Устройство для коррекции эквидистанты в системах числового программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
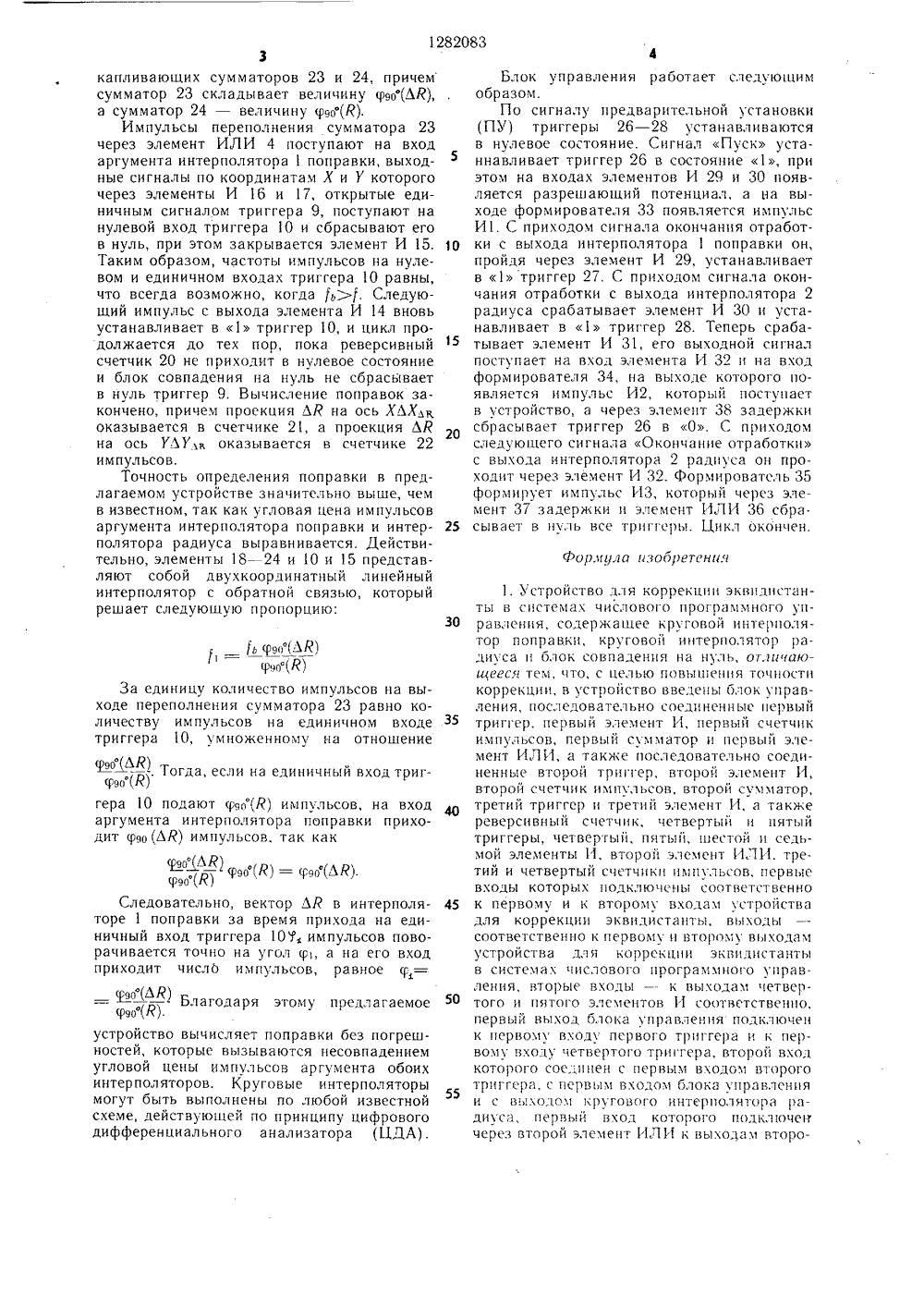
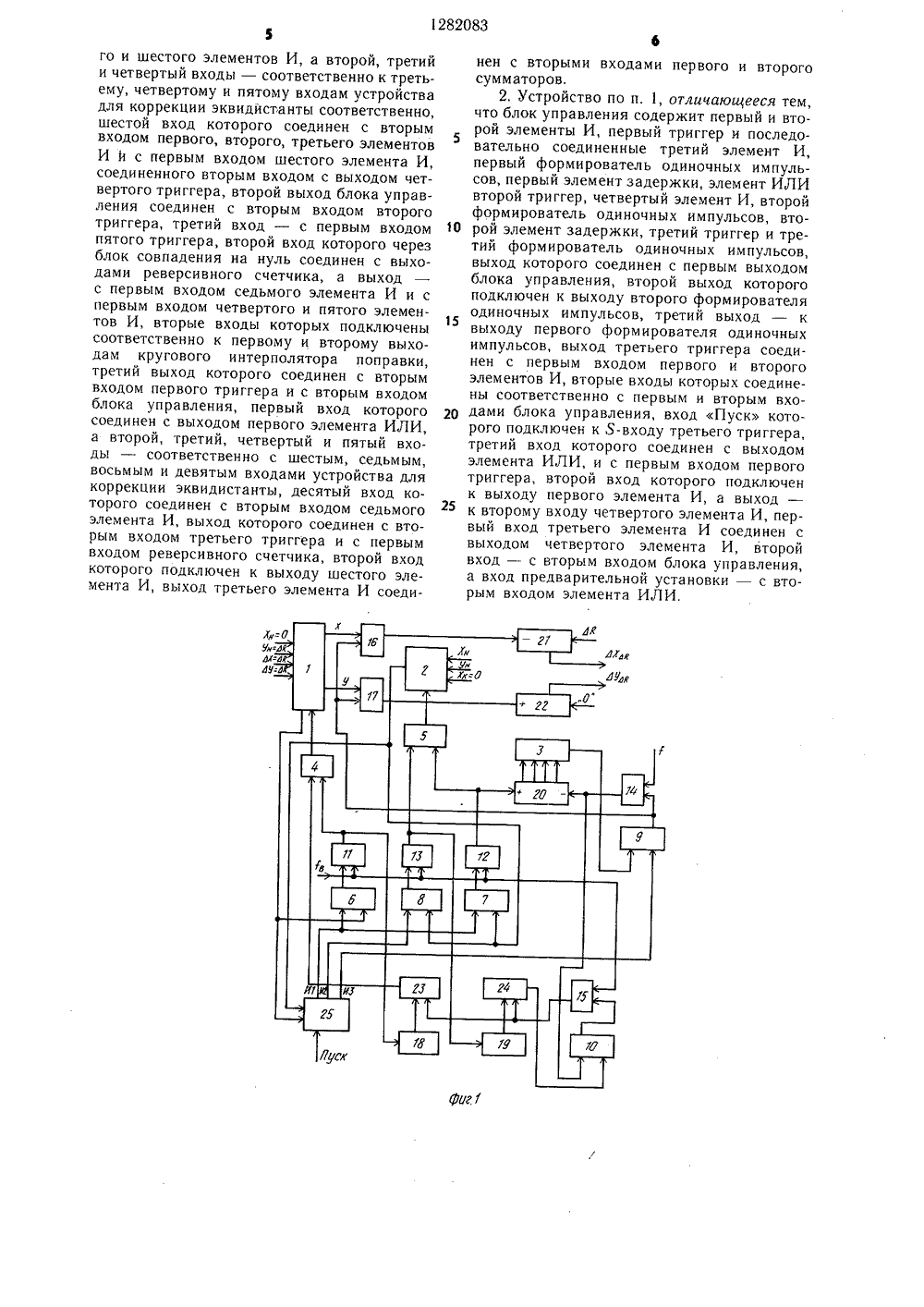
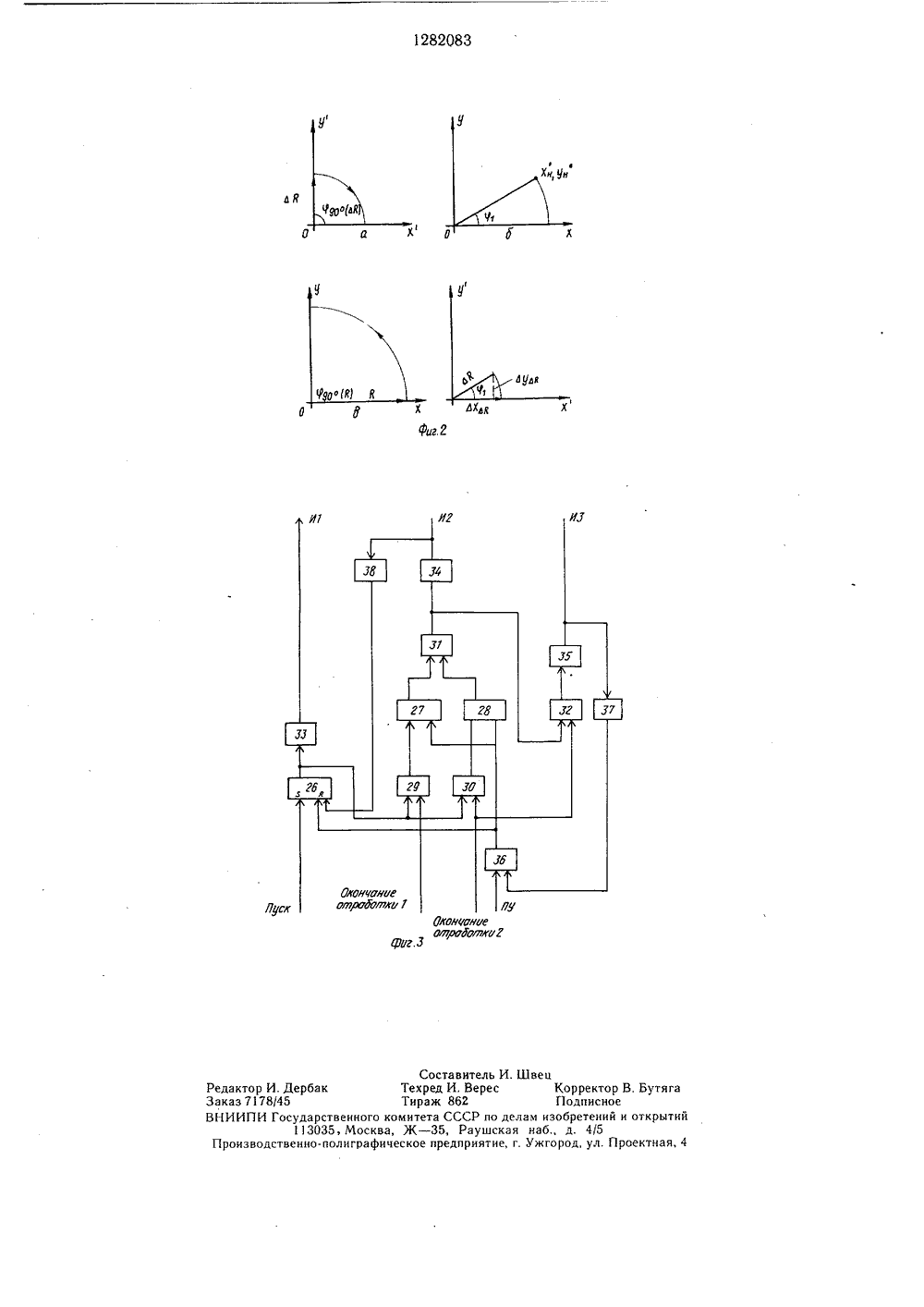
(19) 6 05 В 19/1 ССРРЫТИЙ ОП ЕТЕ Н(56) Левин Б. К. и автоматического ра Сб. статей Способь и интерполяторы для лового управления ст строение, 1970, с. 13Авторское свидете746431, кл. б 05Авторское свидете591822, кл. 6 05 Ю. Методы дистанты. -и программ систем чисМ.: Машино Мальчик Асчета экподготоконтурньанками. -0 - 142.льство СВ 19/18,льство СВ 19/00,Р 8 Р ОРРЕКЦИИ АХ ЧИСЛОГОСУДАРСТВЕННЫЙ НОМИТЕ ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОРСКОМЪ( СВИДЕТЕЛЬСТВУ(54) УСТРОЙ СТВО ДЛ Я ЭКВИДИСТАНТЫ В СИСТ ВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ (57) Изобретение относится к области автоматики и вычислительной техники, в частности к системам ЧПУ станками. Цель - повышение точности коррекции. Устройство содержит круговые интерполяторы поправки и радиуса и схему совпадения. Оба интерполятора построены по принципу цифрового дифференциального анализатора. В устройство введены два элемента ИЛИ, пять триггеров, семь элементов И, пять счетчиков, два накапливаюших сумматора, схема управления и связи между элементами. Интерполятор радиуса работает по импульсам частоты, а интерполятор поправки - по имйульсам высокой частоты. В данном устройстве повышается точность расчета экви- сФ дистанты, упрощается программирование, поскольку отпадает необходимость учета ф р ошибок и их компенсации. 1 з. п. ф-лы, 3 ил. М Ф1Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками.Цель изобретения - повышение точности коррекции.На фиг. 1 изображена структурная схема устройства; на фиг. 2 - графики, поясняющие ее работу; на фиг. 3 - блок управления.Устройство состоит из кругового интерполятора 1 поправки (М), построенного по принципу цифрового дифференциального анализатора (ЦДА), кругового интерполятора 2 радиуса, построенного также по принципу ЦДА, блока 3 совпадения на ноль, элементов ИЛИ 4 и 5, триггеров 6 - 10, элементов И 11 в 17, счетчиков 18 - 22 импульсов, накапливающих сумматоров 23 и 24 блока 25 управления. Причем интерполяторы могут быть построены по любой известной схеме круговых интер пол яторов на ЦДА, Блок 3 совпадения на ноль представляет собой многовходовую схему совпадения, подключенную к счетчику 20 импульсов таким образом, что на ее выходе сигнал возникает при нулевом состоянии счетчика, Счетчик 20 импульсов для простоты выполняют реверсивным, а счетчик 21 импульсов - вычитающим.Блок 25 управления (фиг. 3) состоит из триггеров 26 - 28, элементов И 29 - 32, формирователей 33 - 35 одиночных импульсов (в простейшем случае дифференцирующие цепочки), элемента ИЛИ 36, элементов 37 и 38 задержки.Перед началом работы в круговой ин.- терполятор 1 (фиг. 1) поправки заносятся в качестве начальных данных Хн = О, Ун = = М, ЛХ = Л У = ЛЯ. В круговой интерполятор 2 радиуса заносятся следующие начальные данные Х = Х" Ун = У, У = = 7", а величина ЛХ не заносится, так как она получается автоматически, поскольку при отработке перемещения по координате У на величину ЛУ = У" радиус Я оказывается совмещенным с осью Х. Счетчики 18 - 22 импульсов сбрасываются в ноль. После этого внешним сигналом включают блок 25 управления, сигналы с первого выхода устанавливает в 1 триггеры 6 и 7,Триггер 6, устанавливаясь в 1, открывает элемент И 11, и импульсы высокой частоты ь через элемент И 11 и элемент ИЛИ 4 начинают поступать на вход аргумента кругового интерполятора 1 поправки и на вход счетчика 18 импульсов, который подсчитывает их количество, Когда радиус- вектор поворачивается на 90 и совмещается с осью Х (фиг. 2 а), в счетчике 18 импульсов оказывается число, соответствующее углу 90 для конкретного значения поправки М. При этом вырабатывается в интерполяторе 1 сигнал окойчания отработки, который сбрасывает в О триггер 6. Одновременно 5 О 5 20 25 30 35 40 45 50 55 с выхода элемента И 12, открытого единичным сигналом триггера 7, импульсы частоты ь начинают поступать на вход реверсивного счетчика 20 и через элемент ИЛИ 5 - на вход аргумента кругового интерполятора 2 радиуса, Круговой интерполятор 2 радиуса начинает осуществлять интерполяцию в сторону ближайшей оси (для случая, изображенного на фиг. 2 б, в сторону оси Х).Интерполяция продолжается до тех пор, пока радиус-вектор Я не совпадет с осью Х, что определяется по нулевому состоянию регистра подынтегральной функции координаты Х интерполятора 2 или по числу шагов, выданных по координате У, которая в этом случае равна У" . Когда радиус-вектор Р совмещается с осью Х, в интерполяторе 2 вырабатывается сигнал окончания отработки, который сбрасывает триггер 7 в нулевое состояние. К этому моменту в реверсивном счетчике 20 код численно равен р, но угловая величина единицы этого кода в общем случае не совпадает с угловой величиной единицы кода рю(ЛЯ) в счетчике 18. После получения обоих сигналов окончания блок 25 управления формирует импульс на втором выходе, который устанавливает в состояние 1 триггер 8. В результате открывается элемент И 13, и с его выхода импульсы частоты ь поступают на вход счетчика 19 импульсов и через элемент ИЛИ 5 - на вход аргумента интерполятора радиуса, в котором после поворота радиуса-вектора(Х, У" ) на величину р получаются следующие данные: Хн = Р, Ун= 0, ЛХ= =ЛУ = Я.Таким образом импульсы аргумента, поступая на вход интерполятора, заставляют его отрабатывать дугу 90 радиуса Я. Направление поворота радиуса-вектора при этом значения не имеет (на фиг. 2 в показан поворот радиуса К против часовой стрелки). Когда радиус Я совмещается с осью У, отработка его заканчивается, подобно предыдущему случаю, в счетчике 19 импульсов оказывается число рм(Я), равное 90 для данного значения радиуса, причем в общем случае число р (К) у;(аК), что означает что угловая цена импульсов аргумента интерполятора поправки и интерполятора 2 радиуса не одинакова и зависит от соотношения величин ЛР и Р. Интерполятор 2 радиуса вырабатывает сигнал Окончание отработки, который выключает триггер 8, и поступает на вход блока 25 управления, который вырабатывает сигнал на третьем выходе. Этот сигнал устанавливает в 1 триггер 9, в результате чего частотас выхода элемента И 14 начинает поступать на вычитающий вход реверсивного счетчика 20 и на единичный вход триггер 10. Триггер 1 О переключается в состояние 1 и открывает своим единичным входом элемент И 15. В результате импульсы высокой частоты ь начинают поступать на суммирующие входы на 12820833капливающих сумматоров 23 и 24, причем сумматор 23 складывает величину р 90(ЛР), а сумматор 24 - величину ср 90(Й).Импульсы переполнения сумматора 23 через элемент ИЛИ 4 поступают на вход аргумента интерполятора 1 поправки, выходные сигналы по координатам Х и У которого через элементы И 16 и 17, открытые единичным сигналом триггера 9, поступают на нулевой вход триггера 10 и сбрасывают его в нуль, при этом закрывается элемент И 15. 10 Таким образом, частоты импульсов на нулевом и единичном входах триггера 10 равны, что всегда возможно, когда ь). Следующий импульс с выхода элемента И 14 вновь устанавливает в 1 триггер 10, и цикл продолжается до тех пор, пока реверсивный счетчик 20 не приходит в нулевое состояние и блок совпадения на нуль не сбрасывает в нуль триггер 9. Вычисление поправок закончено, причем проекция ЛР на ось ХЛХлк оказывается в счетчике 21, а проекция ЛР на ось УЛУх оказывается в счетчике 22 импульсов.Точность определения поправки в предлагаемом устройстве значительно выше, чем в известном, так как угловая цена импульсов аргумента интерполятора поправки и интер полятора радиуса выравнивается. Действительно, элементы 18 - 24 и 10 и 15 представляют собой двухкоординатный линейный интерполятор с обратной связью, который решает следующую пропорцию:30Ь Ч 090(И)аЧ 090(Р)За единицу количество импульсов на выходе переполнения сумматора 23 равно количеству импульсов на единичном входе триггера 10, умноженному на отношение ф 90 (ЛВ-- . Тогда, если на единичный вход тригР 90гера 10 подают ср 90(Я) импульсов, на вход аргумента интерполятора поправки приходит ф 90 (ЛР) импульсов, так как; -Р 90 Я) = ч 90(ЛР).90 (И)Ч 90 (Й)Следовательно, вектор ЛР в интерполя торе 1 поправки за время прихода на единичный вход триггера 101, импульсов поворачивается точно на угол ь а на его вход приходит числЬ импульсов, равное=-- ( -Благодаря этому предлагаемоеГ 090(И)90 (Й)устройство вычисляет поправки без погрешностей, которые вызываются несовпадением угловой цены импульсов аргумента обоих интерполяторов. Круговые интерполяторы могут быть выполнены по любой известной схеме, действующей по принципу цифрового дифференциального анализатора (ЦДА). Блок управления работает следующим образом.По сигналу предварительной установки (ПУ) триггеры 26 - 28 устанавливаются в нулевое состояние. Сигнал Пуск устаннавливает триггер 26 в состояние 1, при этом на входах элементов И 29 и 30 появляется разрешающий потенциал, а на выходе формирователя 33 появляется импульс И 1. С приходом сигнала окончания отработки с выхода интерполятора 1 поправки он, пройдя через элемент И 29, устанавливает в 1 триггер 27. С приходом сигнала окончания отработки с выхода интерполятора 2 радиуса срабатывает элемент И 30 и устанавливает в 1 триггер 28. Теперь срабатывает элемент И 31, его выходной сигнал поступает на вход элемента И 32 и на вход формирователя 34. на выходе которого появляется импульс И 2, который поступает в устройство, а через элемент 38 задержки сбрасывает триггер 26 в О. С приходом следуюгцего сигнала Окончание отработки с выхода интерполятора 2 радиуса он проходит через элемент И 32. Формирователь 35 формирует импульс ИЗ, который через элемент 37 задержки и элемент ИЛИ 36 сбрасывает в нуль все триггеры. Цикл окончен.формула азооретенан1. Устройство для коррекции эквцдистанты в системах числового программного управления, содержащее круговой интерполятор поправки, круговой ицтерполятор радиуса и блок совпадения на нуль, от.ганаюиееея тем, что, с целью повышения точности коррекции, в устройство введены блок управления, последовательно соединснцыс первый триггер. первый элемент И, первый счетчик импульсов, первый сумматор и первый элемент ИЛИ, а также последовательно соединенные второй трипер, второй элемент И, второй счетчик импульсов, второй сумматор, третий триггер и третий элемент И, а также реверсивный счетчик, четвертый и пятый триггеры, четвертый, пятый, шестой и седьмой элементы И, второй элемент ИЛ 11, третий и четвертый счетчики импульсов, первые входы которых подключены соответственно к первому и к второму входам устройства для коррекции эквидистанты, выходы соответственно к первому и второму выходам устройства для коррекции эквцдистанты в системах числового программного управления, вторые входы - к выходам четвертого и пятого элементов И соответственно, первый выход блока управления подключен к первому входу первого триггера и к первому входу четвертого триггера, второй вход которого соединен с первым входом второго триггера, с первым входом блока управления и с выходом кругового интерполяторд радиуса, первыи вход которого подключег через второй элемент ИЛИ к выходам второ 282083го и шестого элементов И, а второй, третий и четвертый входы - соответственно к третьему, четвертому и пятому входам устройства для коррекции эквидйстанты соответственно, шестой вход которого соединен с вторым входом первого, второго, третьего элементов И й с первым входом шестого элемента И, соединенного вторым входом с выходом четвертого триггера, второй выход блока управления соединен с вторым входом второго триггера, третий вход - с первым входом пятого триггера, второй вход которого через блок совпадения на нуль соединен с выходами реверсивного счетчика, а выход с первым входом седьмого элемента И и с первым входом четвертого и пятого элементов И, вторые входы которых подключены соответственно к первому и второму выходам кругового интерполятора поправки, третий выход которого соединен с вторым входом первого триггера и с вторым входом блока управления, первый вход которого соединен с выходом первого элемента ИЛИ, а второй, третий, четвертый и пятый входы - соответственно с шестым, седьмым, восьмым и девятым входами устройства для коррекции эквидистанты, десятый вход которого соединен с вторым входом седьмого элемента И, выход которого соединен с вторым входом третьего триггера и с первым входом реверсивного счетчика, второй вход которого подключен к выходу шестого элемента И, выход третьего элемента И соединен с вторыми входами первого и второго сумматоров.2. Устройство по п. 1, отличающееся тем,что блок управления содержит первый и второй элементы И, первый триггер и последовательно соединенные третий элемент И, первый формирователь одиночных импульсов, первый элемент задержки, элемент ИЛИ второй триггер, четвертый элемент И, второй формирователь одиночных импульсов, вто рой элемент задержки, третий триггер и третий формирователь одиночных импульсов, выход которого соединен с первым выходом блока управления, второй выход которого подключен к выходу второго формирователя 15одиночных импульсов, третий выход - к выходу первого формирователя одиночных импульсов, выход третьего триггера соединен с первым входом первого и второго элементов И, вторые входы которых соединены соответственно с первым и вторым вхо О дами блока управления, вход Пуск которого подключен к Я-входу третьего триггера, третий вход которого соединен с выходом элемента ИЛИ, и с первым входом первого триггера, второй вход которого подключен к выходу первого элемента И, а выход - к второму входу четвертого элемента И, первый вход третьего элемента И соединен с выходом четвертого элемента И, второй вход - с вторым входом блока управления, а вход предварительной установки - с вторым входом элемента ИЛИ.1282083 фиг.2 Пус Составит Техред И. В Тираж 862 енного комитета ССС Москва, Ж - 35, Ра лиграфическое предпрль И. Шврес тии Р по делам изушская наб.ятие, г. Ужг Редактор И. ДербакЗаказ 7178/45ВНИИПИ Государств113035Производственно-по Оконооное оогрооолюгг.3 орректор В. БутягПодписноебретений и открьд. 4/5од, ул. Проектная
СмотретьЗаявка
3919667, 01.07.1985
ЛЕНИНГРАДСКОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ЭЛЕКТРОАВТОМАТИКА"
КУЗЬМИН ГЕННАДИЙ ЯКОВЛЕВИЧ, КОШКИН ВЛАДИМИР ЛЬВОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: коррекции, программного, системах, числового, эквидистанты
Опубликовано: 07.01.1987
Код ссылки
<a href="https://patents.su/5-1282083-ustrojjstvo-dlya-korrekcii-ehkvidistanty-v-sistemakh-chislovogo-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для коррекции эквидистанты в системах числового программного управления</a>
Многоканальный формирователь импульсов со счетным входом

Номер патента: 1793533
Опубликовано: 07.02.1993
Авторы: Алексеев, Ведерников, Камышный
МПК: H03K 3/72
Метки: входом, импульсов, многоканальный, счетным, формирователь
...короткозамкнутой структурысоставляет единицы или десятки миллионов), На транзистор 4, как и ранее, напряжение не подается.Приход на базы транзисторов следующего управляющего импульса открываеттранзистор 3, что, в конечном счете, приводит к трансформации его структуры с токопроводящей перемычки за счет энергии,накопленной на конденсаторе 8 за времямежду срабатыванием пирозапала 5 и приходом второго управляющего импульса.Следствием является подрыв пирозапала б,Формирователь оказывается подготовленным к следующему, третьему, циклу работы.К началу третьего цикла работы напряжениеисточника 10 подается на транзистор 4 через короткозамкнутые структуры транзисторов 2 и 3. При поступлении следующегоуправляющего импульса открывается тран-...
Многоустойчивый элемент памяти со счетным входом

Номер патента: 465655
Опубликовано: 30.03.1975
Авторы: Закроищиков, Останков
МПК: G11C 11/00
Метки: входом, многоустойчивый, памяти, счетным, элемент
...и третьей групп, а управляющая шина 25 соединена с одним из входов каждого логического элемента И - НЕ второй группы.На чертеже приведена логическая схемамногоустойчивого элемента памяти со счетным входом, где 1, 2, 3 - логические схемы 0 И - НЕ первой группы; 4, 5, 6 - логичеЛогические состояния схем (И - НЕ Выход элементов И - НЕ Значениена шинеГИ 3 4 5 б О 1 1 1 О О Во избежание состязаний выход схемы И - НЕ 2 соединен с входом схемы И - НЕ 3, Соединение каждой схемы И - НЕ второй группы большого номера со схемой И - НЕ этой же группы, но номер которой на единицу меньше, препятствует двойному срабатыванию устройства за время одного импульса счета.На чертеже шина установки начального состояния условно не показана. Она должна быть...
Триггер со счетным входом

Номер патента: 978327
Опубликовано: 30.11.1982
МПК: H03K 3/286
Метки: входом, счетным, триггер
...выходам второго й 5-триггера и к входу установки в нуль, а выход соединен с третьим единичным входом третьего КБ-триггера, второй и третий входы второго дополнительного элемента подключены соответственно к счетному входу и единичному выходу первого ЙЭ-триггера а выходвторого дополнительного элемента соединен с нулевым входом второго К 5-триггера,На чертеже представлена схема триггера со счетным входом,Устройство содержит элементы И-НЕ1-9, счетный вход 10, при этом вход11 установлен в единицу, вход 12 установлен в нуль, элементы 1 и 2 образуютпервый РБ триггер, элементы 3 и 4 -второй Р 5-триггер а элементы 5 и 6 -третий й-триггер 7-9 - дополнительновведенные элементы, на схемах установки в нуль и единицу присутствуют единичные...
Триггер с раздельными входами

Номер патента: 278207
Опубликовано: 01.01.1970
Метки: входами, раздельными, триггер
...клеммы 13 подключены к электрическим контактам 14, установленным в элементах и взаимодействующим с пружинными контактами 15, закрепленными на перемещающихся концах пластин 9.Сопловая камера элемента 1 соединена с управляющей камерой элемента 2 и с первым выходным каналом, а сопловая камера элемента 2 соединена с управляющей камерой элемента 1 и со вторым выходным каналом.Устройство работает следующим ооразом.При среднем положении переключателя 12 сопла питания 7 в обоих элементах закрыты. Выходные сигналы Ры, =Рвы., =О.При включении переключателя нагревается биметаллическая пластина соответствующего элемента и, прогибаясь, открывает его сопло питания. Давление питания поступает в камеру 4 другого элемента. При этом его мембрана...
Электропневматический триггер с двумя входами

Номер патента: 288408
Опубликовано: 01.01.1970
Авторы: Сооружений, Управление, Шпиз
МПК: G06D 7/00
Метки: входами, двумя, триггер, электропневматический
...б, соедщ 1 еццой с преобразователем 7. Обций провод питания, подключенный к клемме 8, последовательно сосдицец через блокирующие преобразователи 9 и 10 с преобразователями б и 7. 5 Устройство рдботаст следуопим образом,Электрсеки 1 сигцдл Включить подастсяк клемме 4. При этом включается элсктрох 1 гит электроицевмоцреобразоватсля 5, электрическая цсиь которого проходит через ц. з. коц- О ткт ццсВмоэлектро 11 эеобразоватсля 10 и эдмыкающ ися при наличии ддвлеиия цитдция котакт писгхОэлсктропреобр;1 зоватсля 9. Выходой сигцал от преобразователя 5 проходит Срез элемент 2, выцолця 1 оцигй логическу 1 о 5 операци 1 О 11 Л 11, в верхцюк управляющу 1 Окамеру реле 1. Послсдцее срабатывает и остае 1 ся во вклОчсццом состояц 1 ш за счет...
Предыдущий патент: Устройство для коррекции эквидистанты
Следующий патент: Линейный интерполятор
Случайный патент: Устройство для определения поверхност-ного натяжения жидкостей