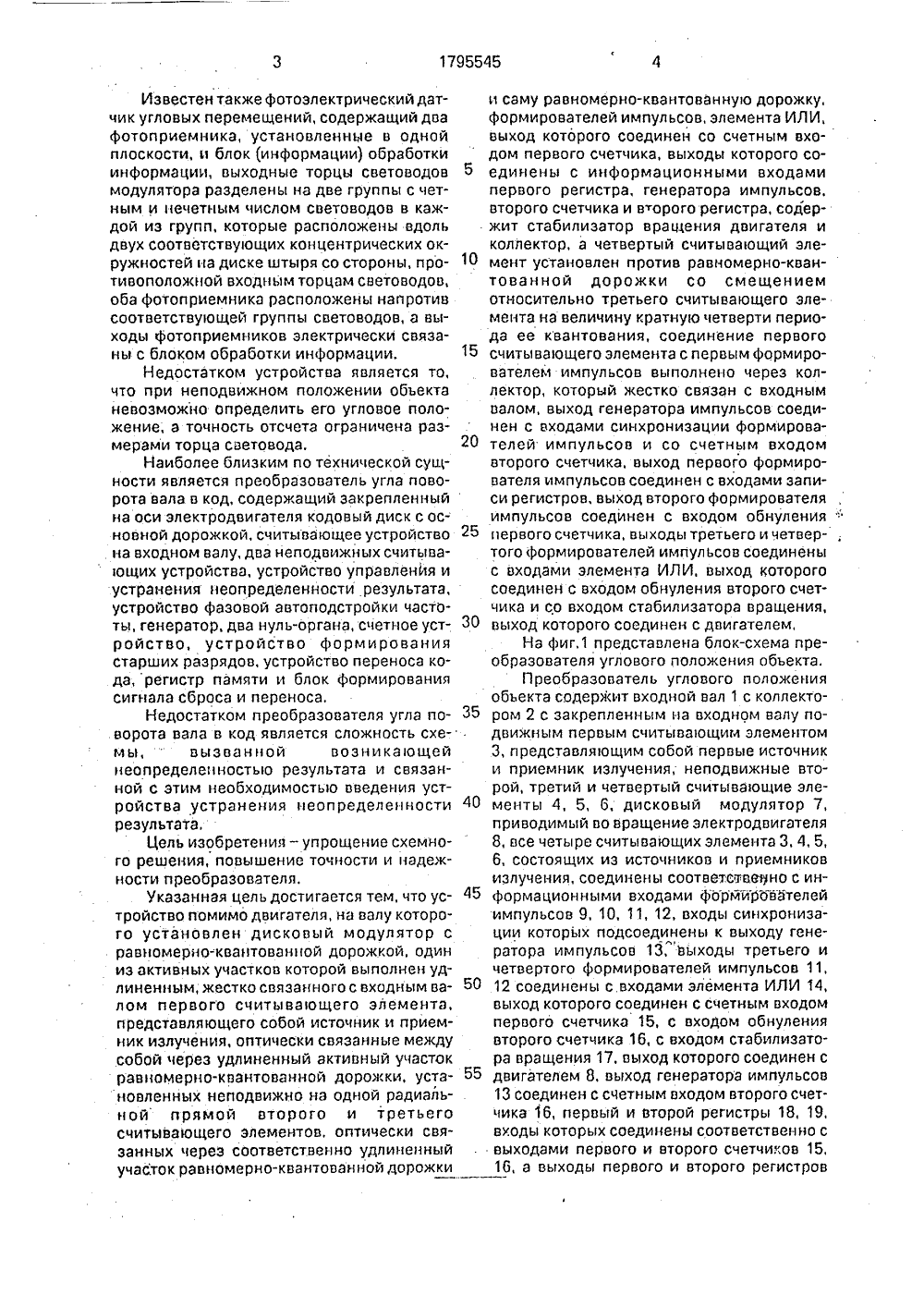
Преобразователь углового положения объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1795545
Автор: Гавриш



Текст
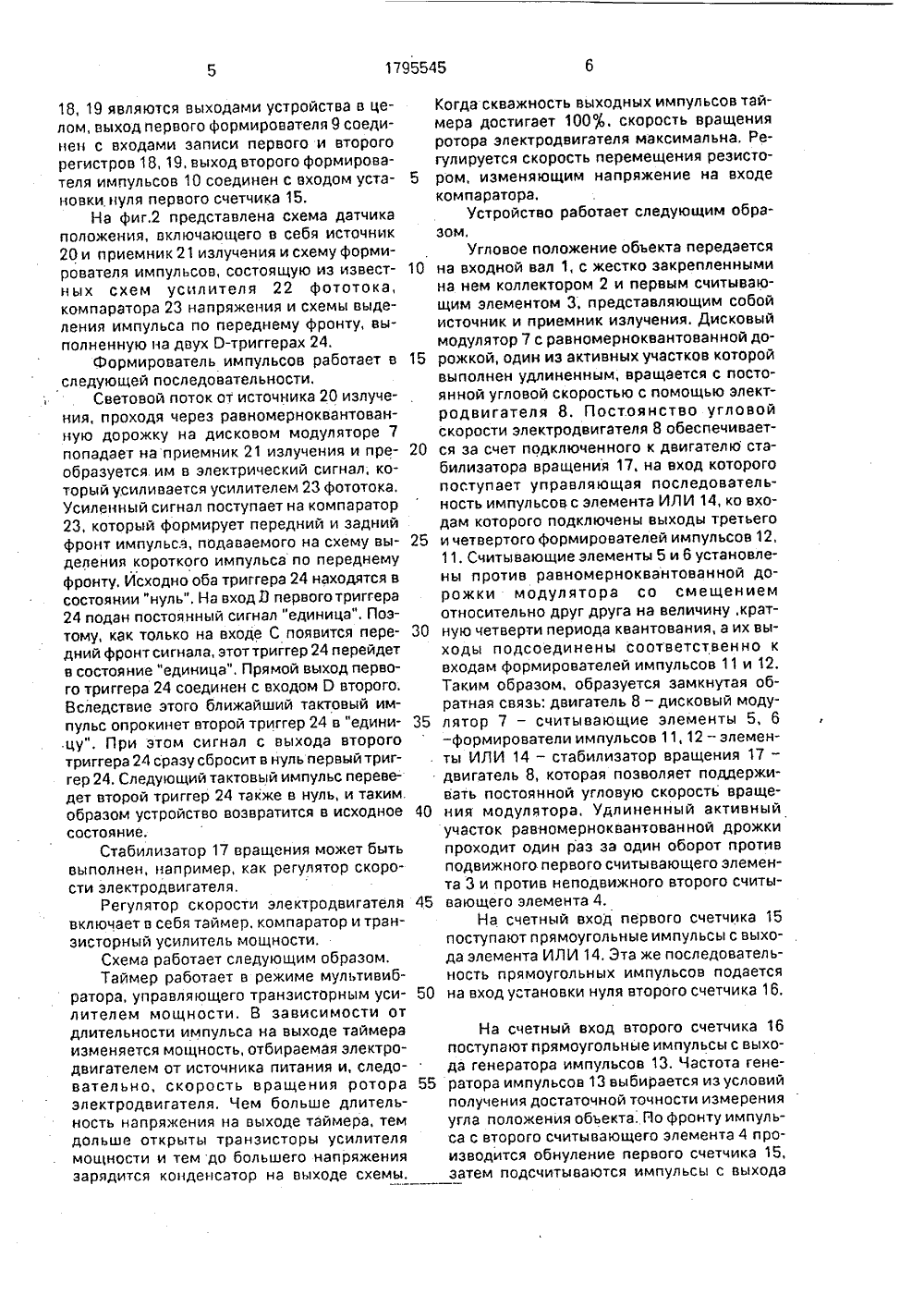
, 179554 03 М 1/24,1/50 ГОСУДАРСТВЕННОЕ ВЕДОМСТВО СССР (ГОСПАТЕНТ СССР) ТЕНТНО ПИСАН АВТОРСКОМУ ОБРЕТЕН ДЕТЕЛЬСТВ азующих отки иненный в ементов которых дом триг 1(56) Авторское свидетельство СССР М 551677, кл. Н 03 М 1/24, 1975.(54) ПРЕОБРАЗОВАТЕЛЬ УГЛОВОГО ПОЛОЖЕНИЙ ОБЪЕКТА(57) Изобретение относится к измерительной технике и может быть использовано в различных системах управления и контроля, напрймер, в станках с числовым программным управлением, в роботах и манипуляторах, в системах управления радио-и оптическими телескопами, в системах слежения и сопровождения, в навигаций и ориентации и т,подним словом, там, где необходимо определить положение обьекта в системе координат. Цель изобретения-упрощение и повышение точности и надежности преобразователя. Указанная цель Изобретение относится к измерительной технике и может быть использовано в различных системах управления и контроля, например, в станках с числовым программным управлением, в роботах и манипуляторах, в системах управления радио- и оптическими телескопами, в системах слежения и сопровождения, в навигации и ориентации и т.п., одним словом там, где необходимо определить положение обьекта в системе координат.Известен преобразователь углового перемещения обьекта, содержащий модулятор, закрепляемый на оси вращения обьекта, два осветителя и два фоточувствительных элемента. установленных попарно достигается тем, что в преобразователь, содержащий двигатель 8, на валу которого установлен дисковый модулятор 7 с равномерно-квантованной дорожкой, один из активных участков которой выполнен удлиненным, жестко связанный с входным валом первый считывающий элемент 3, установленные неподвижно на одной радиальной прямой второй 4 и третий 5 считывающие элементы, четвертый 6 считывающий элемент, формирователи 9-12 импульсов, элемент ИЛИ 14, первый счетчик 15, первый регистр 18, генератор 19 импульсов, второй счетчик 16 и второй регистр 19, введены стабилизатор 17 вращения двигателя и коллектор 2, а четвертый считывающий элемент 6установлен против равномерно-квантованной дорожки со смещениемотносительно третьего считывающего элемента 5 на величину, кратную четверти периода ее квантования, 2 ил. по обе стороны модулятора и обр два датчика положения, блок обраб формационных сигналов, выполн виде элемента НЕ, триггера, двух эл И, управляющий вход каждого из соединен с соответствующим выхо гера,Недостатком устроиства является то, что в условиях частых остановок может оказаться в неустойчивом положении датчик положения и при воздействии вибрации, неизбежной в производственных условиях, могут быть сформированы ложные импульсы на выходе устройства, Кроме того, устройство не позволяет учитывать реверс направления вращения обьекта.Известен также фотоэлектрический датчик угловых перемещений, содержащий два фотоприемника, установленные в одной плоскости, и блок (информации) обработки информации, выходные торцы световодов модулятора разделены на две группы с четным и нечетным числом световодов в каждой из групп, которые расположены вдоль двух соответствующих концентрических окружностей на диске штыря со стороны, противоположной входным торцам световодов, оба фотоприемника расположены напротив соответствующей группы световодов, а выходы фотоприемников электрически связаны с блоком обработки информации,Недостатком устройства является то, что при неподвижном положении обьекта невозможно определить его угловое положение; а точность отсчета ограничена размерами торца световода,5 10 15 20 Наиболее близким по технической сущности является преобразователь угла поворота вала в код, содержащий закрепленный на оси электродвигателя кодовый диск с основной дорожкой, считывающее устройство 25 на входном валу, два неподвижных считывающих устройства, устройство управления и устранения неопределенности результата, устройство фазовой автоподстройки частоты, генератор, два нуль-органа, счетное уст ройство, устройство формирования старших разрядов, устройство переноса кода, регистр памяти и блок формирования сигнала сброса и переноса.Недостатком преобразователя угла по ворота вала в код является сложность схемы, вызванной возникающей неопределенностью результата и связанной с этим необходимостью введения устройства устранения неопределенности 40 результата.Цель изобретенич - упрощение схемного решения, повышение точности и надежности преобразователя.Указанная цель достигается тем, что ус тройство помимо двигателя, на валу которого установлен дисковый модулятор с равномерно-квантованной дорожкой, один из активных участков которой выполнен удлиненным, жестко связанного с входным ва лом первого считывающего элемента, представляющего собой источник и приемник излучения, оптически связанные между собой через удлиненный активный участок равномерно-квантованной дорожки, уста новленных неподвижно на одной радиальной прямой второго и третьего считывающего элементов, оптически связанных через соответственно удлиненный участок равномерно-квантован ной дорожки и саму равномерно-квантованную дорожку, формирователей импульсов, элемента ИЛИ, выход которого соединен со счетным входом первого счетчика, выходы которого соединены с информационными входами первого регистра, генератора импульсов. второго счетчика и всрого регистра, содержит стабилизатор вращения двигателя и коллектор, а четвертый считывающий элемент установлен против равномерно-квантован ной дорожки со смещением относительно третьего считывающего элемента на величину кратную четверти периода ее квантования, соединение первого считывающего элемента с первым формирователем импульсов выполнено через коллектор, который жестко связан с входным валом, выход генератора импульсов соединен с входами синхронизации формирователей импульсов и со счетным входом второго счетчика, выход первого формирователя импульсов соединен с входами записи регистров, выход второго формирователя импульсов соединен с входом обнуления первого счетчика, выходы третьего и четвер-, того формирователей импульсов соединены с входами элемента ИЛИ, выход которого соединен с входом обнуления второго счетчика и со входом стабилизатора вращения, выход которого соединен с двигателем,На фиг.1 представлена блок-схема преобразователя углового положения объекта.Преобразователь углового положения объекта содержит входной вал 1 с коллектором 2 с закрепленным на входном валу подвижным первым считывающим элементом 3, представляющим собой первые источник и приемник излучения, неподвижные второй, третий и четвертый считывающие элементы 4, 5, 6, дисковый модулятор 7, приводимый во вращение электродвигателя 8, все четыре считывающих элемента 3, 4, 5, 6, состоящих из источников и приемников излучения, соединены соответственно с информационными входами форм"й 4 ователей импульсов 9, 10, 11, 12, входы синхронизации которых подсоединены к выходу генератора импульсов 13, выходы третьего и четвертого формирователей импульсов 11, 12 соединены с входами элемента ИЛИ 14, выход которого соединен с счетным входом первого счетчика 15, с входом обнуления второго счетчика 16, с входом стабилизатора вращения 17, выход которого соединен с двигателем 8, выход генератора импульсов 13 соединен с счетным входом второго счетчика16, первый и второй регистры 18, 19, входы которых соединены соответственно с выходами первого и второго счетчиков 15, 16, а выходы первого и второго регистров18, 19 являются выходами устройства в целом, выход первого формирователя 9 соединен с входами записи первого и второго регистров 18, 19, выход второго формирователя импульсов 10 соединен с входом установки нуля первого счетчика 15.На фиг.2 представлена схема датчика положения, включающего в себя источник 20 и приемник 21 излучения и схему формирователя импульсов, состоящую из известных схем усилителя 22 фототока, компаратора 23 напряжения и схемы выделения импульса по переднему фронту, выполненную на двух О-триггерах 24.Формирователь импульсов работает в следующей последовательности,Световой поток от источника 20 излучения, проходя через равномерноквантованную дорожку на дисковом модуляторе 7 попадает на приемник 21 излучения и преобразуется им в электрический сигнал, который усиливается усилителем 23 фототока. Усиленный сигнал поступает на компаратор 23, который формирует передний и задний фронт импульса, подаваемого на схему выделения короткого импульса по переднему фронту. Исходно оба триггера 24 находятся в состоянии "нуль". На вход О первого триггера 24 подан постоянный сигнал "единица". Поэтому, как только на входе С появится передний фронт сигнала, этот триггер 24 перейдет в состояние "единица", Прямой выход первого триггера 24 соединен с входом Р второго. Вследствие этого ближайший тактовый импульс опрокинет второй триггер 24 в "едини.цу", При этом сигнал с выхода второго триггера 24 сразу сбросит в нуль первый триггер 24. Следующий тактовый импульс переведет второй триггер 24 также в нуль, и таким. образом устройство возвратится в исходное состояние.Стабилизатор 17 вращения может быть выполнен, например, как регулятор скорости электродвигателя,Регулятор скорости электродвигателя включает в себя таймер, компаратор и транзисторный усилитель мощности.Схема работает следующим образом.Таймер работает в режиме мультивибратора. управляющего транзисторным усилителем мощности. В зависимости от длительности импульса на выходе таймера изменяется мощность, отбираемая электродвигателем от источника питания и, следовательно, скорость вращения ротора электродвигателя. Чем больше длительность напряжения на выходе таймера, тем дольше открыты транзисторы усилителя мощности и тем до большего напряжения зарядится конденсатор на выходе схемы.55 5 10 15 2025 30 3540 Когда скважность выходных импульсов таймера достигает 100;4. скорость вращения ротора электродвигателя максимальна, Регулируется скорость перемещения резистором, изменяющим напряжение на входе компаратора.Устройство работает следующим образом,Угловое положение объекта передается на входной вал 1, с жестко закрепленными на нем коллектором 2 и первым считывающим элементом 3; представляющим собой источник и приемник излучения. Дисковый модулятор 7 с равномерноквантованной дорожкой, один из активных участков которой выполнен удлиненным, вращается с постоянной угловой скоростью с помощью электродвигателя 8. Пост.оянство угловой скорости электродвигателя 8 обеспечивается за счет подключенного к двигателю стабилизатора вращения 17, на вход которого поступает управляющая последовательность импульсов с элемента ИЛИ 14, ко входам которого подключены выходы третьегои четвертого формирователей импульсов 12, 11, Считывающие элементы 5 и 6 установлены против равномерноквантованной дорожки модулятора со смещением относительно друг друга на величину, кратную четверти периода квантования, а их выходы подсоединены соответственно к входам формирователей импульсов 11 и 12. Таким образом, образуется замкнутая обратная связь: двигатель 8 - дисковый модулятор 7 - считывающие элементы 5, 6 - формирователи импульсов 11, 12 - элементы ИЛИ 14 - стабилизатор вращения 17 - двигатель 8, которая позволяет поддерживать постоянной угловую скорость вращения модулятора, Удлиненный активныйучасток равномерноквантован ной дрожки проходит один раз за один оборот против подвижного первого считывающего элемента 3 и против неподвижного второго считывающего элемента 4.На счетный вход первого счетчика 15 поступают прямоугольные импульсы с выхода элемента ИЛИ 14. Эта же последовательность прямоугольных импульсов подаетсяна вход установки нуля второго счетчика 16. На счетный вход второго счетчика 16 поступают прямоугольные импульсы с выхода генератора импульсов 13, Частота генератора импульсов 13 выбирается из условий получения достаточной точности измерения угла положения объекта. По фронту импульса с второго считывающего элемента 4 производится обнуление первого счетчика 15, затем подсчитываются импульсы с выхода1795545 элемента ИЛИ 14 от считывающих элементов 5 и 6, Эти же импульсы обнуляют каждый раз второй счетчик 16, на счетный вход которого поступают импульсы с генератора импульсов 13, По фронту импульсов с пер ного считывающего элемента 3 производится запись мгновенного состояния первого и второго счетчиков 15, 16, в выходные первый и второй регистры 18 и 19.Таким образом, на выходе первого и 10 второго регистров 18, 19 устанавливается за Формула изобретения Преобразователь углового положения объекта, содержащий двигатель, на валу которого установлен дисковый модулятор с равномерноквантованной дорожкой, один из активных участков который выполнен удлиненным, жестко связанный с входным валом первый считывающий элемент, установленный против удлиненного активного участка равномерноквантованной дорожки, установленные неподвижно на одной радиальной прямой второй и третий считывающие элементы, оптически связанные соответственно с удлиненным участком равномерноквантованной дорожки и с самой равномерноквантованной дорожкой, установленный неподвижно четвертый считывающий элемент, выходы считывающих элементов соединены с информационными входами одноименных формирователей импульсов, элемент ИЛИ, выход которого соединен со счетным входом первого счетчика. выходы которого соединены с информационными входами первого регистра, генератор импульсов, второй счетчик и второй регистр, о т л и ч а ю щ и й с я тем, что, с каждый оборот дискового модулятора 7 двоичный код, соответствующий угловому положению исследуемого объекта относительно установленной системы координат,Технико-экономическая эффективность предлагаемого устройства состоит в том, что по сравнению с базовым объектом, за который может быть принят прототип, реализация данного устройства позволяет повысить точность отсчета угла положения объекта при упрощении схемы и увеличении ее надежности. целью упрощения и повышения точности и надежности преобразователя, в него введены стабилизатор вращения и коллектор, а четвертый считывающий элемент установлен против равномерноквантованной дорожки со смещением относительно третьего считывающего элемента на величину, кратную четверти периода ее квантования, соединение первого считывающего элемента с одноименным формирователем импульсов выполнено через коллектор, который жестко связан с входным валом, выход генератора импульсов соединен с входами синхронизации формирователей импульсов и со счет- ным входом второго счетчика, выходы которого соединены с информационными входами второго роегистра, выход пЕрвого формирователя импульсов соединен с управляющими входами регистров, выход второго формирователя импульсов соединен с входом обнуления первого счетчика, выходы третьего и четвертого формирователей импульсов соединены с входами элемента ИЛИ, выход которого соединен с входом обнуления второго счетчика и с входом стабилизатора вращения, выход которого соединен с двигателем,РетоР Н.Слободян актор В,Трубчен роизводственно-издательский комбинат "Патент", г, Ужгород, ул.Гага Заказ 435 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СС 113035, Москва. Ж, Раушская наб., 4/5
СмотретьЗаявка
4852265, 19.07.1990
Р. И. Гавриш
ГАВРИШ РУСЛАН ИВАНОВИЧ
МПК / Метки
Метки: объекта, положения, углового
Опубликовано: 15.02.1993
Код ссылки
<a href="https://patents.su/5-1795545-preobrazovatel-uglovogo-polozheniya-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь углового положения объекта</a>
Счетчик импульсов на потенциальных элементах

Номер патента: 1040609
Опубликовано: 07.09.1983
Авторы: Вольфовский, Малеев, Трофимов
МПК: H03K 23/02
Метки: импульсов, потенциальных, счетчик, элементах
...выходами вспомогательного триггера, каждый дополнительный вход каждого элемента И первой группы соединен с дополнительным входом соответствующегоэлемента И второй группы и с прямымвыходом вспомогательного триггерасоответствующего младшего разрядаиз второй части младших Разрядов,Кроме того, счетчик импульсов напотенциальных элементах в каждомстаршем разряде основной триггер содержит первую группу элементов переклю.чения по количеству входов установкив единицу основного триггера и втоРую гРуппу элементов переключения по количеству входов установки в ноль основного триггера, входы установки в единицу и в ноль которого соединены с первыми входами элементов переключения соответственно первой и второй групп, выход каждого элемента...
Резервированный счетчик импульсов

Номер патента: 982197
Опубликовано: 15.12.1982
МПК: H03K 21/34
Метки: импульсов, резервированный, счетчик
...элементов 9=1 и 9=2, прямые выходы которых соединены соответственно с тактовым входом триггера 8=2 и с выходоми соединены соответственно с вторыми входами элементов 11=1, 11=2 И, выходы которых соединень 1 соответственно с входами установки в единицу триггеров 8=1 и 8=2; выход 5 канала 1=1 соединен с входами 6 каналов 1=2, 1=3, входь 1 14 которых соединены с выходом 13 канала 1=1; выход 5 канала 1=2 соединен с входом 6 канала 1=1 и с входом 7 канала 1=3, выход 5 которого соединен с входом 7 канала 1=2 и с входом 7 канала 1=1, вход которого 14 соединен с входом 15 канала 1=3 и с выходом 13 канала 1=2, вход 15 которого соединен с входом 15 канала 1=1 и с выходом 13 канала 1=3. Работа резервированного сцетцика импульсов происходит...
Устройство для контроля исправности элементов при их параллельно-последовательном соединении в высоковольтном электротехническом оборудовании

Номер патента: 1069088
Опубликовано: 23.01.1984
Авторы: Жданов, Иванова, Шарлот
МПК: H02M 1/18
Метки: высоковольтном, исправности, оборудовании, параллельно-последовательном, соединении, электротехническом, элементов
...подключен к одному входу блока выдачи результата, другой вход которого подключен к выходу формирователя импульсов, входом подключенного к выходу и вхо ду обнуления счетчика на фтри, выходу элемента И и входу второго элемента задержки, выход которого подключен к разрешакщему входу блока памяти, первый и второй световоды 45 подключены между первыми светоизлучателем и фотоприемником и вторыми светоизлучателем и Фотоприемником соответственно, поразрядные входы блока памяти подключены к соответствукщим поразрядным выходам дешифратора.На фиг. 1 представлена схема устройства для контроля исправности элементов при их параллельно-последовательном соединении в высоковольтком электротехническом оборудовании. Устройство содержит датчики 1...
Счетчик импульсов для семисегментных индикаторов
Номер патента: 1580550
Опубликовано: 23.07.1990
Автор: Базалев
МПК: H03K 23/48
Метки: импульсов, индикаторов, семисегментных, счетчик
...уровень логической едини-цы, так как они не светятся,Триггеры 1-4 с элементом И 5 образуют делитель частоты на 12, а элементы 6-25 образуют дешифратор для последовательного включения (можно через соответствующий формирователь)элементов семисегментного индикатора.Триггеры реагируют на изменения так"товых импульсов со значения ТИ=1 наТИ=О, 5 58В исходное состояние все триггеры 1"4 приводятся сигналом "Сброс", поступающим в виде импульса по шине 27, при этом Ц = О, Я= О, 0= О, О 0 диаграммы на фиг.2 приО),Пользуясь логическими уравнениями для Е" и К-входов триггеров, определим их состояния: Е 1= 1, К= 1,Е О, К = 1, Е = 1, Кз= О, Е= О,К= О, а по логическим уравнениям выходов дешифратора определим состояния выходов а,Ь,с,д,е,Е,п: а,= 1,Ь...
Устройство для определения распределения срабатывания исполнительных элементов иерархических систем управления
Номер патента: 640306
Опубликовано: 30.12.1978
Автор: Червяцов
МПК: G06F 15/173, G06F 17/00
Метки: иерархических, исполнительных, распределения, систем, срабатывания, элементов
...являются запрещающими. Сигналы с элементов 17 проходят на входы счетчика 5. Выходной сигнал счетчика 5 через схему 20 воздействует на коммутатор 11, подготавливая его для ввода числа в соответствующий счетчик блока 8.Одновременно выходные сигналы счетчиков 4, 3 поступают на входы счетчиков 6, 7 и через дешифраторы 13, 14 в блок 19, Выбранное число передается из блока 19 через подготовленный коммутатор 11 в соответствующий счетчик блока 8. На этом такт работы устройства заканчивается,В случае появления на выходе генератора 1 второго импульса этот импульс поступает лишь на триггеры счетчика 1, так как 5 10 1 20 25 ЗО 35 40 45 50 55 60 65 элемент И 21 закрыт. Все дальнейшие процессы в устройстве проходят аналогично и заканчиваются вводом...
Предыдущий патент: Преобразователь угловой скорости вала в код
Следующий патент: Устройство для преобразования перемещения объекта в код
Случайный патент: Способ получения камфена