Измерительное устройство к балансировочному станку
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИРЕСПУБЛИК 142041 4 601 М 12 ПИСАНИЕ ИЗОБРЕТЕА ВТОРСКОМУ СВИДЕТЕЛЬСТВУ вод- реГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТ(71) Минское станкостроительное проственное объединение им, Октябрьскволюции(57) Изобретение относится к балансировочной технике. Цель изобретения -- повышение производительности за счет оптимального выбора осей коррекции, что приводит к увеличению количества годных для коррекции роторов. Регистратор 28 значения дисбаланса, соединенный с выходом схемы 1 фильтрации, оценивает необходимость коррекции. Регистраторы 32 и ЗЗ составляюгцих дисбаланса определяют величины масс, устанавливаемых по осям коррекции. Контроль нахождения осей коррекции напротив корректирующей позиции определяется регистраторами 26 и 27 фазы. 5 ил.5 10 Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках, станках-автоматах и автоматических линиях при балансировке роторов с симметрично расположенными относительно центра вращения местами, разрешенными для коррекции.Цель изобретения - повышение производительности за счет оптимального выбора осей коррекции, что приводит к увеличению количества годных для коррекции роторов. На фиг. 1 представлена структурная схема измерительного устройства к балансировочному станку; на фиг. 2, 3 - векторные диаграммы; где Рмк. обозначено максимальное значение составляющей дисбаланса; Р -- вектор. начального дисбаланса; Ол и Ов - составляющие дисбаланса; Хл и Хв - оси измерительной косоугольной системы координат; 118 - номера осей коррекции; сс -- центральный угол между осями Хл и Хв измерительной косоугольной системы координат; Д - центральный угол между ближайшими осями коррекции; на фиг. 4 - временные диаграммы, числа, стоящие у начала каждой из осей ординат, указывают номер элемента структурной схемы на фиг. 1, осям векторной диаграммы на фиг. 3 соответствуют положительные перепады импульсов на временных диаграммах фиг. 4 (при вращеНии плоскости, в которой расположена векторная диаграмма против часовой стрелки с круговой частотой а).Измерительное устройство к балансировочному станку содержит схему 1 фильтрации, соединенные соответственно с ее первым и вторым входами вибродатчик 2 и датчик 3 фазы, генератор 4 несущей частоты, первый выход которого соединен с первым входом датчика 3 фазы и третьим входом схемыфильтрации, а второй - с вторым входом датчика 3 фазы и четвертым входом схемы 1 фильтрации, схему 5 привязки, формирователь 6 сигнала осей коррекции, црвый и второй входы которого соединены соогветственно с первым и третьим выходами генератора 4 несущей частоты, первый и второй элементы 7 и 8 синхронной задержки, первые входы которых соединены с выходом формирователя 6 сигнала осей коррекции и первым входом схемы 5 привязки, выход которой соединен со вторым входом первого элемента 7 синхронной задержкц, и схему 9 измерения параметров дисбаланса, первый, второй, третий, четвертый и пятый входы которой соединены соответственно с выходом схемы 1 фильтрации сигнала дисбаланса и вторым входом схемы 5 привязки, выходом дагчика 3 фазы, третьим выходод генератора 4 несуьцей частоты и выходами соответственно первого и второго элементови 8 синхронной за 15 20 25 30 35 40 45 50 55 держки, а выход - со вторым входом второго элемента 8 синхронной задержки.Формирователь 6 сигнала осей коррекции выполнен в виде программатора 1 О, последовательно соединенных одновибратора 11, вход которого представляет собой первый вход формирователя 6 сигнала осей коррекции, укорачиваюшей цепочки 12 и соединенного К-входом счетчика 13, Яп-вход которого соединен с программатором 10, а С-вход и выход представляют собой соответственно второй вход и выход формирователя 6 сигнала осей коррекции. Схема 5 привязки выполнена в виде формирователя 14 и соединенного с ним Р-входом триггера 15, вход формирователя 14, С-вход и выход триггера 15 представляет собой соответственно второй и первый входы и выход схемы 5 привязки.Схема 9 измерения параметров дисбаланса вьпопнена в виде первого и второго счетчиков 16 и 17 первого и второго счетчиков 18 и 19 Джонсона, С-входы которых соединены соответственно с выходами первого и второго счетчиков 16 и 17, последовательно соединенных укорачивающей цепочки 20 и логического элемента 21, 2 И, выход которого соединен с К-входами счетчиков 6 и 17 и счетчиков Джонсона 18 и9, последовательно соединенных первого логического элемента 22 2 И - НЕ, первый вход которого соединен с первым выходом первого счетчика Джонсона 18, синхронного одновибратора 23 и второго логического элемента 24 2 И - НЕ, второй вход которого соединен с выходом первого логического элемента 22 2 И - НЕ, а выход - с СЕ-входом второго счетчика 17, блока 25 управления, соединенного со вторым входом логического элемента 21 2 И и 8 Т-входом синхронного одновибратора 23, двух регистраторов фазы 26 и 27, подключенных первыми входами к первым выходам соответствующих счетчиков Джонсона 18 и 19, регистратора 28 значения дисбаланса, аттенюатора 29, двух фазовых детекторов 30 и 31, первые входы которых соединены с выходом аттенюатора 29, а вторые входы - соответственно с вторыми выходами второго и первого счетчиков 18 и 19 Джонсона и соединенных с выходами фазовых детекторов 30 и 31 двух регистраторов 32 и ЗЗ составляющих дисбаланса, соединенные между собой входы регистратора 28 значения дисбаланса и аттенюатора 29 представляют сооой первый вход схемы 9 измерения параметров дисбаланса, соединенные между собой вторые входы регистраторов 26 и 27 фазы - второй вход, соединенные между собой С-входы счетчиков 16 и 17 - третий вход, вход укорачивающей цепочки 20 - четвертый вход, второй вход первого логического элемента 22 2 И - НЕ - пятый вход, а первый выход первого счетчика Джонсон -51 О 30 35 40 45 50 55 Схема 5 привязки предназначена для определения ближайшей, следующей во времени за вектором дисбаланса О оси, разрешенной для коррекции (см. ось 5 на фиг. 3) и формирования соответствующих этой оси положительных перепадов выходного сигнала (см. временную диаграмму 5 на фиг. 5).Для этого на С-вход триггера5 поступают импульсы, соответствующие осям коррекции, а на О-вход - импульсы, положительные перепады которых соответствуют вектору дисбаланса О. Эти импульсы вырабатывает входящий в состав схемы 5 привязки формирователь 14. Элемент 7 синхронной задержки должен обеспечить сдвиг выходного сигнала схемы привязки на угол3, где М - . В этом1случае формируемйе в схеме 9 йзмерения параметров дисбаланса оси ХА, Хв измерительной системы координат будут расположены симметрично относительно сектора, образованного ближайшими к вектору дисбаланса О осями, разрешенными для коррекции. Для указанного сдвига на тактовый вход элемента 7 синхронной задержки по даются импульсы, соответствуюшие осям коррекции, угол между которыми равен р. Положительные перепады выходных импульсов элемента 7 синхронной задержки преобразуются укорачивающей цепочкой 20 в короткие импульсы, обеспечивающие синхронизацию по К-входам счетчиков 16 и 17 и счетчиков 18 и 19 Джонсона. Результирующий модуль пересчета счетчика6(17) и счетчика8 (19) Джонсона выбирается равным отношению частот тактирующих импульсов на С-входе счетчика 16(17) и синхронизирующих импульсов несущей час готы на й-входах. Поэтому на каждом из четырех выходов счетчика 18(19) Джонсона выделяются импульсы несущей частоты типа меандр с взаимным сдвигом фаз 90. Таким образом до поступления комайды с блока 25 управления на первом выходе счетчика 18 Джонсона формируются импульсы, положительные перепады которых соответствуют оси Хх. Этот сигнал поступает на вторые входы элемента 8 синхронной задерж ки и логического элемента 22 2 И - НЕ. Элемент 8 синхронной задержки обеспечивает задержку сигнала Хл на угол сс = Мр. Для этого на его тактовый вход поступают выходные импузьсы формирователя 6 осей коррекции с интервалом между ними, соответствующим углу р, а задержка выбирается равной М тактов. Гри этом на выходе логического элемента 22 2 И - НЕ формируются импульсы частоты со, длительность нулевого уровня которых соответствует углу и:== Х ( см. временную диа гра мму 9(иг 5) После переключения схемы 1 фильтрации сигнала дисбаланса в режим хранения (по цепи, не указанной на фиг. 1) блок 25 управления вырабатывает в виде О команду, которая поступает на второй вход логического элемента 21 2 И и ЯТ-вход синхронного одновибратора 23. При этом логический элемент 21 2 И блокирует прохождение импульсов синхронизации на К-входы счетчиков 16, 17 и счетчиков Джонсона 18 и 19, что переводит их в режим динамического хранения фазы. Одновременно синхронный одновибратор 23 генерирует одиночный импульс, длительность которого определяется периодом повторения отрицательных перепадов сигнала, поступающего на его С-вход и на второй вход логического элемента 24 2 И - НЕ, т.е. периодом несущей частоты. При этом на выходе логического элемента 24 2 И - НЕ выделяется одиночный импульс нулевого уровня, блокирующий по СЕ-входу (входу разрешения счета) счетчик 17 на интервал времени, который соответствует углу 2 л - м. В результате фаза импульс на первом выходе счетчика Джонсона 19 сдвигается по отношению к сигналу Хх на угол 2 ла и соответствует оси ХВ.Таким образом, после выдачи команды блоком 25 управления периода несущей частоты на выходах счетчиков Джонсона 18 и 19 устанавливаются сигналы, соответствующие осям Хх и Хв. Сигналы Хи Х. используются для отыскания составляющих Ох и Ов на роторе с помощью регистраторов 26 и 27 фазы. Сигналы Хх(270) и Хв (90) используются в качестве опорных для измерения значения составляющих Ох и ОвБалансировка роторов с использованием устройства осуществляется в следующей последовательности.Включают вращение через интервал времени, достаточный для установления переходных процессов в схеме 1 фильтрации сигнала дисбаланса, устрейство переключается в режим хранения информации и вращение балансируемого ротора выключается. После этого регистратор 28 значения дисбаланса используется для оценки необходимости корректировки дисбаланса (путем сравнения значения дисбаланса с допустимой для данного ротора величиной), а регистраторы 32 и 33 составляющих дисбаланса - для определения величины корректирующей массы, которую нужно устранить или внести (в зависимости от выбранного метода коррекции) по каждой из двух осей Хх и Хв. Вращая ротор (вручную или автоматически),контролируют момент нахождения осей Хх или Хв напротив корректирующей позиции или указателя с помощью регистраторов 26 и 27 фазы.Измерительное устройство к балансировочному станку обеспечивает измерение ос 420418выход схемы 9 измерения параметров лисбаланса,Первый и второй элементы 7 и 8 синхронной задержки могут быть выполнены, например, в виде сдвиговых регистров.Устройство работает следующим образом.Измерение составляющих дисбаланса в косоугольной системе координат основано на фазовом детестровании предварительно отфильтрованного и перенесенного на несущую частоту с) сигнала дисбаланса.Фильтрация сигнала дисбаланса, выделяющегося на выходе вибродатчика 2 при вращении балансируемого ротора (на фиг. 1 не показан) с частотой 1), осуществляется хемойфильтрации. Опорный сигнал поступает на второй вход схемыфильтрации с датчика 3 фазы, ротор которого кинемзтически связан с балансируемым ротором. Используемый в качестве датчика 3 фазы вращающийся трансформатор или сельсин ра ботает в режиме фазоврацателя, лля чго на его Входы поступают многофззпые (двухфазные -- если используется врзпсзющийся трансформатор и трехфазныеесли сельсин) сигналы, вырабатываемые генератором 4 несущей частоты, последний также питает ортогонаьными сигналами несущей частоты схемуфильтрации, на выходе которой выделяегся гармонический сигнал частоты сс), ахп,ус. и фззз которого несут информацию о зна:енину.ле вектора дисбаланса. Регистратор 28 значения лисбалзнса осуществляет индикацию значения дисбаланса или (и) преобразование значения дисбаланса в дискретную форму при автоматизации процесса балансировки.Для измерения составляющих Р и Рв (расположенных на осях Х и Хв), преобразованный на несущую частоту с сигнал лисбаланса через аттеноатор 29, учитывающий коэффициент - ,-, поступает на информационные вхоль фазовых детекторов 30 и 3. На вторые входы фазовых детекторов 30 и 31 постуГают опорные сигналы, соответствующие осям Х (270) и Хв (90). Эти сигналы формируются счетчиками Джонсона 8 и 19. Постоянные напряжения, пропорциональные значениям составляющих дисбаланса Р и Рв, с Выходов фазовых детекторов 3031 оступьк т на регистраторы 32 и 33 составляющих дисбаланса для индикации или лля преобразования в дискретную форму при автоматизации процесса балансировки.Отыскание составляощих Р и Рв ня балансируемом роторе осуществляется путем сравнения фаз сигнала углового положения ротора, формируемого датчиком 3 фазы и сигналов, соответствуюпсих осям Х и Хв измерительной косоугольной системы коорлиНат, На СОГОРЬХ РаСПОЛКЕНЫ СОТЗВГЯЮ 1 О 15 20 25 30 35 40 45 50 55 4щие дисбаланса Р и Рв. Дл 5 этого сигнал уг:с вого положен и ротора, прлствяюший собой синусоиду несущей частоты с), поступает с датчика 3 фазы нз (втгрые) входы регистраторов 26 и 27 фазы. На их первые входы подаются прямоугольные импульсы несусцей частоты с, фаза положительных ерепалов ко Горы х соответстзует осям Х и Хв. В результате поиск составляющих Р и Рнз р торе прои водится путем повор 01 з багзсруемого ротора (жестко связанного с ротсром датчика 3 фазы) ло совпадения фаз сигналов на Входах регистраторов 26 и 27 (поочередно).(1 ри эО) исксЯ 55 состяВГЯкцаЯ ( Рили Р) Оу, т находитьЯ син) ИВ закрси- ГННОГО НЕП Лвнжио 3 С аИНХ КаЗТЕЛЯ или сверлил: нойОлсвси.ВозможнОть хс,.Овки кязятс)5 и;исвсп)и;ьнОЙ О.Овки В )роизво.ьнОх мет.хо)кет быть Оон нз, зпрпмер, Вк.ноением нз выходе схемыфильтряпи сиг.нала лисбалансз, рс гулируемого фззоврапателя.Рассмотрим процсс формирования с игналов, соответствуюпсих осям нз бялзнсируемом роторе, необходимым лля измерения значений составляющих Р и 0 и отыскания их на роторе.Формирователь 6 сигналя осей коррекциивырабатывает сигни являк)шийся электрическим аналогом осей коррекции на роторе.Этот сигнал представляет собой прямоугольные импульсы типа меандр, число которых в периоде несупей частоты равно числу осей коррекции, а фазы их положительных перепадов относительно сигнала, питак)пего первый вход датчика 3 фазы, соответствует угловому положению сисгемы осей К нз бялансируемом роторе Формирование сигнала с частотой К, (где К =- число осей360коррекции на роторе) осуцествляется, например, счетчиком 13, модуль счета п которого задается по 8-входу (входу предварительной устзновки счетчика в состояние, соответствующее числу и) программатором 10. П ри соотно шс и ни ч стот на втором и третьем выходах генератора 3 несущей частоты равном, например 360, значение численно равно углуВыраженному в градусахНа фиг. 2 и 3 привелен пример лля угла Р = 20.Фаза ВыОлных импх,ьсов етикз 3определяется фазой хсг; Ов нз егос-Вхс- ле, которые фортирус)т 5 укора гивак) щей цепочкой 12 по спалу импу,.Сов. Вырабатываемых одновибрзтором 11. Изменение л,ите,)ьности и.спульсов цлнсВр го); 11 т,- кит Образом позвс)Г 5 сГ хх 50.ь с 1)сз СИГ- на.з чзтоты Ксс, 00)с ТзУ 0 пи Уг,ОНО.Х ОГ 0 СС И К) С, П)СС 0,Н Х 5 КО рекпии на бзгзнсирххо ро-Оптавляюших дисбаланса в косоугольной системе координат с центральным углом между ее осями, кратным центральному углу между осями коррекции. Г 1 ри этом ориентация измерительной системы координат осуществляется всегда таким образом, что ее оси распо агаются симметрично относительно сектора, образованного осями коррекции, ближайшими к вектору дисбаланса. Это свойство устройства позволяет повысить значение максимального начального дисбаланса ротора, который может быть скорректирован и соответственно повысить выход годных деталей.Фор чула изобретенияИзмерительное устройство к балансировочному станку, содержащее схему фильтрации, соединенные соответственно с ее первым и вторым входами вибродатчик и датчик фазы, генератор несущей цастоты, первый вход которого соединен с первым входом датчика фазы и третьим входом схемы фильтрации, а второй - с вторым входом датчика фазы и четвертым входом схемы фильтрации, схему привязки, формирователь сигнала осей коррекции, первый и второй воды которого соединены соответственно с первым и третьим выходами генератора несугцей цастоты, а выход - с первым вхо.дом схемы привязки, и схему измерения параметров дисбаланса, первый выход которой соединен с выходом схемы фильтрации и вторым входом схемы привязки, второй - с выходом датцика фазы, а третнй с третьим выходом генератора несущей частоты, отличающееся тем, что, с целью по вышения производительности оно снаоженопервым и вторым элементами синхроннй задержки, первые воды которых соединены с выходом формирователя сигнала осей коррекции, вторые -- соответственно с выходами схемы привязки и схемы измерения 20 параметров дисбаланса, а выходы соответ.ственно с четвертым и пятым входами схемы измерения параметров дисбаланса.420418 20 и 18 вцова Редактор Л. ДолиничЗаказ 4320/45ВНИИПИ Государств13035,Производственно.по Составитель Ю. КругловТехред И. Верес КТираж 847 Пенного комитета СССР по делам изоМосква, Ж - 35, Раушская наб.,играфическое предприятие, г. Ужгор рректор О. Крадписноеретений и открытий4/5д, ул. Проектная, 4
СмотретьЗаявка
4181459, 14.01.1987
МИНСКОЕ СТАНКОСТРОИТЕЛЬНОЕ ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ИМ. ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ
МАЛЫГИН ВИКТОР АЛЕКСАНДРОВИЧ, ПОЛИТАЕВ НИКОЛАЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G01M 1/22
Метки: балансировочному, измерительное, станку
Опубликовано: 30.08.1988
Код ссылки
<a href="https://patents.su/6-1420418-izmeritelnoe-ustrojjstvo-k-balansirovochnomu-stanku.html" target="_blank" rel="follow" title="База патентов СССР">Измерительное устройство к балансировочному станку</a>
Схема генерирования сигнала псевдоошибки
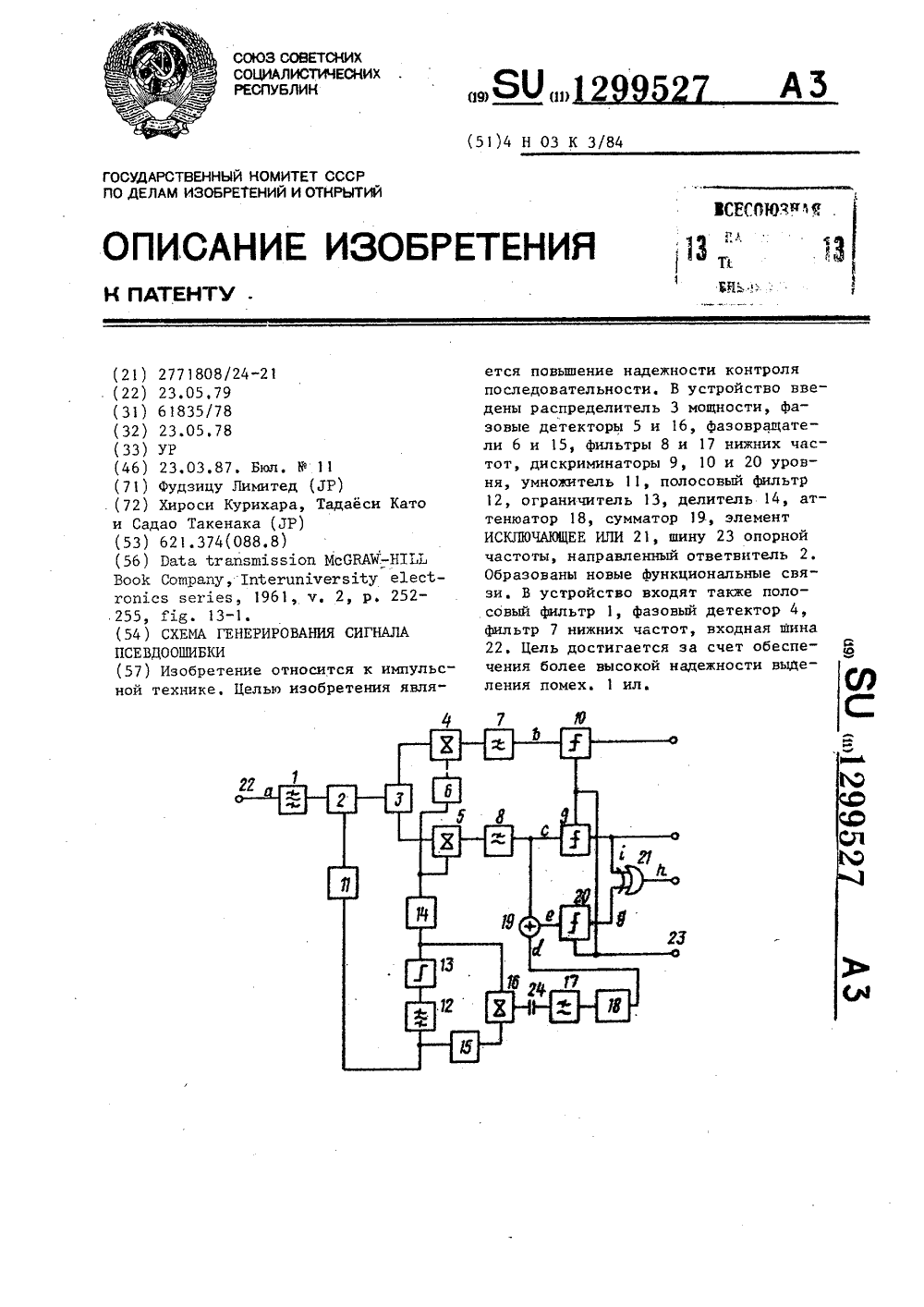
Номер патента: 1299527
Опубликовано: 23.03.1987
Авторы: Садао, Тадаеси, Хироси
МПК: H03K 3/84
Метки: генерирования, псевдоошибки, сигнала, схема
...в делитель 14, где его частота делится на четыре. В результате этого на выходе делителя 14 формируется сигнал с моноспектром, который в качестве опорного сигнала подается на первый 4 и второй 5 фазовые детекторы,При генерировании сигнала псевдо- ошибки в устройстве используются составляющая помехи, выделяемая из выходного сигнала умножителя 11, и демодулированный входной сигнал, Часть сигнала с манипуляцией сдвигом фазы с направленного ответвителя 2 умножается в умножителе 11 и получается несущая волна с составляющей, пропор12995 циональной составляющей помехи входного сигнала. Фазы каждого векторавходного сигнала с манипуляцией сдвищего сигнала имеет составляющую поме 10 15 го 40 50 55 гом фазы расположены с разностью фазо90 , а умножая...
Система оптимизации режимов работы объекта
Номер патента: 1636831
Опубликовано: 23.03.1991
Авторы: Калиногорский, Коршиков, Котухов, Мельник, Туманов, Чурилов, Шерышев
МПК: G05B 13/00
Метки: объекта, оптимизации, работы, режимов
...83, итретьих источников 84 постоянного напряжения, итретьих групп 85 ключей. Вход 86 анализатора 5 входного сигнала объекта соединен с первыми входами первых пороговых элементов 83, вторые входы которых связаны с выходами третьих ис источников 84 постоянного напряжения, настроенных так, что на второй вход первого порогового элемента 83 подан сигнал "1", на второй пороговый элемент 83 - "2", и т.д. на последний первый пороговый элемент 83 подан сигнал величиной и.1636831Выходы первых пороговых элементов той 106 и пятый 107 нормально разомк соединены с управляющими входами нутые ключи, седьмой сумматор 108. Интретьих групп 85 ключей (фиг.16). формационный вход шестого ключа 106 Вход 87 анализатора 5 входного сиг- связан с входом 109, а...
Многостабильное пересчетное устройство

Номер патента: 480196
Опубликовано: 05.08.1975
Авторы: Алексеев, Горячев, Мансуров
МПК: H03K 29/00
Метки: многостабильное, пересчетное
...счете,25 Устройство работает следующим образом.В исходном состоянии, т.е. при отсутствии счетного импульса отрицательный (нулевой) полярности (Тсч = 1), оба триггера 1 и 2 находятся в одинаковом состоянии, поскольку ЗО разрешена прямая перепись информации изтриггера 2 в триггер 1. Так, например, если5 1 О триггер 2 находится в состоянии 011 (первое состояние), открыта левая схема И элемента 9 (так как Яг=Яз=Т=1), т.е. триггер 1 также находится в первом состоянии Я=О, Я 2 - ЯЗ 1)Допустим, что схема работает в режиме слежения (прямой счет) и, следовательно, на шине слежения 10 присутствует разрешающий уровень 1, а на шине вычитания 11 - уровень 0, В этом случае на выходах элементов 3 - 5 имеются уровни 0, так как открыты левые и правые...
Устройство для передачи четырехпозиционного частотноманипулированного сигнала с непрерывной фазой

Номер патента: 660296
Опубликовано: 30.04.1979
Авторы: Беляев, Крохин, Муравьев
МПК: H04L 27/10
Метки: непрерывной, передачи, сигнала, фазой, частотноманипулированного, четырехпозиционного
...27 нижних частот, смесителя 28, фильтра 29 нижних частот и смесителя 30, основной фильтр 31 нижних частот, два дополнительных ключа 32, 33 , утроитель 34 частоты и дополнительный триггер 35.Устройство работает следующимобразом.Сигнал передаваемой информации,представленный в бинарном двухразрядном параллельном коде, синхронизируется с помощью двух триггеров7 и 35, Устройство работает такимобразом, что выходная частота управляемого генератора 5 в зависимостиот сигналов на выходах обоих триггеров 7 и 35 равно Г + В/4 илиГ + ЗВ/4, где Го - частота генератора 1; К - символьная частота, равная частоте генератора б. На выходеосновного фильтра 31 при этом присутствует сигнал с частотой В/2 илиЗВ/2, Полоса пропускания основногофильтра 31...
Устройство для измерения отношения сигнала к флуктуационной помехе

Номер патента: 924917
Опубликовано: 30.04.1982
МПК: H04N 7/02
Метки: отношения, помехе, сигнала, флуктуационной
...) и навлияния изменения постоянной составляю- пряжения с выхода амплитудного детекшей ТВ сигнала на результаты измерения. 50 тора 5, пропорционального эффективномуДалее ТВ сигнал поступает на блок 3 напряжению флуктуационной помехи(Ос)стробирования. В случае передачи черно- Эти коды последоватепьно подаются набепого ТВ сигнала ТВ стробирование сиг- вычислитель 8, который производит вынала осуществляется импульсами малой числение измеряемой величины Ч неподлительности, следующими с частотой по средственно в децибапах: М = 202 слей в любой точке активной части вы- ,о,.бранной строки, Учитывая, что ТВ сиг- В случае подачи на вход измерителянал обладает большим коэффициентом кор- полного цветового ТВ сигнала его требо9249.1 7 При подаче...
Предыдущий патент: Устройство для измерения статических моментов лопаток турбомашин
Следующий патент: Измерительное устройство к балансировочному станку
Случайный патент: Способ смазки при горячей прокатке