Устройство для управления автоматическими линиями
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 744472
Авторы: Антонов, Воробьев, Карлов, Федоренков





Текст
1 744472 Союз СоветскихСоциалистическихРеспублик ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУОпубликовано 30.06.80. Беллетень 24 ло делам изобретений н открытнйДата опубликования описания 30,06,80(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ,"ЛИНИЯМИИзобретение относится к автоматизации производственных процессов и может быть использовано в линиях химической обработки печатных плат в радиозлектронной промышленности.Известны устройства для управления автомат тическими линиями, содержашие программный коммутатор, датчики положения автооператора на линии, блок авто,.1 атического выбора направления перемещения автооператора, блок управления исполнительными механизмами 11 и 121.Недостатком известных устройств является применение трех датчиков для каждой позиции останова: предварительного торможения, фиксированного останова и двоичного датчика положе. ния автооператора на линии, что приводит к увеличению суммарной диттамической ошибки при остановке автооператора на заданной позиции. Это, в свою очередь, вызывает увеличение габаритов ванн и линии, Применение в уст.ройстве торможения двигателя электромагнитного20 тормоза вызывает частую регулировку тормоза вследствие деформации прижимаюшей пружины. Кроме того, неисправность схемы автоматического выбора направления перемещения автооператора (например, заляпание контактов реле, или динамическая ошибка в двоичном дат- чике положения автооператора на линия) приводит к ложному выбору направления перемещения, что недопустимо при управлении процессом химической обработки печатных плат.Наиболее близким техническим решением к изобретению является устройство для управления автоматическими линиями, содержашее блок датчиков перемещений, соединенный с блоком переработки информации, программный блок, реверсивный блок счета позиций, соеди. пенный с регистром счета позиций, блок счета времени, регистр команд, регистр задания пози. ций, блок управления автооператором, соединен. ный с регистрами задания позиций и счета позиций через блок совпадений, исполнительный механизм, соединенный с блоком управления авто. оператором и с блоком датчиков перемешений, выходы блока переработки информации подключены к программному блоку, реверсивному бло. ку счета позиций, блоку счета времени и блоку управления автооператором, один из выходов3которого соединен с блоком счета времени, а входы - непосредственно через блок совпа- дений с блоком счета времени и через регистр команд с программным блоком, выходы которого подключены к регистру команд и регистр задания позиций 131.Недостатками устройства, является невозмож ность оперативной, непрограммной коррекции временной выдержки печатных плат в ванне по мере истощения раствора и некоторая громоздкость аппаратурного решения, связанная с введением двух регистров - распределителей Кроме того, отсутствие датчика занятой ванны и схемы автоматического выбора направления перемещения автооператора является причиной аварийной ситуации на линии.Цель изобретения - повышение надежности и точностиустройства за счет установления стр гого приоритета исполнения операций и учета изменений состояния позиций во времени.Указанная цель достигается тем, что "в извес ное устройство для управления автоматическим линиями, содержащее блок ввода программы и управления, первые вход и выход которого соединены соответственно с выходом и с первым входом блока задания времени, второй . выход - со входом исполнительных механизмо второй вход и третий выход - с выходом и первым входом первого блока сравнения соответственно, второй вход которого подключен к первому выходу блока датчиков, соединенного входом с первым выходом исполнительных механизмов, введены блок приоритета операций, второй и третий блоки сравнения, блок диагностики технологических йараметоов) блок коррекции программы, блок задания уста вок технологическихпараметров и блок контроля исполнения операций, три входа которого подключены ко второму выходу блока датчиков, первому выходу блока задания уставок технологических параметров и четвертому выходу блока ввода программы и управления соответственно, а два выхода - к третьему входу блока ввода программы и управления и первому входу блока диагностики технологических параметров, соединенного вторым входом с пятым выходом блока ввода программы и управления, третьим входом - с третьим выходом блока датчиков и выходом - с йервым входом блока коррекции программы, первый выход которого подключен к четвертому входу блока ввода программы и управления, второй выход - ко второму входу блока задания времени, второй вход - ко второму выходу блока задания уставок технологических параметров, соединенного входом с выходом блока йриоритета операций, первые входы которого подключены к шестым выходам блока ввода программы и управления, а вторые - к тре 744472 атьим входам блока коррекции программы, двавхода второго блока сравнения соединены счетвертым выходом блока датчиков и седьмымвыходом блока ввода программы и управленияф у а два выхода - с пятыр входом ввода программы и управления и первым входом третьего блока сравнения, второй вход которого подключен ко второму выходу исполнительныхмеханизмов; а выход - к шестому входу бло 10 ка ввода программы и управления.На чертеже представлена блок. схема устройства.Устройство для управления автоматическимилиниями содержит блок 1 ввода программыи управления, блок 2 датчиков, блок 3 зада.ния времени, первый блок 4 сравнения, формирователь 5 управляющих сигналов, исполнио- тельные механизмы Ь, блок 7 приоритета операций, второй блок 8 сравнения, третий блок9 сравнения, блок 10 диагностики технологичест. ких параметров, блок 11 коррекции программы, и блок 12 задания уставок технологических параметров, блок 13 контроля исполнения операций, узел 14 ввода информации.25 лок 1 ВВода программы и управления предназначен для обеспечения информацией и взаимо. в, связанной работы блоков. Узел 14 определяетпоследовательность всех операций, проводимыхавтооператором и производит необходимуюкоммутацию цепей в блоке 3 задания времении формирователе 5 управляющих сигналов, Программа, нанесенная на носитель информации,обладает определенной информационной избыточностью. Имеющаяся информационная избыточностьиспользуется для контроля исполнения операцийвблоке 13 контроля исполнения операций. Общая синхронизация узла 14 обеспечиваеся сигилами блока 7 приоритета операций.Блок 1 задает также.предельные значенияосновных электрических параметров линии ичерез блок 10 диагностики технологическихпараметров и второй блок 8 сравнения обеспечивает сравнение величины контролируемыхпараметров сих эталонными значениями.45 Блок 2 датчиков используется для выдачиуправляюшях сигналов во все блоки устройства, связанные с регистрацией и отработкойсигналов об истинном положении автооператора.Исходной информацией для этого блока 2 яв 50ляется информация с датчиков положения автооператора на линии, с датчиков занятых ванн, сдатчиков верхнего или нижнего положения карет.ки (на чертеже не показаны).Блок 3 задания времени служит для обеспечения заданной выдержки времени на каждойтехнологической операции и управляется сигна.лами узла 14 и блока 11 коррекции програм.мы, Основными узлами блока 3 являютсявысокоточные реле времени. Управляющие5 744472 6сигналы из узла 14 осуществляют програм- движения автооператора, являющейся составноймное изменение количества дискретных отсче. частью формирователя 5, Такой контроль обес.тов для выбранного реле времени. По сигна. печивается информационной избыточностью, эалоламиз блока 11 коррекции программы осу- женкой в программе узла 14. В кадре програм.ществляется непрограммная оперативная ко 1-" 5 мы указывается йе только йоэйгрН"останова,рекция временных интервалов на линии путем но и нат 1 равление перемещЬйия автоонератора.изменения цены программной метки времени. Код направления перемещения, заложенный вПервый блок 4 сравнения производит анализ программе, сравнивается в блоке 9 сравненияинформации, полученной из узла 14 и блока 2 с кодом со схемы автоматического выборадатчиков по сигналам с датчйков и выдаетв" 10 направления перемещения формирователя 5.формирователь 5 управляющих сигналов сигнал Это существенно повышает надежность устройна продолжение движения автооператора до сов-ства и предотвращает возможностьвознккиове-"падения кодов с носителя информацииислинии. ння аварийной ситуации на линии вследствиеФормирователь 5 управляющих сигналов обес- сбоя в работе формирователя 5.печивает синхронную работу исполнительных ме. 15 Блок 10 диагностики технологических пара.ханизмов б на линии, Основными тактующими метров обеспечивает оперативный программныйсигналами для этого блока являются сигналы и аппаратный контроль технологического произ узла 14 ввода информации и блока 3 зада- цесса путем сравнения программных уставокния времени. По этим сигналам обеспечивается с эталонными, а также выводит на заданныйвключение исполнительных механизмов авто-режим работы нагреватели растворов ванн, колооператора и выполнение команд "Вперед", риферы для сушки печатных плат, псдцержива."Назад", "Опускание", "Подъем". По окончании ет заданные плотности растворов, Сигнализациякоманды выдается сигнал в узел 14 на смену блока 10 указывает позицию, на которой нахокадра программы. дится автооператор, адрес следующей позицииИспольнительные механизмы 6 имеют два д останова, состояние датчиков ванн, состояниеРеверсивных привода,.обеспечивающих горизон- нагревателей, предельные значения уставок,тальное движение автооператораи вертикаль.ное движение каретки с печатными платами. " Блок 11 коррекции программы используетсяВключение приводов производится специальны- для непрограммного изменения технОлогическогоми контакторами, которые имеют сигнальные З 0 процесса, Такая коррекция может задаваться изконтакты для передачи в третий блок 9 срав- блока 7 приоритета операций и из блока 12 за.нения кодированной информации о направле- дания уставок технологических параметров ииии движения, может быть вызвана исто.дением растворовБлок 7 приоритета операций осуществляет в ваннах. В этом случае по сигналу иэ блокаанализ действий, которые должен выполнить з 12, свидетельствующем об изменении плотности35автооператор в одном кадре программы и опре. Растворов, в блоке 11 коррекции программыделяет их приоритет и последовательность. Схе- производится изменениецены временцойвыдержма этого блока 7 выполнена в виде распреде- ки, приходящейся на единицу дискретного отлителя и наборного коммутатора (на чертеже чета времени. Это означает, что одной и тойне показаны), что позволяет выполнить в од же временной метке программоносителя буном кадре программы целую совокупность опе- дет соответствовать большая временная выдерж.раций по обслуживанию такого технологичес- ка.кого процесса, когда автооператор последователь. Блок 12 задания уставок технологическихно переносит кассету с платами по ваннам, рас параметров определяет-точность отработкиположенным одна за другой. Имеется возмож- технологических уставок исполнительными45ность программного обращения к одному из устройствами линии и задает пределы измепеисполнительных механизмов б, непосредственно ний сравниваемых и измеряемых величин,связанному с формирователем 5, Заданный порядок съема значений контролируеВо втором блоке 8 сравнения производится мых параметров: величины тормозного пути, тем.регистрация текущих положений после подачи; пературы,плотностирастворовит.д,проводитсяиз блока 2 датчиков сигнала на торможение по сигналам из блока 7 приоритета операций.одного из исполнительных механизмов 6. Блок Блок 12 по выходам непосредственно связан8 производит периодическую подачу тормозных с блоком 11 коррекции программы и с блоимпульсов в формирователь 5. ком 13 контроля исполнения операций 13. ВВыдача тормозных импульсов прекращается этих блоках происходит непосредственное сравпо сигналам из блока 2 датчиков по достиже некие технологических уставок, тогда как внии автооператором заданного положения.блоке 12 обеспечиваются необходимые интерТретий блок 9 сравнения обеспечивает конт- валы времени между моментами их подачи - -роль схемы автоматического выбора направления и сравнения.744472 8блок 11 коррекции программы в заданныециклограммой моменты времени.Предлагаемое устройство для управленияавтоматическими линиями позволяет более пол.но использовать дефицитные химические растворы, уменьшить габариты ванн. Это имеет прямое отношение к проблеме нейтрализации химических растворов и охране окружающей среды,так как приводит к уменьшению вредных отходов, при этом обеспечивается высокая производительность и надежность устройства.Экономический эффект использования изобре.тения составляет 44 тыс. руб. в год. 5 Формула изобретения 7Блок 13 контроля исполнения операцийобеспечивает проверку правильности отработкиавтооператором технологических операций, заданных программой, а также производитлоги.ческий анализ с целйо определения техничес кого сбстояния линии инахождение места не.исправности. По сигналам из блока 2 датчикови из узла 14 ввода информации производитсяоперативный контроль путем сравнения кодированной информации с датчиков линии и информации с программоносителя. Блок 13 включает в себя и генераторы стимулов, основноеназначение которых - генерация и формирование возбуждающих сигналов. Сюда относятсятакже генератор электрического напряжениядля проверки датчиков температуры и генератор временных интервалов для проверки схемзадания временных установок и определениявремени торможения 1 на чертеже не показаны),Устройство для управления автоматическимилиниями работает следуюшим образом.Перед началом работы производится подкадровая проверка изготовленной программы,Проверка производится путем последовательного выполнения операций циклограммы, задаваемых клавишным устройством блока приоритета операций 7 и сравнения с информацией,записанной на программоносителе. Такой кон.троль дает возможность произвести отработкузаданной циклограммы работы автооператораи выявить ошибки, связанные с неверным ад.ресованием. Ошибки обнаруживаются схемойавтоматического выбора направления движения в формирователе 5 благодаря информационной избыточности,35После этого, программа автоматически устанавливается на начало цикла по соответствующей метке на программоносителе. Нажимаетсякнопка "Пуск", и автооператор начинает испол, нение первой команды "а распреде)Фтейь - коммутатор блока 7 приоритета операций приводится в исходное состояние. При горизонтальномдвижении автооператора блок сравнения 4 производит последовательное сравнение кодов с- позиционных датчиков линни и кода программы, После выполнения всех операций на даннойпозиции распределителя-коммутатора блока 7приоритета операций срабатывает старт.стопныймеханизм перемещения программоносителя вузле 14, под считывающей головкой устанавли. вается новый кадр программы. Формирователь5 выдает в блок 8 сравнения сигнал на выдачутормозного импульса моментвыдачи которогозадается из блока 2 датчиков. В блоке 13 контроля исполнения операций фиксируется правильность исполнения операций. Блок 7 приоритетаопераций отслеживает очередность исполненияопераций в заданном кадре программы и выдает в блок 12 команды на вводуставок в Устройство для управления автоматическимилиниями, содержащее блок ввода программыи управления, первые вход и выход которогосоединены соответственно с выходом и с первымвходом блока задания времени, второй выходсо входом исполнительных механизмов, второйвход и третий выход - с выходом и первым 1 входом первого блока сравнения соответствен.но, второй вход которого подключен к перво.му входу блока датчиков, соединенного входомс первым выходом исполнительных механизмов,о т л и ч а ю ш е е с я тем, что, с целью повышения надежности и точности устройства, оносодержит блок приоритета операций, второй итретий блоки сравнения, блок диагностики тех.нологических параметров, блок коррекции программы, блок задания уставок технологическихпараметров и блок контроля исполнения операций, три входа которого подключены ко второму выходу блока датчиков, первому вь;ходублока задания уставок технологических параметров и четвертому выходу блокаввода программь 1-:Ь и управления соотввтственйо, а два выхода ="ктретьему входу блока ввода программы иуправления и первому входу блока диагностикитехнологических параметров, соединенного вторым входом с пятым выходом блока вводапрограммы и управления, третьим входом - с1 третьим выходом блока датчиков и выходомс первым входом блока коррекции программыпервый выход которого подключен к четвертому входу блока ввода программы и управления, второй выход - ко второму входу блока задания времени, второй вход - ко второму выходу блока задания уставок технологических параметров, соединенного входом с выходом блока приоритета операций, первые входыкоторого подключены к шестым выходам блокаввода программы и управления, а вторые -к третьим входам блока коррекции программы два входа второго блока сравнения соединеныс четвертым выходом блока датчиков с седь3. Авторское свидетельство СССР Ио 336648,кл. 6 05 В 23/00, 1972. Составитель Н. БелинковаТехред М, Кузьма Корректо ста Редакт Дол каз 3788/10 ПодписноСР Тираж 956Государственного комам изобретений и открква, Ж - 35, Раушская ИИП итета ССытийаб., д. 4 по дел113035, Мо жгород, ул. Проектная,П "Патент",Филиал 9 744472 10мым выходом блока ввода программы и управ. Кондрашов А, С, Управление горизонтальления, а два выхода - с пятым входом блока ным перемещениемавтооператора. Передовойввода программы и управления и первым вхо- научно. технический производственный опыт.дом третьего блока сравнения, второй вход ко- К 6 - 68 - 1225/81, 1968.торого подклМчен ко второму выходу испол 2. Авторское свидетельство СССР М 394755,входу блока ввода программы и управления.Источники информации,принятые во внимание при экспертизе
СмотретьЗаявка
2557954, 20.12.1977
ПРЕДПРИЯТИЕ ПЯ А-3313, ПРЕДПРИЯТИЕ ПЯ А-1001
АНТОНОВ ОЛЕГ ВАСИЛЬЕВИЧ, ВОРОБЬЕВ ПЕТР ТИХОНОВИЧ, КАРЛОВ АЛЕКСАНДР ВАСИЛЬЕВИЧ, ФЕДОРЕНКОВ ЕВГЕНИЙ ДАНИЛОВИЧ
МПК / Метки
МПК: G05B 19/02, G05B 23/00
Метки: автоматическими, линиями
Опубликовано: 30.06.1980
Код ссылки
<a href="https://patents.su/5-744472-ustrojjstvo-dlya-upravleniya-avtomaticheskimi-liniyami.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления автоматическими линиями</a>
Устройство для регистрации времени входа и выхода

Номер патента: 875415
Опубликовано: 23.10.1981
Авторы: Баженов, Графенбергер, Матвеев, Чех, Шкроб
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...7 памяти, способный хранить его (один) массив информации. Он хранится здесь до,тех пор, пока 5 4вахтер охраны (иди устройство идентификации) не убедится в соответствиитабельному номеру лица фактически следующего через контроль. По окончанииэФой операции сотрудник охраны (илиустройство идентификадии) замыкаетвторой ключ 8, вследствие чего массивинформации поступает в блок 9 выдачиинформации, и записывается на магнитную ленту. Одновременно на вход блока 11 индикации поступает через второй ключ 8 сигнал переключения, по исполнении которого система возвращается в исходное состояние. Процесс по- .вторяется, как только очередной сотрудник увидит зеленый сигнал блокаиндикацииЧастота следования сотрудников определяется временем их...
Устройство для регистрации времени входа и выхода

Номер патента: 898478
Опубликовано: 15.01.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...17 отображения, блок 18 печати.Блок б управления, блок 8 регистрации, программный блок 12 реализованы на базе микропроцессоров иу 5 перепрограммируемых постоянных запоминающих устройств.При наличии заявки с любого блока 2 считывания, коммутатор 3 последовательно опрашивает и отыскивает блок считывания, в котором содержится код жетона-пропуска. Датчики 1 направления дополняют этот код кодом направления движения (приход на предприятие или уход иэ предприятия). Полученный код через коммута/ тор 3 поступает в приемный регистр 4 и через него в блок 5 контроля кода. Код жетона-пропуска определяет адреса ячеек программного блока 12 и блока 8 регистрации. Если код жетона-пропуска считан верно, то блок б управления считывает код...
Устройство для регистрации времени входа и выхода

Номер патента: 963026
Опубликовано: 30.09.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...впемени входаи выхода содержит датчики.1 направления, 55блок 2 считывания, элементы И 3 и 4, компараторы 5, задатчики 6 адреса, элементы ИЛИ7 и 8, блок 9 контроля кода, блок 1 О управ. ления, счетчик 11 импульсов, блок 12 регист. рации, датчик 13 времени и пульт 4 управления.При наличии заявки с любого блока 2 считывания через первый элемент ИЛИ 7 запускается блок 10 управления, который сЬормирует1код текущего адреса блока 2 считывания и выдает его на компараторы 5. В задатчиках 6 адресов блоков 2 считывания при монтаже устройства заложены их порядковые номера. Комнаратор 5, укоторого поступивший код совпал с кодом задатчика 6 алреса, открывает элементы И 3 и 4. Инфоомация, считываемая с жетона - пропуска, ппедставляет собой...
Устройство для обнаружения ошибок в блоках памяти программ
Номер патента: 1278982
Опубликовано: 23.12.1986
МПК: G11C 29/00
Метки: блоках, обнаружения, ошибок, памяти, программ
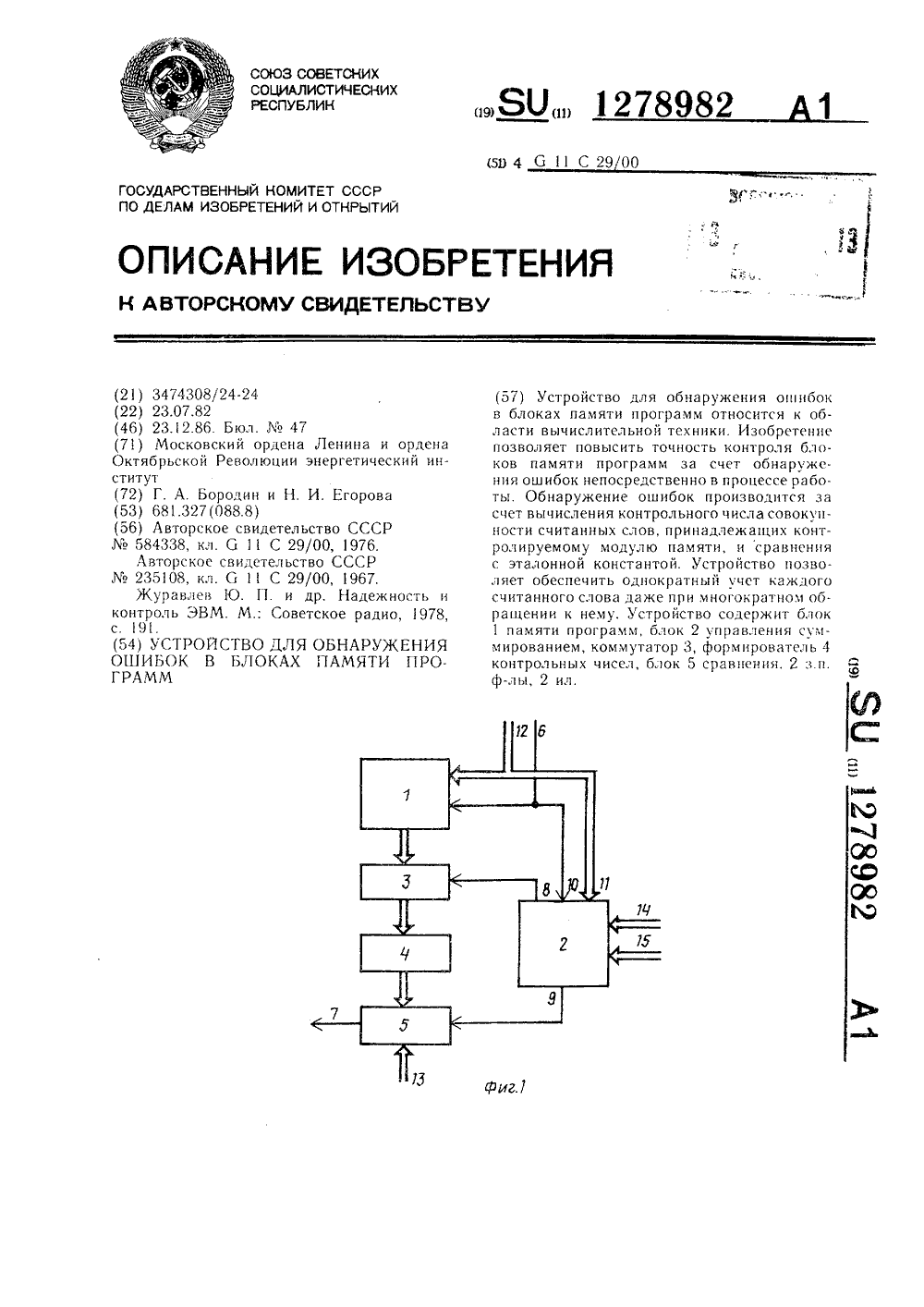
...совылают, цто означает оорыИсце к коц; ролируслому модуло памяги, тс б,Ок 9 .рыв 110- ция вырабатывает разрспы юИи й 1 с)тс 1 сиыл, поступаю)ций на 1)-вход тр. геры 20. Импульс разрешения выооркц по вход, 6 ностуцает церез коммутатор 18 Еа вход оловибратора 21, кото)ый формируе; импульс нужной е.телыОс) и л.)я обрыИе;1 я к блоку 32 Опс.ративОЙ 1.2 МИЕИ, 10 сту цые 01 пи Й рез формирователь 25 ы в:ол 35 Колыадресов младших разрядов в это время через коммутатор 38 поступают на вход 34. г 1 о входу 31 установлен режим считывания из блока 32 памяти. В результате этого по здпрашиваемому адресу выбирается информация (единица или ноль). Возможны двд про. должения работы блока 2:1. Если считывается единица - признак первого обращения по...
Устройство автоматического управления скоростью движения рудничного электровоза

Номер патента: 1004168
Опубликовано: 15.03.1983
Авторы: Зрожевский, Левенец, Маркелов, Сисев
МПК: B60L 15/20
Метки: движения, рудничного, скоростью, электровоза
...так и отрицательные значения. Для выделения максимального рассогласования между заданной мгновенной скоростью и фактическими скоростями блок 12 выделения максимального и минимального сигнала в зависимости от знака выходного сигнала интегратора 13 переключается или в режим определения максимальной величины, или в режим оп 5 1 О 15 20 25 30 35 4 О45 50 55 ределения минимальной величины, при этом учитываются и знаки, и абсолютные значения рассогласований. Таким образом, при разгоне выделяется большее положительное (максимальное) рассогласование, а при торможении - более отрицательное (минимальное) рассогласование, что обеспечивает обнаружение боксования и юза колес как при двух, так и при одной боксующей или юзующей колесной...
Предыдущий патент: Пневматическое устройство для централизованного контроля
Следующий патент: Идентификатор возмущающих и управляющих воздействий
Случайный патент: Система для сбора и передачи информации