Устройство для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
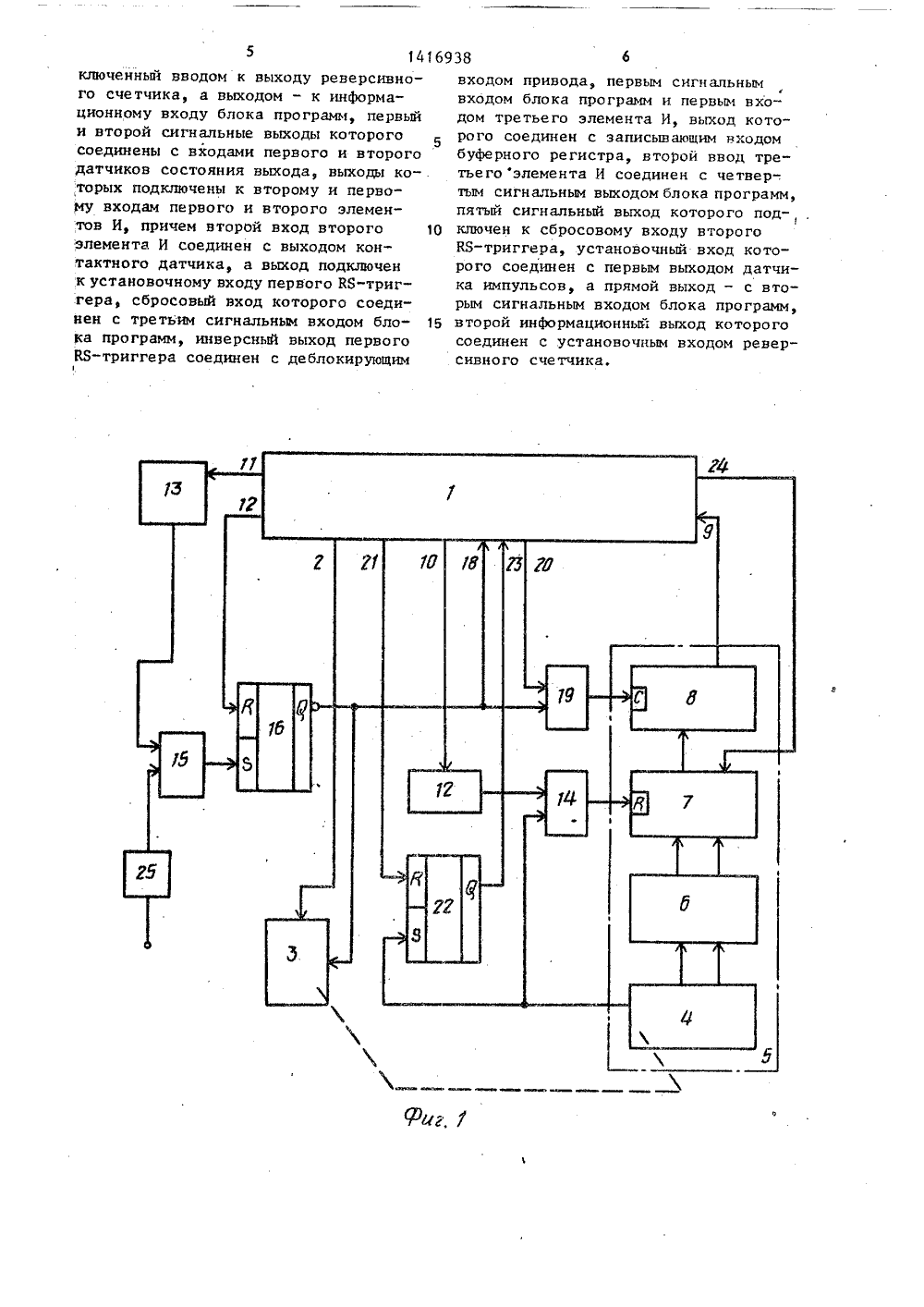
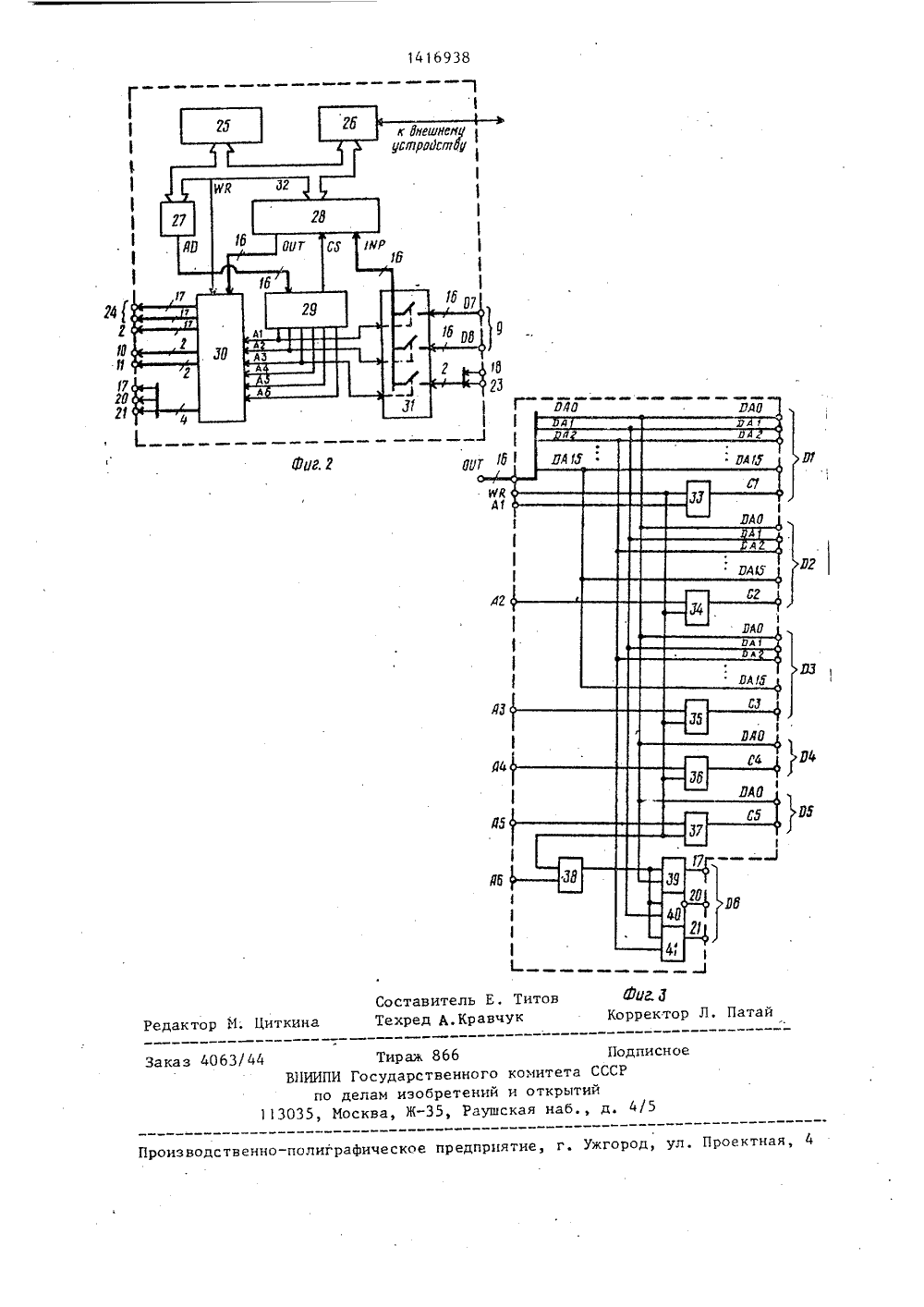
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИН 19) 5 В 19/18 ИЕ ИЗОБРЕТЕНИЯМу СВИДЕТЕЛЬСТВУ АВТОРСН ельн д ССР986. ССР 19ГРАМОТНОГО УП- ся к автомарегистра сигнал вл нияизоок бо технике и модля программнои реалревер ри раз ана во ых режим можность заданной апис вныи расыми робот нием типаоордин аьные воэм ч етч ет ункционал ва для п шир уст ожностио управле-. я привязки й детали к раммно оис также в 00 УДАРСТВЕННЫЙ КОМИТЕТ СССРДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(54) УСТРОЙСТВО ДЛЯ ПР РАВЛ ЕНИЯ(57) Изобретение относ тике и вычислительной жет быть использовано го управления промышле ми и станочным оборудо обрабатывающий центр дл координат обрабатываем системе координат стан координатных измерительных машинах и в устройствах измерения угловых и линейных величин. Цель изобретения- повышение быстродействия, точности .и расширение функциональчых возможностей устройства. Указанная цель достигается тем, что в устройство дополнительно введены два ВЯ-триггера датчики состояния выхода, блок интерполяции, буферный регистр, что и обеспечивает повышение быстродейст.вия и точности позиционирования при разных режимах работы и позволяет эффективно применять фотоэлектрические датчики при контроле и измерении угловых и линейных величин (2-й и 3-й класс точности). Кроме того, реали" зован сброс реверсивного счетчика иУстройство относится к автоматике и вычислительной технике и можетбыть использовано дпя программногоуправления промьвлеццыми роботами истаночным оборудованием типа обрабауывающего центра.Цель изобретения - повышение быстродействия и точности и расширениеФункциональных воэможностей устройства программного управления,На Фиг, 1 представлена структурная электрическая схема устройствадля программного управления; на Фиг.2 -блок программ; на фиг. 3 - коммутатор.Устройство содержит блок 1 программ с первым информационным выходом2, привод 3, кинематически связанныйс датчиком 4 импульсов датчика 5 перемещеций, и который также входятпоследовательно соединенные блок бинтерполяции, реверсинцый счетчик 7и буферный регистр 8, выход которогоподсоединен к информационному входу 259 блока программ, Первый и второйсигнальные выходы 10, 11 блока программ через датчики 12, 13 состояниявыхода подключены к входам элементовИ 14, 15, Элемент И 15 подсоединен 30ныходом к установочному входу ЕБ-триггера 16, сбросовый вход которого подключен к третьему сигнальному выходу17 блока программ, Выход Ю-триггера 16 подсоединен к деблокирующемувходу привода, сигнальному входу 18блока программ и первому входу третьего элемента И 19, к второму входукоторого подключен четвертый сигнальный выход 20 блока программ, а пятьйсигнальный выход 21 подключен к сброс,оному входу КБ-триггера 22. Прямойвыход ВЬ-триггера 22 подсоединен ксигнальному входу 23 блока программ,второй информационный выход 24 которого подключен к установочному входуреверсивного счетчика, В устройствовходит контактный датчик 25.Блок 1 программ состоит из контактного датчика 25, блока 26 связис внешним устройством, адресного регистра 27, шинного формирователя 28,адресного дешифратора 29, коммутатора30 выходов, коммутатора 31 входов,системной магистрали 32.Коммутатор 30 выходов содержитдевять элементов И 33-41, осуществляющих коммутацию информационных каналов: выходов блока 1 программ, причем три 16-битные информационные каналы (О 0, П) образуют первый 2и второй 24 информационные выходыблока программ; два однобитных кана"ла (Р, 0) образуют соответственнопервый и второй 10, 11 сигнальные выходы для управления датчиками 12,13 состояния выхода, один трехбитныйканал (0), образующий третий сигнальный выход 17, четвертый сигнальныйвыход 20 и пятый сигнальный выход 21.Устройство работает следующим образом.Режим блока программ состоит издвух циклов: адресного и ввода-вы"вода. При адресном цикле блок программь производит начальные коммута 1 ции, при цикле ввода-вывода принимает или посыпает данные и сигналы управления н другие блоки устройства.При включении устройства блок 1программ с сигнальных выходов 21, 17приводит триггер 22 в состояние "0",а триггер 16 - в состояние "1" наинверсном выходе, тем самым деблокируя привод 3. С информационного выхода 2 блок 1 программ запускает привод 3 с максимальной скоростью. Припоявлении сигнала на выходе датчика 4 импульсов триггер 22 устанавливается в состояние "1", При появлении "1" на сигнальном входе 23 блок1 программ останавливает привод 3 позаданному закону торможения, Этимисключаются погрешности, связанные слюфтами и резкими движениями рабочего органа при реверсировации и достигается большое быстродействие установки начала координат,1Сигнальный выход 21 переводит триггер 22 н "0", а датчик 12 состояния выхода с сигнального выхода 10 устанавливается в "1", тем самым открыв ая элемен т И 1 4. По сле этого приводу 3 задается определенная скорость позиционирования в противоположном направлении. При появлении сигнала на первом выходе датчика 4 импульсов ренерсинный счетчик 7 сбрасывается к нулю через открытый элемент И 14. Тем же сигналом триггер 22 устанавливается в состояние "1" и информирует блок 1 программ что установка абсолютного начала координат произведена.В режиме Измерение" позиционирование устройства до момента получе 1416938ния сигнала контактного датчика 25 производится следующим образом.Датчик состояния выхода через выход 11 устанавливается в состояние "1", открывая тем самым элемент И 15. Через сигнальный выход 17 триггер 16 опрокидывается, и на его инверсном выходе Я устанавливается "1", дебло - кируя привод 3. Через сигнальный вы ход 21 сбрасывается триггер 22, и с его прямого выхода Я на сигнальном входе 23 появляется:"0", На сигнальном выходе 20 устанавливается "1", датчик 12 состояния выхода сбрасывается в состояние "0", Далее с информационного выхода 2 запускается привод 3 с определенной скоростью пози - ционирования. При поступлении сигнала от контактного датчика 25 через элемент И 15 триггер 16 устанавливается в состояние "1 на инверсном выходе Я. Через элемент И 19 записывается в буферный регистр 8 текущая координата со счетчика 7, соответст вующая положению детали в момент срабатывания контактного датчика 25. Одновременно отрицательный уровень сигнала на инверсном выходе Ч триггера 16 останавливает привод 3 и по сигнальному входу 18 информирует блок 1 программ. Таким образом точно фик - сируется положение точки соприкосновения контактного датчика с деталью. После этого информация о координате может считываться с регистра 8 через35 информационный вход 9 в блок 1 программ для регистрации и дальнейшей обработки.Позиционирование до заданной координаты в абсолютной системе координат происходит следующж образом,Начало координат устанавливается по сигналу с первого выхода датчика4 импульсов, как описано выше. Датчик 12 состояния выхода сбрасываетсяв состояние "0", триггер 16 устанавливается в состояние "1" на выходетем самым открывая элемент И 19. Заданная координата записывается впамяти блока 1 программ, Текущая ко 50 ордината с реверсивного счетчика 7 записывается в буферный регистр 8 через элемент И 19 сигналом блока 1 программ с сигнального выхода 20. Через информационный вход 9 текущая координата постоянно считывается исравнивается с заданной координатой. Позиционирование производится по заданному алгоритму путем уменьшения скорости перемещения с приближением до заданной координаты, Предварительная запись координаты в буферном регистре 8 позволяет считывать в блок 1 программ многоразрядное двоичнодесятичное значение координаты за несколько циклов. При равенстве значений заданной и считанной с регистра 8 координат блок 1 программ с информационного выхода 2 выдает код, останавливающий привод 3.Позиционирование до заданной координаты, в относительной системе координат происходит следующим образом.Начало координат устанавливается по сигналу с первого выхода датчика импульсов, как описано выше. Рабочий орган позиционируется до начала относите.;:-ной системы координат, заданной олоком 1 программ, или до координаты, задаваемой сигналом контактного датчика 25. В последнем случае записанная в регистре 8 координата через информационный вход 9 считывается в блок 1 программ и запоминается. Блок 1 программ через информа ционный выход 24 записывает нули в реверсивный счетчик 7. После этого происходит позиционирование к заданной новой координате описанным выше образом. При необходимости блок 1 программ в любой момент времени может пересчитать относительную координату в абсолютную,Формула из обр етенияУстройство дл. программного управления, содержащее блок программ, подключенный первым информационным выходом к приводу, кинематически связанному с датчиком импульсов, первый выход которого соединен с первым входом первого элемента И, выход которого подключен к сбросовому входу реверсивного счетчика, второй и третий эле- менты И, о т л и ч а ю щ е е с я тем, что, с целью повышения быстродействия, точности и расширения функциональных возможностей, в него введены первый и второй Ю-триггеры, первый и второй датчики состояний выхода, блок интерполяции, входы которого соединены с вторыми выходами датчика импульсов, а выходы - с суммирующим и вычитающю входами реверсивного счетчика, а также буферный регистр, под 5 14 ключенный вводом к выходу реверсивного счетчика, а выходом - к информационному входу блока программ, первый и второй сигнальные выходы которого соединены с входами первого и второго датчиков состояния выхода, выходы которых подключены к второму и первому входам первого и второго элементов И, причем второй вход второго :элемента И соединен с выходом контактного датчика, а выход подключен к установочному входу первого КЯ-триггера, сбросовый вход которого соединен с третьим сигнальным входом блока программ, инверсный выход первого ВЯ-триггера соединен с деблокирующим 16938входом привода, первым сигнальнымвходом блока программ и первым входом третьего элемента И, выход которого соединен с записывающим входомбуферного регистра, второй ввод третьего элемента И соединен с четвер-.тым сигнальным выходом блока программ,пятый сигнальный выход которого под ключен к сбросовому входу второгоВЗ-триггера, установочный вход которого соединен с первым выходом датчика импульсов, а прямой выход - с вторым сигнальным входом блока программ, 1 Б второй информационный выход которогосоединен с установочным входом реверсивного счетчика.1416938 яг Составитель Е, Титов Ю 1)2. ЮТехред А.Кравчук Корректор актор М. Циткин Заказ 4063 писк од, ул. Проектная, 4 изводственно-полиграфическое предприятие, г,4 Тираж 866 И 1 ИИПИ Государствен по делам изобрет 113035, Москва, Ж, Пого комитета СССний и открытийаушская наб., д.
СмотретьЗаявка
4157851, 08.12.1986
КАУНАССКОЕ СТАНКОСТРОИТЕЛЬНОЕ ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ИМ. Ф. Э. ДЗЕРЖИНСКОГО
ВАЛЯВИЧЮС ГЕДИМИНАС ЮРГЕВИЧ, БУДА АНТАНАС ВИТАУТАС АНТАНОВИЧ, МИНЕТАС АНТАНАС АНТАНОВИЧ, РАЮНЧЮС ИОНАС ЮОЗАПОВИЧ, ПАЛЯВИЧЮС РАМУТИС ПРАНОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного
Опубликовано: 15.08.1988
Код ссылки
<a href="https://patents.su/5-1416938-ustrojjstvo-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления</a>
Устройство для синхронизации группы блоков обработки данных

Номер патента: 660043
Опубликовано: 30.04.1979
МПК: G06F 1/04
Метки: блоков, группы, данных, синхронизации
...элемент ИЛИ для положительного сигнала.Устройство работает следующим образом.Допустим, что единичный уровень сигнала появился первым на выходе формирователя временных интервалов одного из устройств 11, на выходах формирователей остальных устройств 11 присутствует нулевойуровень, В этом случае на входе сумматора 7 по модулю два, подключенном к линии, присутствует уровень логическойединицы, а на входе, подключенном к выходу формирователя временных интервалов, присутствует уровень логического нуля. На выходе сумматора по модулю двапоявляется уровень логической единицы,который устанавливает триггер в единичное состояние, Сигнал с выхода триггера6 устанавливает формирователь временныхинтервалов в нулевое состояние. Согласуюгций блок 3...
Устройство для контроля блоков памяти

Номер патента: 1444896
Опубликовано: 15.12.1988
Авторы: Багян, Биккулов, Великовский, Смирнов, Чистяков, Шульга
МПК: G11C 29/00
...с выхода элемента И 119 проходит через второй выход блока 8, четвертый вход блока 4 (фнг.б) и блокирует элементы И 4850 148-8, т,е. сигналы записи, Счетчик 127 начинает отсчитывать время паузы, начиная с записанного в негокода константы 001111000110 =1586,., Во время паузы на выходе формирователя 173 блока 15 формируется сигнал, который пос туп ает в источник 1 7 для управления напряжением питания. По окончании паузы на выходе переноса счетчика 127 появляется единичный уровень, по которому триггеры 136 и 135 возвращаются в исходное состояние, При этом счетчики 70-72 разблокируются, а также снимается блокировка с элементов И 48-1 48-8 блока 4, Аналогично записи нулей производится запись единиц по всем адресам контролируемой памяти. По...
Измеритель времени выхода коэффициента передачи за заданные пределы

Номер патента: 1809396
Опубликовано: 15.04.1993
Авторы: Белоусов, Мырова, Савицкий, Соловьев
МПК: G01R 29/02
Метки: времени, выхода, заданные, измеритель, коэффициента, передачи, пределы
...импульсов 16 на счетчик 14 не проходят. Индикатор 15 показывает нулевое состояние счетчика 14,При воздействии на исследуемое линейное радиоэлектронное устройство импульсного дестабилизирующего фактора его коэффициент передачи изменяется, а непосредственно после воздействия начинает восстанавливаться, что ведет к изменению его выходного напряжения (фиг. 2 а). Это влечет разбалансирование схемы и появление на выходе дифференциального усилителя 4 переменного напряжения с частотой генератора 2 (фиг. 2 б), При выходе напряжения за пороговые значения, определяемые блоками 1 и 12, на выходе двух- порогового компаратора 5 появляется стробирующий импульс (фиг. 2 в), Через линию задержки 6, которая предотвращает многократные срабатывания...
Управляемый датчик случайных чисел

Номер патента: 1160407
Опубликовано: 07.06.1985
Авторы: Бурба, Романов, Якушев
МПК: G06F 7/58
Метки: датчик, случайных, управляемый, чисел
...16 и блок 17возведения в степень,Датчик работает следующим образом.Непрерывные значения заданнойфункции распределения с блока 1 вводапоступают в блок 3 дифференцированияи кнантаватель 4. С блока 3 значения Гподаются в блок 6 памяти,откуда возвращаются на второй входблока 3, с второго выхода которогоснимаются значения второй производнойГи направляются в блок 7определения максимума. Этот блокопределяет наибольшее значение второйпроизводной заданной функции распределения и соответствующую ему абсциссу. По сигналу с .блока 7 блок 6 памяти выдает на вход делителя 8 значение первой производной, соответствующее участку наибольшей кривизны за3 1604 данной функции распределения. На другой вход делителя поступает умноженная на два с помощью...
411435

Номер патента: 411435
Опубликовано: 15.01.1974
МПК: G05B 19/08
Метки: 411435
...15, шина 16 установки в исходное состояние, шина 17 сброса программатора,Программатор работает следующим образом,При включении источника питания 1, узел 2 осуществляет автоматическую установку программатора в исходное состояние, кратковременно подключая к шине 16 положительный полюс источника питания. В это же время начинает работать генератор 3, но его выходной сигнал не поступает в блок 4, так как вход его заперт. На коммутационном поле 13 набирают заданную программу, для чего перемычками соединяют гнезда, одни из которых соединены с выходами распределителя импульсов 8, а другие - со входами каналов введения команд. Одной или несколькими перемычками, в зависимости от количества команд или точности их задания, определяется начало...
Предыдущий патент: Устройство для управления приводом
Следующий патент: Устройство для управления следящим приводом
Случайный патент: Устройство для регулирования натяжения основных нитей на навое текстильной машины