Система управления движением судна
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
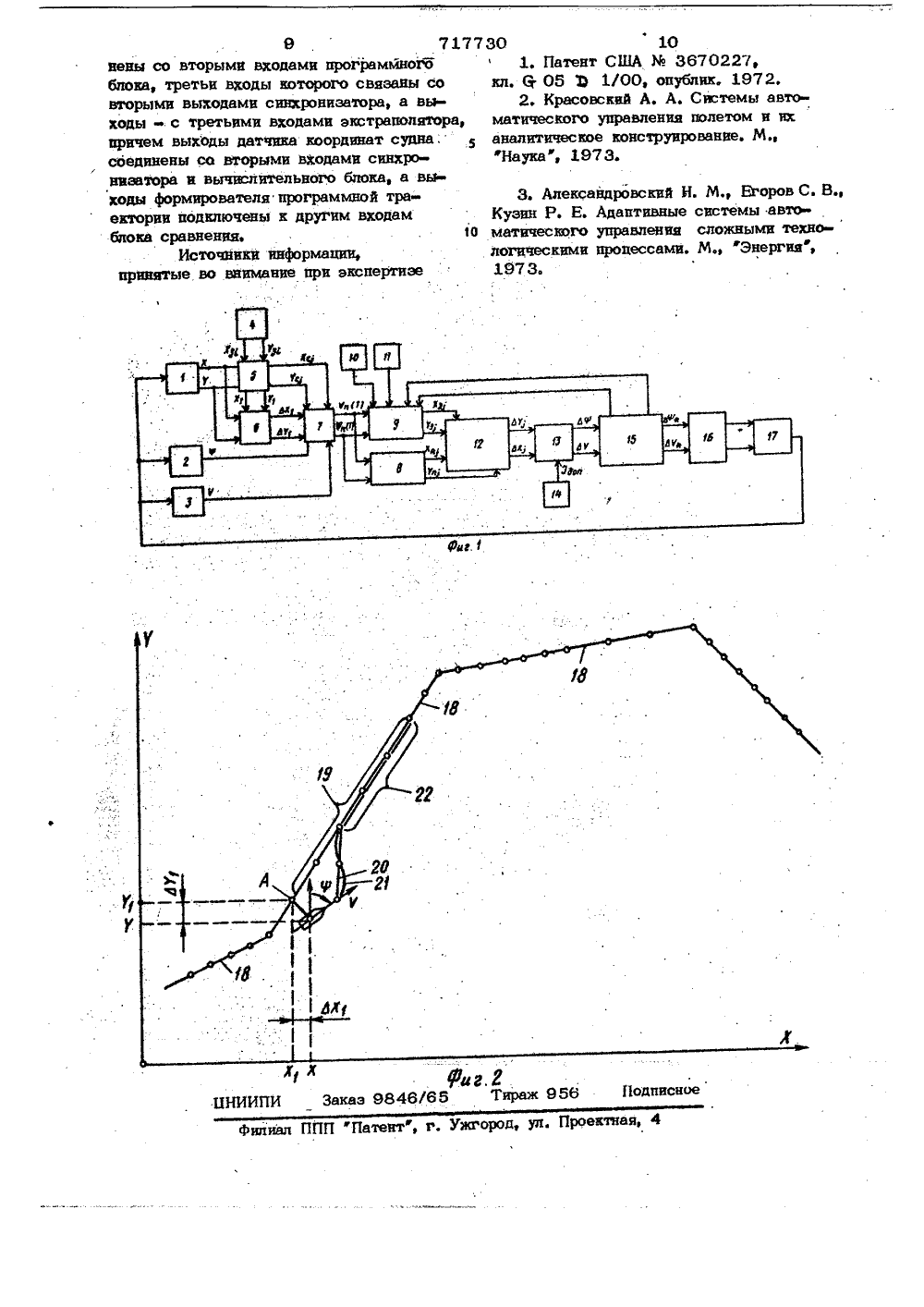
ович, В, Е. Кудр и И. Р. фрейдзо 2) Авторы изобретения ий ордена Ленина алектротехннческий инстит имени В. И. Ульянова (Ленина) Ленингр Заявитель Я ДВИЖЕ НА ва, обеспе.по заданнойьзуется прин делью о2редназна илизации еспечив(54) СИСТЕМА УПРА Изобретение относится к устройствам точного управлении движением научноисследовательских судов на шельфе и в Мировом океане для проведения специальных геолого-геофизических работ и,5 главным образом, при управлении судами, когда необходимо обеспечивать маневрирование как курсом, так и скоростью в соответствии с заданной программой геолого-геофизических работ, т.е. обеспечивать точное маневрирование судна по заданной траектории с заданной скорос" тью, когда проявляются существенные нелинейные свойства судна как управля емого объекта, в частности при движении иа малых скоростях хода судна, когда снижается аффективность действия руля иухудшается управляемость судна.Основным критерием качества функционирования таких систем является достижение необходимой точности движения по заданной траектории с заданной скоростью, обусловленной спецификой геоло го-геофизических работ.. Д. Леонтьев, В. А, Нечаев Известно устройство для стабилизации судна на гиперболической траектории, являющейся геометрическим местом точек, имеющих одинаковую разность фаз между колебаниями двух синфазных передатчиков фазовой радионавигационной системы, содержащее приемник фазовой радионавигационной системы (датчик разности фаз), датчик курса, блок управления рулевой машиной ЯНедостатком данного устройства является невозможность управления судном по какой-либо траектории, отличной от гиперболической траектории и невозможность автоматического управления скоростью движения.Известны также устройстчивающие. движение объектовтраектории, в которых исполцип управления с мо бъекта в контуре управленияЭти устройства п чены для решении задач стаб курса и траектории, но не об ают управле3, 7177 ния по траектории, когда необходимо йе только обеспечивать минимальное отклонение от задайной линии, но и осуществлять автоматическое управление скоростью в режиме маневрирования по прог 5 рамме.Наиболее близкими по технической сущности к предлагаемой являются системы управления с прогнозирующими подстраиваемыми; моделями, работающие по принципу упреждающей коррекции. Такие автоматические системы управления имеют следующую обобщенную структуру, Система датчиков, характеризующая состояния управляемого объекта, подключена к экстраполятору динамических характеристик объекта, к другим входам которого подключены задатчик начальных условий и датчик внешних возмущений, а выход "экстраполятора подключен либо к блоку сравнения, к другому входу которой подключен датчик заданных характеристик процесса управления, либо непосредственно. к вычислителю критерия качества, последовательно соединенного с оптимизатором 25 и коммутатором, один из двух выходов которого подключен к экстраполятору, чем организована обратная связь для поиска оптимальных управляющих воздействий, другой - к исполнительному з 0 устройству управляемого объекта 3 .Применение таких систем весьма эфктивно для управления сложными процессами, когда решение задачи оптимальвого управления классическими методами ФФ затруднено (существенно нелинейные объек-, ты, неквадратичные критерии качестваи пр.), что. как раз имеет место "при управлении судном по траектории в режиме маневрирования курсом и скоростью по 40заданной програ мме геолого-геофизических работ. Однако указанные системы не могут быть применены для точного управления судном в режиме маневрирования по заданной траектории с заданной скоростью,д 5 поскольку в известных системах осущест" вляется либо непосредственное сравнение экстраполируемых характеристик управляемого процесса с заданными желаемыми характеристиками, либо критерий качества р вычисляется как функция управляющих воздействий в результате экстраполяции процесса управления, что не позволяет в задаче управления судном при маневрировании курсом и скоростью по заданной 55 сложной траектории обеспечить сходимость и устойчивость управления, т.е. не позволяет обеспечить принципиальное ре 30 4шение задачи, так как для процесса ойтимизации при таком построении системы невозможно задать ни начальных условий, ни определить направления поиска оптимального управления. Кроме того, в таких системах не предусмотрена возможность вхождения в заданную траекторию в любой точке маршрута, возможность прерывания и возобновления процесса управления при необходимости решения другиХ задач маневрирования, не предусмотренных программой геолого-геофизических работ, а также обеспечивать работоспособность системы при возможных сбоях входной информации.Целью изобретения является повышение точности и надежности системы, а именно, создание системы точного управ ления движением судна при маневрировании по заданной траектории с заданной скоростью и обеспечение при этом возможности вхождения в заданную траекторию в любой точке маршрута,. прерывания и возобновления процесса управления при необходимости решения других задач маневрирования, а также обеспечение работо-. способности системы при возможных сбоях в канале информации о местоположении судна.Поставленная цель достигается тем, что система содержит последовательно соединенные первый блок памяти, синхронизатор, вычислительный блок, прог раммный блок и формирователь программной траектории, а также второй блок памяти, выход которого подключен к другому входу оптимизатора, выходы датчиков курса и скорости соединены со вторыми входами программного блока, третьи входы которого связаны со вторьэ. ми выходами синхронизатора, а выходыс третьими входами экстраполятора, причем выходы датчика координат судна соединены со вторыми входами синхронизатора и вычислительного блока, а выходы формирователя программной траектории подключены к другим входам блока сравнения.На фиг. 1 представлена функциональная схема системы, на фиг. 2 - геометрическая интерпретация процесса управлении судном по заданной траектории.Система (см. фиг. 1) включает датчик 1 координат ( Х,) судна в прямоугольной системе координат ( ХОЧ ), неподвижной относительно земли, датчик 2 курса Фсудна, датчик 3 скорости Ч судна, первый блок памяти 4,57177306 хранящий массив координат (Х д ) времени, обусловленных программой гео 1, 2, . заданной траектории, лого-геофизических работ, что позволяет Выходы Ху и /.; блока памяти 4 задавать также необходимую скорость соединены со входами синхронизатора 5, движения судна по заданной траектории. к другим входам которого, а также ко 5 Такимобразом в блоке памяти 4 формивходам вычислительного "блока 6 подклю- руется необходимая траектория 18 мачены выходы Х идатчика 1 коор- . неврирования с заданными изменениями динат местоположения судна. Выходы Ъ курса и скорости во времени 1 и в и синхронизатора 5, характеризующие пространстве координат Х, у . В координаты ближайшей точки на заданной 10 синхронизаторе 5, для данной зафиюи-траектории, соединены с программнымрованной позиции, т.е, на основании данблоком 7, к другим входам которого ных о местоположении судна в момент подключены выходы датчика 2 курса Чф времени относительно заданных координат судна, датчика 3 скоростисудна, ХЪ, , у 5 ( 1 =1 2й ), на кажа также выходы (0 и Хс синхро дом шагу управления вычисляется блиниэатора 5, характеризующие. массив жайшая на заданной траектории точка А синхронизированных координат заданной . с координатами:Х 1; Ч, и относительтраектории. Выходы 7 д (Т) и Фд(Т) прог но этой точкй А формируется массив раммного блока 7 соединены с формиро-" синхронизированных координ Х вателем 8 программной траектории и с 20 Ч( 1, 2Т) заданной траекэкстраполятором 9, к другим двум вхо- торин от точки А с координатами 1 Ч 4 дам которого подключены задатчик 10 до точки с координмами Х У за время Тт т за емя начальных условий и датчик 11 внешних где Т-отрезок времени, меньший отрезка возмущений. Выход Х,0 экстраполятора 9 времени движения по, всей заданной траеки выход Х, формирователя 8, а также 5 торин. На фиг. 2 показан участок 19 выход У экстраполятора 9 и выход траектории, синхронизированный относиформирователя 8 подключены к блоку тельно точки А. Процесс синхронизации сравнения 12. Выходы М и ЬЧ блока позволяет, во-первых, входить в задан сравнения 12 подключены к оптимизатору. ную траекторию в любой точке маршрута309 13, к другому входу которого подключен во-вторых, избегать непредвиденных выход Здор, второго блока памяти 14. сбоев в каналеинформации о местополо Выходй 9, и выход ЬЧ оптимизатора женин судна, и, в-третьих, прерывать про подключены к коммутатору,15. Пер- цесс управления по заданной траектории вые выходы коммутатора 15 подключеНы для решения других задач, не предусмоъ к экстраполятору 9, вторые выходыЬЧ, 55,ренных программой работ и возобновлять икоммутатора 15 подключены к испса- его Координаты )(Ч 4 точки А подаются нительному блоку 16 судна 17. в вычислительный блок 6, на другие входы которого от датчика 1 координат местоСистема работает следующим образом, положения вводятся координаты Х, т При управлении судном в режиме маневри В вычислительном блоке 6 определяются рования по заданной траектории с задан- отклонения с Хд: координ т Х ной скоростью на каждом шагу решенияот координат Х 1 нн йзаданно задачи управления с помощью датчика 1 траектории. Эти отклонения вводятся в определяются координаты Х, ч место программный блок 7, на другие входы положения судна в прямоугольной системе которого вводятся значения курса45координат ( ХОУ ), неподвижной отно от датчика 2, значения скорости Ч от сительно земли и связанной с траектори датчика 3, а также поступает массив ей движения. Кроме того, с помощью дат синхронизированных координат ,0 чика 2 курса и датчика 3 скорости, опре от синхронизатора 5. Программный блок,деляются текущие значении курса Ф и в зависимости от величин и знаков от50,скорости Ч . Значения координат Х, клонений ЬХ и 4, а также вс датчика 1 вводятся в синхронизатор зависимости от величины 9 и Ч 5, на другие входы которого из блока формирует программные значения курса памяти 4 подается массив координат Чи скорости ЧП (Т) на время Т ХЯ у Ч 51 (1 =1, 2б ) заданной для выведения судна на заданную траек 55траектории (см. фиг. 2). Причем коорди- торию или для движения по заданной наты этого массива задаются для опре- траектории. Программные значения Чв(Т) деленных равных между собой моментов и "п(Т) вводятся в экстраполятор 9 и в30 8зйачения критерия больше допустимого ,23 оп, то в оптимизаторе 13 в зависимости от величины и знака осуществляется поиск новых значений управляющих сигналов по курсу и скорости, которые йосредством коммутатора 15 подаются в экстраполятор 9, где вновь, уже для этих новых значений уп равляюших сигналов, осуществляется экстраполяция новой траектории движения. Таким образом цикл экстраполяции в ускоренном масштабе времени повторяется. Если следующее значение критерйя качества 3, вычисленное в опти мизаторе 13, удовлетворяет условию 36 3 , то найденные таким образом управляющиесигналы по курсу Ть и скоростиявляются оптимальными и посредством коммутатора 15 подаются на исполнительный блок, 16. которыйР осуществляет регулировку курса и скорос ти в соотвегствии с управляющими сигналамии М . В следующей эафиксированной позиции весь цикл управления повторяется.Применение предлагаемой автоматической системы управления движением судна позволяет добиться"высокой точнос ти и устойчивости управленйя судном по заданной траектории с заданной скоростью эа счет органиэации управлении одное временнопо двум контурам (скорости и курса) в единой системе управления. Система управления движением судна, содержащая датчики курса, скорости и координат судна, экстраполятор, первые входы которого связаны с выходами датчика "внешйих возмущений и задатчика начальньй условий, а выходы - с одними входами блока сравнения, выходы, кото рого через оптимизатор соединены с ком, мутатором, первые выходы которого подключейы ко вторым входам экстраполятора, а вторые выходы - к исполнительному блоку, о т л и ч а .ю щ а я с я тем, что; с целью повышения точности и надежности системы, она содержит последовательно соединенные первый блок памяти, синхронизатор, вычислительный блок, программный блок и формирователь программной трайстории, а также второй блок памяти, выход которого подключен к другому входу;оптимизатора, выходы датчиков курса и скорости соеди 7 7177формирователь 8, программной траектории 20 (см. фиг. 2) с массйвом координат М 01 Чп ( ) =1, 2Т) длявыведения на заданную траекторию.Кроме того, в экстраполятор 9, представ,ляющий собой нелинейную адекватнуюсамонастраивающуюся мощць судна,подаются с задатчика 1 О начальные условия, характеризующие гидроаэродинамические характйристики конкретного 10типа судна,.ис датчика 11 внешйиевозмущения, характеризующие скоростьи направление ветра, скорость и направление течения, глубину под килем, волнение моря. Таким образом найденные зючения фп(Т) и Ч(Т) являются.конкретными начальйыми управляющими воздействиями для экстраполятора 9, которыйдля этих начальных условий Гэи извесъффных значениях возмущающих воздействий, 20с учетом гидроаэродинамических характержтик судна и гидродинамических сил.действующих на руль, вырабатываетадекватную реальному судну экстра- .полированную траекторию 21 с координатами ХвЧз ( =1 2 " Т)Координаты Ъ з экстраполированнойтраектории сравнивают в блоке сравнения 12 с координатами Мп программнойтраектории, а координаты Чэкстрапо- З 0лированной траектории сравниваются вблоке сравнения 12 с координатами Ч 0программной траектории, Причем сравнениеосуществляется только на участке 22заданной траекториина котором эаканчивается переходный процесс прогнозируемого движении (см. фиг. 2), что позволяет, во-первых, исключить из рассмотрения вспомогательный участок программнойтраектории, обеспечивающий выход на 40:задайй 6 траекторию ипй юрректирующий движение, и, во-вторых, организоватьцеленаправленность поискаоптймальныхуправляющих воздействий в оптияизаторе 13, в который вводятся результаты 45сравнения ЬЧ и Ь,Я . Кроме того, вопгимизатор 13 блоком памяти 14 вво"дится максимально допустимая мераошибки, т.е. максимально допустимаявеличина 1 п, критерия качестваЭ ггип так ЦьХ ) + (д)ч 1И Лгде= 1, 2Т номер точки натраектории; К - номер экстраполиро 55, ванной траектории для данной позиции,В оптимизаторе 13 вычисляютсязначения критерия качества .3 . Если формула изо бретения. Ужгород, ул. Проектная,9717730 10вены со вторыми входами программного1. Патент США Ж 3670227,блока, третьи входы которого связаны бо кл. Я 05 Ъ 1/00, оиублик, 1972.вторыми выходами синхронизатора, а вы, Красовский А. А. Системы автоходы - с третьими входами акстраполятора, матического управления полетом и ихпричем выходы датчика координат судна;аналитическое конструирование. М.,соединены са вторыми входами синхро- фНаукаф, 1973.низатора и вычислительного блока, а выходы формирователя программной тра. Александровский Н. М., Егоров С. В.,ектории подключены к другим входам Кузин Р. Е. Адаптивные системы автоблока сравнении. 10 матичесБОго управления сложными технофИсточникм информации, логическими процессами. М., фЭнергиаф,принятые. во внимание при экспертизе 1973.
СмотретьЗаявка
2565577, 05.01.1978
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
КАРПОВИЧ ИГОРЬ АНАТОЛЬЕВИЧ, КУДРЯШОВ ВЛАДИМИР ЕВГЕНЬЕВИЧ, ЛЕОНТЬЕВ ГЕОРГИЙ ДМИТРИЕВИЧ, НЕЧАЕВ ВИКТОР АНАТОЛЬЕВИЧ, ФРЕЙДЗОН ИСААК РУБИНОВИЧ
МПК / Метки
МПК: G05D 1/00
Опубликовано: 25.02.1980
Код ссылки
<a href="https://patents.su/5-717730-sistema-upravleniya-dvizheniem-sudna.html" target="_blank" rel="follow" title="База патентов СССР">Система управления движением судна</a>
Система для динамической стабилизации судна

Номер патента: 878646
Опубликовано: 07.11.1981
Авторы: Голубев, Ляпин, Печатников
МПК: B63B 39/00
Метки: динамической, стабилизации, судна
...курса подключенк блоку сравнения 1,1,Два выхода преобразователя координат7 подключены к блокам сравнения 12, 13 иодновременно к дифференцирующим блокам 14, 15.Выходы блоков сравнения 12, 13 подключены ко второму и третьему входампреобразователя координат 8. Выходы дифференцирующих блоков 14, 15 подключены ко второму и третьему входам преобразователя координат 9.Выходы датчика 3 обратной связи, преобразователей координат 8, 9 дифференцирующего блока 10 и блока сравнения 1.1подключены ко входам счетно-решающегоблока 16Входы блока управления 17 связаны свыходами блока 1 б, а выход их подключенко входу датчика 3 обратной связи,Система работает следующим образом,Поступающие от датчика 1 сигналы ли.чейных координат положения судна,...
Импульсный спектрометр ядерного магнитного резонанса для измерения времени спин-решеточной релаксации во вращающейся системе координат

Номер патента: 920483
Опубликовано: 15.04.1982
Авторы: Бабкин, Гуткин, Русанов
МПК: G01N 24/10
Метки: вращающейся, времени, импульсный, координат, магнитного, резонанса, релаксации, системе, спектрометр, спин-решеточной, ядерного
...своим входом подключен к выходупервого радиочастотного клапана. 3,а выходом - к первому входу сумматора 6, второй вход которого соеди 40нен с выходом второго радиочастотного клапана 4, а выход соединен совходом усилителя мощности 7. Второйвыход устройства управления 8 подключен к управляющему входу второгорадиочастотного клапана 4, а первый4 Явыход связан с управляющим входомпервого радиочастотного клапана 3и со входом Формирователя импульсов9, выход которого соединен со входом регулятора видеоимпульса 10.5 О Выход регулятора видеоиипульса 10подключен к управляющему входу усилителя мощности 7, а вход датчика11 связан с выходом усилителя мощ- фности 7 и со входом приемника 12.И . Устройство работает следующимобразом.Сигнал высокой,...
Устройство для задания угла в системах числового программного управления станками

Номер патента: 1495747
Опубликовано: 23.07.1989
Автор: Кошкин
МПК: G05B 19/18
Метки: задания, программного, системах, станками, угла, числового
...моменту угловая константа Лзо, соответствующая числу импульсов аргумента, необходимых для поворота радиус-вектора К на 90 , вычислена и запомнена в счетчике 4. На1 О 5 20 25 30 35 40 45 50 55 ЭоЩ = /2 2 =1 2 49тех пор, пока с выходя первой координаты линейного интерполятора 6 навход счетчика 5 не поступит количество импульсов, равное заданному углу поворота ц . При этом на выходесчетчика 5,появляется импульс, который сбрасывает в ноль триггер 8. Элемент И 13 закрывается и прохождениеимпульсов генератора 9 на вход интерполятора 6 прекращается. Поворотвектора К на заданный угол у закончен. При этом в счетчиках 2 и 3 оказываются искомые координаты точки А.Покажем, что вектор К повернулсяровно на заданньп угол у, Действительно, в первую...
Устройство для определения местоположения цели в системе координат летательного аппарата

Номер патента: 1840919
Опубликовано: 27.09.2014
Авторы: Бржевский, Навроцкая, Ярмилко
МПК: G01S 13/06
Метки: аппарата, координат, летательного, местоположения, системе, цели
Устройство для определения местоположения цели в системе координат летательного аппарата, содержащее последовательно соединенные радиолокатор, формирователь истинного пеленга и преобразователь координат, при этом второй выход радиолокатора соединен с вторым входом преобразователя координат, отличающееся тем, что, с целью повышения точности скрытного определения местоположения цели введены последовательно соединенные станция дальней разведки и точного пеленгования, анализатор амплитуды, комплексная навигационно-пилотажная астроинерционная система, азимутальный вычислитель, блок памяти, блок интерполяции и блок оптимизации режима пеленгования астроориентиров, при этом первый выход станции дальней разведки и точного пеленгования соединен с...
Система автоматического управления тепловым режимом блока регенеративных кристаллизаторов производства парафинов

Номер патента: 1181675
Опубликовано: 30.09.1985
Авторы: Ажогин, Бидюк, Демченко, Згуровский, Никифорова, Ренгач, Романенко, Шапиро
МПК: B01D 9/02, G05D 27/00
Метки: блока, кристаллизаторов, парафинов, производства, регенеративных, режимом, тепловым
...температур 17 содержит элементы умножения на постоянный коэйфициент 29, 30, 31 и 32, к входам которых подсоединены выходы элементов23, 24 и 25, а также выход триггера 22 соответственно, выходы которыхподсоединены к одному из входов блока 18 вычисления заданий регуляторам. Последний содержит сумматор 33,блок задержки на один такт 34 иблок вычитания 35, причем к входусумматора 33 подсоединен выход блока 17, а к второму входу - выходблока 34, к входу которого подсоединен выход сумматора 33. Кроме того,выход сумматора 33 подсоединенк одному из входом блока 35, к второ.му входу которого подсоединен выходдатчика 9, а выход блока 35 подсоединен к задающим входам регуляторов 12 и,13.Работа системы осуществляетсяследующим образом.Контуры...
Предыдущий патент: Устройство для контроля амплитудных и фазовых характеристик
Следующий патент: Устройство для регулирования положения объекта
Случайный патент: 155986