Инерционный трансформатор вращающего момента
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1820105
Автор: Шашкин
Текст
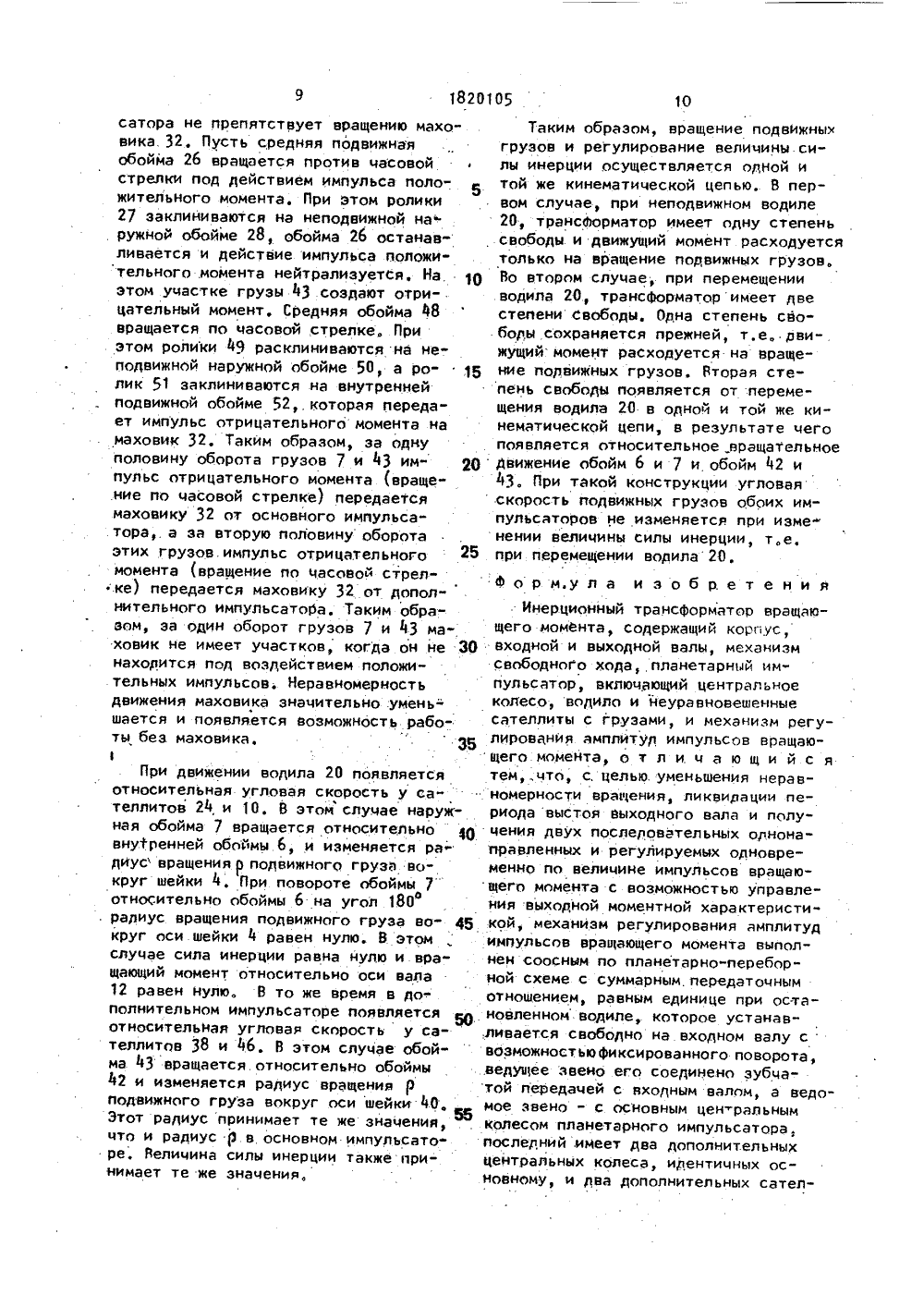
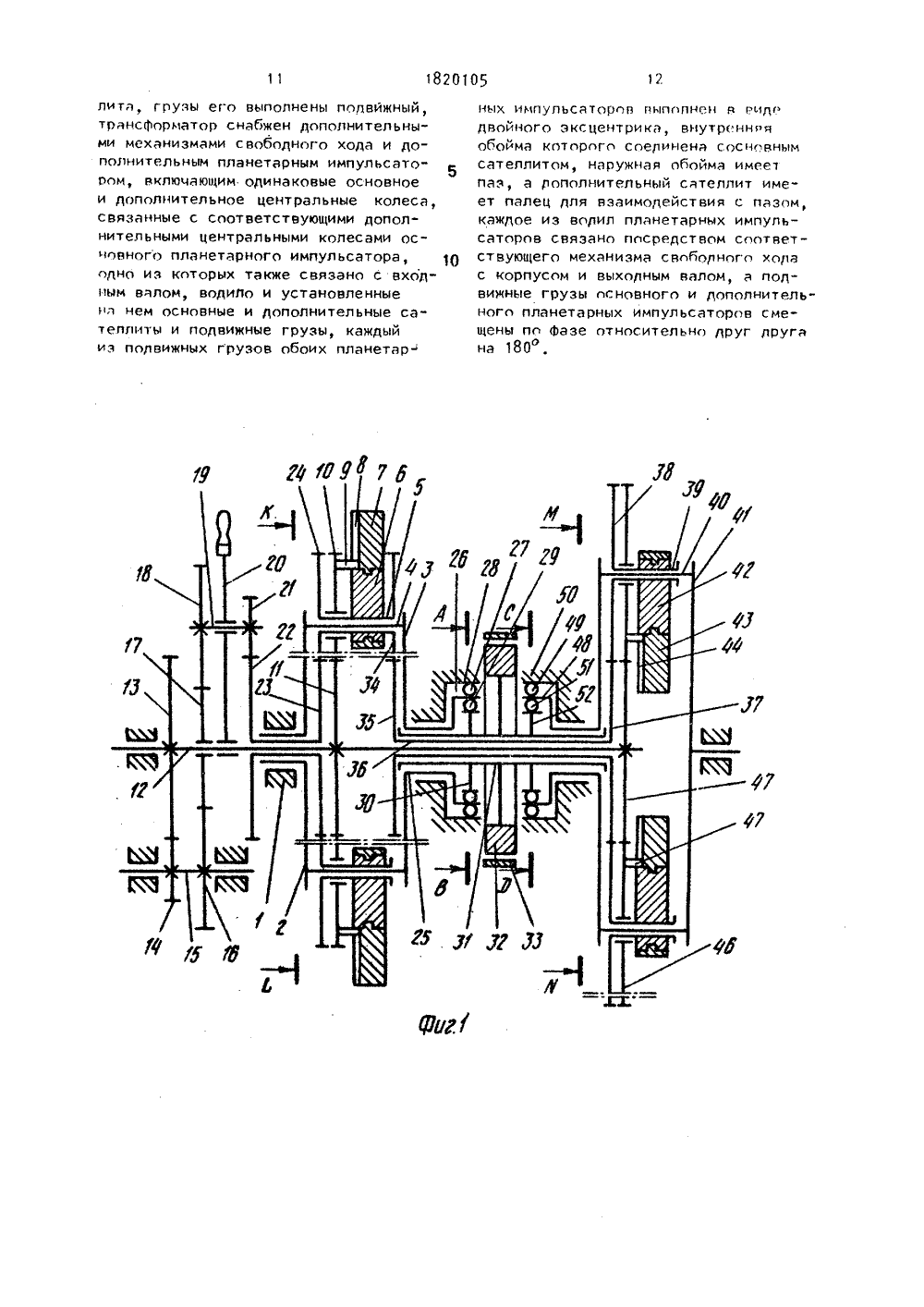
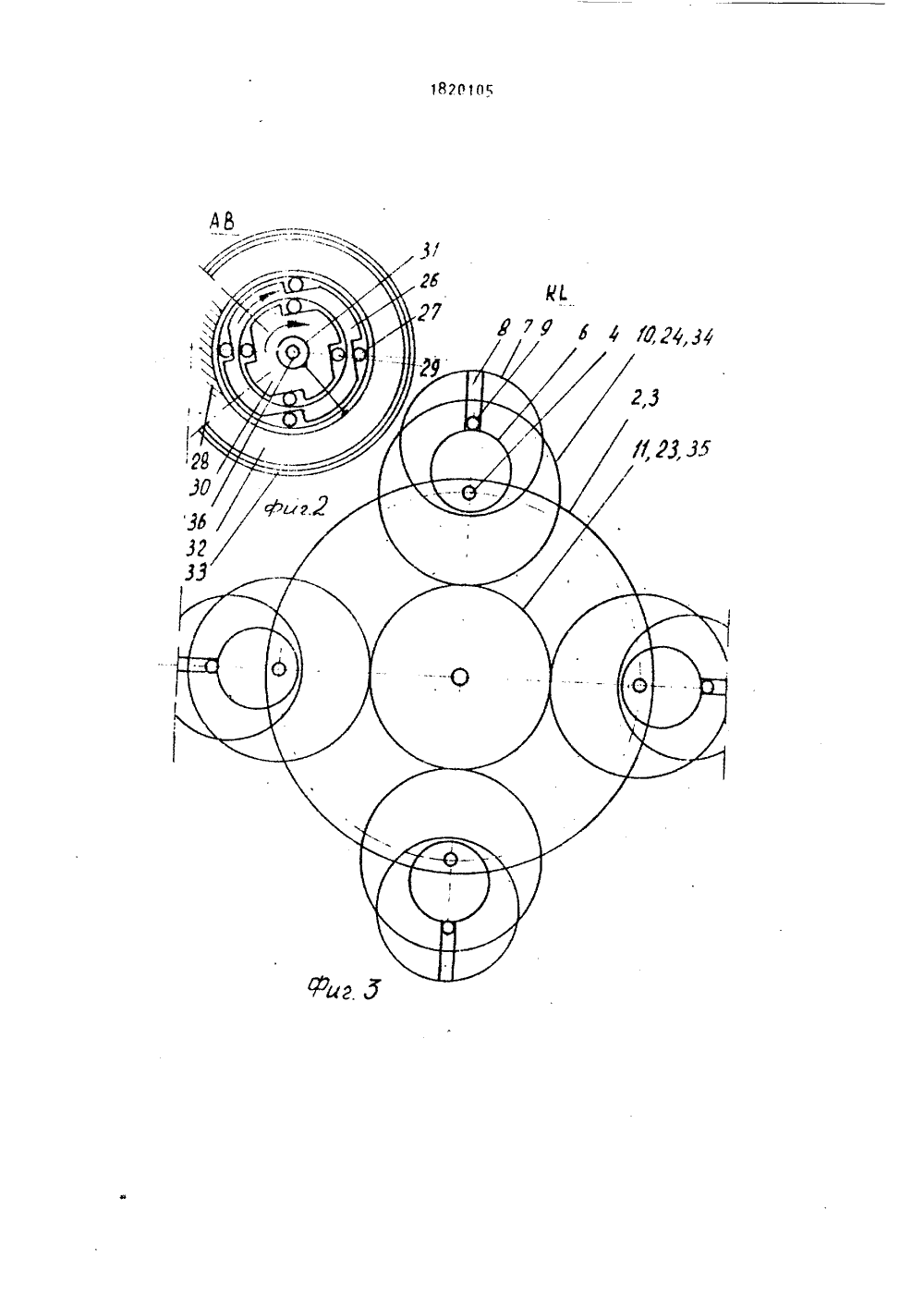
(ч 1 г 16 Н 33/14 НИЯ е ав- ащаюение,РРАбес ости ыход и эт есет второи3 ЮхоЪФ ие О О СОК):1 (.;3 ЯЕ 1(.;ИХГОЦИАЛИСТИЧЕСКИХРГГ 1 УЬЛИК ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕВЕДОМСТВО СССР(56) 1 Леонов А,И, Инерционнытоматические трансформаторы врщего момента. - М,: Машиностро1978, с, 11, Фиг, 22, Авторское свидетельствоР 643692, кл, 7 16 Н 33/14, 19(57) Использование: в передачахступенчатым регулированием сковращения и вращающего момента Изобретение относится к механизмам, .изменяющим плавно, бесступенчатО, величины момента и угловой скорости выхорного звена при неизменныхзначениях момента и угловой скоростивходного звена,Известен инерционный импульсныйавтоматический трансформатор вращающего момента грузовых автомобилей,в котором ведущий вал передачи изготовлен за одно целое с передней крышкой ведущего маховика, выполненногоразборным и несущего подшипники качения, в которых установлены оси сателлитов с закрепленными на них неуравновешенными грузами, причем сателлиты нахорятся в зацеплении с центральной шестерней, закрепленной наодном конце карданного вала автомобиля, жестко связанного с внутреннейобоймой механизма свободного хода,5 Ц 1820105 А 1 ного звена. Сущнлсгь изобретения; инерционный трансформатор содержиг механизмы свободного хода, основной и дополнительный оринаковьн-. планетарные импульсаторы с неуравновешенными сателлитами, на которых установлены подвижные грузы, связанные с механизмом регулирования С целью повышения равномерности вращения выходного звена неуравновешенные грузы сателлитов дополнительного планетарноо импульо сатора смещены по Фазе на 180 по отношению к неуравновешенным грузам сателлитов основного планетарноо импульсатора 5 ил. торого наружная обойма связана с корпусом передачи, пр оконец карданного вала нвик Я.Трансформатор имеет следу достатки,1, Передаточное отношение в немизменяется только при изменении момента сопротивления, его нельзя изменять чисто кинематически, те, приотсутствии момента сопротивления внем невозможно управление его выходной характеристикойвеличиной выходного момента и величиной угловойскорости выхорного вала,2, За орну половину периода одного колебания импульсатора положитель.ный импульс вращающего момента передается на выходной вал, изменяясьплавно от нуля ро максимума и опятьдо нуля, а на протяжении второй поло 1820105вины периода отрицательный импульсмомента не перерается нэ этот вал ивращательное движение на рабочую ма"шк,ну передается только с помощьюмаховика, что увеличивает неравномерность движения.Близким техническим решением кизобретению является инерционныйтрансформатор вращающего момента 2,1 Окоторый сорержит вхорной, промежуточный и выхорной валы, рва одинаковых планетарных ряра с четырьмя цент"ральными колесами и двумя сателлитами с неуравновешенными грузами, двв 15механизма сяоборного хора, регулирующее устройство, выполненное в виререверсивного гирромоторэ, статор иротор которого связаны с рвумя цент"рэльными колесами, и управляемую 20фрикционную муфту, фиксирующую статор и ротор регулирующего устройства,ТрансФорматор имеет следующие неростэтки.1, Его невозможно использовать в 25негидрофицировэнных машинах,2, В нем имеет место малая чув"ствительность и неточность регулировэния,3, Передаточное отношение в нем Оизменяется только при изменении момента сопротивления жа выходном ва"лу, его нельзя изменять чисто кинемэтически, т,е, при отсутствии момента сопротивления в нем невозможно 35управление его выхорной моментнойхарактеристикой.1. э одну поповину периода орного колебания импульсаторэ положительный импульс вращающего момента: 4 Оперерэется на выходной вал, плавноизменяясь от нуля ро максимума иопять ро нуля, а нэ протяжении второй половины периода отрицательныйимпупьс момента не передается на 45этот вэл, тэк кэк гасится неподвиж"ной наружной обоймой механизма свободного хора и вращательное движение нэ рабочую машину перераетсятолько с помощью маховика, что увегичивает неравномерность движения,Пелью настоящего изобретения является создание инерционного трансформатора вращающего момента, в когором уменьшена неравномерность враще 1 лия, пиквирировэн период выстоя выходного вала, получены рвэ последовагелных, однонаправленных и регулиру.мы- орновременнг по величине импульсов вращающего момента с возможностью управления выходной моментной характеристикой.Поставленная цель росгигается тем, что в инерционном трансформаторе вра" щэющего момента, сорержэщем корпус, входной и выхолной валы, механизмы своборного хора, планетарный импуль" сатор, включающий центральное колесо, водило и неурдвновешенные сателлиты с грузами, и механизм регулирования амплитуд импульсов вращающего момента, включающий ведущее и ведомые звенья, механизм регулирования амплитуд импульсов вращающего момента выполнен соосным по планетарно-переборной схеме с суммарным перераточным отношением, равным еринице при остановленном водиле, которое устанавливается свободно нэ входном валу с возможностью Фиксированного поворота, ведущее звено его соединено зубчатой передачей с вхорным валом, э ведомое звено - с основным центральным колесом планетарного импульсэтора, последний имеет два дополнительных центральных колеса, идентичных основному, и рва дополнительных сателлита, грузы его выполнены подвижными, трансформатор снабжен рополнительными механизмами свободного хора и дополнительным планетарным импульсатором, включающим одинаковые основное и дополнительное центральные колеса, связанные с соответствующими дополнительными центральными колесами основного планетарного импульсатора, одно из которых также связано с входным валом, водило и установленные на нем основные и дополнительные сателлиты и подвижные грузы, каждый из подвижных грузов обоих планетарных импульсаторов выполненв виде двойного эксцентрика, внутренняя обойма которого соеринена с основным сателлитом, наружная обойма имеет паз, а дополнительный сателлит имеет палец для взаимодействия с пазом, каждое из водил планетарных импульс.эторов связано посредством соответствующегоо механизма свободного хода с корпусом и выхорным валом, э под" вижные грузы основного и рополнительного планетарных импульсэторов смещены по фазе относительно друг друга нэ 180 градусов.18201а Фигприведена кинематическдя схемд преппдгдемого трансформдто- д, на фнг,2-5 - соответственно сечения Л, К 1 СО и %, обозначенные нд Фиг.1.Трдкфогмдтор содержит корпус 1, г которым шдрнирно связано водило, яыппленное в виде риска 2, соединс нноес таким же риском 3 четырьмя 10 шейками 4, г. которыми связаны шарнирн ступицы 5 четырех двойных эксцент-, риков нд внутренней обойме 6 которых сидят свбрно четыре наружных обоймы 7 с пазами 8, В эти пазы входят 15 пд.пьць 9 четырех дополнительных сателлитов 10, сидящих свободно на ступицахобойм 6 и входящих в зацепление с лополнительным центральным кпесом 11, жестко закрепленном на 20 центрдльнм валу 12. На другом конце этого вала закреплена шестерня 13, вхряря в зацепление с колесом 14, жестко здкрепленном нд промежуточном валу 15, несущем шестерню 16, 2 б входящую в зацепление с ведущим звеном 17, ндхорящимся в зацеплении с колесом 18, которое жестко закреплено нд валу 19, Этот вал образует шарнир с яодилом 20, сидящим свободно 30 нд центральном ндпу 12 и несет жестко нд нем закрепленную шестерню 21, входящую в зацепление с колесом 22 Звенья 17-22 образуют планетарный мехднизм, в котором звенья 17 и 2 являюгся центральными колесами, звенья 18, 19 и 2 - сдвоенным сателлитом, д эден .0 - врилом, Колесо 22 имеет жесткую связь с попым валом основного центрального колеса 23, 40 входящего в зацегление с четырьмя основными сателлитами 24, сидящими жестко нд ступицах 5 эксцентриков 6 Входной и выходной риски с четырьмя шейками 4 образуют ериный барабан, 4 нд ступице 25 которого жестко закреплена обойма 26 муфты свободного хора В гнездах наружной поверхности этой обоймы расположены ролики 27, взаимрействующие с неподвижной на ружной обоймой 28 Внутренняя поверхность обймы 26 взаимодействует с роликами 29 внутренней порвижной обоймы 30, жестко соериненной с выходным валом 31 несущим маховик 32, е;ф огибдемый тормозной лентой 33, На втором конце ступицы 5 закреплены четыре рополнительных сателлита 34, вхорящих в зацепление с дополнитель 05 6ным цент л 1 ым клес м 3 , кес тко сериненым г ступицей 6 нд втором конце торой закреплено сносное центральное коле 7 рплнитгльног импульсдгора, вхрящее в зацепление с четырьмя основными сателлитами 38, жестк закрепленными нд ступицах 39, шарнирно с ериненных с шейками 40 раух рискр 4 1, образующих водило репгнительног импульсатора, причем на ступицах 39 закреплены внутренние обЙ 42 четырех порвижных грузов, наружнье обоймы 43 которых имеют пазы 44, в которые входят пальцы 45 четыоех дополнительных сателлитов 46, шарнирно связанных со ступицами 39 и вхорящими в зацепление с дополнительным центральным колесом 47, жестко закрепленном на втором конце центрального вала 12, продолженного т основного импульсаторд к дополнительному, при этом диски 41 несут среднюю обойму 48 механизма свободного хода дополнительного импульсаторд, В гнезрах наружной поверхности этой обоймы расположены ролики 49, соприкасающиеся с непорвижной ндружнй.боймой 50 Внутренняя поверхнсть средней обоймь 48 соприкдсдется г рогикдми 5 внутренней порвиж й боймы 52, жестко соединенной г вьх лныч валом 31 маховика 32.нерционньй трднсфрмат . вращающего момента работает спер-",им образом.йт двигателя приводится во вращение центральный вдл 12, т которого приворится во вращение шестерни 11, 13 и 47. Шестерня 11 вращает дополнительный сателлит 1 О с пальцем, который с помощью паза 8 приводит во вращательное движение наружную обойму 7, которая имеет кольцевой выступ, входящий в кольцевой пдз внутренней обоймы 6, От дополнительного колеса 47 приводится во вращение сателлит 46 с пальцем 45, кото.- рый с помощью паза 44 приводит во вращательное рвижение обойму 43, которая имеет кольцевой выступ, входящий в кольцевой паз обоймы 42Из сечений К 1, и МЯ на фиг.3 и фиг,5 видно, что четыре обоймы 7 основного импульсатора направлены по радиусу от центра, а четыре обоймы 43 дополнительного импульсатора направлены по радиусу к центру устройст ва, 7 1820105 8Между направлениями обойм основногои дополнительного импульсатора образуются углы 180 , а направлениявращения обойм 7 и 43 одинаковы., Отшестерни 13 вала 12 приводится вдвижение ряд 14-24 зубчатых колес,причем сателлит 24, тесно связанныйсо ступицей 5 обоймы 6, вращает этуобойму. Передаточное отношение ряда 1 Околес 13-23 при неподвижном водиле20 должно быть равно Б з = 1. Наступице 5 сателлита 24 жестко сидитдополнительный сателлит 34, которыйвращает дополнительное колесо 35 пЬ слого вала 36, от которого вращаетсяосновное центральное колесо 37, азатем основной сателлит 38 ступицы39 внутренней обоймы.42, Передаточное отношение ряда колес 34-38 при дОнеподвижном водиле 20 должно бытьравно 11 . за= 1. Следовательно образует-,ся единая кинематическая цепь зубчатыхколес 13-33 с 13,з в = 1, для враще "ния одновременно внутренних обойм 256 и 42, В то же время пары колес11-10 и 47-46 вращают наружные обой"мы 7 и 43 от одного центрального вала 12,При неподвижном водиле 20 колеса ЭО11 и 23 имеют одну и ту же угловуюскорость и не имеют относительногодвижения. Тогда в основном импульсаторе сателлиты 24 и 10 не имеют относительного лвижения и обоймы 6 и 7вращаются как одно целое, Все сказанное относится и к работе звеньев37, 38, 47, 46, 42 и 43 дополнительного импульсатора, На Фиг,3 и фиг,5показано, что центры масс грузов 7 . 40и 43 распполагаются на наибольшем радиусе р от оси вращения 4 и 40 обойм6 и 42, и следовательно, при этом,развивается максимальная сила инерции подвижными грузами обоих импуль-.саторов, Эта сила создает момент нарадиусе, длина которого К равна рас"стоянию от оси вращения вала 12 дооси вращения 4 на,основном импульса"торе и до оси вращения 40 на дополнительном импульсаторе,. Эта длинаостается постоянной, Грузы 7 и 43располагаются попарно на вертикальной и горизонтальной осях устройства, Вращающий момент создается каждой парой грузов и изменяется по знаку, Если считать позицию грузов 7 и43 на Фиг 3 и фиг, 5 как начальную,то можно считать, что в этой пози,ции моменты, развиваемые грузами, равны нулю, При повороте грузов 7 на 90 ф вокруг оси шейки 4 (фиг,3, сечение К 1.) моменты двух грузов, расположенных на вертикальной оси, и моменты двух грузов, лежащих на горизонтальной оси, направлены оба против часовой стрелки и суммируются (положительный момент), При повороте грузов 43 на 90 вокруг оси шейки 40 (фиг. 5, сечение ММ) моменты двух грузов, расположенных на вертикаль ной оси, и моменты двух грузов, лежацих на горизонтально оси, направленыоба по часовой стрелке (отрицательный момент). При повороте грузов 7 и 43 на 180 от начального положения, они направлены по радиусам к центру вращения и моменты, развиваемые грузами, равны нулю. При повороте грузов 7 на 270 от начального положения моменты грузов, расположенных на вертикальной оси и моменты грузов, расположенных на горизонтальной оси, направлены оба по часовой стрелке, и суммируются (отрицательный момент). При повороте гру"озов 43 на 270 от начального положения моменты грузов, расположенныхна,вертикальной оси, и моменты грузов, расположенных на горизонтальной .оси, направлены оба против часо". вой стрелки и суммируются (положительный момент).Рассмотрим последовательность воздействия моментов на маховик черезмеханизмы свободного хода основногои дополнительного импульсаторов. Пусть средняя подвижная обойма 26 (фиг, 2) вращается по часовой стрелке под действием импульса отрицательного момента основного импульса- тора, При этом ролики 27 расклиниваются на неподвижной наружной обойме 28, а ролики 29 заклиниваются на внутренней подвижной обойме 30, которая приводит в движение маховик 32 по часовой стрелке, На рассматриваемом участке поворота грузы 43 создают положительный момент, Средняя обойма 48 вращается против часовой стрелки и ролики 49 заклиниваются на наружной неподвижной обойме 50, Положительный момент нейтрализуется. Маховик 32 при движении его по часовой стрелке расклинивает ролики 51 с помощью внутренней подвижной обоймы 52 и МСХ дополнительного импуль 1820105сатора не препятствует вращению маховика. 32, Пусть средняя подвижная обойма 26 вращается против часовой стрелки под действием импульса положительного момента. При этом ролики 27 заклиниваются на неподвижной на" ружной обойме 28, обойма 26 останавливается и действие импульса положительного .момента нейтрализуется, На, 10 этом участке грузы 43 создают отри-. цательный момент, Средняя обойма 48 вращается по часовой стрелке, При этом ролики 49 расклиниваются на не-.подвижной наружной обойме 50, а ролик 51 заклиниваются на внутренней подвижной обойме 52,. которая передает импульс отрицательного момента на маховик 32, Таким образом, за одну половину оборота грузов 7 и 43 им" р 0 пульс отрицательного момента (враще.ние по часовой стрелке) передается маховику 32 от основного импульса- тора,. а за вторую половину оборота этих грузов, импульс отрицательного момента (вращение по часовой стрелке) передается маховику 32 от дополнительного импульсатора, Таким образом, за один оборот грузов 7 и 43 маховик не имеет участков, когда.он не 30 находится под воздействием положительных импульсов. Неравномерность движения маховика значительно умень-" шается и появляется возможность работы без маховика. 35При движении водила 20 появляетсяотносительная угловая скорость у сателлитов 24 и 10, В этом случае наружная обойма 7 вращается относительновнутренней обоймы 6, и изменяется радиус вращения в подвижного груза вокруг шейки 4, При повороте обоймы 7относительно обоймы 6 на угол 180, радиус вращения подвижного груза вокруг оси шейки 4 равен нулю. В этомслучае сила инерции равна нулю и вращающий момент относительно оси вала12 равен нулю. В то же время в дополнительном импульсаторе появляетсяотносительная угловая скорость у сателлитов 38 и 46, В этом случае обойма 43 вращается. относительно обоймы42 и изменяется радиус вращения 2подвижного груза вокруг оси шейки 4 О,Этот радиус принимает те же значения,что и радиус Р в основном импульсаторе, Величина силы инерции также принимает те же значения,Таким образом, вращение подвижных грузов и регулирование величины силы инерции осуществляется одной итой же кинематической цепью. В первом случае, при неподвижном водиле 20, трансборматор имеет одну степеньсвободы и движущий момент расходуетсятолько на вращение порвижных грузов,Во втором случае, при перемещенииводила 20, трансформатор имеет двестепени свободы. Одна степень своборы сохраняется прежней, т,е, рвижущий момент расходуется на вращение подвижных грузов. Вторая степень свободы появляется от перемещения водила 20 в одной и той же кинематической цепи, в результате чего появляется относительное вращательное движение обойм 6 и 7 и обойм 42 и 43, При такой конструкции угловая скорость подвижных грузов обоих импульсаторов не изменяется при изме нении величины силы инерции, т,е, при перемещении водила 20.Ф о р м у л а изобретенияИнерционный трансформатор вращающего момента, содержащий корг ус, входной и выходной валы, механизм свободного хода,.планетарный импульсатор, включающий центральное колесо, водило и неуравновешенные сателлиты с грузами, и механизм регулирования амплитуд импульсов вращающего момента, о т л и ч а ю щ и й с я темчто, с целью. уменьшения неравномерности вращения, ликвирации периода выстоя выходного вала и получения двух послеровательных орнонаправленных и регулируемых одновременно по величине импульсов вращающего момента с возможностью управления выхорной моментной характеристикой, механизм регулирования амплитудимпульсов вращающего момента выполнен соосным по планетарно-переборной схеме с суммарным передаточнымотношением, равным единице при остановленном водиле, которое устанавливается свободно на.входном валу с возможностьюфиксированного поворота, ведущее звено его соединено зубчатой передачей с входным валом, а ведомое звено - с основным цен ральным колесом планетарного импульсатора, послерний имеет два дополнительных центральных колеса, идентичных основному, и два дополнительных сател 1820105 1лита, грузы его выполнены подвижный,трансформатор снабжен дополнительными механизмами свободного хода и дополнительным планетарным импульсатором, включающим одинаковые основноеи дополнительное центральные колеса,связанные с соответствующими дополнительными центральными колесами основного планетарного импульсатора, щодно из которых также связано с входным валом, водило и установленныена нем основные и дополнительные сатеплиты и подвижные грузы, каждыйиз полвижных грузов обоих планетар" ных импульсаторов выполнен я еидсдвойного эксцентрика, внутренн яобойма которого соединена соси внымсателлитом, наружная обойма имеетпаз, а дополнительный сателлит имеет палец для взаимодействия с пазом,каждое из водил планетарных импульсаторов связано посредством соответствующего механизма свободного ходас корпусом и выходным валом, а подвижные грузы основного и дополнительного планетарных импульсаторов смещены по фазе относительно друг лругэна 18 Оо1820105 Составитель А,Ваш Техред М.Моргента актор В.Трубче Кешеля орректо дственно-издательский комбинат "Патент", г. Ужгород арина, 101 П Заказ 2017 Тираж ВНИИПИ Государственного комитета 113035, Москва, Подписноеизобретениям и открытиям при ГКНТ ССС5, Раушская наб д, 4/5
СмотретьЗаявка
4827467, 21.05.1990
А„С. Шашкин и С„А. Шашкин 1, Леонов А. И, Инерционные автоматические трансформаторы вращающего момента. М.: Машиностроение, 1978, с, 11, Лиг. 2, 2. Авторское свидетельство СССР К 643692, кл. F 16 Н 3314, 1977
ШАШКИН АНАТОЛИЙ СТЕПАНОВИЧ, ШАШКИН СТЕПАН АНАТОЛЬЕВИЧ
МПК / Метки
МПК: F16H 33/14
Метки: вращающего, инерционный, момента, трансформатор
Опубликовано: 07.06.1993
Код ссылки
<a href="https://patents.su/8-1820105-inercionnyjj-transformator-vrashhayushhego-momenta.html" target="_blank" rel="follow" title="База патентов СССР">Инерционный трансформатор вращающего момента</a>
Учебный прибор для демонстрации закона охранения осевого кинетического момента вращающейся системы

Номер патента: 110857
Опубликовано: 01.01.1957
Автор: Мильковский
МПК: G09B 23/08
Метки: вращающейся, демонстрации, закона, кинетического, момента, осевого, охранения, прибор, системы, учебный
...меньше силы его тяжести. Шарнирньш стержень 13 средней частью своей свободно посажен на валу 2 так, что может качаться и нем, как ця оси.Грузы О ц 11 могут быть перемещены по направляющим спицам-хордам 9 одновременно ц равномерно в направлении от обод колеса к оси вала 2 посредством натякения гибкого стального троса 15, проходящего по кагалу 4 вла 2 ц огцояюцего цаправляоцшс блоки 5 ц 8.Трос 15 прикреплен к грузу 10 в точке 16 и к .рузу 11 концом своим в точке 17. 1( другому концу троса 15 жестко прикреплен цилиндрической формы пяточняя опора И, могущая врашяться на заплечцке-подпятникс 19 трубки 20, свободно насаженной ця вял 2. Трубка 20 имеет крышку 21 ц жестко связана с г- кой 22 ходового виггя 27, установленного и двугОдццпникя 24...
Устройство для передачи вращающегося момента привода регулирующего органа атомного реактора

Номер патента: 555739
Опубликовано: 15.11.1984
Авторы: Горюнов, Деревянкин, Жучков, Зайцев
МПК: G21C 7/14
Метки: атомного, вращающегося, момента, органа, передачи, привода, реактора, регулирующего
...перемещения ЗОштанги регулирующего органа и механизмом управления захватом, и управляемые дистанционно электромагнитные муфты, включающие в себя ведущие и ведомые элементы, катушки возбуждения, и кинематически связанныес ведущим и ведомыми валами 3 .Однако такое устройство имеетсложную конструкцию, обусловленнуюпараллельным вращением осей ведуще Ого и ведомых валов на расстоянии,определяемом размерами муфт и ихкорпусов,Цель изобретения - упростить конструкцию привода.Это достигается тем, что корпус выполнен герметичным, ведущий и ведомые валы установлены соосно, причем конец недущего вала ныполнен 5 О полым и в нем установлены ведущие элементы муйт, один ведомый вал с размещенным на нем,ведомым элементом муфты установлен внутри...
Устройство для возбуждения вращающего динамического момента

Номер патента: 1279679
Опубликовано: 30.12.1986
Автор: Шаволов
МПК: B06B 1/16
Метки: возбуждения, вращающего, динамического, момента
...неуравновешенные сателлиты 13 с противоположно ориентированными один относи тельно другого дебалансами 14. Дебалансы 14 в паре импульсных вибровозбудителейрасположены на наиболь.шем, а в паре импульсных вибровозбудителей 8 на наименьшем удалении от 40 оси центральных колес 12. Грузы 11 сориентированы в одинаковом тангенсальном направлении.Устройство для возбуждения вращающего динамического момента работает 45 следующим образом. Вращающий момент от приводного вала 2 через центральное колесо 4.и сателлиты 5, сблокированные с цент- у ральными колесами 12, передается на зубчатые планетарные механизмы импульсных вибровоэбудителей 7 и 8.Через колеса. 12 и диаметрально расположенные неуравновешенные сателлиты 13 с противоположно...
Способ измерения момента сопротивления на оси стабилизации гироскопического стабилизатора

Номер патента: 1840211
Опубликовано: 20.08.2006
Авторы: Крятов, Максимов, Мокеев, Ульяненков
МПК: G01C 17/38
Метки: гироскопического, момента, оси, сопротивления, стабилизатора, стабилизации
Способ измерения момента сопротивления на оси гиростабилизатора, содержащего датчик момента и привод разгрузки, основанный на измерении момента, компенсирующего момент сопротивления, отличающийся тем, что, с целью повышения точности измерения, разворачивают гироплатформу вокруг контролируемой оси с равномерной скоростью, например, с помощью датчика момента, измеряют управляющий сигнал в приводе разгрузки и по нагрузочной характеристике привода определяют момент, компенсирующий момент сопротивления.
Устройство для передачи крутящего момента от торца оси колесной пары к вагонному генератору

Номер патента: 463567
Опубликовано: 15.03.1975
МПК: B61D 43/00
Метки: вагонному, генератору, колесной, крутящего, момента, оси, пары, передачи, торца
...один из которых размещен в п оси между клиновыми планкам 5 ные элементы, отличающее с целью повышения его эксплуат дежности, зубчатый диск выпол частей в виде сегментов с накло кими гранями, между которым гой выступ крестовины, выпол етственно наклонными боковИзвестны устройства для передачи крутящего момента от торца оси колесной пары к вагонному генератору, содержащие осевую гайку с фланцем для крепления ведущего шкива привода генератора и шлицами на внутренней поверхности, взаимодействующими с зубьями диска, размещенного в полости гайки, крестовину с взаимно перпендикулярными выступами, один из которых размещен в пазу на торце оси между клиновыми планками. Однако эти устройства недостаточно надежны в эксплуатации, так как...
Предыдущий патент: Инерционный трансформатор вращающего момента
Следующий патент: Планетарная передача
Случайный патент: Магнитоэлектрический измерительный механизм