ходани в орректор М Демчик едактор О.Спесивых е Тираж 70 1 ПИ Государствен по делам изобрет Москва, Ж, Пого комитета СССний и открытийаушская наб., д,зказ 4854/46В о 4/ 303 оектная, 4 оизводственно-полиграфическое предприятие, г. Ужгород, ул 1 р Д 3 39 фр Хр У 7 1 р ф ф р гр Лр 4 р ф 6 р й в гр ф 4 р lр ф Юр 4 р Юр Ер 7 р ф ф др 4 р Э
СмотретьЗаявка
4210544, 16.03.1987
РЯЗАНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
АЛПАТОВ БОРИС АЛЕКСЕЕВИЧ, СЕЛЯЕВ АЛЕКСАНДР АНАТОЛЬЕВИЧ, ХЛУДОВ СЕРГЕЙ ЮРЬЕВИЧ
МПК / Метки
МПК: G06K 9/36
Метки: изображении, объекта, положения
Опубликовано: 30.09.1988
Код ссылки
<a href="https://patents.su/9-1427396-ustrojjstvo-dlya-opredeleniya-polozheniya-obekta-na-izobrazhenii.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для определения положения объекта на изображении</a>
Устройство для контроля блоков памяти

Номер патента: 862239
Опубликовано: 07.09.1981
Автор: Булычев
МПК: G11C 29/00
...1 не выдает импульса обращения на выход 3 устройства и на вход делителя частоты 4, регистр адреса 5 и формирователь 7 выдают начальные коды на информационный вход 9 поступает из контролируемого блока памяти начальный код, триггер 11 установлен в единичное состояние, счетчик 13 - в нулевое состояние (цепи установки устройства в исходное состояние на чертеже не показаны) .На время контроля всего массива проверяемого блока памяти подается на управляющий вход 2 устройства импульс запуска, по которому генератор импульсов 1 выдает импульсные сигналь 1, которые поступают на выход 3 и используются в качестве импульсов обращения к проверяемому блоку памяти, и одновременно через делитель частоты 4 на вход 6 регистра адреса 5, работающего в...
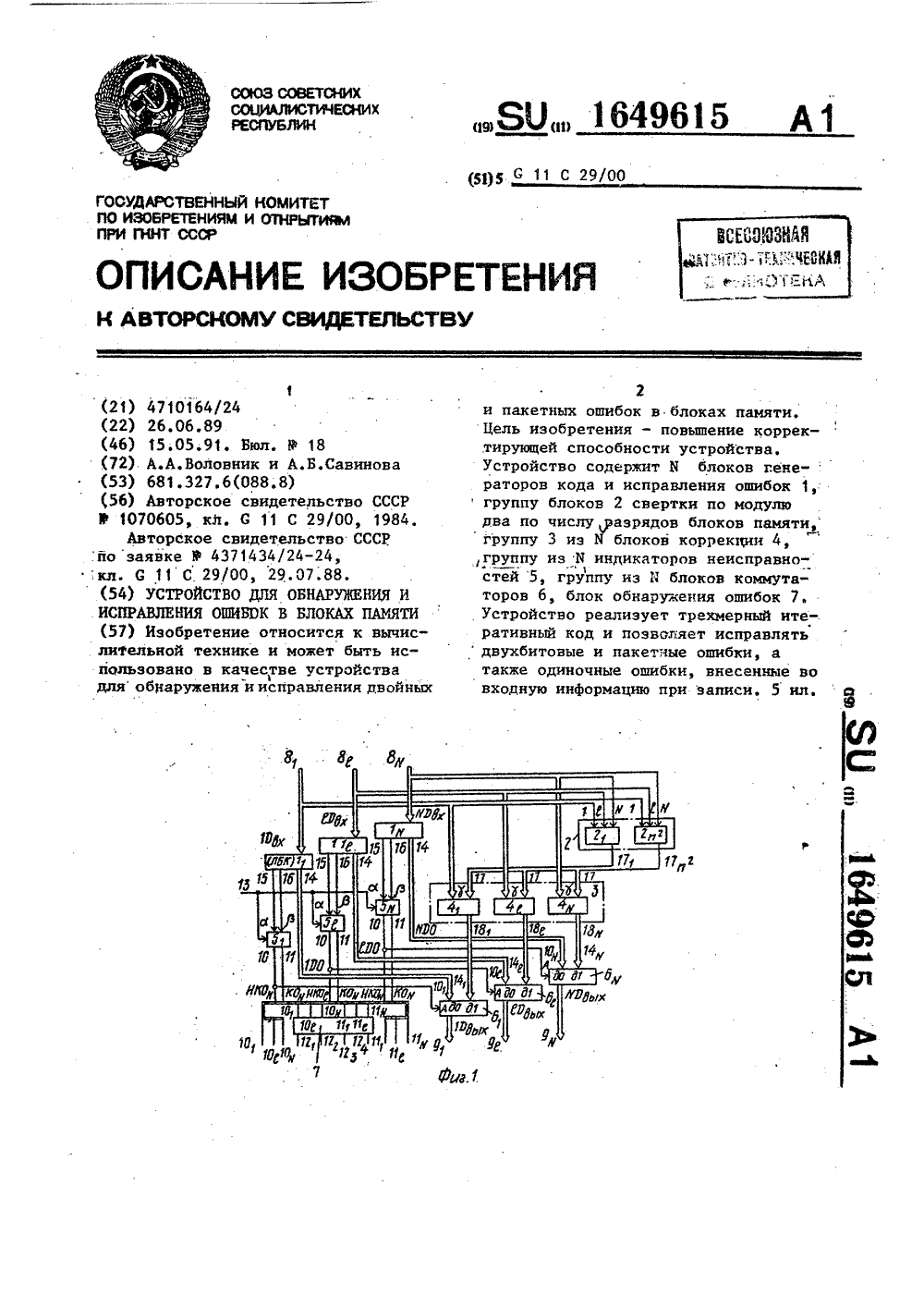
Устройство для обнаружения и исправления ошибок в блоках памяти
Номер патента: 1649615
Опубликовано: 15.05.1991
МПК: G11C 29/00
Метки: блоках, исправления, обнаружения, ошибок, памяти
...разрядов 1 а 3. и 1 Ъ,1 (1 = 1-М; х, 1 = 1-и)двух проверочных плоскостей ь и Вкодовой матрицы трехмерного кода(Фиг.3) и происходит в два этапа.В режиме "Запись" на управляющийвход 13 устройства поступает и 1", ана информационные входы 8-8 И устройства с входной магистрали данных од 2новременно поступают К -разрядныхсообщений (где К = п), каждое из 25которых при отсутствии ошибок должно содержать нечетное количествоединиц.На первом этапе цикла "Запись"каждая К -разрядная группа входов28 обрабатывается независимо от другик групп входов: 88 И ,1,8(+,),.. ,8 И соответствующим блоком 1 и индикатором неисправностей5 Р. При этом в каждом блоке 1(фиг,2и 4) в соответстппи с подматрйцейН двумерного кода, Формируютсяконтрольные разряды по...
Устройство для контроля блоков памяти

Номер патента: 526954
Опубликовано: 30.08.1976
Авторы: Дорохин, Каминский, Карлов, Плешев, Савелов, Толчинский
МПК: G11C 29/00
...состояние в котором (начальный адрес) установлено программным блоком, В зависимости от команды, выдаваемой счетчиком адресных операций, и в соответствии с состоянием дешифратора, г свою очередь зависящего от состояния счетчика циклов( от порядкового номера цикла), блок формирования адресов осуществляет преобразование кода счетчика адресоз, обеспечивая необходимый порядок перебора ячеек объекта проверки (естественный, много 526954кратный, чсредование выбора ячеек с прямым и инверсным соотношением адресов и разрядов адреса и т. д.).Обращение к той или иной ячейке памяти в необходимом режиме (записи, считывания, считывания без регенерации и т, д.) осуществляется посредством сигналов, выдаваемых блоком 15 формирования сигналов у,...
Устройство для автоматического контроля блоков памяти

Номер патента: 610180
Опубликовано: 05.06.1978
МПК: G11C 29/00
...элемента И 10 и через элемент задержки 11 к первому входу третьего элемента И 12. Выход регистра эталона 13 подключен к четвертЬму входу блока памяти 1 и к второму входу блока сравнения 4, вц-. ход которого подключен и первому входу элемента И 9. Входы регистров 8 и 13, триггера режима 14 и второй вход датчика 6 подключены к выходу блока ввода 5. Единичный выход триггера режима 14 подключен к первому входу элемента И 10, а нулевой - к третьему входу элемента И 9. Выход элемента И 10подключен к второму входу объекта контроля 1, а выход элемента И 9 - ко входу установки в О триггера неисправности 15. Вход установки в 1 триггера 15 и первый вход элемента ИЛИ 16подключены к цепи Пуск 1. Выход триг-Огера неисправности 15 подключен ко...
Устройство для контроля записи информации в блоках памяти

Номер патента: 949720
Опубликовано: 07.08.1982
Авторы: Губский, Дзагнидзе, Слесарь
МПК: G11C 29/00
Метки: блоках, записи, информации, памяти
...7, то по первому синхроимпульсу 17 записи в регистры 1 и 435В режиме считывания информационныевходы регистров 1 и 4 подключены к входу адреса устройства. Таким образом, по синхроимпульсам считывания на адресные входы блока 2 и накопителя 5 подаются оди 4 о наковые, а не смещенные, как в режимезаписи, адреса, по которым на информационном выходе устройства появляются записанные в блоке 2 коды, отмеченные в случае неверной записи логической 1 в контрольном разряде.Таким образом, при использовании коммутатора 3, регистра 4 и триггера 8 появляется возможность при записи сместить адреса накопителя 5 относительно адресов блока 2. Это дает возможность при применении контрольного считывания производить запись одного слова за время, равное времени...
Предыдущий патент: Устройство для определения координат центра изображения
Следующий патент: Устройство для распознавания аномальных областей в изображении
Случайный патент: Способ оценки взрывобезопасности нагретых проводников