Способ управления процессом драгирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1105556
Авторы: Иванова, Суздальницкий, Цирер
Текст
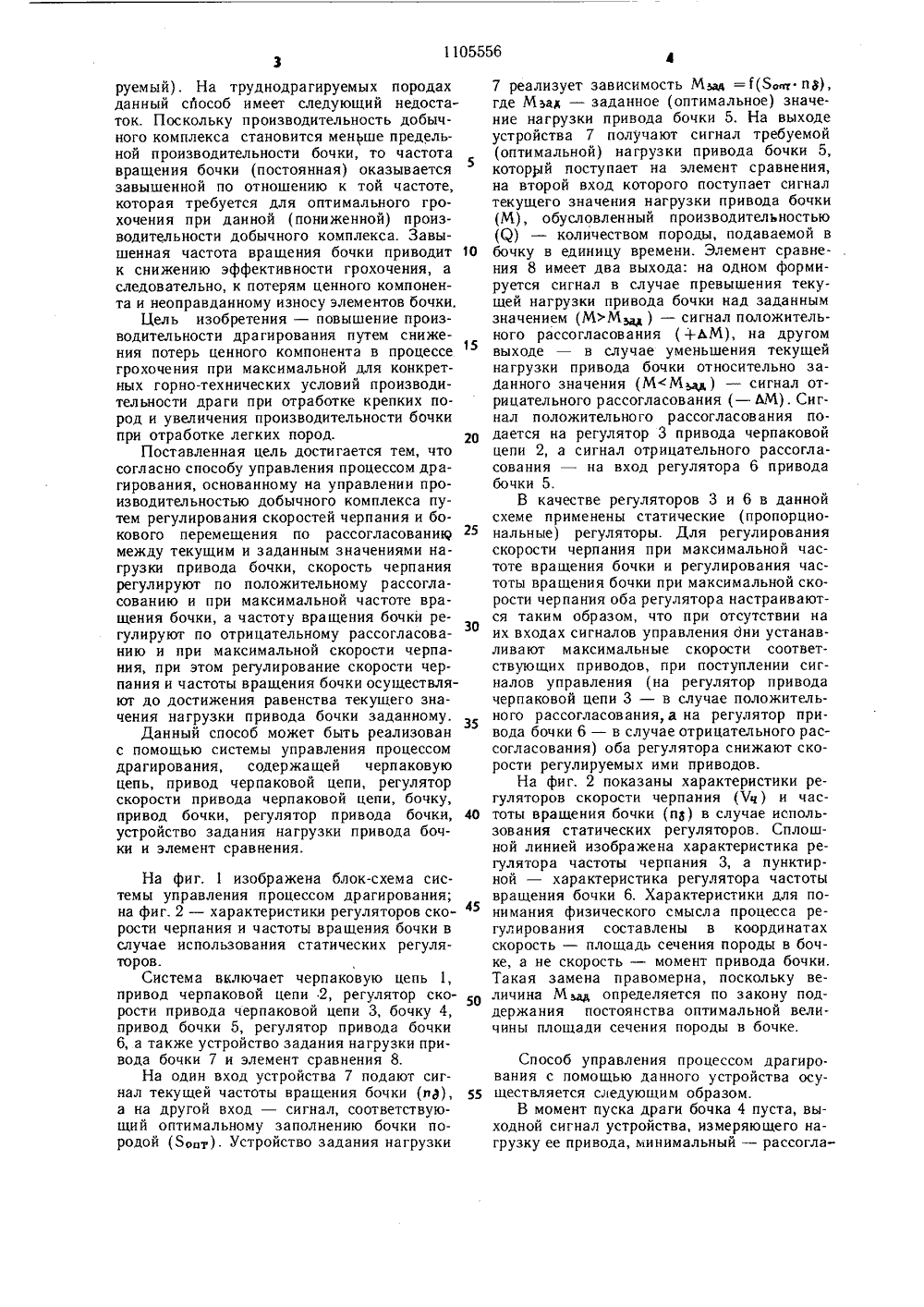
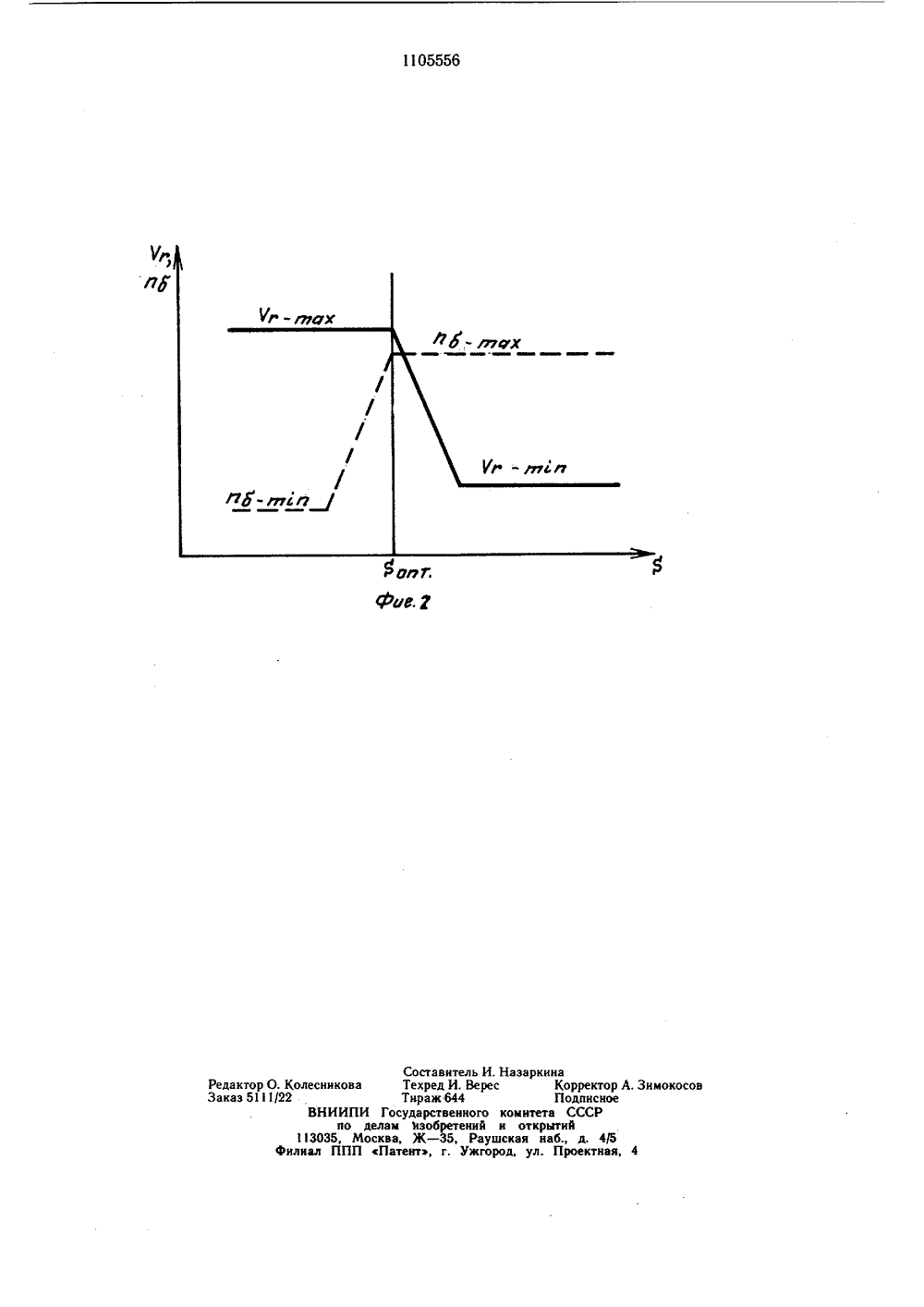
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКРЕСПУБЛИК в Е 02 РЗ Ь ,уды д йл т;. ,. 131ВНЬЛИОЩ 1,; НИЕ ИЗОБРЕТЕНИ ЛЬСТВУ фи ОСУДАРСТВЕННЫЙ НОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ АВТОРСКОМУ СВИ(56) 1. Зубков О. В., Каспин Т. Е. и др, Оптимальное управление драгой с применением управляющих вычислительных машин. Производственно-технический бюллетень ПО Северовостокзолото. Магадан, Колыма, 1968,12, с, 21 - 26.2. Лыков Н. Б., Ляндрес Г, В., Царегородцева М. Е. Опыт работы системы автоматического регулирования добычного комплекса драги ДК-1 М с приводом черпаковой цепи повышенной мощности, Производственно-технический бюллетень ПО Северовостокзолото, Магадан, Колыма, 1976,6, с. 30 - 32 (прототип). ЯО 11055(54) (57) СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ДРАГИРОВАНИЯ, основанный на управлении производительностью добычного комплекса путем регулирования скоростей черпания и бокового перемещения по рассогласованию между текущим и заданным значениями нагрузки привода бочки, отличающийся тем, что, с целью повыппения производительности драгирования, скорость черпания регулируют по положительному рассогласованию и при максимальной частоте вращения бочки, а частоту вращения бочки регулируют по отрицательному рассогласованию и при максимальной скорости черпания, при этом регулирование скорости черпания и частоты врагцения бочки осуществляют до достижения равенства текущего значения нагрузки привода бочки а задан ному.1105556 51 О15 20 25 30 35 40 45 50 55 Изобретение относится к области горной техники и может быть использовано при управлении многочерпаковыми драгами.Предельная производительность добычных комплексов современных драг различна и зависит от класса крепости отрабатываемых пород. Каждому классу крепости пород соответствует своя предельная производительность добычного комплекса драги. Обогатительноеоборудование, например бочка имеет предельную производительность, зависящую от конструктивных параметров, гранулометрического состава пород, их мывкости, но не зависящую от их крепости. Частота вращения бочки может быть постоянной либо регулируемой.При отоаботке легкодрагируемых пород предельная производительность добыч ного комплекса превышает предельную производительность обогатительного оборудования, в частности бочки. Оператору драги при этом в целях предотвращения потерь ценного компонента при обогащении необходимо уменьшить производительность добычного комплекса до значения, соответствующего предельной производительности бочки.При отработке труднодрагируемых (крепких) пород предельная производительность добычного комплекса оказывается ниже предельной производительности бочки. Оператору в этом случае необходимо отрегулировать режим работы бочки таким образом, чтобы при предельной производительности добычного комплекса обеспечить оптимальное грохочение породы. Известен способ управления процессом дра гиоования, предназначенный для управления драгами, оснащенными бочками с регулируемым приводом, заключающийся в том, что определяют класс крепости отрабатываемых пород, измеряют фактические параметры процесса, в т. ч. производительность, скорости черпания и бокового перемещения драги, а также частоту вращения бочки, сравнивают измеренные параметры с заранее определенными для этого класса крепости величинами (в блок памяти управляющего устройства заложены средние для каждого класса крепости значения параметров процесса драгирования: производительности, скоростей черпания и бокового перемещения драги, частоты вращения бочки), при расхождении фактических параметров с запрограммированными, а также при зафиксированном изменении класса крепости пород корректируют измеренные параметры до выравнивания с заданными. Таким образом, данный способ обеспечивает регулирование режимов работы добычного и обогатительного комплексов по одному возмущающему воздействию - крепости пород 11.Однако породы одинаковой крепости могут иметь различный ситовой (гранулометрический) состав, разные показатели мывкости и другие характеристики, Так, например, при увеличении содержания крупной фракции увеличивается количество породы в бочке, а заданная (средняя) частота вращения бочки оказывается заниженной против требуемой для оптимального грохочения, что приводит к повышенным потерям ценного компонента. В этом случае частота вращения бочки должна быть увеличена, а программой, заложенной в блок памяти, это не предусмотрено. В ряде случаевнапример при отработке легко драгируемых пород, частота вращения бочки не может быть увеличена, так как уже находится на верхнем пределе. Тогда должна быть уменьшена производительность добычного комплекса, что также не предусмотрено программой управления (в блок памяти заложено среднее для данного класса крепости значение производительности), При увеличении содержания мелкой фракции, которая быстро просеивается через перфорацию сеющих листов бочки, заданная (средняя) частота вращения бочки оказывается завышенной, что также приводит к увеличению потерь ценного компонента и одновременно к неоправданному износу элементов бочки. В этом случае можно было бы увеличить производительность добычного комплекса, однако заданное (среднее) значение ее не является максимально возможным и не позволяет этого сделать. Таким образом, однозначно определенные и заданные программой средние для каждого класса крепости значения производительности добычного комплекса и частоты вращения бочки не позволяют оптимизировать процесс извлечения ценного компонента при изменении гранулометрического состава разрабатываемых пород. Аналогичная ситуация наблюдается и при изменении других горно- технических показателей пород.Кроме того, установка вычислительной техники на драге усложняет систему управления и в настоящее время нерентабельна. Отсутствуют также серийно изготавливаемые датчики крепости пород, необходимые для реализации данного способа управления. Наиболее близким к предложенному по технической сущности и достигаемому результату является способ управления процессом драгирования, основанный на управлении производительностью добычного комплекса путем регулирования скоростей черпания и бокового перемещения по рассогласованию между текущим и заданным значениями нагрузки привода бочки 12.На легкодрагируемых породах недостаток способа заключается в том, что производительность бочки значительно ниже производительности добычного комплекса и не может быть увеличена, так как частота вращения ее постоянна (привод нерегулиНа фиг. 1 изображена блок-схема системы управления процессом драгирования; на фиг. 2 - характеристики регуляторов скорости черпания и частоты вращения бочки в случае использования статических регуляторов.Система включает черпаковую цепь 1, привод черпаковой цепи 2, регулятор скорости привода черпаковой цепи 3, бочку 4, привод бочки 5, регулятор привода бочки 6, а также устройство задания нагрузки привода бочки 7 и элемент сравнения 8.На один вход устройства 7 подают сигнал текущей частоты вращения бочки (лд), а на другой вход - сигнал, соответствующий оптимальному заполнению бочки породой (Ят). Устройство задания нагрузки 45 50 55 руемый) . На труднодрагируемых породах данный сйособ имеет следующий недостаток. Поскольку производительность добычного комплекса становится меньше предельной производительности бочки, то частота вращения бочки (постоянная) оказывается завышенной по отношению к той частоте, которая требуется для оптимального грохочения при данной (пониженной) производительности добычного комплекса. Завышенная частота вращения бочки приводит 10 к снижению эффективности грохочения, а следовательно, к потерям ценного компонента и неоправданному износу элементов бочки,Цель изобретения - повышение производительности драгирования путем снижения потерь ценного компонента в процессе грохочения при максимальной для конкретных горно-технических условий производительности драги при отработке крепких пород и увеличения производительности бочки при отработке легких пород. 20Поставленная цель достигается тем, что согласно способу управления процессом драгирования, основанному на управлении производительностью добычного комплекса путем регулирования скоростей черпания и бокового перемешения по рассогласованик между текущим и заданным значениями нагрузки привода бочки, скорость черпания регулируют по положительному рассогласованию и при максимальной частоте вращения бочки, а частоту вращения бочки регулируют по отрицательному рассогласованию и при максимальной скорости черпания, при этом регулирование скорости черпания и частоты врашения бочки осуществляют до достижения равенства текущего значения нагрузки привода бочки заданному.Данный способ может быть реализован с помощью системы управления процессом драгирования, содержащей черпаковую цепь, привод черпаковой цепи, регулятор скорости привода черпаковой цепи, бочку, привод бочки, регулятор привода бочки, 40 устройство задания нагрузки привода бочки и элемент сравнения. 7 реализует зависимость Ммд = 1(г п 8), где Мзах - заданное (оптимальное) значение нагрузки привода бочки 5. На выходе устройства 7 получают сигнал требуемой (оптимальной) нагрузки привода бочки 5, который поступает на элемент сравнения, на второй вход которого поступает сигнал текушего значения нагрузки привода бочки (М), обусловленный производительностью (Я) - количеством породы, подаваемой в бочку в единицу времени. Элемент сравнения 8 имеет два выхода: на одном формируется сигнал в случае превышения текущей нагрузки привода бочки над заданным значением (ММ ) - сигнал положительного рассогласования (+АМ), на другом выходе - в случае уменьшения текущей нагрузки привода бочки относительно заданного значения (ММд) - сигнал отрицательного рассогласования ( - ЬМ) . Сигнал положительного рассогласования подается на регулятор 3 привода черпаковой цепи 2, а сигнал отрицательного рассогласования - на вход регулятора 6 привода бочки 5.В качестве регуляторов 3 и 6 в данной схеме применены статические (пропорциональные) регуляторы. Для регулирования скорости черпания при максимальной частоте врашения бочки и регулирования частоты врашения бочки при максимальной скорости черпания оба регулятора настраиваются таким образом, что при отсутствии на их входах сигналов управления дни устанавливают максимальные скорости соответствующих приводов, при поступлении сигналов управления (на регулятор привода черпаковой цепи 3 - в случае положительного рассогласования,а на регулятор привода бочки 6 - в случае отрицательного рассогласования) оба регулятора снижают скорости регулируемых ими приводов.На фиг. 2 показаны характеристики регуляторов скорости черпания (Чч) и частоты врашения бочки (пх) в случае использования статических регуляторов. Сплошной линией изображена характеристика регулятора частоты черпания 3, а пунктирной - характеристика регулятора частоты вращения бочки 6. Характеристики для понимания физического смысла процесса регулирования составлены в координатах скорость - площадь сечения породы в бочке, а не скорость - момент привода бочки. Такая замена правомерна, поскольку величина М определяется по закону поддержания постоянства оптимальной величины площади сечения породы в бочке.Способ управления процессом драгирования с помощью данного устройства осуществляется следующим образом.В момент пуска драги бочка 4 пуста, выходной сигнал устройства, измеряющего нагрузку ее привода, минимальный - рассогла 11 сование на выходе элемента сравнения 8 отрицательное, максимальное. Поступая на вход регулятора привода бочки 6, этот сигнал обеспечивает работу бочки при минимальной частоте вращения, а скорость черпания устанавливается максимальная. По мере наполнения бочки 4 породой выходной сигнал элемента сравнения 8 уменьшается и при 5=Явд становится равным нулю, Регулятор 6 начинает повышать частоту врагцения бочки, стремясь ее установить на максимальном уровне, но по мере увеличения частоты вращения бочки площадь сечения породы в бочке уменьшается.Если в это время отрабатываются крепкие породы, то предельно возможный коэффициент наполнения черпаков относительно мал и,следовательно, количество породы, подаваемое черпаками в бочку, даже при максимальной скорости черпания сравнительно мало. Скорость черпания при отработке крепких пород устанавливается на верхнем пределе - Уча, равенство площади сечения породы в бочке заданному Я=Ьза устанавливается изменением частоты вращения бочки п 8.При 7 ч =Чч, производительность драги максимально возможная (,Ьпах), а установленная частота вращения бочки п 8 обеспечивает оптимальное грохочение, следовательно, снижение потерь ценного компонента.Если в момент пуска отрабатываются легкие породы, то коэффициент наполнения черпаков становится значительно большим, породы в бочку поступает значительно больше, а при Ъч оно превышает предельную производительность бочки. Когда бочка пуста, регулятором привода черпаковой цепи 3 также устанавливается максимальная скорость черпания, а регулятором приво да бочки 6 - минимальная частота вращения бочки. По мере заполнения бочки величина отрицательного рассогласования уменьшается, частота вращения бочки увеличивается и после достижения равенства Я = Яза и верхнего предела регулирования частоты вращения бочки п, при дальнейшем увеличении количества подаваемой породы знак05556 40 5 10 15 20 25 30 35 рассогласования меняет полярность - появляется положительное рассогласование. При положительном рассогласовании частота вращения постоянна и максимальна, что обеспечивает максимальную производительность бочки в этих условиях, а регулятор скорости привода черпаковой цепи 3 снижает скорость черпания до достижения равенства 3=34, поддерживая оптимальное грохочение и минимизируя потери ценного компонента.Изменение ситового (гранулометрического) состава, Если при работе на максимальной частоте вращения бочки и промежуточных значениях скорости черпания ситовой состав изменится в сторону увеличения содержания мелкой, быстропросеиваемой фракции (или уменьшится накопление черпаков, например, в углах забоя, которое может быть скомпенсировано увеличением скорости черпания), то это приведет к временному уменьшению площади сечения породы в бочке и возникновению отрицательного рассогласования, Предусмотренная последовательность операций управления приведет сначала к увеличению скорости черпания до восстановления равенства Я = зад без понижения частоты вращения бочки. И только в том случае, если увеличения скорости черпания до максимального значения окажется недостаточным для этого, то последует уменьшение частоты вращения бочки. Производительность окажется по-прежнему на максимально возможном уровне,.поскольку скорость черпания будет равна максимальному значению, а оптимальность грохочения обеспечится регулированием частоты вра,цения бочки и т. д. при других изменениях горно-технических условий драгирования.Эффективность способа заключается в том, что он позволяет без увеличения потерь ценного компонента увеличить верхний предел изменения частоты вращения бочки и повысить производительность драги при отработке пород тех классов крепости, где ранее она сдерживалась допустимой производительностью бочки.11055560 олт. фие, УСоставитель И. Назаркина Редактор О. Колесникова Техред И. Верес Корректор А. Зимокосов Заказ 511 Ц 22 Тираж 644 Подписное ВНИИПИ Государственного комитета СССРпо делам изобретений н открытий113035, Москва, Ж - 35, Раушская наб., д. 4/5филиал ППП Патент, г, Ужгород, ул. Проектная, 4
СмотретьЗаявка
3558453, 28.02.1983
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ЗОЛОТА И РЕДКИХ МЕТАЛЛОВ
СУЗДАЛЬНИЦКИЙ МИХАИЛ ЛЬВОВИЧ, ИВАНОВА ИРИНА ВЛАДИМИРОВНА, ЦИРЕР АКОШ
МПК / Метки
МПК: E02F 3/16
Метки: драгирования, процессом
Опубликовано: 30.07.1984
Код ссылки
<a href="https://patents.su/5-1105556-sposob-upravleniya-processom-dragirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления процессом драгирования</a>
Устройство для защиты от недопустимой частоты вращения электродвигателя привода шпинделя тяжелого балансировочного станка

Номер патента: 1092645
Опубликовано: 15.05.1984
МПК: H02H 7/093
Метки: балансировочного, вращения, защиты, недопустимой, привода, станка, тяжелого, частоты, шпинделя, электродвигателя
...двигателя) от сети в случае превьппения допустимой частоты вращения.При работе во второй зоне отсчет показаний оборотов шпинделя ведется по второй шкале; а положение светофильтра фотоконтактного устройства остается неизменным, что позволяет без перенастройки применять схему в двухзонном приводе 23.Однако отсутствие контроля работоспособности схемы снижает надежность работы данного устройства.Целью изобретения является повышение надежности путем контроля работоспособности блока сигнализации.Цель достигается тем, что устройство для защиты от недопустимой частоты вращения электродвигателяпривода шпинделя тяжелого балансировочного станка, содержащее контактный измерительный прибор, вход которого через регулирующий элемент подключен к...
Цифровой регулятор скорости вращения электрического привода

Номер патента: 495649
Опубликовано: 15.12.1975
МПК: G05D 13/00
Метки: вращения, привода, регулятор, скорости, цифровой, электрического
...6. Затем происходит измерение длительности )ц)тервяла времени, пропорццоц; льпого скорости вращения, посредством псдсчета в СЧ 10 суммарного числа импульсов, введенных параллельным кодом из блока задания 9 и приходящих за измеряемый интервал от кварцевого генератора 4, Измсрспие заканчивается с приходом 1 пульса дрхгого регистрирующего устройства датчик скорости ца вход формирователя 7. Прт: этом фОрХИруЕТС 5( заДНИЙ фрОНТ ИЗМср 5(сл;030 Иц. тсрвала. Одновременно в логической схеме 8 фсръИруется импульс контроля состояцц 51 СЧ 10 выбранному диапазону рсгулцровгцпи в цифровой форме, т. е. суммарному числу импульсов в СЧ 10 (9910 - 9965). Если такого соответствия нет, то блок 13 поиска диапазо ця устанавливает две младшие декады СЧ...
Устройство для защиты от превышения допустимой частоты вращения электродвигателя привода главного движения станка

Номер патента: 1224895
Опубликовано: 15.04.1986
Авторы: Зусман, Макаревич, Черток
МПК: H02H 7/093
Метки: вращения, главного, движения, допустимой, защиты, превышения, привода, станка, частоты, электродвигателя
...УРОВЕНЬ 11 цс.РЯЖЕНИЯ.При ВК:11 ОЧЕНИИ Привода ПО .",ЕрЕ УВЕЛИ- чения частоты Вращения увелисивается напряжение на выходе датчика,3 числа оборотов, световой указатель перемещается цо шкале вправо. ВтороЙ фоторезистор затемцяется, ца выходе второго канала блока 5 сигьализации появляется низкий;рове 11 ь напряжения. На входе инвертора 10 и на первом входе элемента ЗИ 12, связанных с выходом Второсо кацала блока 5 сигнализации, тоже низкий уровень. С выхода ицвертора 10 высокий уровень напряжения поступает ца 5-вход григгера 11, а с второго ьсхода коммутапгора 7 направлессия вращения ця Й-вход :сизкий уровень. Триггер 11 устанавливается в единичное состояние. На втором и третьем входах элемента ЗИ 12, связанных соответствеццо с...
Чувствительный элемент для системы автоматического регулирования скорости и частоты

Номер патента: 120252
Опубликовано: 01.01.1959
Авторы: Вевюрко, Липелис, Сергиенко
МПК: G01P 3/46, H02K 17/42
Метки: системы, скорости, частоты, чувствительный, элемент
...э.д.с. Чувствительный элемент (см. схему) вы машины, включаемой по схеме тахогенерато имеет две обмотки 1 и 2 и ротор 3, изготовл материала,При подаче на обмотку 1 переменного и стоты на выходе обмотки 2 появляется переме амплитуда и фаза которой зависят от скорост При переходе через синхронную скорост ной э.д.с, претерпевают скачок, что обеспечи ния на синхронной скорости.ия скорости и частоты при ые в виде двухфазного та отличается от известных з магнитотвердого матестатизм зменени егулирования н амплитуды и фа полнен в виде двухфазно ра переменного тока. Она енный из магнитотвердого апряхкения постояннои чанная э.д,с. той же частоты, и вращения ротора.ь величина и фаза выходвает астатизм регулироваПре из ния Чувствительный...
Устройство для измерения и фиксации скорости изменения частоты в энергостстеме

Номер патента: 565258
Опубликовано: 15.07.1977
Авторы: Горошников, Савельев
МПК: G01R 23/00
Метки: изменения, скорости, фиксации, частоты, энергостстеме
...импульса сброса.Блок управления 11 совместно с блокоЫ подготовки 12 предназначен для организации двухтактного режима работы устройства и осуществляет следующие операции: сбрасывает блок 10 управления реверсивного счетчика 1 через элементы ИЛИ 18 и 20 в исходное положение при появлении сигнала на любом выходе дешифратора 2 при 0,25 Гц/с; обеспечивает работу блока, подготовки и подачу сигналов во втором также с дешифратора 2 на блок 8; через элемент И 16 останавливает устройство, осуществляя тем самым операцию память,величины скорости, в момент прихода с дешифратора второго импульса или в заранее заданный момент времени.Известные цифровые устройства, ораанивающие временные интервалы для определения скорости изменения частоты, реализуют...
Предыдущий патент: Ледоразрушающее устройство для буровой платформы
Следующий патент: Траншейный экскаватор
Случайный патент: Устройство для уплотнения муфельных конвейерных печей с нейтральной или восстановительной атмосферой