Система для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
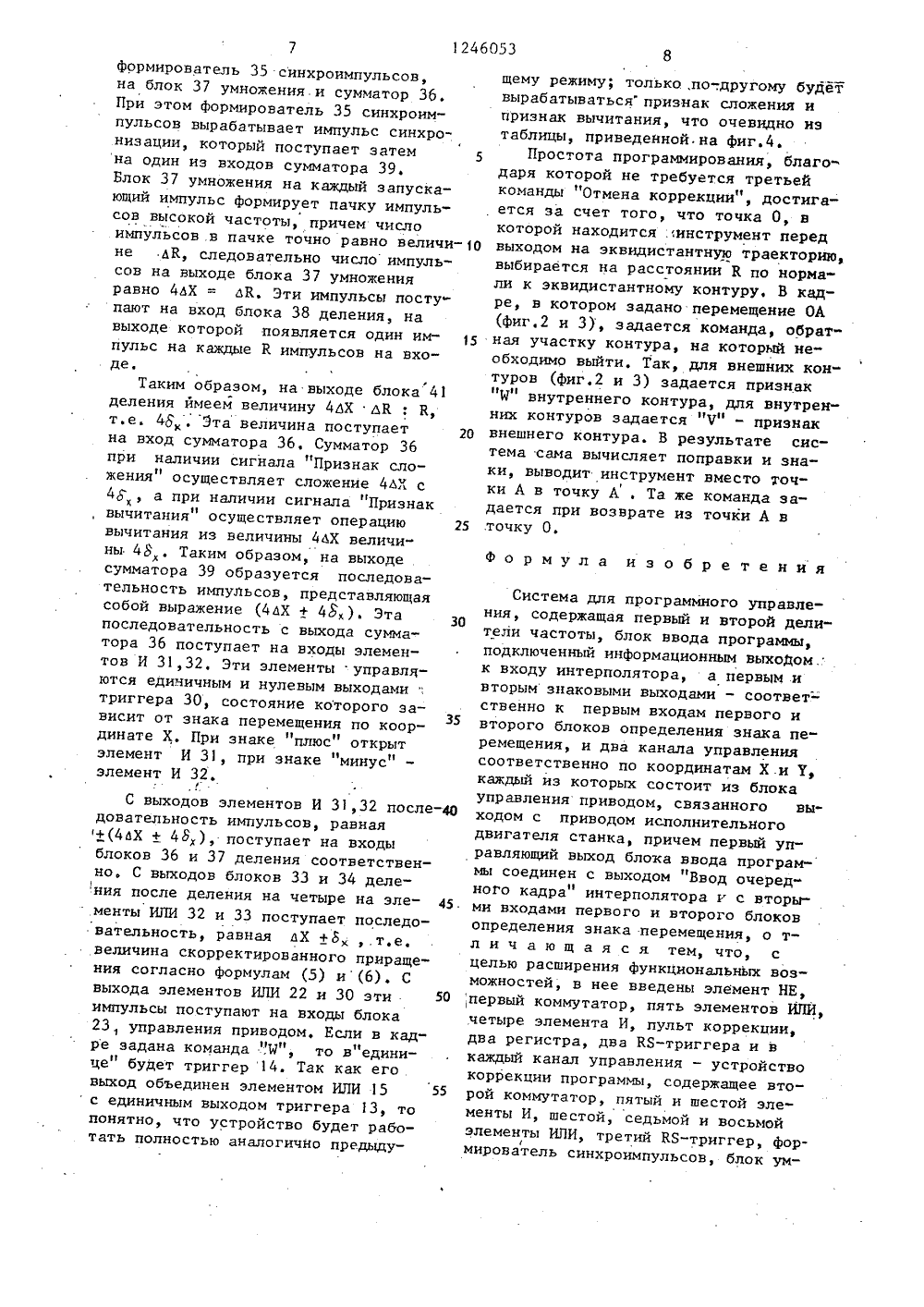
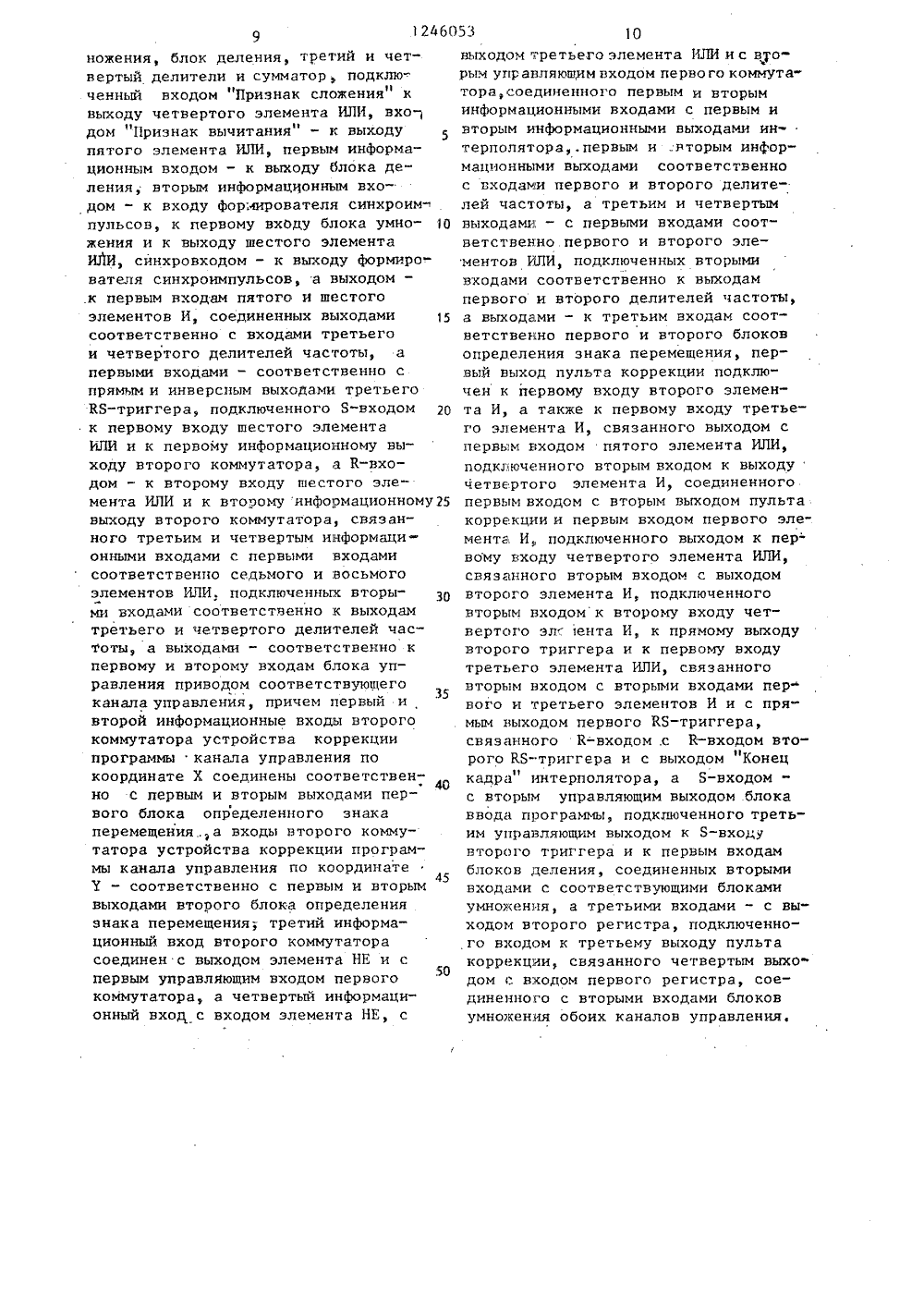
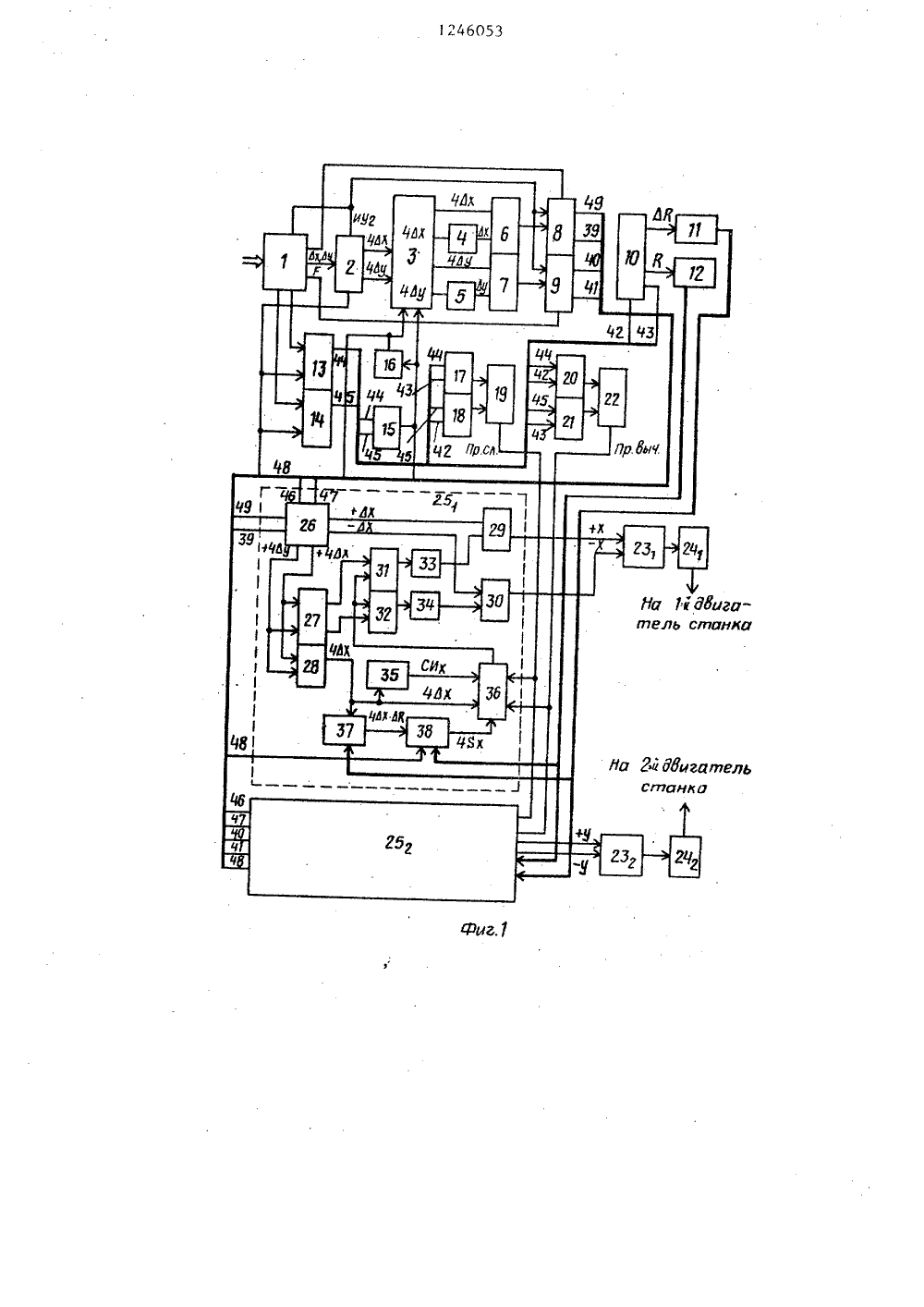
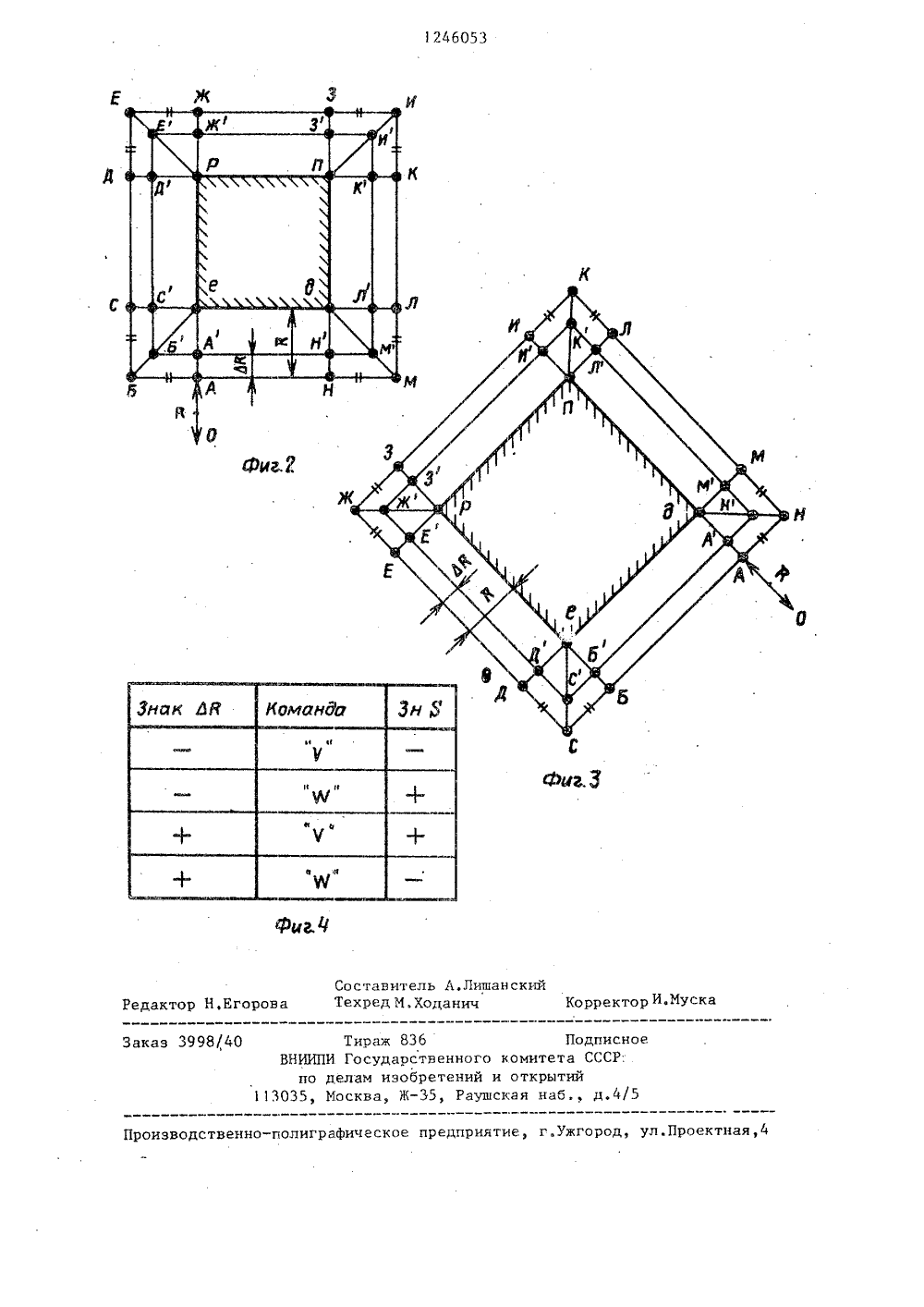
1246053 10 15 2 О 40 45 50 Изобретение относится к областиавтоматики и вычислительной техники и может быть использовано для управления фрезерными станками и другими видами технологического оборудования, где необходимо осуществлять коррекцию эквидистанты.Целью изобретения ;является расширение функциональных возможностей системы.На фиг, 1 представлена блок-схема системы для программного управления; на фиг. 2 - схема обработки детали прямоугольной формы и выхода инструмента.на траекторию; на фиг. 3 - схема обработки детали в форме квадрата (повернутого) и выхода инструмента на траекторию; на фиг. 4 - таблица определения знака, используемого при расчете величин корректировок,Система (фиг.1) .содержит блок 1 ввода программы, интерполятор 2, первый 3 коммутаторпервый 4 и второй 5 делители частоты, первый б и второй 7 элементы ИЛИ, первый 8 и второй 9 блоки определения знака перемещения, пульт 1 О коррекции, первый регистр 1 (регистр величины коррекции радиуса фрезы), второй регистр 12 (регистр величины радиуса фрезы), первый 13 и второй 14 К - Б-триггеры, третий элемент ИЛИ 15, элемент НЕ 16, первый 17 и второй 18 элементы И, четвертый элемент ИЛИ 19, третий 20 и четвертый 21 элементы И, пятый элемент ИЛИ 22, блоки 23 управления приводами (соответственно по каналам Х и Ч), приводы 24 исполнительного двигателя, устройства 25,коррекции программ. Каждое устройство коррекции программ (фиг.1) состоит иэ второго коммутатора 26, третьего К - Я-триггера 27, шестого 28, седьмого 29 и восьмого 30 элементов ИЛИ, пятого 3 и шестого 32 элементов И, третьего 33 и четвертого 34 делителя частоты, формирователя 35 синхроимпульсов, сумматора 36, блока 37 умножения, блока 38 деления. Линии 39 - 49 - межблочные связи системы. Система работает следующим образом, Программа обработки детали представляет собой траекторию движения центра фреэы (фиг.2) из нулевой точки О к первой точке А, лежащей на эквидистантном контуреудаленном от обрабатываемой поверхности детали на величину радиуса фрезы К,обхоц по этому контуру АБЕИМК в любом направлении с последующим возвращением в точку О. Для того, чтобыустройство могло работать и корректировать эквидистантный контур, необходимо траекторию разбить на кадры программы следующим образом: ОА, АБ, БС,СДю ДЕф ЕЖф ЖЗф ЗИ ИКф КЛ ЛМю МНфНА, АО. В кадре ОА программы, кромеосновной информации, задается команда"Признак внутреннего контура Ы", вкадре АБ, кроме основной информации,команда "Признак внешнего контура Ч,в кадре БС - команда "Ч", в кадре СДдополнительные команды отсутствуют,в кадре ДЕ - команда "Ч", в кадре ЕЖ команда Ъ, в кадре ЖЗ дополнитель-;ные команды отсутствуют, в кадре ЗИ и ИК задается команда "Ч", в кадре КЛ дополнительные команды отсутствуют, в кадрах ЛМ и МН - команда "Ч", в кадре НА дополнительные команды отсутствуют, в кадре АО задается команда. 11На фиг. 2 и 3 участки (кадры)траектории, где задана команда "У"обозначены однои черточкой, а участки (кадры) траектории, где задана ЗО команда "Ч" - двумя черточками. Притаком разбиении траектории движенияинструмента в случае, если используется фреза, не радиуса К, а радиусаК - лК, она двигается по траектории,обозначенной буквами со штрихами,т.е. для фиг,2 ОАБ С Д ЕЖ 3 И КЛМ Н А О. Эта траектория также является эквидистантной к контуру детали, но отстоящей от него на величину,К - лК. Следовательно, необходимо так скорректировать исходнуютраекторию, отстоящую от контурадетали на величину аК, чтобы онапревратилась в траекториюотстоящую ст контура детали на величинуК - лК, причем начальной и конечнойточкой скорректированной и не скорректированной траекторией должнабыть точка О. Из фиг. 2 и 3 видно, что для получения скорректированной траектории необходимо скорректировать только те кадры, которые отмечены одной или двумя черточками: при знаке лК - . минус и признаке внешнего контура модуль перемещения должен уменьшаться, при знаке лК -"минус и признаке внутреннего контура(4) 25. программы, является импульс ИУ 2, ко 30 увеличиваться, При положительном знаке 6 К ситуация меняется на обратную,Корректированные участки отличаются от некорректированных на величины 8 , 3 , Так, проекции отрезка Д С на координатные оси Х, У отличаются от проекций отрезка Д и С на величины 8 и 8 , т.е. Из подобия треугольников легко видеть, что величины о и б равны: хТогда для любого кадра программы, в котором присутствуют дополнительные команды: Признак внешнего кон, 11тура Ч" и "Признак внутреннего контура Я", скорректированные величины определяются по формулам дХ ьХ +ЬХ у (5)ьК 67 = )дУ+ьУ (б)дК причем знаки в формулах (5) и (б) определяются по описанному закону в зависимости от знака дК и наличия команд Ч и Ю, который можно представить в виде таблицы (фиг,4).Таким образом, предлагаемая система работает по следующему алгоритму: кадры программы, в которых нет команд признаков "Ч",. и "У", отрабатываются без коррекции, а кадры, в которых есть команда "Ч" или "Ф, отрабатываются с коррекцией в соответствии с формулами (5) и (6) со знаками поправок, соответствующими таблице (фиг.4).Рассмотрим, как происходит отработка кадров программы, в которых отсутствуют команды "Ч" или "М". Программа отработки вводится с некоторого источника информации, например, с перфоленты в блок 1 ввода программы, в котором происходит ее дешифрирование и запоминание в промежуточной памяти, из которой она 5 10 15 20 35 40 45 50 55 распределяется по блокам устройстваследующим образом. Информация о величине перемещения ЬХ, лУ и скоростиподачи Г заносится в блок 2 интерполятора, Команды "Признак внешнегоконтура Ч" и "Признак внутреннегоконтура И" записываются в К - Б-триггеры 13 и 14, Перед началом работыс помощью пульта 10 коррекции оператор набирает величину расчетного радиуса фрезы К, которая запоминаетсяв регистре 12, и величину дК отклонения радиуса реальной фрезы от расчетного радиуса К, которая запоминается в регистре 11. Кроме того,на пульте 10 устанавливается в определенное положение тумблер выборазнака коррекции: + ЛК или -ЬК. Программа, составленная описанным образом с использованием команд "Ч" и"У", с некоторого носителя, например,с перфоленты, поступает на вход блока 1 ввода программы. Сигналом, запускающим ввод определенного кадра торый вырабатывается интерполятором 2 после импульса управления ИУ 1, Импульсы ИУ и ИУ 2 вырабатываются интерполятором 2 по окончании отработки каждого кадра, а также ри нажа- тии кнопки "Пуск" на пульте интерполятора (не показана) .Блок 1 ввода программы дешифрирует вводимую информацию, запоминает ее в промежуточной памяти, и по окончании отработки интерполятором очередного кадра распределяет ее по блокам. следующим образом. Информация о величинах перемещений ЬХ, ЛУ и о величине подачи Р передается в интерполятор 2, информация о знаках координатных перемещений ЛХ, Я." передается в блоки 8 и 9 определения знака перемещения соответственно. Команды "Ч" и "Ю", если они имеются, устанавливают в единичное состояние К - Я-триггеры 13 и 14. Поскольку триггеры 13 и 14 сбрасываются импульсом ИУ 1, то команды "Ч" и "1" действуют только в течение одного кадра.Если в кадре программы отсутствуют команды "Ч" и "И", то кадр отрабатывается беэ коррекции, При этом система работает следующим образом. Интерполятор 2 отрабатывает введен- . ную инФормацию, и .учетверенные приращения .4 ЛХ и 4 И с е".о выходов поступают на входы коммутатора 3. Информация вырабатывается интерпо 126053лятором с учетверением, что при построении интерполяторов на умно- жителях необходимо для обеспечения равномерности следования выходных импульсов, т,е. точности интерполяции.Поскольку команды "И" и " сутствуют, К - Я-триггеры 13 и находятся в нулевом (К)состоянии, и на выходе элемента ИЛИ 15 также 10 нулевой сигнал, а на выходе элемента НЕ 16 имеется единичный сигнал. Этот сигнал; является признаком работы без коррекции и поступает на управляющий вход коммутатора 3 и15 управляющие входы коммутатора 26 устройств 25и 25 коррекции программы, Поскольку на коммутатор 3 воздействует сигнал .Работа без коррекции, то выходные сигналы интерполятора коммутируются на 1 эходы делителей 4 и 5 частоты, выполняющих роль сглаживающих делителей, и с их выходов импульсы приращений йХ, лУ поступают на входы элементов ИЛИ 25 6 и 7, с выходов которых подаются на входы блоков 8 и 9 определения знака. Последние коммутируют импульсы приращения аХ, бУ в каналы плюс или минус в соответствии с заданными знаками. Выходные сигналы схемы 8 выбора знака поступают на входы коммутатора 29 блока 27 коррекции программы по коорцинате Х, Выходные сигналы блока опрецеления35 знака перемещения поступают на входыаналогичного коммутатора блока 28 коррекции программы по координате .Рассмотрим работу устройства 25 коррекции программы, так как работа устройства 25 коррекции программы аналогична. Так как на управляющем ,входе коммутатора 26 имеется сигнал "Работа без коррекции", то инФормация + ЬХ коммутируется на входы эле ментов ИЛИ 29 и 30 соответственно, а с их выходов - на вхоцы блока 23 управления приводом. Выходной сигнал блока 23, управления приводом поступает на вход привода 24 испол- нительного двигателя станка, который управляет исполнительным двигателем координаты Х станка, Аналогично работает устройство по координате У. В случае, если в кадре задана ко манда "7" и "Ы", система работает следующим образом. Пусть для определенности в кадре создана команда, т,е, признак, внешнего контураЗаметим, что задавать одновременнокоманды Ч" и "11" нельзя так какконтур не может быть одновременнои внутренним и внешним. Б этом случае К - Б-триггер 13 устанавливается в положение единицы (Б) и его выходной сигнал, воздействуя на входэлемента ИЛИ 15, Формирует на еговыходе сигнал Работа с коррекциеикоторый поступает на входы коммутаторов 3 и 26 в устройствах 25, и 25Кроме того, единичный сигнал с выходатриггера 13 поступает на элементы И17, 20. Совокупность элементов И 17,1 8 и ИЛИ 9 реализует Функцию Формирования сигнала суммирования попра"вок - Признак сложения , а элементов И 20, 21 и элемента ИЛИ 22Функцию поправок вычитания - ПризнакычитанияПрн этом реализуется логика потаблице на фиг.4, для чего подаются.сигналы знака поправки плюс илиминус с пульта 1 О и команды Ч" и"Ь" с вьходов триггеров 13 и 14. Дпяслучаев, изображенных на Фиг. 2 и 3,Д имеет знак "минусследовательно два единичных потенциала присутствуют на входах элемента И 20, ина выходе элемента ИЛИ 22 будет сигнал Признак вычитания . Так как навходе коммутатора 3 присутствуетнсигнал Работа с коррекцией , то онкоммутирует выходные сигналы интерполятора 2 - А ЛХ и АлУ непосредственно на входы элементов ИЛИ 6,7, с выхода которых через блоки 8 и 9 определения знаков перемещений они поступают по каналам соответствующихзнаков на входы коммутаторов 26 устройств 25 и 25 , Так как на входы1коммутатора 26 теперь присутствуетсигнал "Работа с коррекцией", сигналы г.оявляются на выходах, подключенных ко входам триггера 27 и элемента ИЛИ 28,Если на входе коммутатора былаинФормация по каналу плюс , то она появится на выходе коь,мутатора 26, подключенного к Б-входу триггера 27; если по каналу "минус - то на входе 2, благодаря чему триггер 27 запоминает знак перемещения. Какой бы знак ни был у выходных импульсовони появляются н выходе элеменэ а ИЛИ 28 Каждый выходной импульс этого элемента поступает на(фиг.2 и 3), задается команда, обрат 15 ная участку контура, на который не 20 25 30 35 40 формирователь 35 синхроимпульсов, на блок 37 умножения.и сумматор Зб. При этом формирователь 35 синхроимпульсов вырабатывает импульс синхронизации, который поступает затем на один из входов сумматора 39. Блок 37 умножения на каждый запускающий импульс формирует пачку импульсов высокой частоты, причем число импульсов в пачке точно равно величине ЛК, следовательно число импульсов на выходе блока 37 умножения равно 4 ЬХ = ьК. Эти импульсы посту лают на вход блока 38 деления, на выходе которой появляется один импульс на каждые К импульсов на входе.РТаким образом, на выходе блока 41 деления ймеем величину 4 ЬХ дК : К, т.е. 4 Я. Эта величина поступает на вход сумматора 36, Сумматор 36 при наличии сигнала "Признак сложения" осуществляет сложение 4 ЬХ с 4 Г, а при наличии сигнала "Признак вычитания осуществляет операцию вычитания из величины 4 ЬХ величины 48 . Таким образом, на выходе сумматора 39 образуется последовательность импульсов, представляющая собой выражение (4 йХ + 48). Эта последовательность с выхода сумматора 36 поступает на входы элементов И 31,32. Эти элементы управляются едичичным и нулевым выходами триггера 30, состояние которого зависит от знака перемещения по координате Х, При знаке "плюс" открыт элемент И 31, при знаке "минус" - элемент И 32.(С выходов элементов И 31,32 последовательность импульсов, равная +(4 йХ + 48), поступает на входы блоков 36 и 37 деления соответственно. С выходов блоков ЗЗ и 34 деления после деления на четыре на элементы ИЛИ 32 и 33 поступает последовательность, равная дХ +Б,.т.е. величина скорректированного приращения согласно формулам (5) и (6). С выхода элементов ИЛИ 22 и 30 эти 50 импульсы поступают на входы блока 23 управления приводом. Если в кадре задана командаИ", то в"единице" будет триггер 14. Так как его выход объединен элементом ИЛИ 15 55с единичным выходом триггера 13, то понятно, что устройство будет работать полностью аналогично предыдущему режиму; только,по-,другому будет вырабатыватьсяпризнак сложения и признак вычитания, что очевидно из таблицы, приведенной на фиг.4.Простота программирования, благодаря которой не требуется третьей команды "Отмена коррекции", достигается за счет того, что точка О, в которой находится .;инструмент перед выходом на эквидистантную траекторию, выбирается на расстоянии К по нормали к эквидистантному контуру, В кадре, в котором задано перемещение ОА обходимо выйти, Так, для внешних контуров (фиг.2 и 3) задается признак"у" внутреннего контура, для внутренних контуров задается "Ч" - признак внешнего контура. В результате система сама вычисляет поправки и знаки, выводит инструмент вместо точки А в точку А . Та же команда задается при возврате из точки А в.точку О. формула изобретения Система для программного управления, содержащая первый и второй делители частоты, блок ввода программы, подключенный информационным выхоЯом. к входу интерполятора, а первым и вторым знаковыми выходами - соответ- ственно к первым входам первого и второго блоков определения знака перемещения, и два канала управления соответственно по координатам Х и 7, каждый из которых состоит из блока управления приводом, связанного выходом с приводом исполнительного двигателя станка, причем первый управляющий выход блока ввода программы соединен с выходом "Ввод очередного кадра" интерполятора г с вторыми входами первого и второго блоков определения знака перемещения, о тл и ч а ю щ а я с я тем, что, с целью расширения функциональных возможностей, в нее введены элемент НЕ,первый коммутатор, пять элементов ИЛИ, четыре элемента И, пульт коррекпии, два регистра, два КЯ-триггера и в каждый канал управления - устройство коррекции программы, содержащее второй коммутатор, пятый и шестой элементы И, шестой, седьмой и восьмой элементы ИЛИ, третий КЯ-триггер, фор/мирователь синхроимпульсов, блок ум 124 бО9ножения, блок деления, третий и четвертый делители и сумматор подключенный входом "Признак сложения" к выходу четвертого элемента ИЛИ, входом Признак вычитания" - к выходу пятого элемента ИЛИ, первым информационным входом - к выходу блока деления, вторым информационным вхо" дом - к входу формирователя синхроимпульсов, к первому входу блока умно жения и к выходу шестого элемента ИЙИ, синхровходом - к выходу формирователя синхроимпульсов, а выходом - .к первым входам пятого и шестого элементов И, соединенных выходами 15 соответственно с входами третьего и четвертого делителей частоты, а первыми входами - соответственно с прямым и инверсным выходами третьего КБ-триггера, подключенного Б-входом 20 к первому входу шестого элемента ИЛИ и к первому информационному выходу второго коммутатора, а К-входом - к второму входу шестого элемента ИЛИ и к второму ннформационному 25 выходу второго коммутатора, связанного третьим и четвертым информационными входами с первыми :входами соответственно седьмого и восьмого элементов ИЛИ. подключенных вторыми входами соответственно к выходам третьего и четвертого делителей частоты, а выходами - соответственно к первому и второму входам блока управления приводом соответствующего35 канала управления, причем первый и второй информационные входы второго коммутатора устройства коррекции программы канала управления по координате Х соединены соответственно с первым и вторым выходами первого блока определенного знака перемещенияа входы второго коммутатора устройства коррекции программы канала управления по координате45 У - соответственно с первым и вторым выходами второго блока определения знака перемещения; третий информационный вход второго коммутатора соединен с выходом элемента НЕ и с первым управляющим входом первого коммутатора, а четвертый информационный вхоц с входом элемента НЕ, с выходом третьего элемента ИЛИ и с вторым управляющим входом первого коммутатора, соединенного первым и вторыминформационными входами с первым ивторым информационными выходами интерполятора.первым н .вторым информационными выходами соответственнос входами первого и второго делителей частоты, а третьим и четвертымвыходами - с первыми входами соответственно.первого и второго элементов ИЛИ, подключенных вторымивходами соответственно к выходампервого и второго делителей частоты,а выходами - к третьим входам соответственно первого и второго блоковопределения знака перемещения, первый выход пульта коррекции подключен к первому входу второго элемента И, а также к первому входу третьего элемента И, связанного выходом спервым входом пятого элемента ИЛИ,подкг.:юченного вторым входом к выходучетвертого элемента И, соединенногопервым входом с вторым выходом пультакоррекции и первым входом первого элемента И подключенного выходом к пер-вому входу четвертого элемента ИЛИ,связанного вторым входом с выходомвторого элемента И, подключенноговторым входомк второму входу четвертого эл. ента И, к прямому выходувторого триггера и к первому входутретьего элемента ИЛИ, связанноговторым входом с вторыми входами перного и третьего элементов И и с прямым выходом первого КБ-триггера,связанного К-входом .с К-входом второго КБ-триггера и с выходом Конецкадра" интернолятора, а Б-входом "с вторым управляющим выходом блокаввода программы, подключенного третьим управляющим выходом к Б-входувторого триггера и к первым входамблоков деления, соединенных вторымивходами с соответствующими блокамиумножения, а третьими входами - с выходом второго регистра, подключенного входом к третьему выходу пультакоррекции, связанного четвертым выходом с входом первого регистра, соединенного с вторыми входами блоковумножения обоих каналов управления.Составитель Л,Лишанскииедактор И.Егорова Техред М.Ходанич Корректор И Муска Заказ 3998 оизводственно-полиграфическое предприятие, г.ужгород, ул.Проектная Тираж 83 б ВНИИПИ Государственного ко по делам изобретений и о 113035, Москва, Ж, Раушска
СмотретьЗаявка
3809999, 10.11.1984
ПРЕДПРИЯТИЕ ПЯ В-2190
КОШКИН ВЛАДИМИР ЛЬВОВИЧ, ГОРБЕНКО ЭДУАРД ТИХОНОВИЧ, СЕМЕНОВ ВИКТОР АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного
Опубликовано: 23.07.1986
Код ссылки
<a href="https://patents.su/8-1246053-sistema-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система для программного управления</a>
Устройство для коррекции программ
Номер патента: 1647574
Опубликовано: 07.05.1991
Автор: Улыбин
МПК: G06F 11/28
...доступак памяти рабочей ЦВМ. Из рабочейЦВМ на вход 21 устройства приходитсигнал разрешения доступа к памяти.Этот сигнал поступает на вход сбросатриггера 4 и установочный входтриггера 5. Триггер 4 сбрасываетсяв ноль, а триггер 5 устанавливаетсяв единичное состояние. При этом сигнал с выхода 20 устройства снимается, а единичный сигнал .с выхода триггера 5 поступает на выход 22 устройства и, далее, на вход подтверждения запроса рабочей ЦВМ, Кроме того,сигнал с выхода триггера 5 поступаетна первый вход элемента И 9, вход формирователя 15 и на управляющие входысчетчика 3 и регистра 14. При этомадрес А 1 с выхода счетчика 3 поступает на выход 23 устройства, а данныеД 1 с выхода регистра 14 поступаютна выход 24 устройства. Далее адреси...
Устройство для автоматического оп-ределения допусков параметровэлементов радиоэлектронных cxem

Номер патента: 815684
Опубликовано: 23.03.1981
Авторы: Базов, Киличенков, Шульгин
МПК: G01R 31/28
Метки: допусков, оп-ределения, параметровэлементов, радиоэлектронных
...начинаетсяследующий цикл опроса крайних точек,При этом величина характеристи)и остается той же, что и до коррекции.Если в этом цикле не оказалось ни одной неработоспособной крайней точки,то происходит увеличение характерис -тики на единицу, и вновь организуетсяцикл опроса крайних точек, Так продол жается до т ех пор, пок а опять где- нибудь не произойдет отказа, тогда 5вновь осуществляется коррекция и организация нового цикла. Работа устройства кончается при условии, что центрдопусковой области попадает в точку,в которой он уже один раз находился 20при том же значении характеристики допусковой области. Это положение Фиксирует блок 18 сравнения, на первый входкоторого поступает информация о пос-.леднем положении центра...
Устройство для обмена

Номер патента: 636603
Опубликовано: 05.12.1978
Авторы: Диденко, Конарев, Розен, Чернец, Шандрин
МПК: G06F 3/04
Метки: обмена
...соответствующих цепей, блок 5 ус"танавливает сигнал вызов 1 навыходе. Операционные блоки 7 принимают синал вызов 1 через коммутаторы и, в зависимости от кода врегистре 3, выполняют операции занесения информации с шин 11 или выдачиинформации на шины 11, либо другиепредусмотренные кодом операции, атакже посылают соответствующие сигналы на входы 28, 30 блока 4Занесение информации в операционные блоки 7, выдача информации иэ нихи другие действия, предусмотренныесигналами на выходе 24 регистра 3,должны осуществляться в течение времени, не превышающего величину Тб(Фиг2) . Величину Тб определяют длякаждого конкретного блока 7 как суммарное время, достаточное для опознавания блоком 7 сигнала вызов 1,занесения информации в операционныйблок...
Устройство для коррекции программ

Номер патента: 1092514
Опубликовано: 15.05.1984
Автор: Малышев
МПК: G06F 11/28
...столбцов (фиг,),причем каждый ее элемент23 содержит (фиг, 3) третий элемент(Фиг. 4),п групп, каждая из которых 5включает второй триггер 30 и шестойэлемент И 31, седьмой элемент И 32,третий триггер 33, светодиод 34,Предлагаемое устройство работаетв режимах записи и корректировки.Режим записи устанавливается замыканием переключателя 9. В этом случае устройство работает автономно ине оказывает влияния на работу ЦВМ.По текущему адресу на регистр 1 из 5устройства 2 считывается очереднаякоманда, которая через элемент 2 И-ИЛИ7 параллельным кодом поступает нарегистр 3, так как на вхоДе, а соответственно и на выходе, элемента 20ИЛИ б при замкнутом переключателе 9всегда находится сигнал1 , ана выходе элемента И 8 - сигнал0 ,Переключатель 9...
Устройство для коррекции программ

Номер патента: 1751768
Опубликовано: 30.07.1992
Авторы: Бек, Седых, Тимонькин, Ткаченко, Харченко, Чернышов
МПК: G06F 11/28
...канала (см. фиг.7).По следующему тактовому импульсу т 1, поступающему с первбго синхровхода 32 устройства на синхровход счетчика 10 длины подпрограмм, записывается через коммутатор 5 длины код длины подп рогр. мм с выхода 2,2 блока 2 или с выхода 3,2 блока 3 в зависимости от управляющего сигнала, поступающего на вход коммутатора 5 длины с выхода 3.4 блока 3 в зависимости от метки +1 (см, фиг,5), Поступивший код в счетчике 10 длины подпрограмм сравнивается с кодом эталона (см. фиг.3). После того как счет- чик 1 О длины подпрограмм сформировалимпульс г 12 (рассмотрено выше), данный сигнал поступает на схему задержки 42 и затем на й-вход счетчика 45, обнуляя его. По следующему тактовому импульсу т 1, поступающему с выхода 32...
Предыдущий патент: Следящая система поворота проектора кинотренажера
Следующий патент: Устройство для управления положением объекта
Случайный патент: Способ получения