Манипулятор модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1775289
Авторы: Петриковец, Филонов


Текст
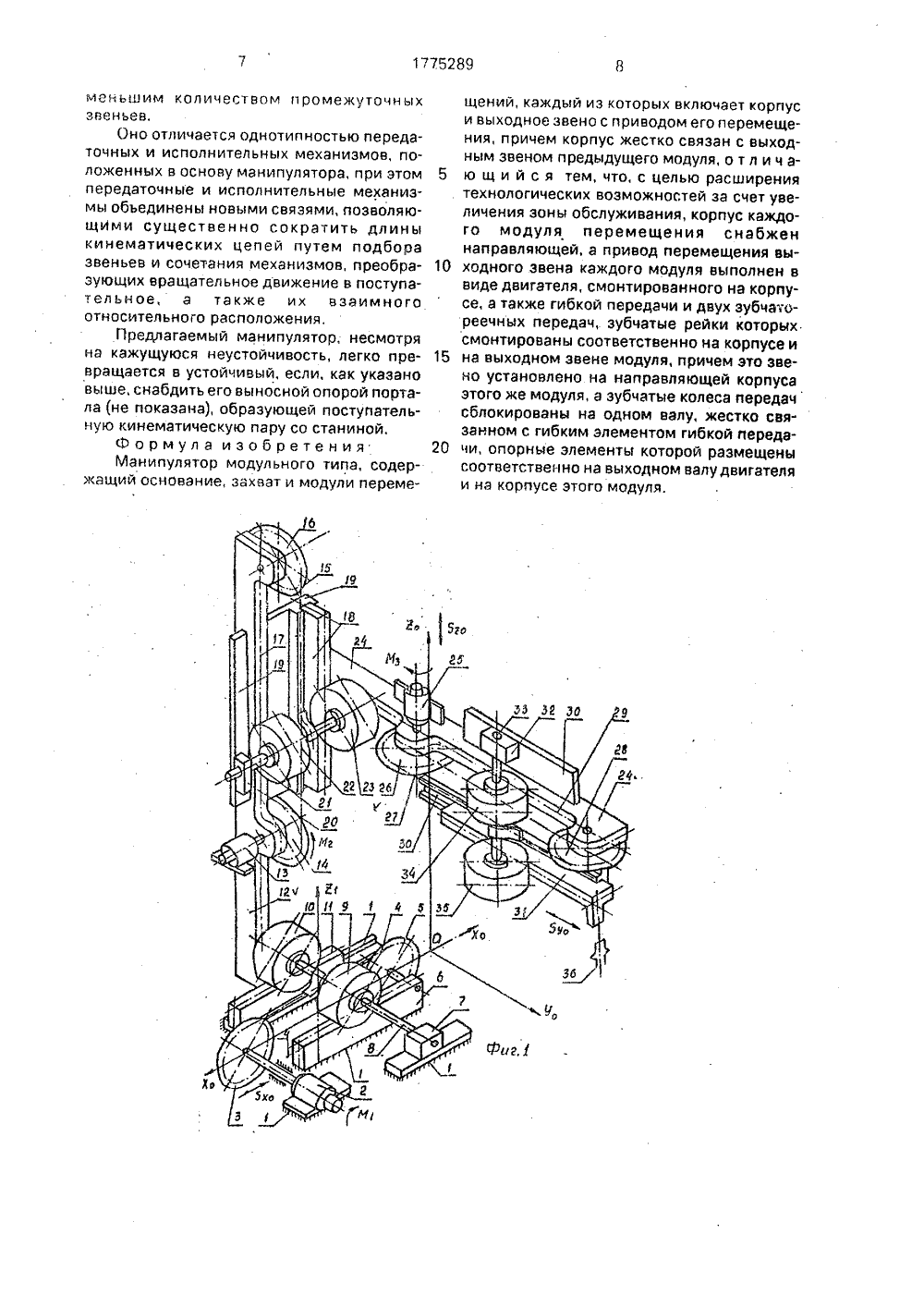
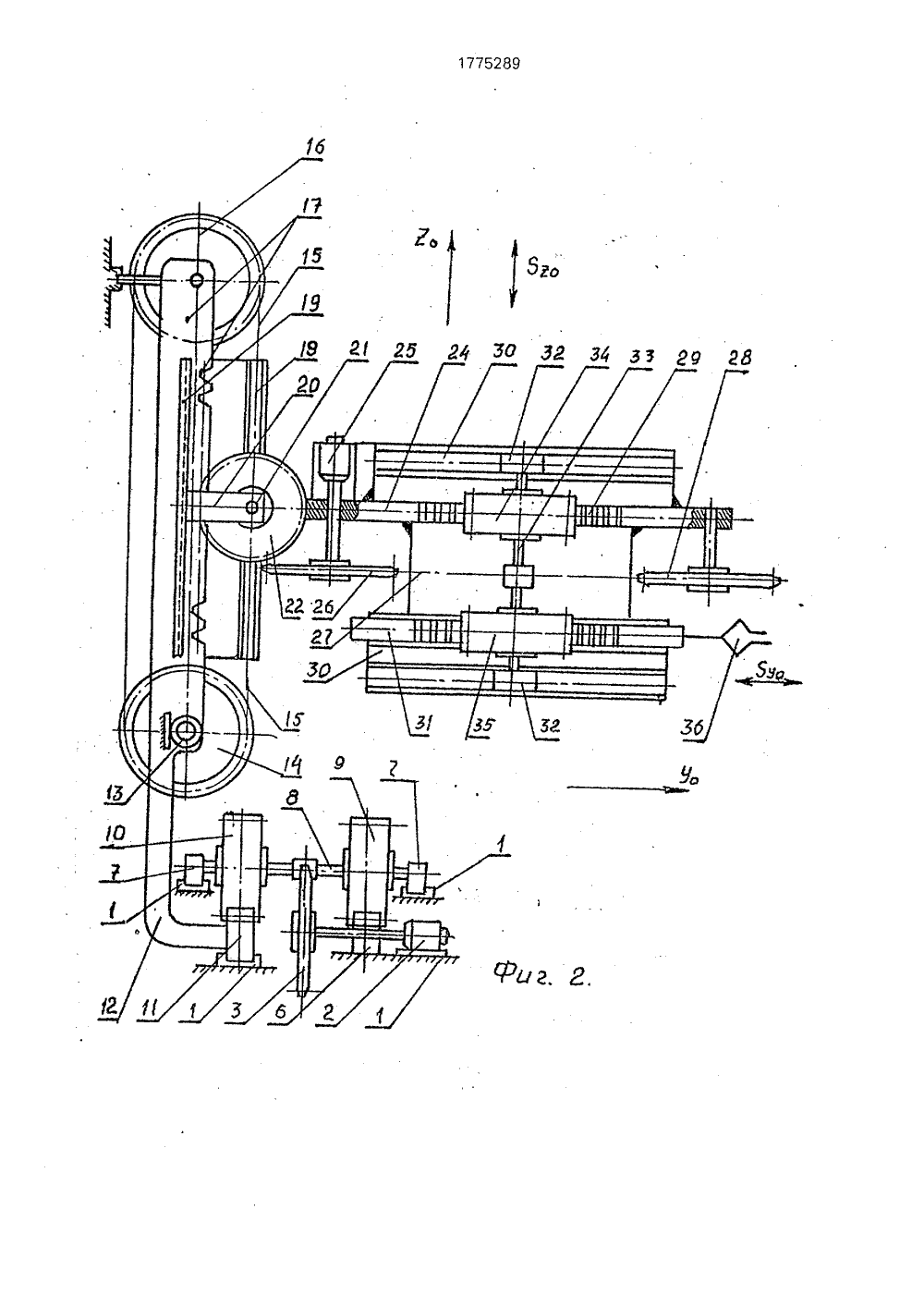
1775289 А 1 СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 19) 5 В 25 3,9/08//В 25 3 9/02 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТПРИ ГКНТ СССР ПИСАНИЕ ИЗОБРЕТЕНИЯАВТОРСКОМУ СВИДЕТЕЛЬСТВУ(21) 4844269/О (22) 04,04.90 (46) 15.11.92. Б (71) Белорусски (72) И.П.Филон (56) Авторское М 1558663, кл,включа е звено де двиг ибкой переда ответств ене мо ованы с гибким ные эле твенно пусе эт модуля предыду юл. %42 й политехн ов и И.П.Пе свидетельс В 253 9/08 ческий институтриковецво СССР1988. Изоб ляющих последовательно расположены продольная, поперечная и вертикальная каретки и трособлочную систему с противовесами, блоки которой смонтированы на портале и каретках и выполненную в виде двух тросов. один конец каждого из которых закреплен на портале, э другой - на соответствующем противовесе, при этом один трос последовательно охватывает блоки поперечной и вертикальной кареток, а другой - блоки поперечной каретки.Известное техническое решение требует наличие приводов, имеющих большое количество звеньев. Это связано с тем, что в основу конструкции положены традиционные механизмы, не позволяюшие обзспечить большое передаточное отношение, При этом передаточные и исполнительные механизмы отличаются кинематическими связями, учитывающими последовательное соединение традиционных механизмов, преобразующих вращательное движение ие относится к манипулятоыть использовано в машино(54) МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА (57) Использование: автоматизация всйомогательных операций в машиностроении. Сущность изобретения: манипулятор модульного типа состоит из основания, захвата и модулей перемещений, каждый из рам и может бстроении.Известен манипулятор, содержащий вертикальную поворотную стойку, механическую руку с захватом и приводной электродвигатель.Недостатком известного манипулятора являются повышенные динамические нагрузки в узлах и звеньях манипулятора из-за громоздкости и сложности приводов, которые ведут к снижению надежности и повышению энергопотребления за счет увеличения длины кинематических цепей привода,Известен манипулятор, содержащий вертикальную поворотную стойку, механическую руку с захватом и приводной электродвигатель. который обладает теми же недостатками, что и вышеприведенный.Известен также манипулятор, содержащий портал, на котором с помощью направкоторых еыходно ния вви пусе, г реечных еаны со ном зе сблокир занном чи, опор соответс и на кор каждого звеном ет корпус, направляющую и с приводом его перемещеателя, размещенного на корпередачи и двух зубчаточ, рейки которых смонтироенно на корпусе и на еыходдуля, а зубчатые колеса на одном валу, жестко свяэлементом гибкой переда- менты которой размещены на выходном валудвигателя ого модуля. Причем корпус жестко связан с выходным щего модуля, 3 ил.10 15 20 35 40 50 55 двигателя в поступательное выходнв о звена манипулятора, Кинетическая энергия. акапливаемая такими кинематическими цепями, ограничивает воэможности манипулятора по части его быстродействия и увеличивает погрешности позиционироваНаиболее близким по технической сущности к заявляемому, является манипулятор модульного типа, содержащий последовательно соединенные модули перемещений, первый из которых связан с основанием, а последний - с захватом, причем каждый из модулей включает в себя корпус и привод перемещения и стыковочные элементы, в котором с целью расширения технологических воэмокностей за счет обеспечения инвариантности компоновок, в корпусе каждого модуля перемещения во взаимно перпендикулярных плоскостях выполнены отверстия, а стыковочные элементы выполнен в виде штанг, установленных в отверстия корпусов смежных модулей посредством введенных втулок, причем корпус одного из смежных модулей перемещений установлен с возможностью перемещения вдоль этих штанг, при этом поивод перемещения каждого модуля выполнен в виде зубчато-реечной передачи и силового цилиндра, корпус которого смонтирован на корпусе модуля. а шток жестко связан с рейкой зубчато-реечной передачи,Однако указанный манипулятор в качестве модулей включает в себя механизмы отличаю циеся постоянным передаточным отношением, для изменения которого при переналадке манипулятора требуется большой набор звеньев и понижающих редукторов,Манипулятор кроме злектромеханических связей включает в себя и силовые цилиндры, т,е. поступательное перемещение модулей осуществляется с использованием соеды под давлением, что, естественно, усложняет его конструкци 1 о, а регулирование скорости перемещения связано с трудностямл, арактерными для силовых цилиндров. Аналогично можно сказать и о реверсированли движения. Зти недостатки манипулятора сказываются на усложнении его конструкции и снижении надежности, Следует подчеокнуть, что модульность и инвариантность компоновок с целью расширения технологических возможностей манипулятора реализуется в нем большим коечеством промежуточных звеньев. а увеличение зоны обслукивания ограничено, так как расширение ее связано со значительным увеличением габаритов манипулятора, материалоемкости его и снижениемнадежности.Целью изобретения является расширение технологических возможностей за счетувеличения зоны обслуживания.Поставленная цель достигается тем, чтокорпус каждого модуля перемещения снабжен направляющей, а привод перемещениявыходного звена каждого модуля выполненв виде двигателя, смонтированного на корпусе, а также гибкой пердачи и двух зубчато-реечных передач, зубчатые рейкикоторых смонтированы соответственно накорпусе и на выходном звене модуля, причем это звено установлено на направляющей корпуса этого же модуля, а зубчатыеколеса передач сблокированы на одном валу, жестко связанном с гибким элементомгибкой передачи, опорные элементы которой размещены соответственно на выходном валу двигателя и на корпусе этогомодуля.На фиг,1 изображен манипулятор модульного типа, общий вид; на фиг.2 - вид пооси Хо на фиг,1; на фиг.З - вид по оси У нафиг,1,Манипулятор модульного типа обладаеттремя степенями подвижности, т,е. тремяобобщенными координатами, реализующими движение вдоль взаимно перпендикуля рных осей ХоУоЕо, содержит,установленный на станине (корпус) 1 двигатель 2 (М 1), на выходном валу которого установлено приводное звено 3 трособлочнойсистемы, бесконечный ремень(цепь) 4 которой связан с блоком 5, установленным своэможностью вращения на неподвижнойрейке 6, связанной жестко со станиной 1, Вползуне 7, установленном с возможностьюдвижения вдоль направляющей станины 1,установлен с воэможностью вращения вал8, на котором жестко закреплен блок зубчатых колес 9 и 10, которые отличаются междусобой на незначительное число зубьев (нанезначител ьную величину диаметра),Одна из шестерен 9 входит в зацепление с неподвижной рейкой 6, а вторая шестерня 10 входит в зацепление с рейкой 11,установленной с возможностью поступательного движения в направляющей станины 1 (зубья реек и шестерен условно непоказаны), Описанный привод обеспечивает продольное перемещение (вдоль оси Хо)Ях С подвижной рейкой 11 жестко связан(установлен неподвижно) портал 12, (корпусвторого) на котором установлен двигатель13 (М 2), на выходном валу которого установ.лено приводное звено 14 трособлочной системы, бесконечный ремень (цепь) 15510 20 30 35 40 45 50 которой связан с блоком 16, установленным с возможностью вращения в портале 12, С порталом 12 жестко связана рейка 17, а подвижная рейка 18 установлена с вазмакностью поступательного движения в направляющей 19 портала 12,На той же направляющей 19 с другой стороны портала установлен ползун 20, в котором с возможностью вращения установлен вал 21, нэ котором жестко закреплен блок зубчатых колес 22 и 23 отличающийся между собой на незначительное число зубьев (на незначительную величину диаметра),Одна из шестерен 22 входит в зацепление с рейкой 17, а вторая шестерня 23 входит в зацепление с рейкой 18, установленной (как указано выше) с вазможностью поступательного движения в направляющей 19 портала 12, Зубья реек и шестерен условно не показаны.Описанный привод обеспечивает вертикальное перемещение (вдаль оси Ъ) ЯлС подвижной рейкой 18 жестко связана поперечина 24 (корпус третьего), на которой установлен двигатель 25(МЗ), на выходном валу которого установлено приводное звено 26 трособлочной системы, бесконечный ремень (цепь) 27 которой связан с блоком 28, установленным с возможностью вращения в поперечине 24. С поперечиной 24 жестко связана рейка 29, а в направляющей 30 поперечины установлена с возможностью движения подвижная рейка 31. На тай же направляющей 30 с другой стороны поперечины установлен полэун 32, в котором с возможностью вращения установлен вал 33, на котором жестко закреплен блок зубчатых колес 34, 35 отличающихся между собой на незначительно число зубьев (на незначительную величину диаметра),Одна из шестерен 34 входит в зацепление с рейкой 29, а вторая шестерня 35 входит в зацепление с рейкой 31, на которой установлен схват 36 манипулятора, а сама рейка установлена (как указано выше) с возможностью поступательного движения в направляющей 30 поперечины 24.Зубья реек и шестерен условно не показаны.Описанный привод обеспечивает попе. речное перемещение (вдоль аси У), ЯУ, Для устойчивости манипулятора портал 12 имеет выносную опору, образующую поступательную кинематическую пару (не показанную на чертеже) са станиной 1.Манипулятор мадульнага типа рэбатает следующим образом,Реверсивный двигатель 2 (М 1) вращает приводное звено 3, которое передвигает бесконечный ремень (цепь) 4 и установлен ный на нем вэл 8 блока зубчатых колес 9 и 10, причем шестерня 9 перекатывается па неподвижной рейке 6, а шестерня 10, при этом, перемещае подвижную рейку 11 вместе с порталом 12 вдаль аси Х, Получаел продольное перемещение.Реверсивный двигатель 13 (М 2) вращает приводное звено 14, которое передвигает бесконечный ремень (цепь) 15 и установленный на нем вал 21 блока зубчатых колес 22 и 23, причем шестерня 22 перекатывается по неподвижной рейке 17 портала 12, а шестерня 23, при этом, перемегцает подвижную рейку 18 вместе с поперечиной 24 вдольоси Ео. Получаем вертикальное перемещение,Реверсивный двигатель 25(МЗ) вращает приводное звено 26, которое передвигает бесконечный ремень (цепь) 27 и установленный на нем вал 33 блока зубчатых колес 34 и 35, причем шестерня 34 перекатывается па неподвижной рейке 29 поперечины 24, а шестерня 35 при этом перемещает подвижнуа рейку 31 вместе с схватам 36 вдоль осиУо,Получаем поперечное перемещение, Портал 12 для устойчивости манипулятора имеет выносную опору, образующую поступательную кинематическую пару (не показанную на чертеже) са станиной 1,Предлагаемое техническое решение в отличие аттехническсга решения принятого зэ прототип, хотя и имеет общность в части инвариантнасти компоновки, в качестве модулей включает в себя механизмы отличающиеся большим диапазоном изменения передаточного отношения, который (диапазон) может быть реализован минимальным количеством звеньев без понижающих редукторов,Предлагаемый манипулятор, при однэкды выбранной постоянной длине его звеньев, может сбслужить определенное пространство, а в нем - доставить схват в любую точку, без значительного увеличения длины звеньев в силу более простой конструкции в сравнении с прототипом и того, чта вклачэет в себя талька электромеханические связи, В манипуляторе отсутствуют силовые цилиндры, т.е, поступательное движение вдоль асей координат и регулирование скорости ега не связаны с использован:,:,ем энергии среды под давлением, Вэтой части, надо полагать, чта надежность предлагаемого технического реп ения будет выше в сравнении с прототипом и конструкция ега будет проще, а модульность и инвариантность кампанаеак реализуетсяменьшим количеством промежуточных звеньев,Оно отличается однотипностью передаточных и исполнительных механизмов, положенных в основу манипулятора, при этом передаточные и исполнительные механизмы обьединены новыми связями, позволяющими существенно сократить длины кинематических цепей путем подбора звеньев и сочетания механизмов, преобразующих вращательное движение в поступательное, а также их взаимного относительного расположения.Предлагаемый манипулятор, несмотря на кажущуюся неустойчивость, легко превращается в устойчивый, если, как указано выше, снабдить его выносной опорой портала (не показана), образующей поступательную кинематическую пару со станиной,Формула изобретения Манипулятор модульного типа, содержащий основание, захват и модули перемещений, каждый из которых включает корпус и выходное звено с приводом его перемещения, причем корпус жестко связан с выходным звеном предыдущего модуля, о т л и ч а ю щ и й с я тем, что, с целью расширениятехнологических возможностей за счет увеличения зоны обслуживания, корпус каждого модуля перемещения снабжен направляющей, а привод перемещения вы ходного звена каждого модуля выполнен ваиде двигателя, смонтированного на корпусе, а также гибкой передачи и двух зубчаореечных передач, зубчатые рейки которых смонтированы соответственно на корпусе и 15 на выходном звене модуля, причем это звено установлено на направляющей корпуса этого же модуля, а зубчатые колеса передач сблокированы на одном валу, жестко связанном с гибким элементом гибкой переда чи, опорные элементы которой размещенысоответственно на выходном валудвигателя и на корпусе этого модуля.1775289 Составитель И,ПетриковецТехред М,Моргентал Корректор С,Патрушева Редактор Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 3 аказ 4013 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открьпиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., 4/5
СмотретьЗаявка
4844269, 04.04.1990
БЕЛОРУССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ФИЛОНОВ ИГОРЬ ПАВЛОВИЧ, ПЕТРИКОВЕЦ ИГОРЬ ПЕТРОВИЧ
МПК / Метки
МПК: B25J 9/08
Метки: манипулятор, модульного, типа
Опубликовано: 15.11.1992
Код ссылки
<a href="https://patents.su/6-1775289-manipulyator-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор модульного типа</a>
Динамометрический башмак для подъемников с жесткими направляющими

Номер патента: 312816
Опубликовано: 01.01.1971
Авторы: Алифанов, Иоффе, Мирский, Тюрин
МПК: B66B 13/14
Метки: башмак, динамометрический, жесткими, направляющими, подъемников
...например, с двумя симметрично расположенными относительно центра 20 ее поперечными пазами, образующими утоньшения, выполняющие функции плоских упругих шарниров.Утоньшения обеспечивают податливостьконцов пластины, контактирующих с силоиз мерительньпи элементами. В этом случаецентральная часть пластины между утоньшениями жестко крепится к вкладышу.Силоизмерительный элемент выполнен в виде стержня со сферическими торцави, на ко тором наклеены вдоль оси тензодатчики 8, Силоизмер:тельный элемент установлен перпен 312816дикулярно к гибкой пластине и шарнирно закреплен одним концом к ней, а другим концом - к вкладышу башмака.Тензодатчики каждых двух силоизмерительных элементов, контактирующих с одной гибкой пластиной б, включаются в...
Захватный орган лесозаготовительной машины

Номер патента: 488550
Опубликовано: 25.10.1975
Авторы: Божак, Вахнеев, Цветков, Цетлин
МПК: A01G 23/08
Метки: захватный, лесозаготовительной, орган
...для подсчета объема. Это достигается тем, что на одной из осей шарнирного соединения гидроцилиндра поворота челюсти установлен полый корпус с набором жестко укрепленных в нем и электрически изолированных неподвижных контактных дорожек со скользящими по .ч.м подвижными контактами, закрепленными на подвижном держателе, шарнирно установленном на второй оси шарнирного соединения гндроцилиндра поворота ел:ости. Центральный чаучно-исследова гельский и проектно-конструкторский(71) Заявитель институт механизации и энергетики лесной промышленностич488550 дактор Д, Пинчук Составитель В. АндроновТехред А, Демьянова Коррект,эр Н. Бабурка 9,комитета Советаретений и открыт35,: Раушская, наб Тираж 61 Государственного по делам изо 113035, Москва, Ж...
Устройство для крепления уплотнительной полосы на борту кожуха ленточного конвейера

Номер патента: 742285
Опубликовано: 25.06.1980
Авторы: Долин, Сокольский
МПК: B65G 21/20
Метки: борту, кожуха, конвейера, крепления, ленточного, полосы, уплотнительной
...виде разрезной втулки, зафиксированной на направляющей с помошью резьбового соединения.На фиг. 1 изображено устройство для крепления уплотнительной полосы на борту кожуха ленточного конвейера, вид сбоку; на фиг.2 в . разрез А - А на фиг. 1; на фиг, 3 - разрез Б - Б на фиг. 1; на фиг. 4 - разрез В - В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг.1.Над конвейерной лентой 1 установлен кожух 2, Зазор между лентой и кожухом закрыт уплотнительной полосой 3. К борту кожуха 2 жестко прикреплены направляющие 4, на которых установлены замки 5, представляющие разрезную втулку с удлиненной консолью, в отверстие которой вставлен винт, один конец которого ввинчен в противоположную часть втулки, а другой конец винта имеет ру. коятку, Замок 5 с помощью...
Буровая установка

Номер патента: 1303711
Опубликовано: 15.04.1987
Автор: Монаков
МПК: E21B 1/00, E21B 19/08
Метки: буровая
...буровой инструмент 10. На направляющей 3 установлен также упор с заглушками 11. В торце корпуса траверсы 2 выполнены отверстия 12, через которые упор с заглушками 11 имеет возможность взаимодействовать с траверсой 2, в корпусе которой выполнены отверстия 13, которые через клапан 14 соединяют внутреннюю полость траверсы 2 с атмосферой. Внутри направляющей 3 установлен поршень 15, перемещение которого внутри направляющей 3 ограничено ограничителями 16 и 17, расстояние между которыми соответствует длине корпуса траверсы 2. При этом в ограницителе 17 выполнено отверстие 18.Буровая установка работает следующим образом.В момент забуривания траверса 2 фиксируется на направляющей 3, а буровой 40 инструмент 10 и упор 7 упираются в...
Манипулятор для очистки днищевой части корпуса судна

Номер патента: 1743987
Опубликовано: 30.06.1992
МПК: B63B 59/06
Метки: днищевой, корпуса, манипулятор, судна, части
...2 снабжены шарнирными тягами(связями) 7.Стрела 2 поджимается к обрабатываемой поверхности гидроплунжерами 8.Рабочий орган 5, закрепленный на оси4, содержит корпус 9 с закрепленными нанем гидродвигателями 10 и 11. шарнирнымицепями 12 и 13 связанными с очистным барабаном 14. На дисках 15 и 16 барабана 14жестко закреплены валки (оси) 17 со свободно насаженными на них шарошечными.звездочками 18 с зазором 19,В состав гидросистемы манипуляторавходят гидродвигатели 20, 21 привода вращения очистного барабана. рулевая баранка 22 и рулевой гидроцилиндр, сообщенныесо сливом, вентиль 25 сброса давления, посредством которого гидродвигатели 20, 21сообщены со сливом, гидроклапан 25 степени прижатия рабочего органа, выполненныйв виде...
Предыдущий патент: Манипулятор для гпс механообработки
Следующий патент: Захватное устройство
Случайный патент: Устройство для измерения расстояния, пройденного автомобилем