Идентификатор параметров и состояния систем управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
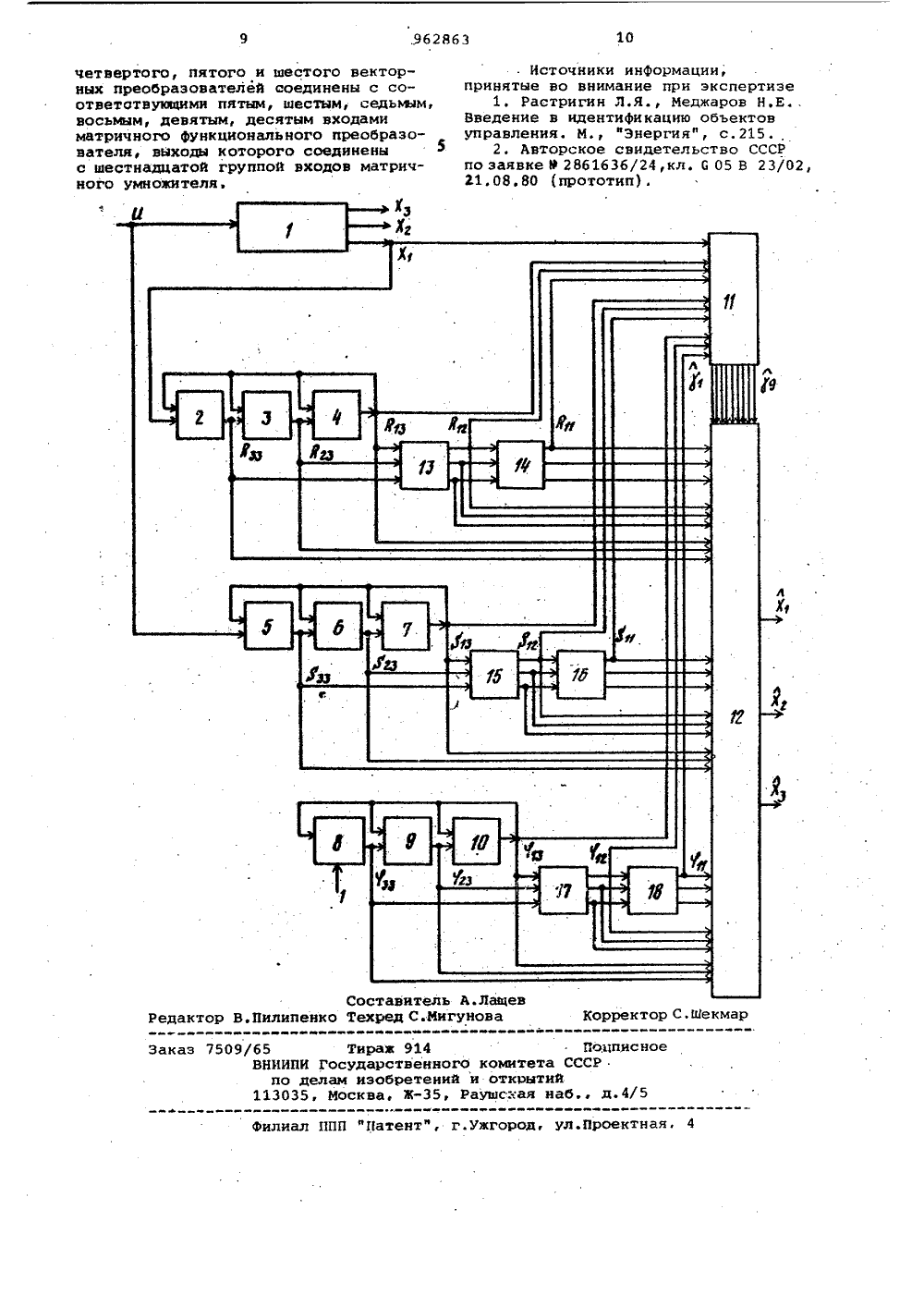
(23) Приоритет 6 05 В 23/02 Государственный комитет СССР но делам изобретений н открытийОпубликовано ЗОЯ 9.82. Бюллетень Йо 36 Дата опубликования описания 300932.:.Ф,: "-Московский институт электронного машиностроения Л."3":;(54) ИДЕНТИФИКАТОР ПАРАМЕТРОВ И СОСТОЯНИЯСИСТЕМ УПРАВЛЕНИЯ Изобоетение относится к автомати" ческому управлению и оегчлиоованию и предназначено для идентификации неизвестных параметров и восстановления неизмеряевых фазовых координат электромеханических, электрических и радиотехнических систем различного назначения.Известно устройство идентификации параметров системы управления, содержащее модель, блоки сравнейия, сумматоры, интеграторы и умножители 1.Однако данное устройство не позволяет одновременно вычислять неизвест ные параметры и неиэмеряемые фазовые координаты систем управления за наперед заданное время.Наиболее близким по технической сущности к предлагаемому является устройство, содержащее последовательно соединенные объект управления, первый, второй, третий интеграторы и матричный функциональный преобразователь, последовательно соединенные 25 четвертый, пятый и шестой интеграторы, последовательно соединенные седьмой, восьмой и девятый интеграторы, выход девятого интегратора соединен с вторыми входами седьмого, восьмого, 30 девятого интеграторов и матричного ФункциональногО преобразователя, выход шестого интегратора соединен с вторыми входами четвертого, пятого и шестого интеграторов и третьим входом матричного Функционального поеобразователя, выход третьего интегратора соединен с вторыми входами первого, второго и третьего интеграторов, вход объекта управления соединен с первым входом четвертого интегратора, а выход - с первым входом первого интегратора и четвертым вхо" дом матричного Функционального пре-. образователя (,2.Недостатком известного устройства является невысокая точность при одно" временном вычислении за фиксированное время неизвестных параметров и неизмеримых фазовых координат объекта.Цель изобретения - повышение точности устройства путем одновременного вычисления неизвестных параметров и неизмеряемых фазовых координат объекта за заданное время.Для достижения укаэанной цели иден тификатор содержит матричный умножитель, последовательно соединенные первый и второй векторные преобразователи, последовательно соединенные третий и четвертый векторные преобразователи, последовательно соединенные Пятый и шестой векторные преобразователи, первый вход первого векторно-, го преобразователя соединен с выходом 1третьего интегратора и первым входом матричного умножителя, второй вход - с выходом второго интегратора и вторым входом матричного умножителя, третий вход - с выходом первого ин тегратора и третьим входом матричного умножителя, первый вход третьего векторного преобразователя соединен с выходом шестого интегратора и четвертым входом матричного умножителя, 15 второй вход - с выходом пятого интегратора и пятым входом матричного ум, ножителя, третий вход - с выходом четвертого интегратора и шестым входом матричного умножителя. Пеояий 20 вход пятого векТорного преобразователя соединен с выходом девятого интегратораи седьмым входом матричного умножителя, второй вход - с выходом восьмого интегратора и восьмым входом матричного умножителя, третий вход - с выходом седьмого интегратора и девятым входом матричного умно жителя, выходы первого, второго, третьего, четвертого, пятого и шестого векторных преобразователей соединены с соответствующими десятой, одиннадцатой, двенадцатой, тринадцатой, четырнадцатой, пятнадцатой группами входов матричного умножителя, первые выходы первого, второго, третьего, четвертого, пятого и, шестого векторных преобразователей соединены с соответствующими пятым, шестым, седьмым, восьмым, девятым десятым входами матричного Функцио нального преобразователя, выходы которого соединены с шестнадцатОЙ группой входов матричного умножителя.На чертеже представлен идентификатор параметров и состояния объек та, описываемого дифференциальным уравнением третьего порядка (п=3.Идентификатор содержит объект1 управления, первую, вторую и тре.тью цепи из трех последовательно соединенных первого, второго, третьего 2-3-4, четвертого, пятого, шестого 5-6-7 и седьмого, восьмого, девятого 8-9-10 интеграторов, матричный Функциональный преобразователь 11, матричный умножитель 12 и три цепи иэ и=2 последовательно соединенных векторных преобразователей первого, второго 13-14, .третьего, четвертого 15-16 и пятого, шестого 17-18.Выходы матричного функционального 60 преобразователя 11 и выходы матричного умножителя 12 являются выходами устройства, где образуются соответственно оценки неизвестных пара" метров и г оценки неизмеряемых фазавых координат объекта 1 х (с), х (с)1.Работу идентификатора параметров и состояния систем управления можно описать математически,Введем обозначения: х(С)= Сх (С,) х 1(с),х 3(с) - вектор состоянйя объекта 1 (Т - символ транспортирования), х(с) - измеряемая выходная координата объекта 1; ц(с) - скалярный вход объекта 1, Р= Р, Рг 3 Р 31вектор выходов интеграторов 4,3,2, стоящих в первой цепи; 5 З=(5,51, 53 - вектор выходов интеграторов 7,6,5, стоящих во второй цепи; ф = 1 Ч,ЧЧД- вектор выходов интеграторов 10, 9, 8, стоящих в третьей цепи; Р 1 Р 1, Р 1, Р 31 т - выходы векторного преобразователя 13; Р 1=Р 1, Р 1,Р 313 - выходы векторного преобразователя 1.4; 5 л 511,511,51 и 51 5 т 1 51,5 з - выходы векторных преобразователей 15 и 16 соответственно;, ф 1 = Юс 1 Ч 1, Ч 31 и ф= Ч+,Ч 11,Ч 1) соответствующие выходы векторных преобразователей 17 и 18, ут)"1391 " вектор оценок неизвестных параметров объекта 1; х (х,хТ,х) - вектор оценки состояния х(х,х 1,х) объТ екта 1.Объект 1 управления описывается уравнениемх(с)-Ах(с)+ЬО(с),х(0)=х , (1) где д 1 в А=пхп, д 1 в, Ь=пх 1, д 1 а х(с)=пх 1, дю п(с)=1 х 1КоэфФициенты а, , а матрицы А и координаты Ь, , Ьп вектора Ь суть неизвестные постоянные. Неизвестны также координаты начальноговектора состояния х(0), , хп(0), Приборно измеряется вход п(с) и координата х 1(с) вектора .состояния х(с)= =сх ( С)1, х П( С Д объекта 1. Ос.тальные Фазовые координаты х,1(с), х(с)., х,(с) недоступны прямому измерению.Задача идентификатора параметров и состояния состоит в том, чтобы по измерениям входа п(с) и выхода х.,(с) объекта 1 управления на наперед заданном интервале времелни Э Сч, Т 1 вычис=л ,лфлить оценки аап, Ь. Ьп,хэ(0),х,(0) неизвестных йараметров а а, Ь, , Ь, х, (0), , хР). и од- новременно получить оценки х 1(с) л х.(с) неизмеряемых фазовых координат вектора х(с).Прибавляя к правой части (1) вектор Сх(с) (С - известная, постоянная., екта 1 управления, а один вход интегратора 5 соединен с входом объекта1 управления. На выходах интеграторов каждой цепи образуются векторэ(ц= р,(с) м Сс)в чз с)1 ) 5й 1( ) 2вс)ттри"цепи из последовательно соединенных векторных преобразователей 13-1014, 15-16 и 17-18 осуществляют вычисления по формулам (11) при =3 с целью получения остальных столбцов Матриц Ф(с), Р(с), 5(с).Матричный функциональный преобраэоватегтгь 11 вычйсляет оценку(тт)твектора неизвестныхпараметров т по формуле (6 ). Соот"ветствующие входы матричнрго функционального преобразователя 11 подключены к выходам интеграторов 4, 7,10,к ныходам Р 11,Рл векторных преобразователей 13, 14, к выходам 511,51,г векторных преобразователей 15, .16, квыходам сл, Ч векторных преобразо вателей 17 г 18, а также к выходу х 1объекта 1 управления. На выходе матричного Функционального преобразова теля образуются сигналы, численноравные оценкам хо, 2,р вектора неизвестных параметров г.Матричный умножитель 12 производит вычисление по формуле (,7 ). Соответствующие входы матричного умножителя 12 соединены с выходами интеграторов 2"10, векторных преобраэователей 13-18 и с выходами матричногофункционального преобразователя 11.На выходе матричного умножителя 12образуются сигналы, численно равныеоценкам неизмеряемых фазовых коордйнат х,1(с), х(с).Изобретение позволяет существенноповысить точность управления эа счет .вычисления оценок координат векторасостояния и неизвестных параметров 45за заданное время, которое можетбыть значительно меньше времени переходного процесса объекта управления.Изобретение расширяет область применения идентификаторов и может найти применение для управления объектами с неизвестными параметрами принеполной информации о координатахвектора состояния. Кроме повышенияточности и расширения области применения предлагаемый идентификаторпозволяет упростить первоначальнуюнакладку систем управления и снизитьэксплуатационные расходы,Формула изобретения Идентификатор параметров и состояния систем управления, содержащий последовательно соединенные объект управления, первый, второй, третийинтеграторы и матричный функциональный преобразователь, последовательносоединенные четвертый, пятый и шестойинтеграторы, последовательно соединенные седьмой, восьмой и девятый интеграторы, выход девятого интеграторасоединен с вторыми входами седьмого,восьмого, девятого интеграторов иматричного функционального преобразователя, выход шестого интеграторасоединен с вторыми входами четвертого, пятого и шестого интеграторон итретьим входом матричного функцио"нальноГо преобразователя, выход третьего интегратора соединен с нторыми входами первого, нторого и третьего интеграторов, вход объекта управления соединен с первым входом четвертого интегратора, а выход - с первым входом первого интегратора ичетвертым входом матричного функцио"нального преобразователя, о т л и -ч а ю щ и й с я тем, что, с цельюповышения точности идентификатора путем одновременного вычисления неизвестных параметров и неизмеряемыхфазовых координат объекта эа заданное.время, в него введены матричный умножитель, последовательно соединенныепервый и второй векторные преобразователи, последовательно соединенныетретий и четвертый векторные преобразователи, последовательно соединенныепятый и шестой векторные преобразователи, первый вход первого векторногопреобразователя соединен с выходомтретьего интегратора и первым входомматричного умножителя, нторой вход -с выходом второго интегратора и вторым входом матричного умножителя,третий вход - с выходом первого ин,тегратора и третьим входом матричногоумножителя, первый вход третьего векторного преобразонателя соединен свыходом шестого интегратора и четвертым входом матричного умножителя,второй вход - с выходом пятого интегратора и пятым входом матричного умно"жителя, третий вход в с выходом четвертого интегратора и шестым входомматричного умножителя, первый входпятого векторного преобразователясоединен с выходом девятого интегратора и седьмым входом матричного умножителя, второй вход - с выходомвосьмого интегратора и восьмым входом матричного умножителя, третийвход - с выходом седьмого интегратора и девятым входом матричного умножителя, выходы первого, второго,третьего, четвертого, пятого и шесто-60 го векторных преобразователей соединены с соответствукщими десятой, одиннадцатой, двенадцатой, тринадцатой,четырнадцатой, пятнадцатой группамивходов матричного умножителя, первые 65 входы первого, второготретьего,,.962863 орректор С. Шекмар Пилипенко Техред С.Иигунов ак Поцписноа СССРийнаб., д,4/5 Тираж 914осударственного комит ам изобретений и откр Москва, Ж, Раушска 09/65 ВНИИПИ по д 113035аказ илиал ППП "Патентф, г.ужгород, ул.Проект 4 четвертого, пятого и шестого векторных преобразователей соединены с соответствующими пятым, шестым, седы нм,восьмым, девятым, десятым входамиматричного функционального преобразователя, выходы которого соединеныс шестнадцатой группой входов матричного умножителя.. Источники инФормации,принятые во внимание при экспертизе1. Растригии Л.Я., Меджаров Н.ЕВведение в Идентификацию объектовуправления. И., фЭнергия", с.215,2. Авторское свидетельство СССРпо заявке 9 2861636/24,кл. С 05 В 23/02,21.08.80 (прототип).
СмотретьЗаявка
3261537, 18.03.1981
МОСКОВСКИЙ ИНСТИТУТ ЭЛЕКТРОННОГО МАШИНОСТРОЕНИЯ
КОПЫСОВ ОЛЕГ ЮРЬЕВИЧ, ПРОКОПОВ БОРИС ИВАНОВИЧ, ПУПКОВ КОНСТАНТИН АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 23/02
Метки: идентификатор, параметров, систем, состояния
Опубликовано: 30.09.1982
Код ссылки
<a href="https://patents.su/5-962863-identifikator-parametrov-i-sostoyaniya-sistem-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Идентификатор параметров и состояния систем управления</a>
Цифровой интегратор

Номер патента: 1042015
Опубликовано: 15.09.1983
Авторы: Гузик, Криворучко, Попова
МПК: G06F 7/64
Метки: интегратор, цифровой
...элемента ИЛИ, выход которого соединен с пятым выходом блока,пятый вход блока соединен с первыми 5входами третьего и пятого элементовИ, шестой вход блока соединен свторым входом четвертого элементаИ и первым входом шестого элементаИ, седьмой вход блока соединен с 10первым вхбдом двенадцатого элементаИ, выход которого соединен с вторьа 4входом четвертого элемента ИЛИ,восьмой вход блока соединен с первЫмвходом девятого элемента И, девятый вход блока соединен с вторымивходами девятого, пятого и шестогоэлементов И, входом первого элемента НЕ, первым и вторым входами элемента ИЛИ-НЕ, выход которого соединен с вторым входом второго элемента И, второй Вход третьего элементаИ подключен к девятому входу блока,десятый вход блока соединен с...
Адаптивная система регулирования объекта с нестационарной характеристикой, например, дуговой сталеплавильной печи

Номер патента: 1068891
Опубликовано: 23.01.1984
Авторы: Авдеев, Демичев, Дубовик, Изаак, Коровин, Кузнецов, Мышляев, Носырев, Чухов
МПК: G05B 13/02
Метки: адаптивная, дуговой, например, нестационарной, объекта, печи, сталеплавильной, характеристикой
...включенныевторой блок задержки, третий блоксравнения, четвертый блок памятии второй йереключатель с вторым входом пятого блока сравнения, выход первого фильтра низкой частотыподключен к первым входам первого и второго блоков памяти, первогоблока сравнения, через первыйблок задержки - к первому входу шестого 40блока сравнения, через последовательно включенные второй экстраполятор, третий блок задержки, первый блок сравнения, третий блокпамяти и первый переключатель - к 45 входам первого блока определения модуля, сйгнум-реле и второму входу первого блока умножения, выхбдпятого задатчика подключен черезвторой блок сравнения к вторым 50входам третьего и четвертого блоков памяти, к. управляющим входампервого и второго...
Устройство для определения границы области работоспособности технических объектов

Номер патента: 750441
Опубликовано: 23.07.1980
Авторы: Авхач, Краснов, Светликов, Юдин
МПК: G05B 23/02
Метки: границы, области, объектов, работоспособности, технических
...11. 441 8 но единице. Сигнал с выхода пешифратора 23 подается на вторые входы элементовИ 22 и 29 (фиг, 2) и на третий вход блока памяти 6 (фиг. 1), которые фикЕсли при Х 1 = Хцц,и Хд = Ъ мни + + ЬХ отображающая точка находится в области б, то появляется сигнал только с выхода первого разряпа реверсивного счетчика 1, который подается на соответствующие входы элементов И 12, 18, 13. На другие входы элемента И 18 подают:ся сигналы с выходов элементов НЕ 17 и 191Выходной сигнал элемента И 18 через элемент ИЛИ 16 подается на первый вход элемента И 36, выходной сигнал которого подается на третий-вход блока вычислеРегистрирующий блок 5 фиксирует координаты точки Ц.Сигнал с первого выхода логического блока 4 попается на входы элементов И...
Система оптимального управления колебательными объектами произвольного порядка

Номер патента: 1092467
Опубликовано: 15.05.1984
Авторы: Синеглазов, Синицын
МПК: G05B 13/02
Метки: колебательными, объектами, оптимального, порядка, произвольного
...входом (и)- го коммутирующего устройства первой группы 14 и первыми входами второго 20, третьего 21 1-го 22 (и)-го 23 элементов ИЛИ, выходы которых подключены к вторым входам соответствуюийх блоков управленя 6, 789 и вторым управляющим входам соответствующих коммутирующих устройств первой группы 11 .,1213,14,кроме второго элемента ИЛИ 20, первые входы блоков управления 6,7, ,8. 9,10, кроме (п)-го, подключены к третьим входам соответствующих прогнозирующих моделей 2, ,34,5, четвертые выходы второго 7. . . 1-го 8 (и)-го 9, (и)-го 1 О блоков управления подключены ко вторым, ,23, выходы первого 24,второго 25. , (1.-2)-го 26 (и) -го 2 коммутируницих устройств третьей группы соединены с третьими, четвертыми, входами прогнозирующих...
Имитатор изображения точечных объектов

Номер патента: 1425761
Опубликовано: 23.09.1988
Авторы: Васильев, Кравченко, Потехин, Щербаков
МПК: G09B 9/00
Метки: изображения, имитатор, объектов, точечных
...единицу, и процесс воспроизведения повторяется. За один обратный ход луча .елевизионной разверткисчйтывается информация с блоков 9и 11 для двух значений выходов счетчика 2.Режим записи блока 15 осуществ- ЗО,ляется при воспроизведении данныхблока 9. С выхода 1 блока 9 на вход1 блока 15 поступает информация окоде яркости и номере канала точечного объекта, с выхода 2 блока 9 навход 1 регистра-мультиплексора 12поступает информация о координатеХ, и при управляющих воздействиях,поступающих с блока 7 управления навходы 3 и 4 регистра-мультиплексора, коммутируется на второй входблока 15. Импульс, поступающий стретьего выхода блока 9 на вход 3блока 15, Формирует импульс записикода яркости по адресу, установленному значением координаты Х и...
Предыдущий патент: Устройство для контроля параметров
Следующий патент: Устройство для централизованного контроля параметров
Случайный патент: Способ изготовления пластмассовых сцинтилляторов большого размера со светособиранием на основе световодов-сместителей спектра