Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
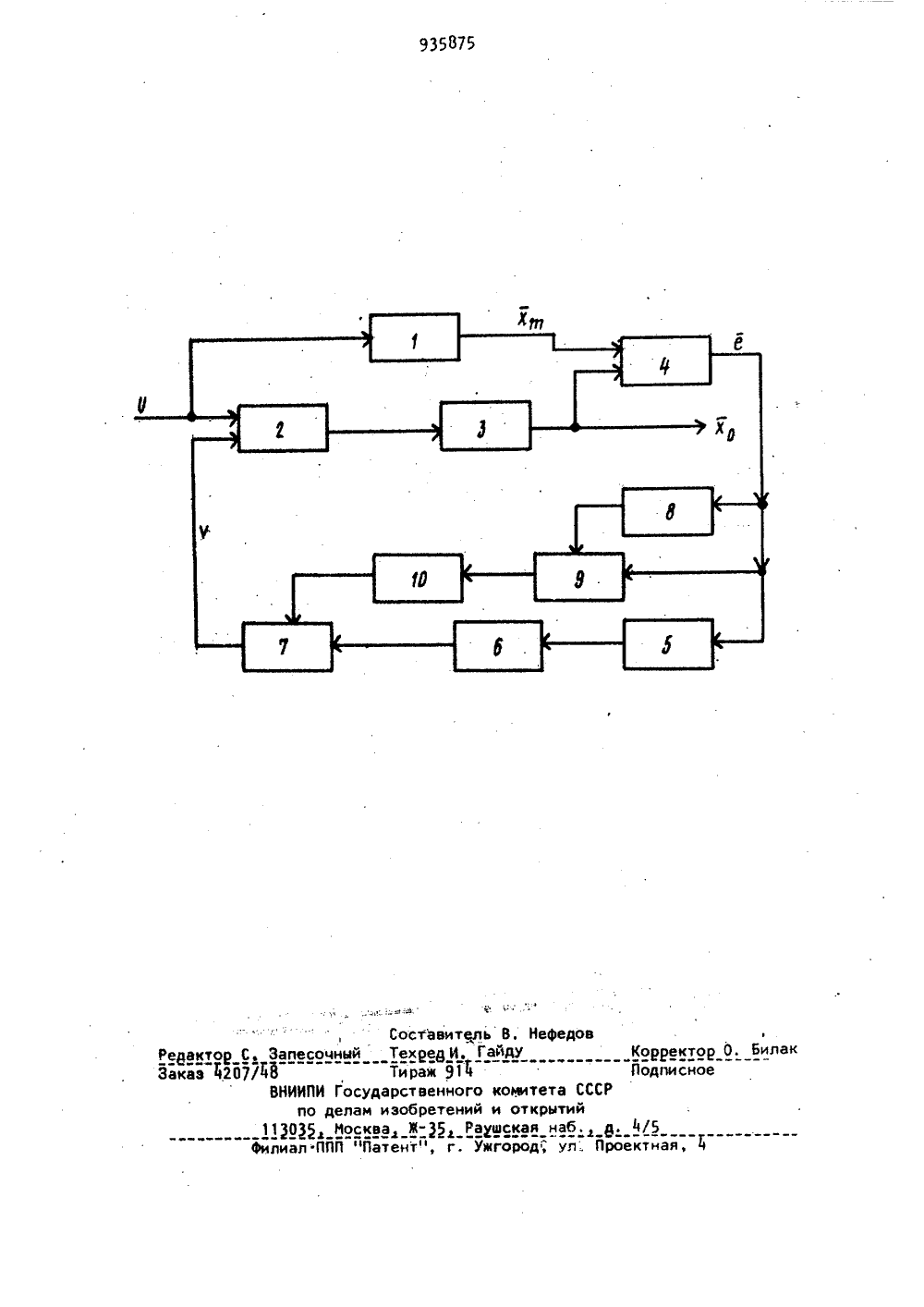
(61) Дополнительное к авт. сеид-в Заилено .08.10. 80 (21) 2989392/18-2 1)М В 13/О ением заявки прис Увеуааретюные СССР ао делам нзебретенн н открытийквинтет 3) Приорит Опубликовано 15,06.82. Бюллетень М 2 Дата опубликования описания 17. 06. 82)У,К 62-50 (088.8) Авторызобретения Ю.А. Борцов, И.Б. Юнгер и Ю.А. Пахомов". нградский ордена Ленина электротехнический им. В.И. Ульянова (Ленина)(7 ель 54) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ной сра т с 1Изобретение относится к автоматическому управлению объектами с параметрическими возмущениями и ненаблюдаемыми аддитивными внешними возмущениями и может быть использовано, в частности; в роботостроении в системах управления рабочими органами манипуляционных роботов .и в металлообра батывающей промышленности в системах управления приводами главного движения металлорежущих станков и приводами прокатных. станов,Известна самонастраивающаяся система управления, содержащая устройство идентификации и последовательно со единенные регулятор и объект управления, подключенный выходом к входу ре" гулятора и входу устройства идентификации, выход которого соединен с входом настройки регулятора 1.Недостатком известной системы является невозможность использования ее при налиции ненаблюдаемых внешних воз мущениях, ак как устройство идентификации системы предназначено для идентификации только объектов с наблюдаемыми внешними возмущениями.Из вест на самонастраи вающаяся система упра влени я с си гнал ьной самонастройкой, содержащая эталонную модель и последовательно соединенные первый сравнивающий элемент, нелинейный элемент, объект управления, вто рой сравнивающий элемент и регулятор, подключенный выходом к первому входу первого сравнивающего элемента, второй вход которого соединен с выходом объекта управления, а третий вход - с вхором эталонной модели, подключенвыходом.ко второму входу второговнивающего элемента 121.Недостатками данной известной сисемы являются неудовлетворительная тепень инвариантности системы при широком диапазоне изменения параметров объекта управления и сложность задачи обеспецения устойцивости системы при больших скоростях изменения5 фрого релейного элемента 8 появляетсясигнал, определяющий знак сигналаошибки, а на Ьыходе второго умножителя 9 - сигнал, пропорциональныймодулю ошибки, который после усиления усилителем 10 поступает на второйвход первого умножителя 7,Для придания этому сигналу нужного знака служит цепь иэ последователь но соединенных вычислителя 5, элемента 6 и умножителя 7 В этой цепи с помощью вычислителя отклонения фазовыхкоординат 5 вычисляется отклонениеточки, изображающей вектор ошибки регулирбВания в фазовом пространстве,от плоскости скольжения. Сигнал, проорциональный этому отклонению, с выода вычислителя отклонения фазовых,координат 5 поступает на вход первого релейного элемента 6, на выходекоторого образуются сигнал знака отклонения вектора ошибки регулирования от гиперплоскости скольжения, Врезультате перемножения в первомумножителе 7 выходных сигналов усили.теля 10 и первого релейного элемента 6 на первом входе сумматора 2формируется дополнительное разрывноеуправление Ч, которое за счет выборасоответствующего коэффициента усилителя 10 обеспечивает выполнение всистеме неравенства.1, 1,см. чертеж) зю РЬормЬ) -о)(г АщеРА .АюФ ИдЬц-Ь Ь)ь-ЙВ)Г(г Ь ЧЬ О),вектор состояния объекта управления;непрерывное управление навходе системы;вектор ошибки между векторомсостояния объекта управления и вектором состояния егомодели;вектор внешних возмущений;,стационарная матрица моделиобъекта управления;нестационарная матрица объекта управления;мерный вектор-столбец пере"дачи управлений и объектом управления;нестационарная матрица передачи возмущений объектом управления; где ХоВОЮ" 3 93587входных сигналов, что характерно дляобъектов управления укаэанных вышеобластей применения.Наиболее близким к предлагаемойтехническим решением является система управления с переменной структурой,содержащая модель объекта управления,последовательно соединенные сумматор,объект управления, сравнивающий элемент, вычислитель отклонения фазовых 10координат, первый релейный элемент,первый умножитель и последовательносоединенные второй релейный элементи второй умножитель, причем вход второго релейного элемента соединен с вы 1 Юходом сравнивающего элемента, второйвход которого подключен к выходу мо)дели объекта управления3.Недостатком известной системы является относительная сложность егоструктуры и как следствие, неудовлетворительная надежность,С целью повышения надежности самонастраивающейся системы управления,она содержит усилитель, вход которого дсоединен с выходом второго умножителя,а выход " со вторым входом первогоумножителя, подключенного выходом кпервому входу сумматора, второй входкоторого соединен с входом моделиобъекта управления, второй вход второго умножителя соединен с выходомсравнивающего элемента.На чертеже изображена блок-схемасистемы.Система содержит модель объектауправления 1, сумматор 2, объект управления 3, сравнивающий элемент 4,вычислитель отклонения фазовых коор"динат 5, первый релейный элемент 6,первый умножитель 7, второй релейныйэлемент 8, второй умножитель 9 иусилитель 10.Система работает следующим образом.Входной сигнал воздействует навход модели 1 и через сумматор 2 навход объекта управления 3, Яри отсутствии параметрических возмущенийв объекте управления 3 и внешнихвозмущений, действующих на него, навыходе сравнивающего элемента 4 сигнал равен нулю, В противном случаевыходной сигнал сравнивающего элемента 4, равный ошибке регулирования, поступает на вход вычислителя отклонения фазовых координат 5, второго релейного элемента 8 и второгоумножителя 9. Яри этом на выходе вто 9358751Билак ректор Описное по делам1 ДОЯ Моск лиал ППП П 5 тная,Редактор С. ЗапесочныЗаказ Ы 7(ИВНИИПИ Го Сост 4 витль В, НефедовТехое 8 И, ГайдуТираж 914арственного комитета СССРизобретений и открытийа Ж-)5 Раушская наб. 8тент", г. Ужгород, ул:, Про
СмотретьЗаявка
2989392, 08.10.1980
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ЮНГЕР ИГОРЬ БОРИСОВИЧ, ПАХОМОВ ЮРИЙ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 15.06.1982
Код ссылки
<a href="https://patents.su/4-935875-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство для формирования сигнала отклонения толщины прокатываемой полосы от заданного значения

Номер патента: 1435345
Опубликовано: 07.11.1988
Авторы: Брувер, Дралюк, Козоровицкий, Конторович, Кувшинов, Мишин, Русаков
МПК: B21B 38/04
Метки: заданного, значения, отклонения, полосы, прокатываемой, сигнала, толщины, формирования
...вход - с выходом реохорда 11 заданиятолщины, входы которого соединены параллельно с входами реохорда 10 и источником 12 питания реохордов, Реохорд 10 механически соединен с кли ном 4, датчиком 18 начального положения клина и серводвигателем 8 клина, вход которого соединен с выходом следящей системы 7 клина, соединенной входом с выходом блока 6 выделения сигнала рассогласования.Устройство работает следующим образом.При наличии полосы в зоне измерения клин 4 находится в положении, соответствующем среднему значению толщины полосы. При этом датчик 18 начального положения клина выдает сигнал, соответствующий нормальному измерению, переключатель 20 находится в положении "2", соответствующем подключению на вход суммирующего усилителя 17...
Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости

Номер патента: 1432457
Опубликовано: 23.10.1988
МПК: G05B 13/00
Метки: жесткости, идентификации, колебаний, объекту, переменной, присоединенного, упругого, элемента
...объекта наблюдения, полученное в блоке6, влечет за собой необходимость определения начальных условий (18) дляинтегрирования уравнения (15),Определение начальных условий (181происходит в блоке 9 расчета параметров идентиФикатора,При помощи источника 51 пастояннога напряжения, задающего Л,г, умножителей 53-56, сумматоров 63-65, делителей 71 и 69 и сигналов а, Ь(Г),с(Г), 6, поступающих соответственно на первые-четвертые входы блока 9,на четвертом выходе блока Формируетсясигнал =(Л Ь)/(Л - ЛЙ- ), а натретьем выходе блока 1 р(а+с 1 г,)/Лг .При памапд источника,52 постоянного напряжения, умножителей 57,.58, 60 и59, сумматоров 62, 61, бб, 6 7 и 68,делителя 70 .на втором выходе блокаформир ется 114 ( Л а Л 1 гд га) /( с-Лг +Лй), а на первом...
Система стабилизации объекта с присоединенным упругим элементом

Номер патента: 1525676
Опубликовано: 30.11.1989
Авторы: Мануйлов, Черныш, Шалымов
МПК: G05B 13/00
Метки: объекта, присоединенным, стабилизации, упругим, элементом
...протекать всепроцессы в системе.Предлагаемая система стабил)лзации(в Отл)лцие от прототипа) обеспечиваетпрактически полную компенсаИю возмущающе 1-о влияния динамики присоедине)4-,:ного упругого элемента на угловоедвижение объекта управления. При этсмстратегия компенсирующего управлениявыЬрана так, чтоЬы обесг)ечить фактически и активное демпфирование ксле,-".,)аний упру-ого элемента за ;цет раци- "онального использованля возможностейцеленаправленного изменения велич)лныкомпенс рующего управления в зависимости От текущего состояния упругогс)элемента, что также способствует р,остижению высокой точности стабилизацииуглового положения объекта. В результате действия формируемого комбиниОсза 1.10 Г 0 УП Рс: В;1 ЕНИ.- И Сс)М ООЪЕК Г...
Устройство для диагностирования взаимосвязанных элементов объекта

Номер патента: 1500998
Опубликовано: 15.08.1989
МПК: G05B 23/02
Метки: взаимосвязанных, диагностирования, объекта, элементов
...подается лишь на секцик 3.1. Индикатор 9.2 индицирует отказ,Если в датчиках нет отказов, обусловленных ошибками 1-го рода, то при отключенных от объекта входных сигиа лах (Воэдеиствиях) на выходах датчиков, а значит, и на информационных входах 19-25 дешифратора образуется кодовая комбинация сигналов в виде 0000000 (все сигналы - логические ну, ли). При этом все диоды 50-56 матрицы становятся открытыми .от шины 47 питания через резисторы 57-63 и диоды 50- 55 к входам 19-25 дешифратора текут соответствующие токи, В результате паде-,1500998 40 ния напряжения на резисторах 57-63 навсех выходах 26-32 секции 3. 1 дешифратора образуются низкие (нулевые) потенциалы и индикаторы 4,1-4.7 отказов датчиков будут выключены. Поскольку питание на...
Устройство для формирования сигнала отклонения луча электронно-лучевой трубки

Номер патента: 1425871
Опубликовано: 23.09.1988
МПК: H04N 3/16
Метки: луча, отклонения, сигнала, трубки, формирования, электронно-лучевой
...и подавляются паразитные колебания в отклоняющем токе(фиг,2 в), Форма отклоняющего тока припостоянно, включенной деггпфирующейцепи показана на фиг.2 г,Рассмотрим работу тракта формирования кадрового отклоняющего тока,С выхода второго генератора рО пилообразного напряжения через второйсумматор РР пилообразное напряжениекадровой частоты поступает на первый вход второго ПНТ Р 2, на второйвход которого подается сигнал обратной связи по току с входа второго датчика Р 4 тока отклонения, На второй вход второго сумматора рр поступает корректирующий сигнал с второго выхода блока 9 коррекции.20 Паразитные колебания в кадровом отклоняющем токе возникают вследс 1- вие индуктивно"емкостной связи мея;цу строчными.и кадровыми отклоняющими катушкал:и,...
Предыдущий патент: Обратимая следящая система
Следующий патент: Система связи электронно-вычислительной машины с пневматическими регуляторами
Случайный патент: Устройство для регулирования давления газа