Интерполятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
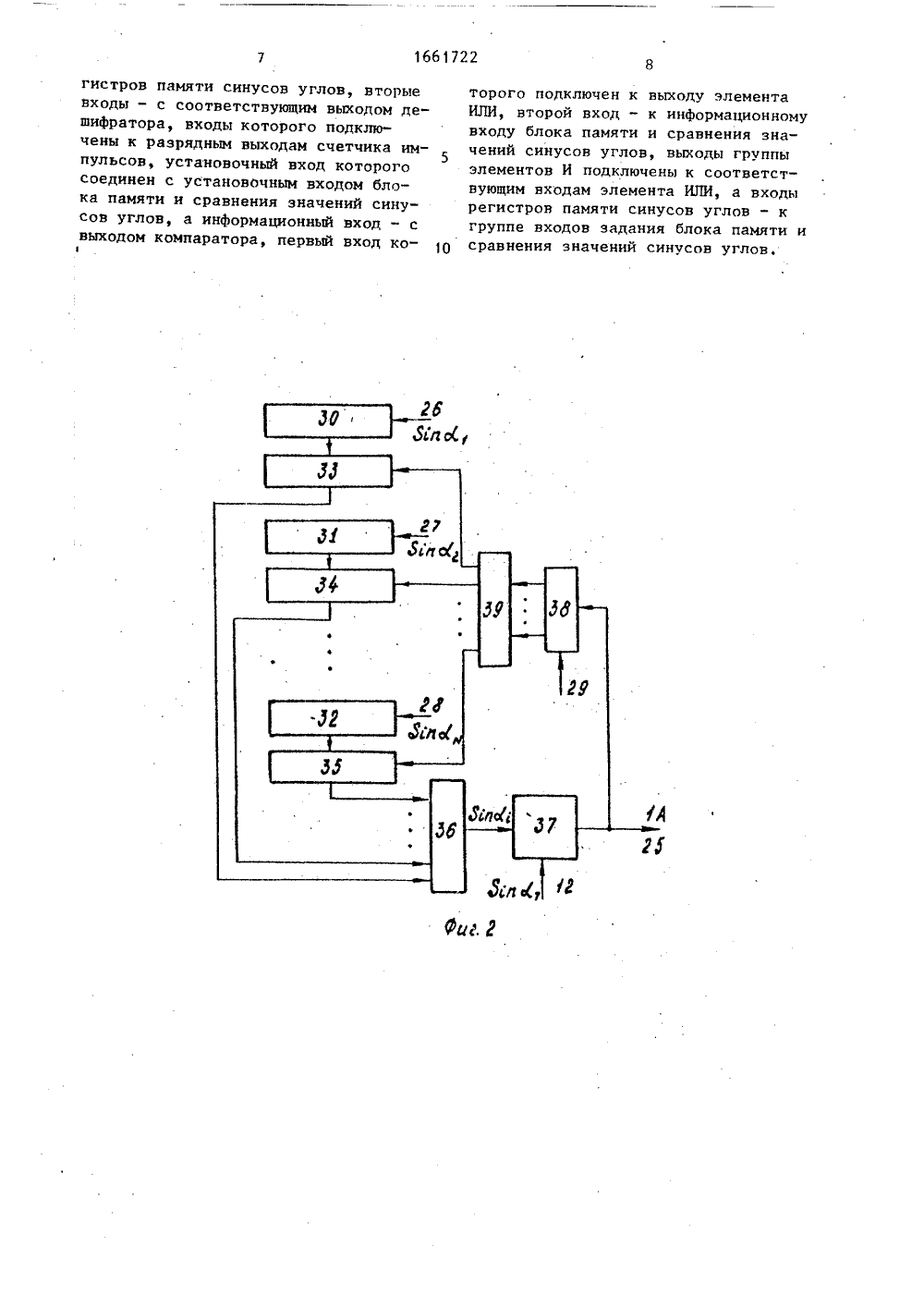
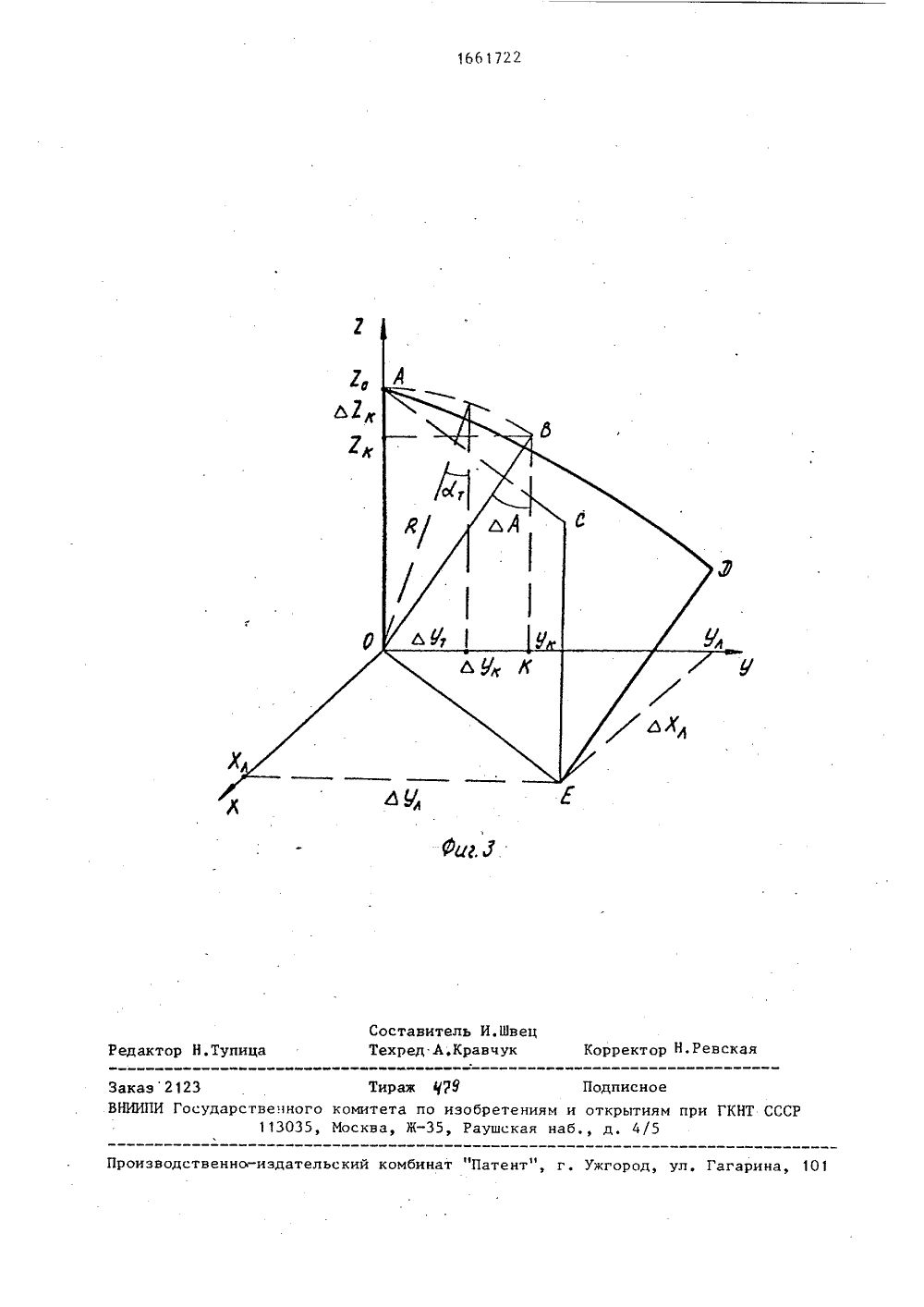
/4 ИСАНИЕ ИЗОБРЕТЕН нусов углов. Р р У углов блока 7 содержат значения с кусов угла поворота угловой коорд наты, которые сравниваются с сину сом текущего угла, поступающего накомпаратор, связанный через блок бделения импульсов и блок 5 счетчика.импульсов с выходом 23 блока 4 кругловой интерполяции. В момент превышения синусом текущего угла значениясинуса из запоминающего регистра компаратор выдает единичный импульс поугловой координате и подключает ксвоему входу следующее значение синуса угла из запоминающего регистра,Таким образом осуществляется управление положением оси инструмента вплоскости координат вместе с управлением конечной точкой оси инструмента, 3 ил.ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР А ВТОРСНОМУ СВИДЕТЕЛЬСТ(7 1) Ленинградский политехнический институт им.М.И.Калинина(56) Авторское свидетельство СССР У 1275375, кл. С 05 В 19/18, 1985.Авторское свидетельство СССР В 1238033, кл, С 05 В 19/18, 1984. (54) ИНТЕРПОЛЯТОР(57) Изобретение относится к автоматике и может быть использовано в системах числового программного управления многокоординатными станками С целью расширения области применения интерполятора в него введен блок 7 памяти и сравнения значений сиегист ы памяти син совИзобретение относится к автоматике и может быть использовано в системах числового программного управления многокоординатными станками, система координат которых содер 5 жит три координаты линейного перемещения и координату углового перемещения вокруг линейной оси.Цель изобретения - расширение области применения.На фиг. 1 представлена схема предлагаемого интерполятора; на фиг. 2 схема блока памяти и сравнения значений синусов углов; на фиг, 315 график, иллюстрирующий работу интерполятора.Интерполятор содержит блок 1 задания скорости, блок 2 линейной интерполяции, блок 3 линейно-круговой20 интерполяции, блок 4 круговой интерполяции, счетчик 5 импульсов, блок 6 деления импульсов, блок 7 памяти и значений синусов углов, выход 8 блока задания скорости, вход 9 блока ли нейно-круговой интерполяции, вход 10 блока круговой интерполяции, вход 11 блока деления импульсов, вход 12 блока памяти и сравнения значений синусов углов, входы 13-18 блока програм мы (не показан), установочный вход 19, вход 20, выходы 21-25 устройства, входы 25-28 устройства, установочный вход 29.Блок памяти и сравнения значений синусов содержит регистры 30-32 па 35 мяти синусов углов, элементы И 33-35, элементы ИЛИ 36, компаратор 37, счетчик 38 импульсов и дешифратор 39.Интерполятор работает следующим образом.В режиме ввода информации в блок линейно-круговой интерполяции вводятся координаты ДХи Ь У, соответствующее приращениям линейных координат управляемой точки А станка для движения по участку ОЕ конечной точки оси инструмента.В блок 4 круговой интерполяции вводятся координаты У и 2 , соответствующие начальным линейным кбординатам точки А при ее движении по закону круговой интерполяции относительно точки О в точку В, соответствующую конечному положению оси инструмента в плоскости 2 ОУ.55В блок 2 линейной интерполяции вводятся суммарные приращения точки А . ( Ь Х + Д УА), реализуемые линейно круговым, и ( ДУ + Д 2), реализуемые круговым интерполятором. Все триблока интерполяции работают по методу оценочной функцииВ блок 6 деления вводится величина К = АО. В блок 7 по входам 26-28вводятся последовательные значениясинусов углов ф;, лежащих в интервалеот 3 до/2 так, что О; - Ы.,где о - величина угла, отрабатывае"мого угловой координатой А при появлении единичного импульса 1 А на выходе 25 интерполятора. Количество регистров 30-32 памяти синусов углов,необходимых для ввода значений в 1 п Ы1определяется как И = п/2 оп,После ввода информации, когда инструмент находится в вертикальномположении, установочные сигналы 19и 29 обнуляют счетчики 5 и 38 им-.пульсов. При этом дешифратор 39 формирует сигнал на первом выходе, который, поступая на элемент И 33, осуществляет ввод значения з 1 п Оиз регистра 30 через элемент ИЛИ в компаратор 37В режиме работы блок 1 выдает импульсы задания скорости с частотойГ, Блок 2 линейной интерполяциираспределяет импульсы задания скорости между блоком 3 и блоком 4пропорционально суммарным приращениям координат в этих блоках, На выходе 9 .блока 2 формируются импульсыс частотой Гл, являющейся задающейдля блока 3, а на выходе 10 блока 2формируются импульсы с частотой ГК 1являющейся задающей для блока 4,При этом выполняются соотношения1 к+ Гк = ЕЪ и Ти/1 к = (Ьхл+ Дуб)/Блок 3 осуществляет интерполяцию участка АС, выдавая единичныеимпульсы 1 Х и 1 У. Блок 4 осуществляет интерполяцию по дуге АВ радиуса К, выдавая .импульсы 1 У и 12.Таким образом осуществляется необходимое перемещение точки управления иэ точки А в точку П, не изменяющее первоначальную (вертикальную) ориентацию оси инструмента впространстве. Для переориентации оси инструмента в заданное положение необходимо осуществить поворот оси инструмента относительно точки управ 5 16ления в плоскости ЕОУ на угол ДАОВК, где ВК 1 ОУ - начальная ориентт ация оси инструмента, ОВ 1 ПЕконечная ориентация оси инструмента. Наличие блока 7 памяти и сравнения значений синусов углов позволяет осуществлять данный поворотоси инструмента в процессе отработки круговой интерполяции, используяфакт совпадения текущего положениярадиуса круговой, интерполяции К снеобходимым текущим положением осиинструмента в пространстве.Управление угловой координатой Аосуществляется следующим образом.В режиме круговой интерполяции импульсы с выхода 23 блока 4 поступают на вход счетчика 5 импульсов,формируя на его выходе текущий кодДУ . Блок 6 осуществляет делениеУ т на величину Р. Таким образ омпо входу 12 на компартор 3 блока 7поступает величина У (К = япМ ,где Кт - текущий угол между радиусом круговой интерполяции и вертикальной осью Е.В компараторе 3 происходит сравнение величин яп О( и яп 0,. Таккак значение Д У постоянно возтрастает, то в некоторый момент величина яп 0( превысит ядп 0 .При этом на выходе компаратора сформируется единичный импульс 1 А, который осуществляет поворот оси инструмента на величину 3 . Этот же импульс поступает на вход счетчика 38и через дешифратор 39 подключает значение ядп 0 к входу компаратора. Далее процесс повторяется,В результате отработки приращений по координатным Х, У и Е точка Аперемещается по сложной траектории вточку О. Приращение Д А обеспечиваетсоответствие конца оси инструментаточке Е.Участок ОЕ на плоскости ХОУ можетбыть и дугой окружности. В этом случае блок 3 работает в режиме круговой интерполяции. При вводе данных внего заносятся координаты начальнойточки дуги, а в блок 2 - суммарныеприращения конечной точки дуги посоответствующим координатам.Эффективность интерполятора определяется совместной работой линейнокругового и кругового интерполятора,выход которого связан через счетчик иделитель импульсов с входом блока617226 эапоминающего устраиства и сравнения,Это позволяет управлять не только положением конечной точки оси инструмента, но и положением самой оси в координатной плоскости. Поэтому при отработке криволинейных поверхностейвозможна замена обработки торцовойчастью инструмента обработкой с использованием боковой поверхности инструмента. 510 Формула изобретения памяти синусов углов и группу элементов И, первые входы которых соединены с выходами соответствующих реИнтерполятор, содержащий блок задания скорости, выход которого соединен с первым информационным входомблока линейной интерполяции, второйи третий информационные входы которого соединены с первой группой входовзадания при 15 ащения интерполятора, апервый и второй вь ходы соответственнос первыми входами задания скорости блоков линейно-круговой интерпопяции икруговой интерполяции, вторые и третьи входы задания которых соединеныс второй и третьей группами входовзадания приращения и начальных координат интерполятора, первый выход блока круговой интерполяции соединен сосчетным входом счетчика импульсов,установочный вход которого подключенк первому установочному входу интерполятора, а выход - к первому информационному входу делителя импульсов,второй информационный вход которогосоединен с входом задания радиусаинтерполятора, первая и вторая группы выходов которого соединены соответственно с выходами блоков линейнокруговой и круговой интерполяции.о т л и ч а ю щ и й с я тем, что, сцелью расширения области применения,в него введен блок памяти и сравнения значений синусов углов инЭформационный вход которого соединенс выходом делителя импульсов, установочный вход - с вторым установочнымвходом интерполятора, группа входовзадания - с четвертой группой входовзадания синусов углов интерполятора,а выход - с выходом интерполятора,при этом блок памяти и сравнения значений синусов углов содержит компаратор, счетчик импульсов, дешифратор, элемент ИЛИ, группу регистровгистров памяти синусов углов, вторье входы - с соответствующим выходом дешифратора, входы которого подключены к разрядным выходам счетчика импульсов, установочный вход которого5 соединен с установочным входом блока памяти и сравнения значений синусов углов, а информационный вход - с 1выходом компаратора первый вход коУ 1 О торого подключен к выходу элементаИЛИ, второй вход - к информационномувходу блока памяти и сравнения значений синусов углов, выходы группыэлементов И подключены к соответствующим входам элемента ИЛИ, а входырегистров памяти синусов углов - кгруппе входов задания блока памяти исравнения значений синусов углов..Ревска дпис ственна-издательский комбинат "Патент", г. Ужгород, ул, Гагарина ои каз 2123 ТиНИИПИ Государственного комите113035, Москва по изобретениям Б, Раушская наткрытиям при ГКНТ СС д. 4/5
СмотретьЗаявка
4721752, 18.07.1989
ЛЕНИНГРАДСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. М. И. КАЛИНИНА
КОЛОСОВ ВЛАДИМИР ГРИГОРЬЕВИЧ, КОРОЛЕВ ВЯЧЕСЛАВ СЕМЕНОВИЧ, ТРЕТЬЯКОВ ВЛАДИМИР АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 19/4103
Метки: интерполятор
Опубликовано: 07.07.1991
Код ссылки
<a href="https://patents.su/5-1661722-interpolyator.html" target="_blank" rel="follow" title="База патентов СССР">Интерполятор</a>
Устройство для регулирования угла входа полосы в клети непрерывного прокатного стана

Номер патента: 1026871
Опубликовано: 07.07.1983
Авторы: Акишин, Зинченко, Мазур, Парсенюк
МПК: B21B 37/00
Метки: входа, клети, непрерывного, полосы, прокатного, стана, угла
...направляющих роликов 3, в систему 5 управления их приводом 4 при входе сварного шва (синхронно) в ту клеть, перед которой установлены указанные направляющие ролики 3. Блок 16 клети Г выполнен на базе двух операционных усилителей сумматора и инвертора, соединенных последовательно. К одному входу сумматора подсоединен источник опорного напряжения отрицательной полярности Оо, к другому - выход толщиномера, установленного перед первой клетью. Прямил выходом блоков 16 является выход сумматора, а инверсным - выход инвертора, Йапряжение О на прямом входе блока 16 первой клети пропорционально величине перемещения опор роликов и определяется из выражения И0=-(К ,) = 5=Ь Р (Ь ф К 1 р ) ( )где О - Опорное напряжение, велй чину которого...
Устройство для регулирования угла входа полосы в клеть непрерывного прокатного стана

Номер патента: 1219197
Опубликовано: 23.03.1986
Авторы: Девятко, Дмитренко, Зинченко, Парсенюк
МПК: B21B 37/00
Метки: входа, клеть, непрерывного, полосы, прокатного, стана, угла
...зоне индикации датчика,9, установленногоперед клетью, последний срабатывает и сигнал о наличии шва поступает в блок 17 управления, где форЗ 0 мируется время задержки 2,чЭгде Ь - расстояние от датчика 9 швадо клети, м;35ч - скорость прокатки, м/с,- среднее время отработкиперемещения Ь Б опор роликов для дополнительного измерения Ь угла входа полосы в клеть, с.После окончания ь на выходеблока 17 управления появляется сигнал логической единицы, который открывает ключ 12, через инвертор 15 45закрывает ключи 11 и сбрасывает внуль управляемый измеритель 13 перемещения.Одновременно блок 17 управления начинает формировать следующуювременную задержку о.50К блоку 5 управления приводом 4опоры роликов 3 вместо выхода блока 7 сравнения моментов...
Способ определения угла входа пули в преграду

Номер патента: 1751640
Опубликовано: 30.07.1992
Авторы: Бахтадзе, Гальцев, Леонтьев
МПК: F41J 5/00
Метки: входа, преграду, пули, угла
...считать ориентировочное определение угла входа пули в йреграду, 4 основанное на эмпирических выводах, но- (Я сящих в большей степени субъективный ха- а рактер.Цель изобретения - повышение точности определения угла входа пули в преграду,Поставленная цель достигается тем, что согласно способу определения угла входа пули в преграду, основанному на фиксации а входного пулевого повреждения с прилегающим к нему на наружной поверхности преграды поясками обтирания или осаднения, измеряют максимальную ширину поясков обтирания или осаднения через центр пулевого повреждения, измеряют расстояние от центра пулевого повреждения до видимых границ вытянутой части поясков обтирания1751640 Формула изобретенияСпособ определения угла входа пули впреграду,...
Устройство для вычисления синуса и косинуса суммы двух углов

Номер патента: 922788
Опубликовано: 23.04.1982
Автор: Палиенко
МПК: G06G 7/22
Метки: вычисления, двух, косинуса, синуса, суммы, углов
...усилитель 13, широтно-импульсный модулятор (ШИМ) 14, логический элемент эквивалентности 15, коммутатор 16, интегратор 17, нуль-орган 18, формирователь 19 импульсов, распределитель 20 импульсов, двухпозиционный переключатель 21.Устройство работает следующим образом.Преобразование производится за 6 тактов в течение шести полупериодов опорного напряжения Оо ,Производится формирование двух периодических последовательностей из четырех нходных сигналов О - О 4 , полученных от синусно-косинусных датчикови опорного сигнала по закону: 1, 2, О,2 - 1, О, 1и 3, 3, 3, 4, 41 4, 31путем поочередного интегрирования текуших значений сигналов в моменты времени, соответствующие экстремумам первой гармоники несущей частоты (и минимуму квадратурной...
Преобразователь кода угла в коды синуса и косинуса

Номер патента: 684554
Опубликовано: 05.09.1979
Автор: Киселев
МПК: G06F 15/34
Метки: кода, коды, косинуса, синуса, угла
...к выходам счетчика 6,у которого счетный вход и вход установки в нуль соединены соответственно стактовым входом и с одноименным входомвыходного сумматора 11 и подключены ктем пропускает на счетный вход счетчика 6 и тактовый вход сумматора 11 серию нмпульсоо, число которых равно, Я й Ф 1=Огде с- -6- номер участка вп 3=. О 1 2проксимации, опре- удепяемой пятью старшими разрядами ко 1да, причемможет принимать значения иэ ряда О, 1, 1 ф2, 31.Код старших раэрядов р, снимемый с коммутатора кодов 2, сравнивается с ф(1) текущим кодом счетчика 6 при помощи цифрового компаратора 4, 3При этом цифровой компаратор 4 вырабатывает логический сигнал Г таким обрвэом, что, если(Ц, то ГО, а если(О, то Г 1. С цифрового компаратора 4 сигнал Г...
Предыдущий патент: Устройство контроля и управления технологическим комплексом для намотки изделий
Следующий патент: Устройство для нанесения отделочного материала
Случайный патент: Способ получения галоидсодержащих а-оксиперекисей