Стенд для испытания двигателя вращательного движения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1615593
Авторы: Староверов, Троицкий, Штессель
Текст
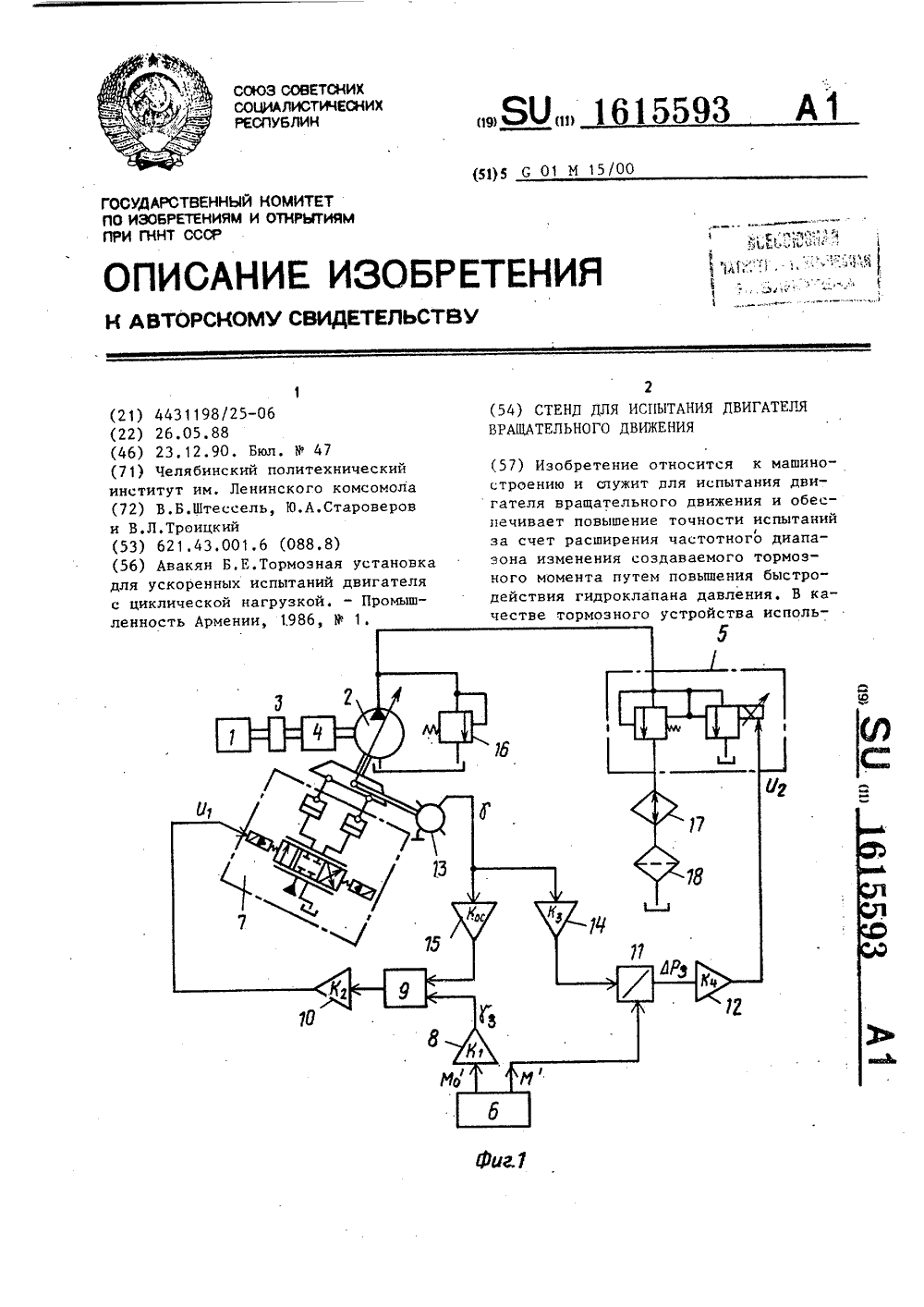
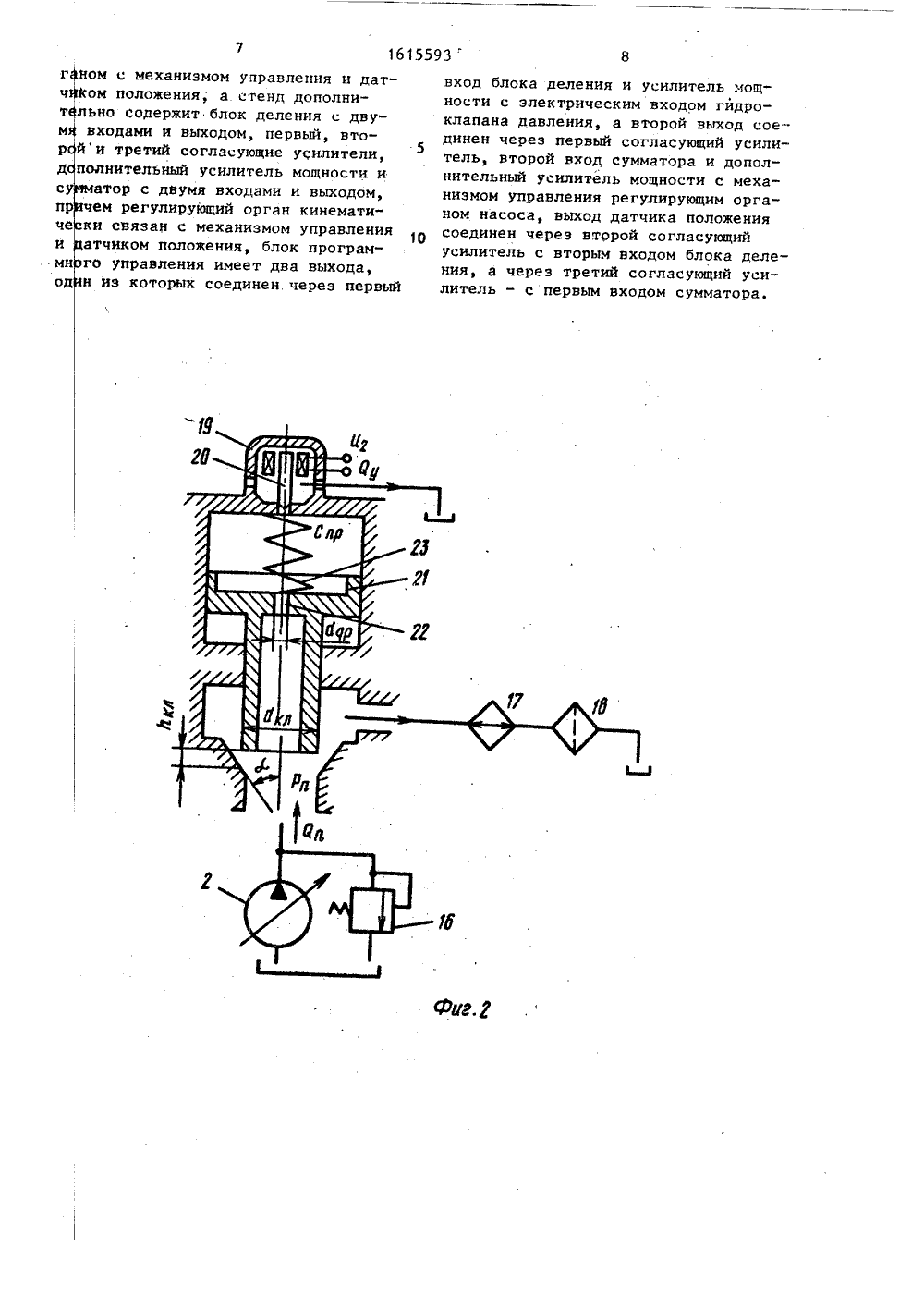
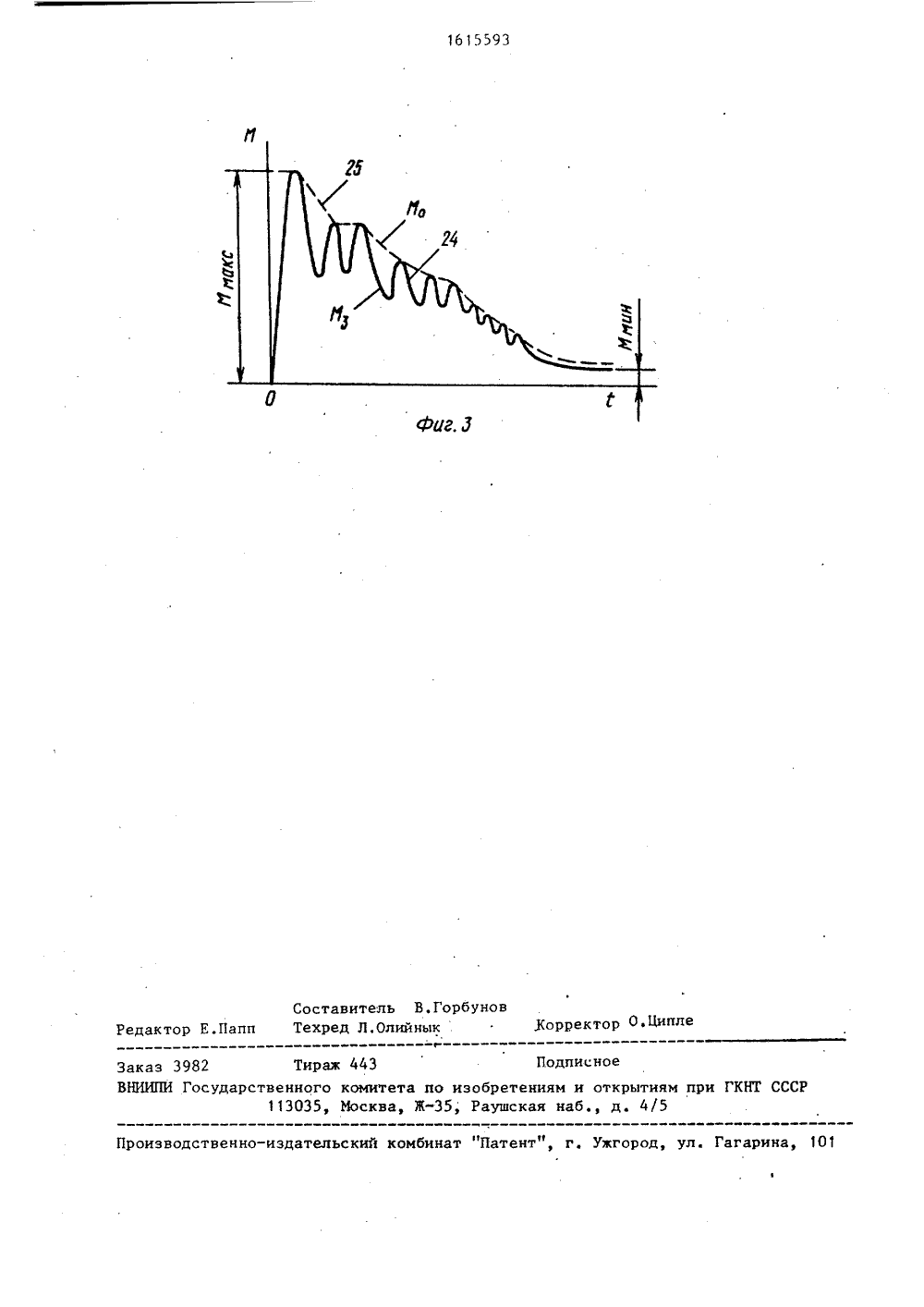
(5 ши я двии обеспытанийдиапастроениюгателя вр нст 72) чивае(53) (56) стро- В ка для с ц лен спол 1 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ГКНТ СССР ИЕ ИЗОБРЕ К АВТОРСКОМ 4431198/25-0626.05.8823,12,90. Бюл. У 47Челябинский политехническийтут им. Ленинского комсомолаВ.Б.Штессель, Ю.А,Староверов,Троицкий621.43.001.6 (088.8)Авакян Б.Е.Тормозная установкскоренных испытаний двигателялической нагрузкой, - Промышсть Армении, 1,986, У 1,тение относится к служит для испытан щательного движени овышение точности за счет расширения частотногозона изменения создаваемого тного момента путем повышениядействия гидроклапана давленичестве тормозного устройства1615593 эуют гидронасос 2, снабженный регулирующим органом, который кинематически соединен с механизмом управления (МУ) 7. МУ 7, в свою очередь,электрически соединен через дополнительный усилитель 10 мощности, сумматор 9 и первый согласующий усилитель8 с одним из выходов блока программного управления (БПУ) 6, другой выход которого через блок 11 деления,Изобретение относится к областимашиностроения и может быть использовано при стендовых испытанияхдвигателей вращательного движения,в частности двигателей внутреннего 20сгорания.Цель изобретения - повышение точности испытаний за счет расширениячастотного диапазона изменения создаваемого тормозного момента путем повышения быстродействия гидроклапана,давления,На фиг 1 представлена общая упрощенная схема стенда; на фиг.2 - схемагидроклапана; на фиг.З - график, иллюстрирующий закон изменения тормоз-ного момента на валу двигателя.Стенд (фиг.1) содержит испытуемыйдвигатель 1, регулируемый гидронасос2, датчик 3 крутящего момента, понижающий редуктор 4, гидроклапан 5давления, блок б программного управления, механизм 7 управления регистрирующего органа гидронасоса 2, первый согласующий усилитель 8, сумматор 9, дополнительный усилитель 10мощности, блок 11 деления, усилитель12 мощности, датчик 13 положения,второй согласующий усилитель 14, третий согласующий усилитель 15, предохранительный клапан 16, маслоохладитель 17 и фильтр 18. Гидроклапан 5давления (фиг,2) состоит из электромагнита 19, управляющего элемента20, золотника 2 1 с дросселем (калиброванным отверстием) 22 и пружиной23, прижимающей золотник 21 к седлу.Заданный тормозной момент 24 (фиг.З)и огибающий момент 25 заносятся вблок б программного управления в виде значений, отстоящих друг от другана заданный временной интервал,Вал испытуемого двигателя 1 соединен с валом гидронасоса 2 через усилитель 12 мощности соединен сгидроклапаном 5. Датчик 13 положениячерез второй 14 и третий 15 согласующие усилители соединен соответственно с вторыми входами блока 11 деления и сумматора 9. БПУ 6 позволяетразделить частотный диапазон изменения тормозного момента между гидроклапаном 5 и МУ 7 управления регулирующим органом гидронасоса 2. 3 ил. датчик 3 крутящего момента и понижающий редуктор 4. В напорной магистрали гидронасоса 2 установлен гидроклапан 5 давления. Блок 6 программного управления имеет два выхода. Один выход соединен с электрическим входом механизма 7 управления регули- . рующего органа гидронасоса через первый согласующий усилитель 8, сумматор 9 и дополнительный усилитель 10 мощности, другой выход соединен с электрическим входом гидроклапана 5 давления через блок 11 деления и усилитель 12 мощности, На регулирующем органе гидронасоса 2 установлен датчик 13 положения, выход которого через второй согласующий усилитель 14 соединен с блоком 11 деления, а через третий согласующий усилитель 15 и сумматор 9 - с входом дополнительного усилителя 10 мощности. Максимальное давление в напорной магистрали гидронасоса 2 ограничивается предохранительным клапаном 16. На сливной магистрали стенда установлены маслоохладитель 17 и фильтр 18.Стенд работает следующим образом.При работе двигателя 1 гидронасос 2 создает на его валу момент сопротивления, равныйЧ "ЬР(1) где ЬР - перепад давления в напорноймагистрали гидронасоса;рабочий объем гидронасоса,который, например, для аксиально-поршневого гидронасоса вычисляется по формуле1 2 Я С 1 2-- В сР = - --- ВР,5593 30 35 40 45 50 5 161угол поворота регулирующегооргана;Р: - диаметр окружности, на которой расположены оси поршнейгидронасоса.По формулам (1) и (2) определяют угол поворота регулирующего органа насоса ( ) и давление ЫР) в магис-. ,трали нагнетания, необходимые для создания заданного тормозного момента М.Тормозной момент (М), получаемый на валу испытуемого двигателя, пропорционален значению Р, где уголвычисляется по огибающей Мо (позиция 25,фиг,3) при фиксированном перепаде давления Р , равном максимально возможному, а давление Р 3 определяется исходя из заданного тормозного момента М и текущего положениярегулирующего органа гидро- насоса 2,При испытании двигателя на первом выходе блока 6 программного управления формируется сигнал Мо = Ко Мо,где К - коэффициент пропорциональФОности между огибающей М и сигналом,поступающим с выхода блока 6 програм 1 много управления. Сигнал И поступает на вход первого согласующего уси.-. лителя 8 с коэффициентом усиления, равнымИ ЙК = 2 иЯР -- -02.Фпкс 4На выходе первого согласующего усилителя 8 формируется сигнал = К 1 М ) угла поворота регулирующеого органа гидронасоса. Этот сигнал поступает на вход сумматора 9, на другой вход которого поступает сигнал с датчика 13 положения, предварительно усиленный в третьем согласующемусилителе 15 с коэффициентом усиления К д, где К О - коэффициент обратной связи, Сумматор 9 вычитает сигнал, поступающий с 1 третьего согласующего усилителя 15, из сигнала, поступающего с первого согласующего усилителя 8. Результат подается на вход дополни-., тельного усилителя 10 мощности, на ,выходе которого Формируется сигнал= К(- Кщ) поступающий на входе механизма 7 управления регу-.5 лирующего органа. Угол поворота регулирующего органа отслеживает задание угла Д благодаря наличию обратной связи5 10 15 20 25 На втором выходе блока 6 программного управления формируется сигнал 4М = КМ (где Ку- коэффициент пропорциональности между заданным моментом Ми сигналом, поступающим с блока 6 программного управления,Сигнал М" поступает в блок 11 деления, на другой вход которого поступает сигнал с датчика 13 положения, предварительно усиленный во втором согласующем усилителе 14 с коэффициентом усиления К = д ВрЕ/8,2 В блоке 11 деления производится вычисление сигнала задания Д.Рпутем деления сигнала, поступающего из блока 6 программного управления, на сигнал, поступающий от второго согласующего усилителя 14, т,е. ЬР = М /К . Сигнал задания ЬР поступает на вход усилителя 12 мощности, на выходе которого формируется управляющий сиг-. нал Б = К 4Р, где Кф - коэффициент пропорциональности между сигналом задания Р и управляющим сигналом,Управляющий сигнал Б поступает на катушку электромагнита 19 гидроклачана 5 давления. Пропорционально сигналу Б изменяется усилие на управляющем элементе 20, а следовательно, сопротивление потоку жидкости, вытекающей через управляющий элемент 20 и дроссель 22 золотника 21 на сливВ результате возникает перепад давления, который вызывает подъем или опускание золотника 21 гидроклапана 5 давленияЭто обуславливает уровень давления в напорной магистрали, пропорциональный входному электрическому сигналу П, а следовательно, заданию давления ЬР. Формула изОбретения Стенд для испытания двигателя вращательного движения, содержащий гидро- насос, напорная магистраль которого соединена с гидроклапаном давления; снабженным электрическим входом,блок программного управления и усили"тель мощности, причем выход блокапрограммного управления соединен сэлектриЧеским входом гидроклапаначерез усилитель мощности, о т л и -ч а ю щ и й с я тем, что, с цельюповышения точности испытания и быст.родействия гидроклапана давления,гидронасос снабжен регулирующим ор 16155931 О гном с механизмом управления и датчКом положения, а стенд дополнительно содержит блок деления с двум входами и выходом, первый, втор йи третий согласующие усилители, д полнительный усилитель мощности и су атор с двумя входами и выходом, пр чем регулирующий орган кинематиче ки связан с механизмом управления и атчиком положения, блок программн го управления имеет два выхода, од н из которых соединен. через первый вход блока деления и усилитель мощности с электрическим входом гидроклапана давления, а второй выход сое-динен через первый согласующий усилитель, второй вход сумматора и дополнительный усилитель мощности с механизмом управления регулирующим органом насоса, выход датчика положениясоединен через второй согласующийусилитель с вторым входом блока деления, а через третий согласующий усилитель - с первым входом сумматора.Заказ 3982 Тираж ВНИИПИ Государственного 113035, итель В.Г Л.Олийнык комитета по изобретениям и открытиям при ГКНТ СССРМосква, Ж, Раушская наб., д, 4/5 ский комбинат "Патент", г, Ужгород, ул. Гагарина, 101
СмотретьЗаявка
4431198, 26.05.1988
ЧЕЛЯБИНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. ЛЕНИНСКОГО КОМСОМОЛА
ШТЕССЕЛЬ ВЛАДИМИР БОРИСОВИЧ, СТАРОВЕРОВ ЮРИЙ АЛЕКСЕЕВИЧ, ТРОИЦКИЙ ВЛАДИМИР ЛЬВОВИЧ
МПК / Метки
МПК: G01M 15/00
Метки: вращательного, двигателя, движения, испытания, стенд
Опубликовано: 23.12.1990
Код ссылки
<a href="https://patents.su/5-1615593-stend-dlya-ispytaniya-dvigatelya-vrashhatelnogo-dvizheniya.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для испытания двигателя вращательного движения</a>
Устройство для измерения отношения “сигнал-помеха” и мощностей сигнала и шума каналов связи

Номер патента: 1109681
Опубликовано: 23.08.1984
МПК: G01R 29/26
Метки: каналов, мощностей, отношения, связи, сигнал-помеха, сигнала, шума
...введены два термисторных преобразователя,.квадратор и второй блок вычитания,81 2при этом выход линейного детектора через первый термисторный преобразователь соединен с первым входом первого блока вычитания и с входом квадратора, выход которого соединен с первым входом второго блока вычитания, второй вход последнего через второй термисторный преобразователь соединен с,выходом квадратичного детектора, выход второго блока вычитания через блок извлечения квадратного корня соединен с вторым входом первого блока вычитания, с первым входом блока регистрации и с одним из входов блока деления напряжений, второй вход которого подключен к выходу первого блока вычитания и к второму входу блока регистрации, третий вход которого соединен с выходом...
Устройство для автоматической регулировки мощности сигнала

Номер патента: 560317
Опубликовано: 30.05.1977
Авторы: Григорянц, Колосов, Лаптев
МПК: H03G 3/20
Метки: автоматической, мощности, регулировки, сигнала
...управления амплитудой напряжения которого подсоединен к выходу управляющего эле. мента 5.или Устройство работает следующим образом.При подаче на вход генератора 1 с внешним возбуждением сигнала с частотой со и на вход фазового модулятора 2 от дополнительного генератора 9 сигнала с частотой И на входе полосового фильтра б будет существовать спектр частот, определяемый соотноше- нием У =У,з 1 п(щ 1+тфв 1 пй 1) =У,1,(тф) з 1 п (а + пй) =Ап (Утф) з 1 п Х Х (ф+ ий,)где К, - амплитуда несущей частоты;Л, - амплитуда п-ой боковой составляющей;У(тф) - функция Бесселя п-го порядкаот аргумента;тф - индекс фазовой модуляции.Таким образом, амплитуда любой составляющей спектра сигнала Ап. является функцией амплитуды несущей частоты и индекса...
Устройство для автоматической регулировки мощности сигнала

Номер патента: 1091305
Опубликовано: 07.05.1984
Авторы: Лаптев, Репин, Тулин, Харчев
МПК: H03G 3/20
Метки: автоматической, мощности, регулировки, сигнала
...Яня нход направленного ответвителя 3 поступает Фазомодулированцый сигнал. Этот сигнал проходит через направленный ответнитель 3 на вход полосового фильтра 4, (/1 ириня полосы пропускания полосового фильтра 4 удовлетворяет условию Я ( 5 оп ш 0/где о/,е- частота вход - ного сигнала, Полоса пропускания этого Фильтра в предлагаемом устройстве значительно (дире (ца два-три порядка )полосье проускания известного полосового Фильтра,Полезной спектральной составляющей выходного сигнала - сигнала некратного преобразования частоты - является одна из боковых Фязомодулированного сигнала, например спектральная составляющая с частотойо +ЯмС второго выхода бокового плеча направленного отнетвителя 3 часть мощности сигнала подается на вход...
Механизм для соединения пружинньх блоков мягкой мебели

Номер патента: 262338
Опубликовано: 01.01.1970
Авторы: Алексеенко, Бочаров, Гузев
МПК: A47C 23/053
Метки: блоков, мебели, механизм, мягкой, пружинньх, соединения
...снабженный с двух боковых продольных сторон двумя парами направляющих 2 и 3, на каждой из которых установлено по одной каретке 4 на четырех катках 5. 11 каждой карет. ке установлен электродвигатель 6; вал 7 которого фрикционно контактирует с приводным диском 8 сшивного механизма, Последний включает стойку 9 с валом 10, несущим с одного конца приводной диск 8. а с другого конца гибкий вал 11 с наконечником 12, захватывающим сшивающую цилиндрическую спиральную пружину 18. На корпусе каретки шарнирно укреплена подпружиненная ножная педаль 14 механизма включения, несущая на верхнем конце жестко закрепленную стойку 9 ситивного механизма, Для удерживания сшивной пружины 18 в удобном ири работе положении на каретке имеется стойка 15 с шарнирным...
Стыковое соединение смежных блоков железобетонной балки

Номер патента: 360450
Опубликовано: 01.01.1972
Авторы: Иосилевский, Чирков
МПК: E04B 1/61
Метки: балки, блоков, железобетонной, смежных, соединение, стыковое
...этих стержней переменная и равна высоте блока 1 в зоне стыка, а диаметр стержней равен диаметру напрягаемых хомутов. После бетонирования временные стержни удаляют, в результате чего образуются каналы 3 для напряженных хомутов в блоке 1. После отпуска натяжения арматуры блок 1 вынимается из стенда.В т о р а я с т а д и я. Изготовление блоков 11. Чтобы достигнуть плотного прилегания по контакту блоков 1 и 11, блок 1 используется в качестве опалубки по поверхности косого стыка.Соприкасающуюся с блоком 11 поверхность блока 1 смазывают или в зону контакта вставляют тонкие упругие разделяющие прокладки. В образованные ранее каналы 3 блока 1 вставляются изолированные от сцепления с бетоном напрягаемые хомуты 2 длиной, равной полной высоте...
Предыдущий патент: Стенд для обкатки двигателя внутреннего сгорания
Следующий патент: Способ ускоренных испытаний дизеля на надежность
Случайный патент: 160348