Способ управления планарным шаговым электродвигателем на воздушной опоре
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1539953
Автор: Мельников





Текст
(57) Изобретени технике, его це вать при создан относиесообра я к эл но исп ктрользоавтоматизи ь изобре- надежност и гибкихдств. Цеповышении ованных произв этого 2 ил,стоит ведотвращ тения путем е давливания Изо правл. дь ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР ПИСАНИЕ ИЗОБРЕ К А ВТОРСНОМУ СВИДЕТЕЛЬСТВУ(54) СПОСОБ УПРАВЛЕНЙЯГОВЫИ ЭЛЕКТРОДВИГАТЕЛЕИОПОРЕ етение относится к технике ия электрическими машинами и может быть использовано в д динатном электроприводе.Цель изобретения - повышение надежности путем предотвращения продавливания воздушной опоры при несимметричной нагрузке якоря.Осуществление способа рассматривается на примере работы устройства для реализации способа.На фиг,1 приведена схема блока выравнивания воздушного зазора; на фиг,2 - блок-схема устройства управвоздушной опоры при несимметричной нагрузке якоря. Способ состоит в то что в пространство между якорем и и дуктором через отверстия в якоре, расположенные в симметричных зонах, подают сжатый воздух, на фаэные обмотки якоря подают управляющие кома ды, в указанных зонах измеряют давл ние сжатого воздуха, вычисляют сред нее давление и определяют наименее нагруженную зону. Когда давление в этой зоне станет меньше среднего на заранее заданную величину, подачу воздуха в эту зону прекращают, а ко да давление в этой зоне вновь возра тает на эту величину, подачу воздух восстанавливают, Если наякорь действует недопустимьп разворачивающий момент, то якорь фиксируют на индукторе на период действиявозмущения. 1 з.п. ф-лы,ЖПланарньй шаговый двигатель сос;ф тоит из подвижного якоря 1 и неподвиж- д ного индуктора 2, На элементарных в . пневмовходах якоря установлены управляемые регуляторы расхода воздуха г(УРРВ) 3-6. Кроме того, просверлены специальные отверстия и установлены датчики 7-10 давления. На якоре 1 могут быть просверлены дополнительные файф пневмовходы, каждый из которых соеди- аай няется с тем УРРВ, который установлен в противолежащей относительно центра зоне якоря 1 (показано пунктиром для УРРВ 3 и 5, аналогичные воздухопрово-от УРРВ 4 и 6 нв показаны). Управ-,1539953 ляющие сигналы от задатчика 11 поступают через набор 12 логических элементов И 13-16, Выход каждого из логических элементов соединен через соответствующий иэ усилителей 17-20 с одним из управляемых регуляторов 3-6,Каждый из датчиков 7-10 давлениясоединен через соответствующие усилители 21-24 с вычислителями 25 и 26,Вычислители выполнены одинаковыми, поэтому представлена структура тольковычислителя 25, включающего в себязадатчики 27-30 координат датчиковдавления, поДключенных к входам блоков 31-34 умножения, вторые входы которых соединены с выходами усилителей17-20, а выходы - с входами первогосумматора 35, выход которого подклю.чен к входу блока 36 деления, второйвход которого соединен с выходом вто"рого сумматора 37, входы которогосоединены с вторыми входами блоков31-34 умножения,Выходы вычислителей 25 и 26 черезпороговые элементы 38 и 39 подсоединены к входам дешифратора 40 состоящего из двух инверторов 41 и 42, четырех элементов И 43-46 и четырехэлементов ИЛИ 47-50, Выход сумматора 37 соединен с задающим блоком 51пороговых элементов, включающим в себя блок 52 деления на число установленных датчиков давления, Вычислительф26 не имеет этой связи, В блок 51 входят .также сравнивающие элементы 53-56и пороговые Ълементы 57-60,На якоре 1 установлен исполнительный механизм 61, например, манипулятор.На Фиг.2 представлена результирующая блок-схема устройства управления, В ее состав входят также два;и 63 управления декартовым перемеще.нием по координатам, канал 64 управ 1 ления воздушным зазором в Функциисмещения центра масс механизма относи1тельно центра масс якоря, канал 65управления воздушным зазором в йункции действия на якорь 1 разворачивающего момента, Например, канал 63 состоит из задатчика 66 частоты управления, распределителя 67 импульсов,задатчика 68 направления движения,усилителя 69 мощности, задатчика 70величины перемещения по координате,реверсивного счетчика 71, выходы которого через преобразователь 72 коданалог связаны с входом управляемого генератора 73 импульсов, частота вы ходных импульсов которого пропорциональна числу импульсов, поданных на 5вход + , т.е, величине перемещения,и иВыход генератора 73 подключен к одному из входов элемента И 74, к второму входу которого подключен нулевой разряд реверсивного счетчика 71. Выход элемента И 74 через логический элемент И 75 одновременно соединен с входом распределителя 67 импульсов и с входом "-" реверсивного счетчика 7 1В состав канала 65 входят пороговый,элемент 76, на вход которого подается сигнал с выхода первого суммирующего элемента 77, Суммирующий вход элемента 77 соединен с задатчиком 78 допустимого по условию движения разворачивающего момента И, а вычитающий вход соединен с датчиком 79 момента,Выход задатчика 78 допустимого момента соединен с УРРВ 80 через элемент 25 И 84 и усилитель 82, На второй входэлемента И 81 подается сигнал от второго порогового элемента 83, который соединен с выходом второго суммирующего элемента 84 Суммирующий вход этого элемента соединен с задатчиком 85 максималЬно допустимого разворачивающего момента 1, а вычитающий вход соединен с датчиком 79 момента,Устройство для осуществления способа работает следующим образом.Допустим, что действующий наякорь 1 разворачивающий момент со стороны манипулятора 61 отсутствует.Управляющий сигнал от задатчика 78 через логический элемент И 81 и усилимтель 82 поступает на УРРВ 80 и открывает его. В результате воздух поступает непосредственно к якорю и через отверстия проходит в зазор между якорем 1 и индуктором 2. На задатчике 11 устанавливают сигнал, который через усилители 17-20 поступает на обмотки УРРВ 3-6, Если центр масс установленного механизма 61 смещен, например, в т.С(Х,У), то когда давление в зоне УРРВ 5 станет меньше среднезадан,ного на установленную величину ьр, при которой еще отсутствует продавливание пневмоопоры в зоне УРРВ 3, свыхода элемента 60 блока 51 пороговых элементов на второй вход логического .элемента ИЛИ 50 поступает сигнал логического нуля (на первом входе элемента ИЛИ 50 также присутствует логи5 15399 ческий нуль, поступающий с дешифратора 40), В результате на втором входе элемента 15 устанавливается логический нуль, УРРВ 5 отключается и увеличенный зазор в зоне УРРВ 5 начинает уменьшаться, благодаря чему давление сжатого воздуха начинает в этой зоне возрастать. Когда оно возрастет на величину др, логический сигнал на пороговом элементе 60 изменяется с нуля на единицу, благодаря чему сигнал от задатчика 11 через элемент 15 проходит. В результате УРРВ 5 включается вновь. Если, например, смещение центра масс манипулятора вновь создает в менее нагруженной зоне якоря 1 давление, меньшее среднезаданного на Ьр, процесс повторяется, 20 Когда действующий на якорь 1 разворачивающий момент И меньше допустимого по условию движения, то на фазные обмотки поступают управляющие команды. Как только разворачивающий момент станет больше момента И, то на втором входе элемента И 75 устанавливается логический нуль и в результате управляющая частота на распределитель б 7 импульсов и на вычитающий вход реверсивного счетчика 71 не проходит - якорь останавливается. Если разворачивающий момент продолжает нарастать и становится больше максимально допустимого разворачивающего момента И , то УРРВ 80 закрывается. Сжатый воздух при этом сбрасывается в атмосферу. Воздушный зазор 3 между якорем 1 и индукто-ром 2 уменьшается до нуля. По окон 40 чании действия разворачивающего момен 53 . 6та исходное состояние восстанавливается в обратной последовательности,после чего двигатель отрабатываетоставшуюся часть пути,формула изобретения 1, Способ управления планарным шаговым электродвигателем на воздушной опоре, состоящий в том, что в пространство между якорем и индуктором подают воздух через отверстия в якоре, на обмотки якоря подают управляющие импульсы, фиксируют превышение разворачивающим моментом предельного значения и прекращают подачу воздуха на время этого превышения, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности путем предотвращения продавливания воздушной опоры при несимметричной нагрузке якоря, дополнительно измеряют давление воздуха в двух точках воздушной опоры, расположенных вдоль прямой, соединяющей центр якоря с отверстиями подачи воздуха, определяют среднее арифметическое этих давлений и величину отклонения меньшего из них от среднего и при превышении отклонением заданной величины прекращают подачу воздуха в отверстие на якоре, ближайшее к точке пониженного давления, и вновь подают воздух в зто отверстие после выравнивания давленийв указанных точках,2, Способ по п.1, о т л и ч а ющ и й с я тем, что при прекращении подачи воздуха в зону пониженного давления увеличивают подачу воздуха в зону повышенного давления.1539953 Составитель В.АлТехред И.Ходан ор А.О 42 Подписноеа по изобретениям и открытияЖ, Раушская наб., д. 45 ри ГКНТ ССС изводственно-издательский комбинат "Патент", г, Ужгород, ул. Гагарина, 10 акНИИПИ 28Государственного113035 ираж омит оскв мов Корректор 11,Шар
СмотретьЗаявка
4339381, 09.12.1987
Н. В. Мельников
МЕЛЬНИКОВ НИКОЛАЙ ВИКТОРОВИЧ
МПК / Метки
Метки: воздушной, опоре, планарным, шаговым, электродвигателем
Опубликовано: 30.01.1990
Код ссылки
<a href="https://patents.su/5-1539953-sposob-upravleniya-planarnym-shagovym-ehlektrodvigatelem-na-vozdushnojj-opore.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления планарным шаговым электродвигателем на воздушной опоре</a>
Способ удаления воздуха из мертвых зон замкнутых объемов системы охлаждения летательных аппаратов

Номер патента: 479353
Опубликовано: 27.12.2005
Авторы: Бурмистров, Гусляников, Хренов
МПК: B64D 13/06, F25B 43/04
Метки: аппаратов, воздуха, замкнутых, зон, летательных, мертвых, объемов, охлаждения, системы, удаления
Способ удаления воздуха из мертвых зон замкнутых объемов системы охлаждения летательных аппаратов путем вакуумной обработки жидкого теплоносителя при заправке им систем охлаждения, отличающийся тем, что, с целью обеспечения эффективного удаления воздуха из мертвых зон замкнутых объемов и повышения эксплуатационной надежности систем охлаждения, жидкий теплоноситель пропускают через вакуумированную среду и подают под давлением в предварительно неполностью заполненный теплоносителем замкнутый объем, а затем теплоноситель, насыщенный воздухом, опять подают в вакуумированную среду, причем давление в вакуумированной среде поддерживают близким к давлению кипения теплоносителя при окружающей...
Устройство для определения момента экстремума гармонического сигнала

Номер патента: 789797
Опубликовано: 23.12.1980
Авторы: Двойниченко, Куприк
МПК: G01R 19/04
Метки: гармонического, момента, сигнала, экстремума
...половинам периодов (О) и по фазе совпадающими со входным сигналом, сигнал Ц поступает на входы несимметричного огра;ничителя 3 и логического элемента И 5. На выходе несимметричного ограничителя 3 формируются прямоугольные импульсы О со стабильными амплитудами, причем амплитуда положительного полупериода в два раза меньше амплитуды отрицательного полупериоца (на фиг. 2 амплитуды а и 2 о )Сигнал О поступает на вход интег. ратора 4, Сигнал на выходе интегратора 4 описывается выражением где Т -период выходного .сигнала Оа О= 0 при с =фТ.Сигнал 0 поступает на вход форми- рователя 2 импульсов, на выходе которого Формируются прямоугольные импульсы напряжения с отрицательной амплитудой если О 4, 69 и положительной амплитудой если О, О ( сигнал...
Устройство для определения моментов экстремумов гармонического сигнала

Номер патента: 941904
Опубликовано: 07.07.1982
Авторы: Катков, Лебедев, Попов, Попова
МПК: G01R 19/04
Метки: гармонического, моментов, сигнала, экстремумов
...к второму выходу генератора импульсов, а вьход переносастаршего разряда второго счетчикаявляется выходом устройства.Источники информации,принятые во внимание при экспертизе1, Патент США Ь" 3764903 кл.32483 Эопублик. 1973.2.Авторское свидетельство СССР Иф 677470 кл. С 01 й 23/16,1978(прототип) . 3 9419щий вход которого подключен к выходу нуль-органа, вьходы разрядоввторого счетчика через элемент ИЛИсвязаны с управляющим входом второго ключа, информационный вход которого подключен к второму выходу генератора импульсов, а выход переноса старюего разряда второго счетчика является выходом устройства,На чертеже представлена блок Осхема предлагаемого устройства,Устройство содержит нуль-орган 1элемент 2 задержки, счетчики 3 иключи...
Устройство для одноканального синхронного фазового управления вентильным преобразователем

Номер патента: 1046894
Опубликовано: 07.10.1983
МПК: H02P 13/16
Метки: вентильным, одноканального, преобразователем, синхронного, фазового
...первого днухвходоного элемента И 17 соединен с вторым выходом второго триггера 9 управления,второй вход - с первым выходом первого триггера 8 управления, а выход первого днухнходоного элемента И 17 связан с первым входом второ" го элемента ИЛИ, 19, Первый вход второго двухн ходов ого элемента И 18 соединен с вторым выходом первого триггера 8 управления, второй вход - с .первым выходом второго триггера 9 управления, а выход связан с вторым входом второго двухнходоногс элемента ИЛИ 19. Выход второго двухвходового элемента ИЛИ 19 соединен с вто" рым входомтретьего элемента И 20, выход которого связан с первым вховторой 29, третий 30 элементы ИЛИ-НЕблока синхронизации, первый трехвходоный элемент ИЛИ 31 с инверснымдинамическим выходом блока...
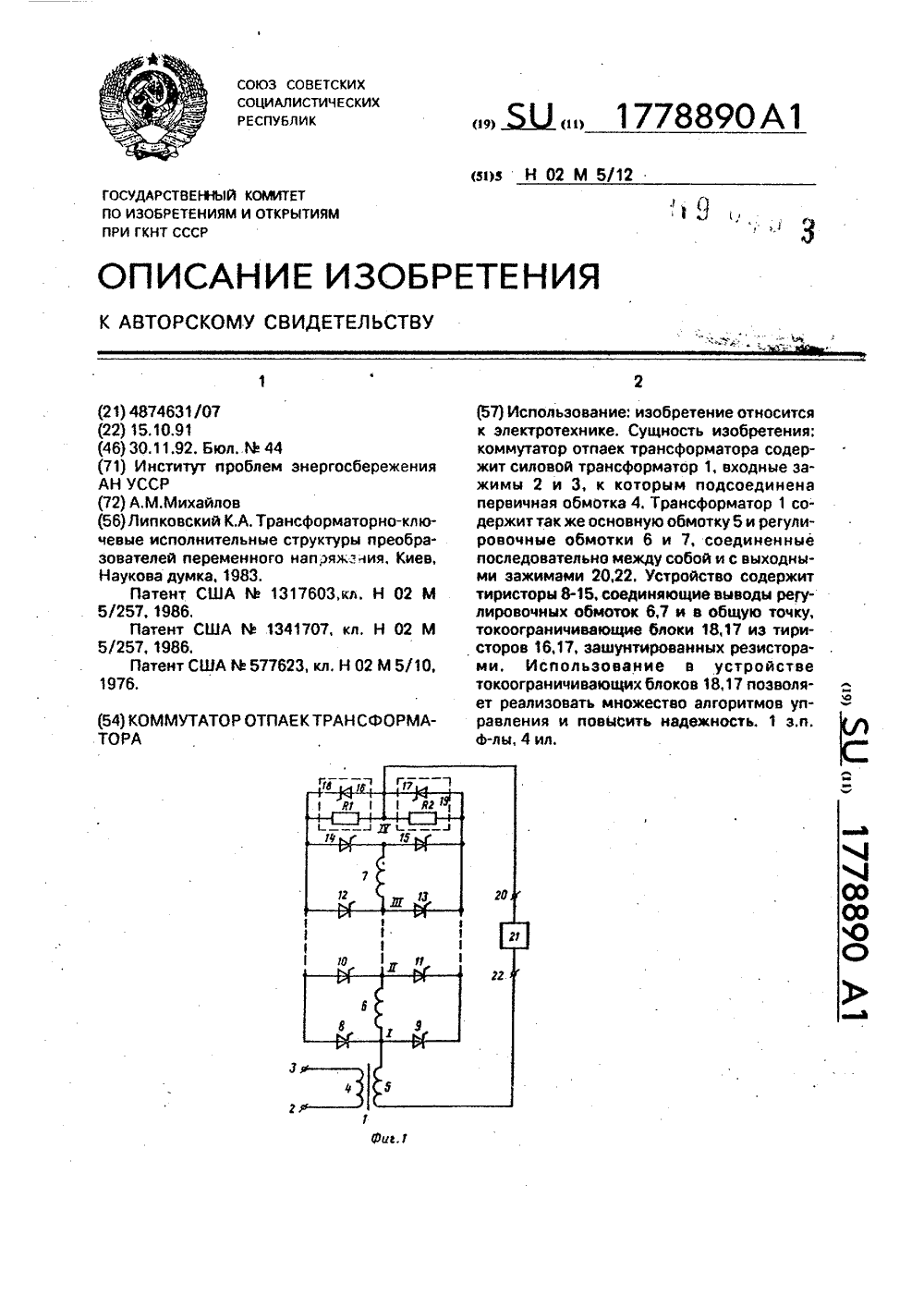
Коммутатор отпаек трансформатора
Номер патента: 1778890
Опубликовано: 30.11.1992
Автор: Михайлов
МПК: H02M 5/12
Метки: коммутатор, отпаек, трансформатора
...младшего разряда дешифратора 40 соединен со вто. рым входом элемента И-НЕ 35, а выходстаршего разряда - со вторым входом элемента И-НЕ 38, выходы элементов И-НЕ 35 и 38 соединены с входами элемента И-НЕ 37, а выход последнего соединен с седьмым входом элемента ИЛИ 36.В качестве формирователей прямоугольных импульсов 23, 26, 28, 29 на схеме (фиг, 3) использованы ЯЯ-триггеры, обеспечивающие задержку, равную половине периода напряжения О. Вместо триггеров могут быть использованы другие известные схемы с регулированием длительности импульсов в широких пределах (одновибрэторы, формирователи с использованием счетчиков, таймеры и т.д.),В качестве преобразователя тока в напряжение могут быть применены трансформатор тока, нагруженный на...
Предыдущий патент: Электропривод переменного тока
Следующий патент: Автономная дизель-электрическая станция
Случайный патент: Выпускная система двигателявнутреннего сгорания