Устройство для контроля параметров зубчатых колес
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки








Текст
РЕТЕНИ ЮМР(П ветствующим позиционным датчиком, электронный блок управления и обработки данных, входы которого электрически соединены с выходами позиционных датчиков, регулирующих конту ров и датчика линейных перемещений, о т л и ч а ю щ е е с я тем, что, с целью повы 1 ения точности контроля, каждый регулирующий контур снабжен регулятором хода, подключенным к его выходу регулятором скорости, в серводвигателя соединен с выходом регулятора скорости, выход одного из позиционных датчиков соединен с одним из входов регулятора хода, а выход тахогенератора подключен к второму входу регулятора скорости2. Устройство по п, 1, о т лич а ю щ е е с я тем, что оно снаб= жено управляющим тактовым генератором, выход которого соединен с вторым входом регулятора хода регулирующего контура привода вращения, преобразователем углового перемещения в линейное, соединенным с выходом поворотного позиционного датчика, вычислителем положения тангенциального ползуна, вход котоуого соединен с выходом преобразователя углового перемещения в линейное, переключателем, связанным выходом с одним иэ входов вычислителя положения тангенциального ползуна, а выходом - с вторым входом регулятора хода регулирующего контура тангенциального привода.3. Устройство по пп. 1 и 2, о л и ч а ю щ е е с я тем, что оно снабжено вычислителем положения осевого ползуна, вход которого связан с выходом поворотного позиционного датчика и переключателем, связанным входом с одним из выходов вычислителя положения осевого ползу на, а выходом - с вторым входом регулятора хода регулирующего конура осевого привода. 1) 2) 1) АГ ход 8) 9,(5 кл Т фирмырапу" т Вермонт РОЛЯодержа- е)99994 тт ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ОПИСАНИЕ ИК ПАТЕНТУ(72) Армии Штерки (Швейцарии Герд Роберт Зоммер (ФРГ )(54)(57) УСТРОЙСТВО ДЛЯ КОНТ ПАРАМЕТРОВ ЗУБЧАТЫХ КОЛЕС., с щее станину, установленные на н .й радиальный полэун с кинематически связанным с ним радиальным позиционным датчиком, установленным на радиальном полэуне, радиальный привод, кинематически связанный с радиальным олзуном, тангенциальный ползун с кинематически связанным с ним тангенциальннм позиционным датчиком, установленный на .тангенциальном ползуне осевой полэун с кинематически связанным с ним осевым позиционным датчиком и с датчиком линейных перемещений, расположенный на радиальном ползуне поворотный стол для установки зубчатых колес с кинематически связанным с ним поворотным позиционным датчиком, привод вращения, кинематически связанный с поворотным столом, тангенциальннй привод, кинематически связанный с тангенциальннм ползуном, осевой привод, кинематически связанный с осевым полэуном, три регулирующих контура, каждый из которых состоит иэ тахогенератора, кинематически связанного с ним серводвигателя, кинематически связанного с соот 061707 А1061707 4. Устройство по п. 1, о т л ич а ю щ е е с я тем, что оно снабжено управляющим тактовым генерато .ром, выход которого соединен с вторым входом регулятора хода регулирующего контура осевого привода, преобразователем углового перемещения .в линейное, соединенным с выходом осевого позиционного датчика, вычислиИзобретение относится к машиностроению, а именно к средствамконтроля зубчатых колес,Известно устройство для контроляпараметров зубчатых колес, содержащее станину, установленные на нейрадиальный и осевой ползуны, каждыйиз которых снабжен приводом и позиционным датчиком, поворотный стол,датчик линейных перемещений, блок 10управления.и обработки данных. Приконтроле, например, профиля зуба движение. обкатки осуществляется посредством двух перемещений: вращательного - стола и поступательного -тангенциальното ползуна. Электронный,блок управления и обработки данныхнепрерывно сравнивает данные, послан-ные позиционными датчиками, с "теоретическим угловым положением поворотного стола или тангенциального ползуна и вызывает коррекцию сигнала,посланного датчиком линейных перемещений 1 Д.Недостатком данного устройстваявляется сложность электронного блока управления и обработки данных,что снижает точность и стабильностьконтроля.Наиболее близким.к изобретениюпо технической сущности являетсяустройство для контроля параметровзубчатых колес, содержащее станину,установленные на ней радиальныйползун с кинематически связанным сним радиальным позиционным датчиком,35установленным на радиальном ползуне,радиальный привод, кинематическисвязанный с радиальным ползуном,тангенциальный.ползун с кинематически связанным с ним тангенциальным 40позиционным датчиком, установленныйна тангенциальном ползуне осевойползун с кинематически связанным сним осевйм позиционным датчикоми с датчиком линейных перемещений, 45расположенный на радиальном ползунеповоротный стол для установки зубчатых колес с кинематически связанным с ним поворотным позиционным теем положения поворотного стола,соединенным с выходом осевого позиционного датчика, переключателем,связанным входом с одним из выходоввычислителя положения поворотногостола, а выходом - с вторымвходом регулятора хода регу.лирующего контура привода вращения. датчиком, привод вращения, кинематически связанный с поворотным столом, тангенциальный привод, кинематичесхи связанный с тангенциальным ползуном, осевОй привод, кинематически связанный с осевым полэуном, три регулирующих контура, каждый иэ которых состоит из тахогенератора, кинематически связанного с ним серводви" гателя, кинематически связанного с соответствующим поэиционньм датчиком, электронный блок управленйя и обработки данных, входы которого электрически соединены а выходами позиционных датчиков, регулирующих контуров и датчика линейных.перемещений. Для измерения, например, профиля зуба в память электронного блока управления и обработки. данных вводится желаемый профиль эвольвентно контролируемого зубчатого. колеса, где он переводится в теоретический:путь, вдоль которого должен перемещаться датчик линейных перемещений, чтобы соблюдать заданное расстояние между собой и измеряемой в данный момент боковой поверхностью зуба при работающих приводе вращения и тангенциальном приводе. Электронный блок управления и обработки данных генерирует сигналы, необходимые для осуществления соответствующим образом скоординированного Вращательного движения зубчатого колеса вокруг своей оси и тангеициального перемещения датчика линейных перемещений с ощупывающим наконечником, Одновременно электронный блок управления и обработки данных использует электрические сигналы, поступающие от датчика линейных йеремещений и задающие положение его ощупывающего наконечника относительно кбнтролируемой боковой поверхности зуба в виде отклонения от заданного профиля. При этом посЛанные позиционным датчикомпривода вращения и тангеициальиого при вода сигналы непрерывно сравниваются электронным блоком управленияа выход тахогенератора подключенк второму входу регулятора скорости.При этом устройство снабжено5 управляющим тактовым генератором,выход которого соединен с вторымвходом регулятора хода регулирующегоконтура привода вращения, преобразо.вателем углового перемещения в ли 10 нейное, соединенным с выходом поворотного позиционного датчика, вычислителем положения тангенциальногоползуна,вход которого соединен свыходом преобразователя углового5 перемещения в линейное, переключателем, связанным выходом с одним извходов вычислителя положения тангенциального ползуна, а выходом - с вторим входом регулятора хода регулирующего контура тангенциальногоприводаКроме того устройство снабженовычислителем положения осевого ползуна, вход которого связан с выходом поворотного позиционного датчика и переключателем, связанным вхо.дом с одним из выходов вычислителяположения осевого ползуна, а выходом - с вторым входом регуляторахода регулирующего контура осевогоЭО привода,Устройство снабжено также управляющим тактовым генератором, выходкоторого соединен с вторым входомрегулятора хода регулирующегокон 35 тура осевого привода, преобразователем углового перемещения в линейное, соединенным с выходом осевогопозиционного датчика, вычислителемположения поворотного стола, соединенным с выходомосевого позиционного датчика, переключателем, связанным входом с одним из выходов вычислителя положения поворотногостола, а выходом - с вторым входом .45 Регултора хода Регулирующего контурапривода вращения.На Фиг. 1 показано устройстводля контроля параметров зубчатыхколес, общий вид; на .Фиг. 2 в блоксхема устройства для контроля профиля зуба на Фиг. 3.- блок-схема устройства для контроля профиля зубашага зубчатых шнеков на фиг. 4блок-схема устройства для контроляузлов, наклона зубьев ф на фиг. 5 -Эблок схема регулирующего контураустройство содержит старину 1, установленные на ней Миг, 1) радиаль.фный.полэун 2 с кинематически связанным с ним радиальным позиционным 60 65 и обработки данных с теоретическимугловым положением контролируемого,эубчатого колеса или с теоретическимположением несущего датчик линейныхперемещений тангенциального полэуна.Каждое отклонение фактического по,. ложения от теоретического вызываеткоррекцию посланных датчиком линей.ного перемещения сигналов. В результате фиксируются сигналы, которыев некоторой степени свободин отпогрешностей перемещения ползуновустройства 2 1,Недостатком этого техничесхогорешения является наличие сложногозапоминающего и вычислительногоустройства для накапливания данныхи приведения их во взаимное соответствие, Особенно снижается точностьконтроля, если вместо обработкиданных после завершения операцииконтроля необходимо осуществить ис-пользование их во.время самого процесса контроля.Цель изобретения - повышениеточности контроля.Поставленная цель достигаетсятем, что в устройстве для контроляпараметров зубчатых колес, содержащем станину, установленные наней радиальный полэун с кинематичес ки связанным с ним радиальным позиционным датчиком, установленнымна радиальном ползуне, радиальныйпривод, кинематически связанный срадиальным пблзуном, тангенциальныйползун с кинематически связаннымс ним тангенциальным позиционнымдатчиком, установленный на тангенциальном ползуне осевой ползун скинематически связанйнм с ним осевым позиционным датчиком и с датчиком линейных перемещений, расположенный на радиальном ползуне пово 1. Ротный, стол для.установки зубчатыхколес с кинематически связанным сним поворотным позиционным датчиком,привод вращения, кинематически свя"эанный с поворотным столом, тангенциальннй привод, кинематически свя-занный с тангенциальным ползуном,: .осевой привод, кинематически связан. ный с осевым ползуном, три регули:,рующих контура, каждый из которыхсостоит из тахогенератора, кинематически связанного с ним серводвигателя, кинематически связанного,ссоответствующим позиционным датчикомэлектронный блок управления и обработки данных, входы которого элек-.трически соединены с выходами позициониых датчиков, регулирующих контуров и датчика линейных перемещений,каждый регулирующий контур снабженрегулятором хода, подключенньм к еговыходу регулятором скорости, входсерводвигателя соединен с выходомрегулятора скорости, выход одного1 иэ позиционных датчиков соединен содним иэ входов регулятора хода,датчиком 3, установленным на радиальном ползуне 2, радиальный при-,вод 4, кинематически связанный с радиальным:ползуном 2, тангенциальный,полэун 5 с кинематически связаннып,с ним тангенциальннм позиционнымдатчиком 6, установленный на тангенциальном полэуне 5 осевой ползун 7с кинематически связанным с ним осевым позиционным датчиком 8 и с дат-,чиком 9 линейных перемещений, расположенный на радиальном ползуне 2поворотный стол 10 для установкиконтролируемой детали 11 с кинематически связанным с ним поворотным по. зиционным датчиком 12, привод 13вращения, кинематически связанный 10с поворотным. столом 10, тангенциальный привод 14, кинематически связанный с тангенциальным ползуном 5,осевой привод 15, кинематическисвязанный с осевым полэуном 7, три 15регулирующих контура; регулирующийконтур 16 привода 13 вращения, ре.гулирующий контур 17 тангенциальногопривода 14 и регулирующий контур 18осевого привода 15, каждый из которых состоит (фиг. 5 ) из тахогенерато-ра 19, кинематически связанного сним серводвигателя 20, кинематически связанного с соответствующим датчиком, например осевым позиционнымдатчиком 8, электронный блок 21управления и обработки данных, входы которого электрически соединеныс выходами позиционных датчиков6, 8 и 12, регулирующих контуров 16, .17 и 18 и датчика 9 линейных перемещений. Каждый регулирующий контур16, 17 и 18, кроме того, снабженфиг. 5 ) регулятором 22 хода, подключенным к его выходу регулятором 23скорости, вход серводвигателя 20 35соединен с. выходом регулятора 23скорости, выход позиционного датчика,например, датчика 8, соединен с од-ним из входов регулятора 22 хода,а выход тахогенератора 19 подключенк второму входу регулятора 23 екорости.Электронный блок 21 управления иобработки данных содержит соединенныепоследовательно вычислитель 24 корректирующего сигнала и вычислитель 25погрешности и имеет выводную клемму26 для подключения регистратора,а также выходные клеммы 27, 28и 29 для подключения указателей положения соответствующих позиционных50датчиков.1При этом устройство снабженоуправляющим тактовым генератором30 (фиг. 2, 3 и 4,), выход которогосоединен с вторым входом регулятора22 хода регулирующего контура 16привода 13 вращения, преобразователем 31 углового перемещения в ли-.нейноесоединенным с выходом пово-.ротного позиционного датчика 12, 60вычислителем 32 положения тангенциального ползуна 5, вход которогосоединен с выходом преобразователя31 углового перемещения в линейное,переключателем 33, связанным выхо дом с одним из входов вычислител.24 корректирующего сигнала, а выходом - с вторым входом регулятора22 хода регулирующего контура 17тангенциального привода 14,Кроме того, устройство снабженовычислителем 34 положения осевогоползуна 7, вход которого,связан свыходом поворотного позиционного датчика 12, и переключателем 35, связанным входом с,одним из выходоввычислителя 34 положения осевогополэуна 7, а выходом - с вторим вхЬдом регулятора 22 хода регулирующегоконтура 18 осЕвого привода 15.Устройство снабжено также управляющим тактовым генератором 36, выходкоторого соединен с вторым входомрегулятора 22 хода регулирующегоконтура 18 осевого привода 15, преобразователем 37 углового перемещения в линейное, соединенным с выходом осевого позиционного датчика 8,вычислителем 38 положения поворотного стола 10, соединенным с выходом осевого позиционного датчика 8,переключателем 39, связанным входомс одним из выходов вычислителя 38положения поворотного стола 10,а выходом - с вторым входом регулятора 22 хода регулирующего контура16 привода 13 вращения.Устройство работает следующимобразом.При контроле, например, профилязуЬа контролируемой детали 11 радиальный ползун 2 (фиг. 1) посредствомрадиального привода 4 перемещаютв положение, в котором датчик 9 линейных перемещений контактирует сзубом на радиусе основной окружностиконтролируемой детали 11 (зубчатогоколеса ). Это положение радиальногоползуна 2 контролируется посредствомрадиального позиционного датчика 3и подключенного к выходной клемме27 указателя положения (не показан)радиального ползуна 2.Затем осуществляется обкат контролируемой детали 11 (зубчатогоколеса ) и датчика 9 линейных пере-,мещений, причем зубчатое колесо выполняет вращательную составляющуюобкатывающего движения, совершаяповороты с поворотным столом 10вокруг своей оси, в то время как датчик 9 линейных перемещений выполняет линейную составляющую обкатывающего движения за счет перемещениятангенциального ползуна 5,Поворотный стол может быть неподвижно закреплен на станийе 1, В этом случае необходимо, чтобы посредством перемещения тангенциаЛьного полэуна 5 устанавливался контакт датчика 9 линейных перемещений с зубом контролируемого колеса на радиусе основной окружности, например, за30 При контроле угла наклона зубьев тактовый генератор 36 управляет движением осевого ползуна 7 и, таким образом, он принимает на себя ведущую Функцию. Сигналы осевого позиционного датчика 8 фиксирует указатель не показан )положения осевого полсчет расположения тангенциальногоползуна 5. на радиальном ползуне.Тогда этот радиальный ползун долженбыть оснащен. радиальным приводом,радиальным позиционным датчикоми другими элементами, 5Каждый из регулирующих контуров16, 17 и 18 независимо от того,обслуживает ли он привод 13 вращенияповоротного стола, тангенциальныйпривод 14 или осевой привод 15 10фиг. 2, 3 и 4), имеет одинаковуюпринципиальную конструкцию, показан-,ную на фиг. 5. Серводвигатель 20 получает сигналы, например, от регулирующего контура 18 осевого при-.вода 15 и кинематически связан стахогенератором 19, посылающим сигналы к регулятору 23 скорости, расположенному, например, внутри регулирующего контура 18 осевого привода 15. Соответствующий датчик например осевой позиционный датчик 8,соединен с вторым входом регулятора 22 хода, расположенного, например,внутри регулирующего контура 1825осевого привода 15.Таким образом, каждый регулирующий контур 16, 17 и 18 является составной частью двух регулирующихконтуров, а именно контура позиционного регулирования, на которыйв качестве регулирующей велйчиныпоступает величина заданного положения того из приводов, который независит от соответствующего позиционного контура позиционного регулирования.Для контроля профиля зуба контролируемой детали 11 тактовый генератор 30 фиг. 2 ) управляет поворотным столом 10, так что он выполняет 40ведущую функцию. Регулирующим конту ром 16 привода 13 вращения устанавливается угловое положение поворотного стола 10 относительно определенного нулевого положения, Вычислитель 32 положения тангенциальногоползуна преобразует его путем умножения на установленный радиус основнойокружности в заданное положение, которое должен бып, бы занять тангенциальный ползун 5, если бы имело место свободное от погрешностей движе- .ние обкатки.Посланный вычислителем 32 положения тангенциального.ползуна 5 сигнал вводится через переключатель35 в качестве регулирующей величиныв регулирующий контур 17 тангенциального привода и в вычислитель 24корректирующего сигнала,. Вычислитель 24 корректирующего сигнала 60получает, кроме того, соответствую-.щий действительному положению тангенциального ползуна 5 сигнал от тан- .генциаЛьного позиционного датчика 6и образует путем вычитания обоих . 65введенных в него сигналов корректирующий сигнал. Вычислитель 25 погрешностей, кроме корректирующего сигнала, получает также сигнал от датчика 9 линейных перемещений, .соответствующий его отклонению. Так как это отклонение зависит от погрешности движения обкатки и от погрешности профиля зуба в контролируемой точке, вычислитель 25 погрешностей вычитает один введенный в него сигнал из другого для.получения истинной погрешности профиля, Эту погрешность фиксирует регистратор (не показан ), подключенный к клемме 26 вычислителя 25 погрешностей, именно в зависимости от фактического положения тангенциального ползуна 5, фиксируемого указателем (не показан )положения тангенциального ползуна, подключенного к клемме 28 электронного блока 21. В это же время остающееся неизменным при контроле профиля зуба положение осевого ползуна 7 фиксируется указателем не показан )положения осевого ползуна, подключенным к клемме 29 электронного блока 21.Если контролируемая деталь 11 представляет собой зубчатый шнек, у которого нужно проконтролировать погрешность шага, то поворотным столом 10 управляет тактовый генератор 30. Сигнал с поворотного позиционного датчика 12 преобразует в заданное положение осевого ползуна 7 фиг. 3 ) вычислитель 34 положения осевого ползуна путем умножения на заданные параметры, характеризующие шаг,. Сигнал вычислителя 34 положения осевого ползуна 7 вводится через переключатель 33 в виде регулирующей величины в осевой регулирующий контур 18 осевого привода 15 и в вычислитель 24 корректирующего сигнала. Вычислитель 24 корректирующего сигнала получает, кроме того, соответствующий действительному положению осевого ползуна 7 сигнал от осевого позиционного датчика 8 и путем вычитания введенных в него сигналов образует корректирующий сигнал, направляемый в вычислитель 25 погрешностей. Вычислитель 25 погрешностей получает, кроме того, сигнал от датчика 9 линейных перемещений и определяет путем вычитания обоих сигналов погрешность шага, которую фиксирует регистратор (не показан ), подключенный к клемме 26.йуна 7, подключенный к клемме 29 электронного блока 21, и преобразу ет, вычислитель 38 положения поворбтного стола 10 в заданное положение, которое поворотный стол 10 занял бы в случае свободного от погрешностей его движения, путем умножения . на тангенс угла наклона зубьев контролируемой детали 11 в сигнал угла поворота. Этот сигнал через переклю" чатель 39 направляется в качестве регулирующей величины в регулирующий контур 1 б привода 13 вращения и в вычислитель 24 корректирующего сигнала. Вычислитель 24 корректирующего сигнала второй сигнал о действительном положении поворотного стола 10 получает от поворотного позиционногодатчика 12 через преобраэователь 37. углового перемещенияв линейное. Иэих двух введенныхв него сигналов вычислитель 24 образует корректирующий сигнал и передает его вычислителю 25 погрешностей.5 Вычислитель 25 в качестве второгосигнала использует сигнал от датчи"ка.-9 линейных перемещений и путемвычитания обоих сигналов вычисляетпогрешность наклона зуба. Эту по 10 грешность фиксирует регистратор непоказан )погрешностей в функцииосевой позиции,Применение изобретения позволитповысить точность контроля в 1,5 ра 5 за и сократить время контроля на25. Изобретение можно использоватьво всех отраслях промышленности,где есть производство зубчатых колес.1061707 Составитель Б.АфонскийТехред Х,Надь , Корректор С.Шекма Редактор Л.Алексеенк Заказ 10073/б е Филиал ППП "Патент", г. Ужгород, ул. Проектная ВНИИПИ по д 113035ираж осуд ам и Моск 0.2 Подписноственного комитета СССРбретений и открытийЖ, Раушская наб , д.
СмотретьЗаявка
2872152, 16.01.1980
АРМИН ШТЕРКИ, ГЕРД РОБЕРТ ЗОММЕР
МПК / Метки
МПК: G01B 5/20
Метки: зубчатых, колес, параметров
Опубликовано: 15.12.1983
Код ссылки
<a href="https://patents.su/8-1061707-ustrojjstvo-dlya-kontrolya-parametrov-zubchatykh-koles.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для контроля параметров зубчатых колес</a>
Формирователь импульсов датчика положения

Номер патента: 1238038
Опубликовано: 15.06.1986
Авторы: Архипов, Малюк, Урмаев
МПК: G05B 19/406
Метки: датчика, импульсов, положения, формирователь
...в состав которого входят элементы ИСКЛЮЧАЮЩЕЕИЛИ 15 - 18 и элементы И 19 и 20.На фиг. 2 обозначено: Б - напряжение, 1 - время, а - выход генератора 20тактовых импульсов 13, Вх, 1 - вход 1 формирователя, Вх. 2 - вход 2 формирователя, б - выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 5, в - выход элемента И 9,г - прямой выход Р-триггера 1, д - прямой выход Р-триггера 1, г - инверсный25выход Р-триггера 1, д - инверсный выходР-триггера 3, е - прямой выход Р-триггера 2, ж - прямой выход Р-триггера 2,з, к, л, м - соответственно выходы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 15 - 18, Вых. 1- первый выход формирователя, Вых. 2 - второй выход формирователя, 10 - момент времени поступления очередного сигнала по входу 1, 1 - момент времени появления помехи.Формирователь...
Устройство для контроля датчика положения

Номер патента: 489085
Опубликовано: 25.10.1975
Авторы: Андрюков, Неплохов, Шварцман
МПК: G05B 23/02
...на сбро"а 2 1.7;".ЛЧгна;аГа таГОВОУ 0 ЯВИаТАИЛИф:,г ) Ига СгДгаЧЩСВ ДОЛ;",С 4 т 7 гоыт . а;Овьг Чт-г,:=, С; И ТОЛЬГО В ОДЧСМ Гу лРВОМ лодгХ,е КИИ аГОВОгго ДБгЯТЕгг рОЧСХодгт " раг гг 2 лОВга и ОднСла даггг.,с случае неисправности датчика 1 или усилители 4 типа ерегор,ние ампо:п,и огСУГС ВИ: ЧУлс ВгтЕЛЬгголлгг УУОлиодагВИ 8 ЧУВСТВРР 8 ЛЬНОСТИгСггдиЕЛ т,ф 1Во всех положениях датчпса 1 на выходе усилителя 4 будет сигнал О,Следователь НО ИадигИЕ СГггкада гг( гг В ДВгх СОСЕДгИХ ПОЛОЖЕНКИХ Вана датчгжа 1 СВИдЕТЕЛЬСтву= ет о е 0 неисправиостгиР ГСГщМО-ЛИ 1 Сг";.ггайг.-ГД; ДаГЦгСРУЛ .ОГО 0 ЧОЖЕНИЯ НРИСГгРЯВЕИ," :10 г зом Рл Ь лоДЭ "ГСИЛИТЕпя уСтакаВЧИВЯЕТСЯ урОВЕНЬ "О" а ка Выходе иивеитора 2:-уровеньЕРВЫИ гомаНЦНЫЙ ИПГГГЬС ГОООДЧ ч 80 ез...
Индукционный дифференциальный датчик положения кромок свариваемого стыка

Номер патента: 577106
Опубликовано: 25.10.1977
Авторы: Алилуев, Васильев, Закс, Сливец, Харченко, Цыганков
МПК: B23K 9/10
Метки: датчик, дифференциальный, индукционный, кромок, положения, свариваемого, стыка
...поля, создаваемого током, проходящим по проводнику, замыкающегося через сердечник.Таким образом, Фаза Э Д С, наводимой в обмотке 4, указывает направление 3 смещения оси центрального стержня сердечника относительно максимума вектора, положение которого соответствует положению оси проводника, по которому протекаетток, создающий магнитное поле. ЮПреобразователь 5 усиливает сигнал выходной обмотки 4, анализирует его Фазу и преобразует ее в сигнал постоянногоуровня, который поступает на привод б и является для него командой пе ремещения датчика в сторону максимума вектора до совмещения с ним оси выходной обмотки 4. В момент совмешения перемешение прекращается так как Э Д С, наводимая в обмотке 4, равна нулю, по скольку результирующий...
Датчик положения перемещающегосятела
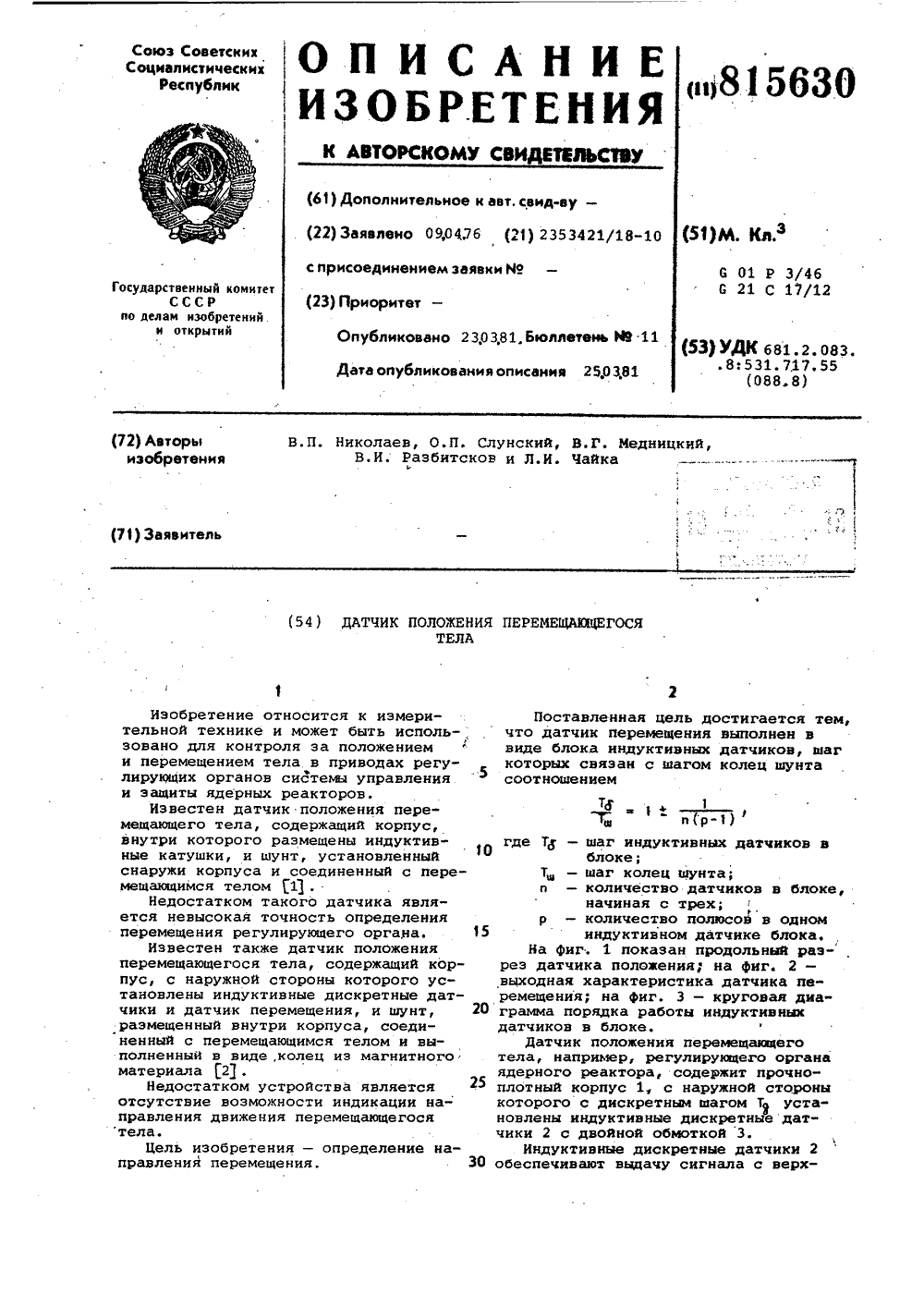
Номер патента: 815630
Опубликовано: 23.03.1981
Авторы: Медницкий, Николаев, Разбитсков, Слунский, Чайка
МПК: G01P 3/46
Метки: датчик, перемещающегосятела, положения
...как это показано на круговой диаграмме (фиг.3)для блока иэ трех датчиков б. Числа1, 2, 3 указывают порядковый номериндуктивных датчиков б и соответствующие им выходные сигналы (Фиг.2),По чередованию выходных сигналовдатчиков б (1, 2, 3 или 1, 3, 2) определяют направление перемещения тела. него торца шунта 4, в котором связанрегулирующий орган (на чертеже не показан).Для контроля эа перемещением шунта 4 внутри эоны каждого дискретногошага Т ниже дискретных датчиков 2с наружной стороны корпуса 1 установлен датчик 5 перемещения в виде блока, состоящего из и отдельных индуктивных датчиков б.Шунт 4, расположенный внутри кор.пуса 1, выполнен в виде эквидистант-ного набора магнитных (Ферромагнитных) колец 7, надетых на немагнитнуюштангу 8 и...
Датчик положения кромки свариваемого изделия

Номер патента: 1109275
Опубликовано: 23.08.1984
Автор: Кудриченко
МПК: B23K 9/10
Метки: датчик, изделия, кромки, положения, свариваемого
...8 и 9, шарнирно закрепленных нод углом друг к другу на корпусе 1. На противоположных плечах рычагов 2 и 3 установлены постоянные магниты 10 и 11, Дополнительный контактный ролик 12 с осью вращения, перпендикулярной осям вращения роликов 4 и 5 установлен в каретке 13, сопряженной поверхностями 14 с осями 6 и 7 роликов 4 и 5. Каждый из постоянных магнитов 10 и 11 воздействует на коммутирующие устройства, например герконов 15-18. При этом расстояние между ними выбрано таким образом, что для каждого рычага 2 и 3 существует промежуточное положение, при котором магниты 10 и 11 не воздействуют ни на один из соответствующих им герконов 15-18. Величина этого расстояния равна полю допуска на положение сварочного инструмента относительно...
Предыдущий патент: Способ управления загрузкой и разгрузкой топки (варианты)
Следующий патент: Взвешивающее устройство
Случайный патент: Центрифуга