Датчик положения перемещающегосятела
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 815630
Авторы: Медницкий, Николаев, Разбитсков, Слунский, Чайка
Текст
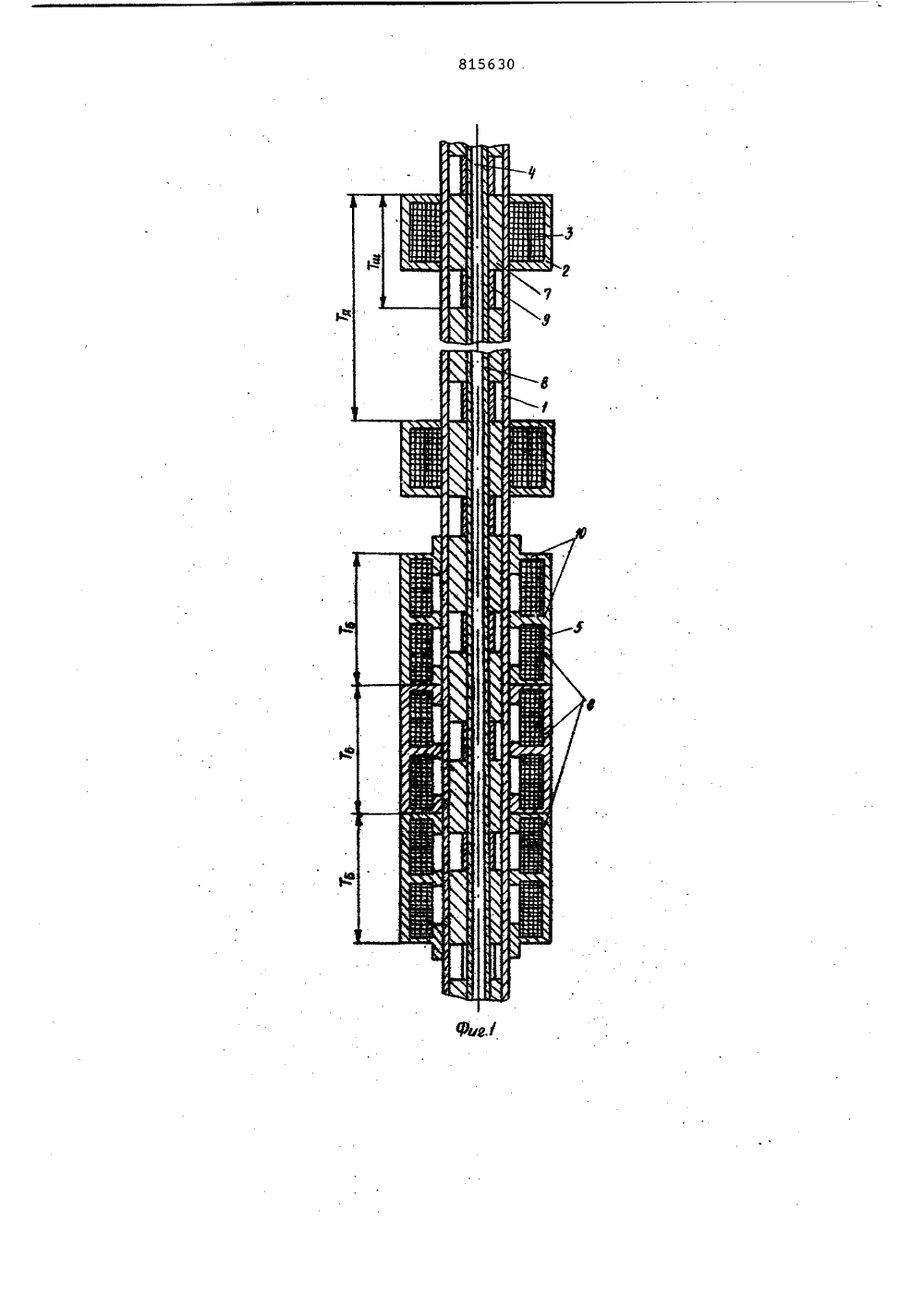
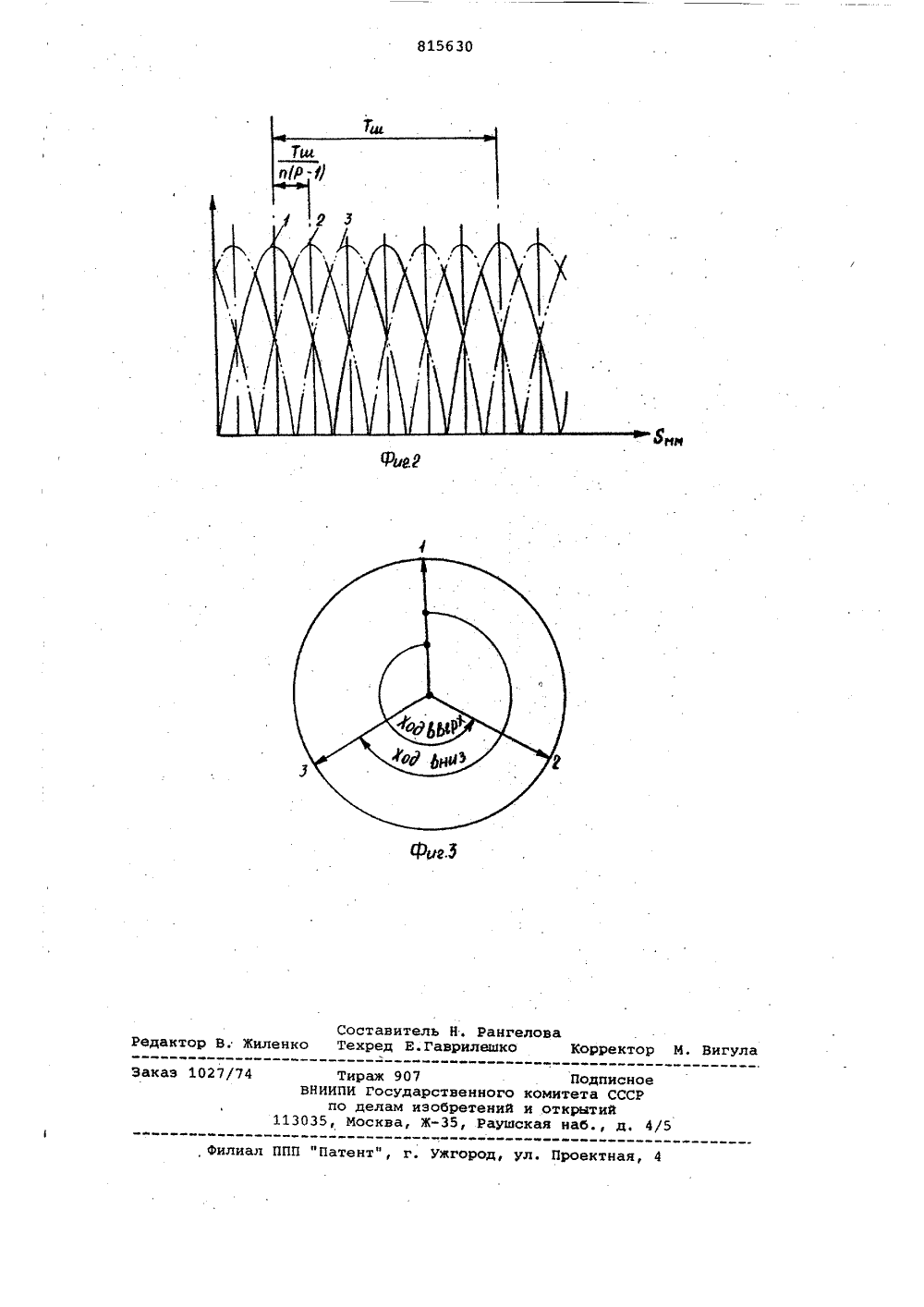
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИ ВТИЗЬСМВУСоюз Советскик Социалистических Республик(22) Заявлено 090476 (21) 2353421/18-10с присоединением заявки Мо(23) ПриоритетОпубликовано 230381. Бюллетень ЙВ.11Дата опубликования описания 250381 Р 1)М К 3 С 01 Р 3/46С 21 С 17/12 Государственный комитет СССР по делам изобретений и открытий(54) ДАТЧИК ПОЛОЖЕНИЯ ПЕРЕМЕЩАХЩЕГОСЯ ТЕЛАТ 3 дГ и (р) Изобретение относится к измерительной технике и может быть использовано для контроля за положениеми перемещением тела в приводах регулирующих органов системы управленияи защиты ядерных реакторов.Известен датчик положения перемещающего тела, содержащий корпус,внутри которого размещены индуктивные катушки, и шунт, установленныйснаружи корпуса и соединенный с перемещающимся телом 11 .Недостатком такого датчика является невысокая точность определенияперемещения регулирующего оргаНа.Известен также датчик положенияперемещающегося тела, содержащий корпус, с наружной стороны которого установлены индуктивные дискретные датчики и датчик перемещения, и шунт,размещенный внутри корпуса, соединенный с перемещающимся телом и выполненный в виде, колец из магнитного:материала 21 .Недостатком устройства являетсяотсутствие возможности индикации направления движения перемещающегосятела.Цель изобретения - определение направления перемещения,Поставленная цель достигается тем,что датчик перемещения выполнен ввиде блока индуктивных датчиков, шагкоторых связан с шагом колец шунтасоотношением где Тт - шаг индуктивных датчиков вблоке;Т, - шаг колец шунта;о - количество датчиков в блоке,начиная с трех;р - количество полюсов в одном 35 индуктивном датчике блока.На фиг. 1 показан продольный разрез датчика положения; на фиг. 2 -выходная характеристика датчика перемещения; на фиг. 3 - круговая диа грамма порядка работы индуктивныхдатчиков в блоке.Датчик положения перемещающеготела, например, регулирующего органаядерного реактора, содержит прочноплотный корпус 1 с наружной стороныкоторого с дискретным шагом Т установлены индуктивные дискретные датчики 2 с двойной обмоткой 3Индуктивные дискретные датчики 2 30 обеспечивают выцачу сигнала с верх 815630ность определить от какого датчика 2поступает сигнал.Для большой точности внутри дискретного шага Т (т.е. между ииуктивными датчиками 2) положение пере-мещающегося тела определяется с помощью датчика 5 перемещения.Выполнение в блоке индуктивныхдатчиков б с шагом Т, отличным отшага шунта Тш на величину + 10 щ . и 1 р где в частном случае и = 3 н р = 3,позволяет при перемещении шунта 4 наодин шаг Тш дважды поочередно замыкать шунтом 4 магнитную цепь в ин-дуктивных датчиках б и обеспечиваетТвыход сигналов с интерваломи р в строгой очередности (см. Фиг. 2),например 1, 2, 3 при ходе вниз и ф 1 3 2 при ходе вверх как это показано на круговой диаграмме (фиг.3)для блока иэ трех датчиков б. Числа1, 2, 3 указывают порядковый номериндуктивных датчиков б и соответствующие им выходные сигналы (Фиг.2),По чередованию выходных сигналовдатчиков б (1, 2, 3 или 1, 3, 2) определяют направление перемещения тела. него торца шунта 4, в котором связанрегулирующий орган (на чертеже не показан).Для контроля эа перемещением шунта 4 внутри эоны каждого дискретногошага Т ниже дискретных датчиков 2с наружной стороны корпуса 1 установлен датчик 5 перемещения в виде блока, состоящего из и отдельных индуктивных датчиков б.Шунт 4, расположенный внутри кор.пуса 1, выполнен в виде эквидистант-ного набора магнитных (Ферромагнитных) колец 7, надетых на немагнитнуюштангу 8 и разделенных немагнитнымикольцами 9.В блоке у каждого индуктивногодатчика б количество полюсов 10 может быть равным двум или трем, оно вы. бирается в зависимости от необходимого интервала между выходными сигналами датчика перемещения. Так, дляиндуктивных датчиков б, выполненныхс двумя полюсами 10, интервал междусигналами равен 1/и шага Т, шунта 4,а для индуктивных датчиков б, выполненных с тремя полюсами 10, интервалмежду сигналами равен 1/2 и шага Тшшунта 4,Минимальное количество индуктивных датчиков 6 в блоке может бытьравным трем. Наибольшее - любое натуральное число, начинаяс трех.Варьируя количеством индуктивныхдатчиков б и количеством полюсов 10,можно получить любой интервал междусмежными выходными сигналами датчика перемещения, при этом индуктивныедатчики б могут быть выполнены какдвухобмоточными,соединенными по трансФорматорной схеме, так и четырехобмоточными, соединенными по мостовойсхеме.На Фиг. 1 показан датчик положения, у которого блок датчика 5 перемещения содержит минимальное количество индуктивных датчиков б, т.е.три, а каждый датчик б состоит изтрех полюсов 10, между которыми попарно расположены четыре обмотки,соединеиные по мостовой схеме.Датчик положения работает следующим образом.Положение шунта 4 определяетсяпо совместным показаниям дискретныхдатчиков 2 положения и датчика 5 перемещения, содержащего блок из трехиндуктивных датчиков 6.Когда верхний торец шунта 4 доходит до второго полюса какого-либодатчика 2,. то на выходе этого датчика появляется сигнал, пропорциональный положению перемещающегося тела,при этом каждый датчик 2 имеет своеприемное устройство, что дает возможФормула изобретенияДатчик положения перемещающегосятела, содержащий корпус, с наружной стороны которого установлены индуктивные дискретные датчики и перемещения, шуит, размещенный внутри корпуса, соединенный с перемещающимся телом ивыполненный в виде колец из магнитного материала, о т л и ч а ю - 40 щ и й с я тем, что, с целью определения направления перемещения, датчик перемещения выполнен в виде блока индуктивных датчиков, шаг которых связан с шагом колец шунта соотно шением где Т 6 - шаг индуктивных датчиковв блоке датчика перемещенияТ, - шаг колец шунта,и - количество датчиков в блоке,начиная с .трех;р - количество полюсов в одноминдуктивном датчике блока.55 Источники информации,принятые во внимание при экспертизе1. Патент франции 9 2169437,кл. 6 21 С 17/10, опублик. 1973.2. Авторское свидетельство СССРр В 525165, кп. 6 21 С 17/12, опублик.1973 (прототип).815630 Составитель Н. Рангеловаедактор В. Жиленко Техред Е.Гаврилешко Корректор игул аказ 1027/74 НИ п 35, филиал ППП "Патент", г. Ужгород, ул. Проектная,ираж 907 И Государс делам иэо Москва, Ж Подписно енного комитета СССР етений и открытий Раушская наб., д,
СмотретьЗаявка
2353421, 09.04.1976
ПРЕДПРИЯТИЕ ПЯ Г-4781
НИКОЛАЕВ ВЛАДИМИР ПЕТРОВИЧ, СЛУНСКИЙ ОЛЕГ ПАВЛОВИЧ, МЕДНИЦКИЙ ВИКТОР ГЕОРГИЕВИЧ, РАЗБИТСКОВ ВАЛЕРИЙ ИВАНОВИЧ, ЧАЙКА ЛЕОПОЛЬД ИОСИФОВИЧ
МПК / Метки
МПК: G01P 3/46
Метки: датчик, перемещающегосятела, положения
Опубликовано: 23.03.1981
Код ссылки
<a href="https://patents.su/4-815630-datchik-polozheniya-peremeshhayushhegosyatela.html" target="_blank" rel="follow" title="База патентов СССР">Датчик положения перемещающегосятела</a>
Горизонтальный бесконечный транспортер для перемещения листового материала в наклонном положении

Номер патента: 82813
Опубликовано: 01.01.1950
Авторы: Резников, Чмыхов, Шукевич
МПК: B65G 17/06, B65G 17/46, B65G 21/20
Метки: бесконечный, горизонтальный, листового, наклонном, перемещения, положении, транспортер
...ВытяГивз юшцх стекло хзшин 2 к столам д.-а тяговом органе (фиг. 3) - стаьОх канате 4 транспортера закрепленыоойхь з К кзкдой из Обоим О реццтся проуцинз б (фиг.4), нз хностовцке кото 10 закрспле нес, цИй ОрГзн 7 с двумя пзльцзмц ц пружинами 8 (фиг. 4), а также напранляоший ролик 9, ЗеревяНые цс.,шие планки 10 прикреплены к металлцчсскои пластцне 11. НесуцНй орган 7 (фиг. 3 ц 4) прц своем перемегцеццц спрзется роликами 12 на угслксныс шины 1 о, проложенные по всей трассе.82813Для прохождения поворотной части транспортера несущие планки могут свободно перемешаться в радиальном направлении, что устраняет возникновение изгибающих усилий в листе 14.Для поддержания листа 14 в вертикальном положении в местах поворота трассы в транспортере...
Гидравлический датчик линейных и круговых перемещений

Номер патента: 144367
Опубликовано: 01.01.1962
Авторы: Рабинович, Чередниченко
МПК: G01B 13/00, G01D 5/42
Метки: гидравлический, датчик, круговых, линейных, перемещений
...датчика создаются гидравлические импульсы с частой, зависящей от скорости вращения диска и шага канавок. В зависимости от необходимого числа импульса за оборот диска или требуемой точности отсчета датчик может выполняться с различными диаметром диска 1 и шагом канавок 6.Для увеличения точности отсчета перемещений возможно применять датчики с большими диаметрами диска и числом канавок, а также дополнительные приемники,Гидравлические импульсы на выходе датчика в зависимости от системы управления могут быть использованы дискретно или функционально. В последнем случае необходимо обеспечение не только требуемого количества импульса, но и непрерывного потока жидкости, поступающей в систему управления.В примере выполнения датчика,...
Высокочастотный датчик угловых перемещений

Номер патента: 374648
Опубликовано: 01.01.1973
Авторы: Голованов, Пяг, Сметании
МПК: G01B 7/30
Метки: высокочастотный, датчик, перемещений, угловых
...представленных на фиг. 1 и фиг. 2. Соответственно во столько же раз сокращаются угловые (тангенциальные) размеры рамок статора и секторов ротора.Работает датчик следующим образом.Вследствие того, что однофазная обмотка 6 размещена в непосредственной близости от лобовых частей рамок двухфазных обмоток 5, 5, лобовые части являются рабочими и засчет них обеспечивается индуктивная связь участков двухфазных и однофазных обмоток.Так как каждая из двухфазных обмоток 5, 5 содержит четное число одинаковых рамок, включенных попарно встречно, связь между любой из двухфазных обмоток в целом и однофгзной обмоткой при извлеченном роторе отсутствует. Секторы ротора д, 4, число которых равно числу рамок двухфазной обмотки статора, выполнены через...
Трансформаторный датчик линейных перемещений

Номер патента: 994908
Опубликовано: 07.02.1983
Автор: Едуш
МПК: G01B 7/00
Метки: датчик, линейных, перемещений, трансформаторный
...от другого немагнитными металлическими пластинами 4, например, медными. На четных зубцах стержня 2 размещены секции обмотки 5 возбуждения, включенные последователь. 8 4но. Между зубцами на стержне 2 размещены секции измерительной обмотки 6,включенные встречно. На гладком стержне 1 размещен подвижный элемент 7, .связываемый в процессе измерений сконтролируемым объектом (не показан)и выполненный в виде двух жестко закрепленных одна относительно другойобмоток 8 и 9 и двух трехэлементныхреактивных двухполюсников 10 и 11,каждый из которых подключен к отдельной обмотке, Элементы двухполюсников выбраны такими, чтобы частота резонанса токов в одном из двухполюсников совпала с частотой резонанса напряжения в другом и наоборот.Датчик работает...
Дистанционный датчик линейных перемещений

Номер патента: 1627819
Опубликовано: 15.02.1991
МПК: G01B 7/00
Метки: датчик, дистанционный, линейных, перемещений
...(Ь), начального 40уровня (с)Для исключения влияниятрех нестабильных коэффициентов нарезультат измерения (х) в предлагаемом датчике проводятся 4 такта измерения, в каждом из которых информация снимается с одной из четырех идентичных одна другой секций катушки2: 3-4, 5-6, 7-8, 9-10. Соседние сек ции 3-4 и 7-8, а также 5-6 и 9-Осмещены одна относительно другой наизвестное расстояние ЬПри подаче по двухпроводной линии32 связи на датчик напряжения постоянного тока от удаленного вторичногоизмерительно-регистрирующего прибо 55ра (не показано) на выходах формирователя 31 двухполярного напряженияформируются напряжения +1, и -1,поступающие на соответствующие шины питания элементов датчика, При этом двоичный счетчик 26 блока 27...
Предыдущий патент: Электрокинетический датчикугловой скорости
Следующий патент: Измеритель относительных значенийразности скоростей
Случайный патент: Устройство для загрузки при испытаниях трактора на полигоне