Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1126926
Автор: Орещенко
Текст
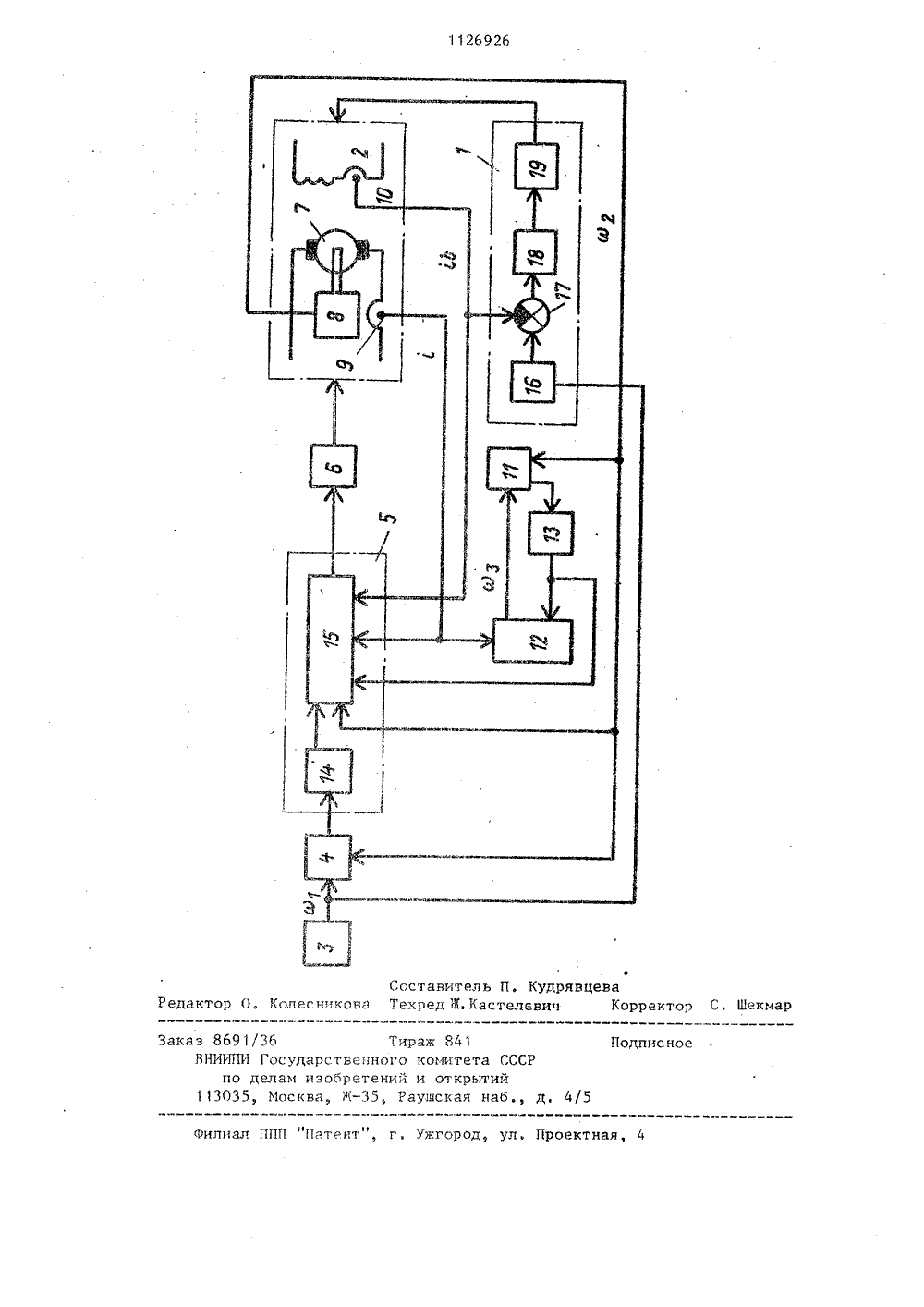
112692 СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИН 5 В 13/02 ОПИСАНИЕ ИЗОБРЕТЕНИЯ И АВТОР ТВУ ый р, регулятор,злектродвигателнем датчиками силительь с устанокорости,ыход котоости ленн токароговоз бужд то возбуждения, н с вторым в дом блока скорости е вых чи ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИ(71) Новокузнецкое отделение Ордена Трудового Красного Знамени Всесоюзного научно-исследовательского проектногоинститута "Тяжпромэлектропроект" им. Ф.В,Якубовского(56) 1. Мысливец Н.Л., Сабинин Ю.А, Самонастраивающийся электропривод промышленного робота, построенный на базе системы подчиненного регу" лирования, -"Электротехническая промьппленность". Серия Электропривод.1977, Кф 8(61), с.23-25.2. Авторское свидетельство СССР 9845143, кл. Я 05 В 13/02, 1981 (прототип).(54)(57) САМОНАСТРАИВАКХЧАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая блок возбуждения, выход которого соединен с входом обмотки возбуждения двигателя, последовательно соединенные задатчик, персоединен с вторым входом первого сумматора и первым входом второго сумматора, второй вход которого соединенс вьгходом интегратора, а первый входблока возбуждения соединен с вьгходомзадатчика, о т л и ч а ю щ и й с ятем, что, с целью повышения надежности и точности работы системы, в нейустановлен корректирующий усилитель,вход которого соединен с выходомвторого сумматора, выходы датчиковскорости и тока возбуждения соединеньсоответственно с вторым и третьимвходами регулятора, четвертый входкоторого соединен с вьмодом датчикатока двигателя и первым входом интегратора, второй вход которого соединенс выходом корректирующего усилителяи пятым входом регулятора, 112 б 926Недостатком известной системы является низкая точность определения приведенного момента инерции при переменном моменте нагрузки и потоке возбуждения двигателя.Наиболее близкой к данной является самонастраивающаяся система упР равления, в которой дополнительно установлены последовательно соединенные третий интегратор, пятый сумматор и блок деления, второй вход которого соединен с выходом 50 Изобретение относится к областисистем регулирования скорости и может быть использовано для управленияпромьпппенными электроприводами,в которых в процессе работы имеет 5место изменение момента нагрузкии электромеханической постояннойвремени за счет вариаций потокавозбуждения двигателя и приведенногомомента инерции. 10Предлагаемая система может исполь, зоваться, например, в роботостроении (в системах управления привода"ми рабочих органов манипуляционныхроботов), в станкостроении (в системах управления приводами главногодвижения металлорежущих станков),в металлургии (в системах управления приводами моталок, приводамивалков прокатных клетей и других 20механизмов, где требуется управление скоростью независимо от вариаций момента нагрузки и электромеханической постоянной времени).Известна самонастраивающаяся 25система управления, содержащая последовательно соединенные задатчик,первый сумматор, регулятор, усилитель мощности и электродвигательс установленными на нем датчиками З 0скорости и тока, выход которого через последовательно соединенныевторой сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор, второйблок умножения и второй интеграторподключен к управляющему входурегулятора и второму входу первогоблока умножения, первый вход которого подключен к второму входу второ го блока умножения, выход датчикаскорости соединен с вторым входомпервого сумматора и вторым входомчетвертого сумматора, выход которого соединен с вторым входом третьего сумматора 11. второго интегратора, а выход -с вторым входом второго сумматора,выход первого блока умножения .подключен к входу третьего интегратора,выход датчика скорости подключен квторому входу пятого сумматора 23.Система является более сложнбй(следовательно, менее надежной) ипозволяет в процессе определениятекущего значения электромеханической постоянной времени привода находить текущее значение статическойсоставляющей така двигателя, Поскольку процессы определения электромеханической постоянной времени привода и статической составляющей токадвигателя являются взаимосвязаннымии имеют одинаковую длительность,вычисление электромеханической постоянной времени привода всегда осуществляется при приближенных значениях статической составляющейтока двигателя и обуславливаетпогрешность при определении электромеханической постоянной времени,Точность настройки регулятора в рядеслучаев является недостаточной. Кроме того, обе известные системы необеспечивают самонастройку выходнойкоординаты от вариаций момента нагрузки двигателя,Цель изобретения - повышение надежности и точности работы системы.Поставленная цель достигается тем,что в самонастраивающуюся систему управления, содержащую блок возбуждения, выход которого соединен с входом ббмотки возбуждения двигателя,последовательно соединенные задатчик,первый сумматор, регулятор, усилительмощности и электродвигатель с установленными на нем датчиками скорости,тока и тока возбуждения, выход которого соединен с вторым входом блокавозбуждения, выход датчика скоростисоединен с вторым входом первого "сумматора и первым входом второгосумматора, второй вход которого соединен с выходом интегратора, а первыйвход блока возбуждения соединен с выходом задатчика, введен корректирующий усилитель, вход которого соединенс выходом второго сумматора, выходыдатчиков скорости и тока возбуждениясоединены соответственно с вторыми третьим входами регулятора, четвертый вход которого соединен с выходомдатчика тока двигателя и первым вхо 1126926димости реализация пропорционально- интегрального звена).Корректирующий усилитель 13 обеспечивает усиление и преобразование выходного сигнала сумматора 11, Закон 5 преобразования корректирующего усилителя 13 определяется требованиями, предъявляемыми к точности определения параметра 3 . В ряде случаев пропорциональный закон корректирующего усилителя 13 является достаточным для удовлетворения указанных требований, При высоких требованиях к точности определения Э в законе преобразования сигнала корректирующим усилите" 15 лем 13 должна присутствовать интегральная составляющая.Интегратор 12 имеет управляемуюпостоянную интегрирования 3 (Ф) и обегэ печивает на своем выходе сигнал 3 Ошз= 3 с 1 1831 (ЙО25Сигнал 1(1 поступает на первый вход интегратора 12, а величина Э (С 1 цзменяется пропорционально сигналу, поступающему на его второй вход с выхода корректирующего усилителя 13. ЗОБлок 1 возбуждения обеспечивает на своем выходе сигнал, формирующий требуемый поток возбуждения (ток возбуждения) двигателя, и содержит последовательно соединенные Аункцио- З 5 нальный преобразователь 16, третий сумматор 17, второй регулятор 18 и второй усилитель 19 мощности возбуждения, На первый вход блока 1 возбуждения и затем на вход Аункционального преобразователя 16 поступает сигнал задания скорости с выхода задатчика 3, На второй вход блока 1 возбуждения и затем на второй вход сУмматоРа 17 постУпает сигнал гэ 45 с выхода датчика 10 тока возбуждения,Функциональный преобразователь 16 обеспечивает преобразование сигнала задания скорости ю в сигнал 50 задания на ток возбуждения (поток возбуждения) двигателя. При этом изменение сигнала ы, соответствующего диапазону изменения скорости от нуля до номинальной не влияет 55 на выход Функционального преобразователя 16, который остается неизменным и обеспечивает задание номинального потока (тока возбуждения) двигателя.Регулятор 18, реализующий, например, пропорционально-интегральный закон, обеспечивает требуемую динамику регулирования тока возбуждения (потока) двигателя.Система работает следующим образом,Динамический режим в системе наступает в момент изменения момента нагрузки на валу двигателя или момента инерции Э системы или потока возбуждения двигателя, Изменение одной (или нескольких) иэ указанных величии приводит к изменению скорости и двигателя, что приводит к соответствующему изменению выходного сигнала сумматора 11. Послед ний,воздействуя через корректирующий усилитель 13 на второй вход интегратора 12,изменяет значение выхода м/3 до уровня сигнала ы 2 и система возвращается в статическое состояние. При этом синхронно с изменением выходного сигнала корректирующего усилителя 13 и пропорционально ему изменяется коэффициент пере- дачи изменяемой части 15 регулятора 5, стабилизируя выходную координатуВремя изменения значения ы до уровня сигнала ы во много раз меньше времени переходного процесса системы по управляющему воздействию о;,что позволяет за счет быстрой перестройки регулятора 5 поддержи" вать скорость двигателя на заданном уровне, т,е. сохранять практически неизменным си нал на выходе сумматора 4, т.е, сумматор 11, корректирующий усилитель 13 и интегратор 12 следят за изменением со в пределах заданной точности, не допуская за счет перестройки регулятора 5 выхода координаты ы за пределы заданной погрешности.В предлагаемое устройство по сравнению с прототипом включен корректирующий усилитель и исключены из схемы блок деления, два блока умножения, два интегратора и три сумматора, что упрощает устройствосистемы, повышая надежность работы, Кроме того, введение корректирующего усилителя и использование интегратора с управляемой постоянной интегрирования позволяет Аорми 7 1126 ровать сигнал перестройки регулятора без промежуточнык вычислений статической составляющей тока двигателя, что повышает, точность настройки регулятора. При этом более простая схема формирования сигнала перестройки обеспечивает сокращение времени формирования сигнала, что также способствует повышению точности настройки регулятора. 10Дополнительно преллагаемая система управления наряду с самонастройкой от вариаций потока возбуждения и момента инерции системы обеснечивает также самонастройку от вариаций 15 момента выгрузки, что обеспечивает более высокую точность стабилизации выходной координаты системы.Технико-экономический эффект от применения предлагаемой систе мы по сравнению с базовым объектом (прототипом) определяется суммарной стоимостью блока деления, двух блоков умножения, двух интеграторов, трех сумматоров за вычетом 25 стоимости корректирующего усилителя и количеством внедренных (планируе 926мык для внедрения) в производствосистем управления, надежностью.работы базового объекта и предлагаемойсистемы (имеет по сравнению с базовымобъектом более высокую надежностьработы и, следовательно, обеспечиваетза время своей эксплуатации меньшеечисло простоев), которая выражаетсяпроизведением стоимости продукции,выпускаемой технологическим агрегатом за час, и разности часов простоябазового объекта и предлагаемой системы за весь период эксплуатации,точностью работы базового объекта ипредлагаемой системы (зависит оттипа технологического агрегата,который обслуживает системы управления, например использование предла.гаемой системы управления для стабилизации скорости прокатных валковнепрерывного стана позволяет снизитьразнотолщинность проката и осуществлять поставку металла по теоретической массе, т.е. для одной и тойже массы металла на входе станаполучать дополнительный выход продукции),1126926 Составитель П, Кудрявцеволесникона Техред Ж,Кастелевич екмар о ор е то з 8691/36 тираж 81 ВНИИПИ Государственного комитета ГССР по делам изобретений и открытий 113035, Москва, 1(-35 Рауиская наб., дЗак Подписно илиал ППП "Патент", г. Ужгород, ул, Проектная,
СмотретьЗаявка
3549917, 09.02.1983
НОВОКУЗНЕЦКОЕ ОТДЕЛЕНИЕ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВСЕСОЮЗНОГО НАУЧНО-ИССЛЕДОВАТЕЛЬСКОГО ПРОЕКТНОГО ИНСТИТУТА "ТЯЖПРОМЭЛЕКТРОПРОЕКТ" ИМ. Ф. Б. ЯКУБОВСКОГО
ОРЕЩЕНКО РУДОЛЬФ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 30.11.1984
Код ссылки
<a href="https://patents.su/6-1126926-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Следящая система двустороннего действия

Номер патента: 1296404
Опубликовано: 15.03.1987
Авторы: Барац, Белоцерковский, Жуков
МПК: B25J 13/00
Метки: двустороннего, действия, следящая
...момент, постоянная составляющая тока 1, а следовательно, и выходного сигнала регулятора 4 - П (при условии линейности характеристики преобразователя 8) независимо от алгоритма его функционирования и ошибки в установившемся режиме должна быть пропорциональна внешней нагрузке на валу следящего привода 1.Работа исполнительного следящего привода 2 прн: компенсации внешних нагрузок, вызванных перемещаемым гру" зом, аналогична описанной с той лишь разницей, что преобразователь 10 преобразует выходной сигнал Б регулятора 5 в пропорциональный перепад давлений ьР в полостях гидродвигателя 11, который создает пропорциональный перепаду Ь Р момент противодействия нйгрузке на выходном валу исполнительного следящего привода 2.Таким образом, при...
Система управления участком взвешивания слитков в потоке стана горячей прокатки

Номер патента: 1156757
Опубликовано: 23.05.1985
МПК: B21B 37/00, B21B 39/00
Метки: взвешивания, горячей, потоке, прокатки, слитков, стана, участком
...по выходу с приводом роль- ганга весов через датчик тока, выходы датчика импульсов и релейного элемента, вход которого соединен с 55 выходом датчика тока, соединены с входами второго элемента И, выход которого соединен с третьим элементом И, выход которого соединен с входом второго цифрового интегратора, выход которого соединен с вторым входом сумматора, третий вход которого через квадратор соединен с выходом тахогенератора, четвертый входсумматора соединен с источником постоянного сигнала, выход второго элемента И соединен с третьим входом первого элемента И, второй датчик наличия металла соединен с вторым входом третьего элемента Ивыход триггера памяти соединен через четвертый элемент И с входом блока управления приводом весов, выход...
Преобразователь перемещения в код

Номер патента: 693415
Опубликовано: 25.10.1979
Авторы: Крепышев, Росляков, Смуров, Соболевский
МПК: G08C 9/04
Метки: код, перемещения
...1 ьХодоисрго формровятеля ,1 цмиульсов,;Эх(; Г Мс 1 ТОРЯ 15 СОЕДИ И(.И С ВЫ ХО,О М РЕВс 1 НЧ ННОГО сч(1 чикя 8, 3 Выходсо Бхс)дсом ГИСТря 16 Кодя уГЛс 1. Гходь ЭязоепЕ НИЗ яииси суммятора 15 и регисгэз 16 кодя Ля СОСДНЕНЫ СООТ(ЕТСТВЕННО ( БЬХОДЯМИ первого формировятсля 11 имг.;,.ьсов ц цсрГО( ЭГЕ СИ-Я ЗЗДЗРЯСКИ;( ВТОРОГО фоР;110 с с ( а . ьсо.ЬП (.1:-КССР.",СИО 0 .Ю)(УН 010 ТРЯНС(тГР.1;Г оИ. 1, Входиыс обмог(Р которого зя тяП 01 с Ну(10-кос 31 ОНОГО преобр 330- )с.ТСД . 2 с(.13.-ВИПУЭК И( ИаИР 5 ЖЕ БИЧ МИ 1.5 П".ПЬ)И аСОВ(Б 1 И 1. с.ГНЯЛ рЗССОГ- ,3(.ОВЯИЯ С ОДНОЙ ИЗ Б ХОНЫХ ОбМООК СИ;",ОсО-:(ОСНХ СПОГО 0 ЗОООТ:10 ГСЭ РВНС(10)Х 3- 5013 . ЧСРСЗ КОМ 4 УТЯТС РПОДЗСТС 53 Ия фяаииР 1; ас И 4с) - Ргц с. )В, (1П сС,И Г ЕЭ 5 , 0 0 Я1М(СВ1(,. ,....
Устройство для централизованного непрерывного контроля параметров

Номер патента: 773632
Опубликовано: 23.10.1980
Авторы: Бобылев, Волков, Замилатский, Чистяков
МПК: G05B 23/02
Метки: непрерывного, параметров, централизованного
...блока 27 (фиг.2 )сформируется единичный сигнал которыйпереведет триггер 30 в нулевое состояние и вследствие этого сумматор 32сформирует единичный сигнал (фиг,З),Единичный сигнал с выхода сумматора32 поступает на вход элемента И 33и через выход 37 на соответствующийвходанализатора кода 17 и на соот- "ветствующий вход элемента ИЛИ 16, свыхода которого в виде сигнала "Нетнормы" через выход 13 блока 5 поступает на.вход 26 пульта б, отображается на блоке 19 и запускает в работуФормирователь 21. С этого момента устройство переходит в режим последовательно опроса.Сигналы с формирователя 21 черезвыходы 23 пульта б и входы 8 - 8 блоков 5 последовательно поступают на 10входы анализаторов 17, блоков 5 - 5 яи запускают их в работу. При этомсигнал...
Устройство для распознавания протяженных линейных объектов

Номер патента: 826372
Опубликовано: 30.04.1981
МПК: G06K 9/30
Метки: линейных, объектов, протяженных, распознавания
...равное времени прохождения прямоугольной апертурой наибольшей возможной ширины объекта. При одновременном 20 наличии этих двух признаков принимают решение о распознавании именно протяженного линейного объекта.Указанная цель достигается тем) что в известное устройство, содержа щее оптически связанные объектив, блок развертки изображения и многоэлементный Фотоприемник, каждый элемент которого подключен через соответствующие последовательно соединен ные фильтр и амплитудный ограничитель ко входу сумматора, выход которого соединен со входом порогового элемента, введены блоки задержки, блоки вычитания, ключ и дополнительные 35 амплитудные ограничители, сумматор и пороговый элемент, выход каждого элемента фотоприемника подключен к одному...
Предыдущий патент: Нелинейное корректирующее устройство
Следующий патент: Система управления с координатно-параметрической обратной связью
Случайный патент: Устройство для дарсонвализации