Цифровая система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
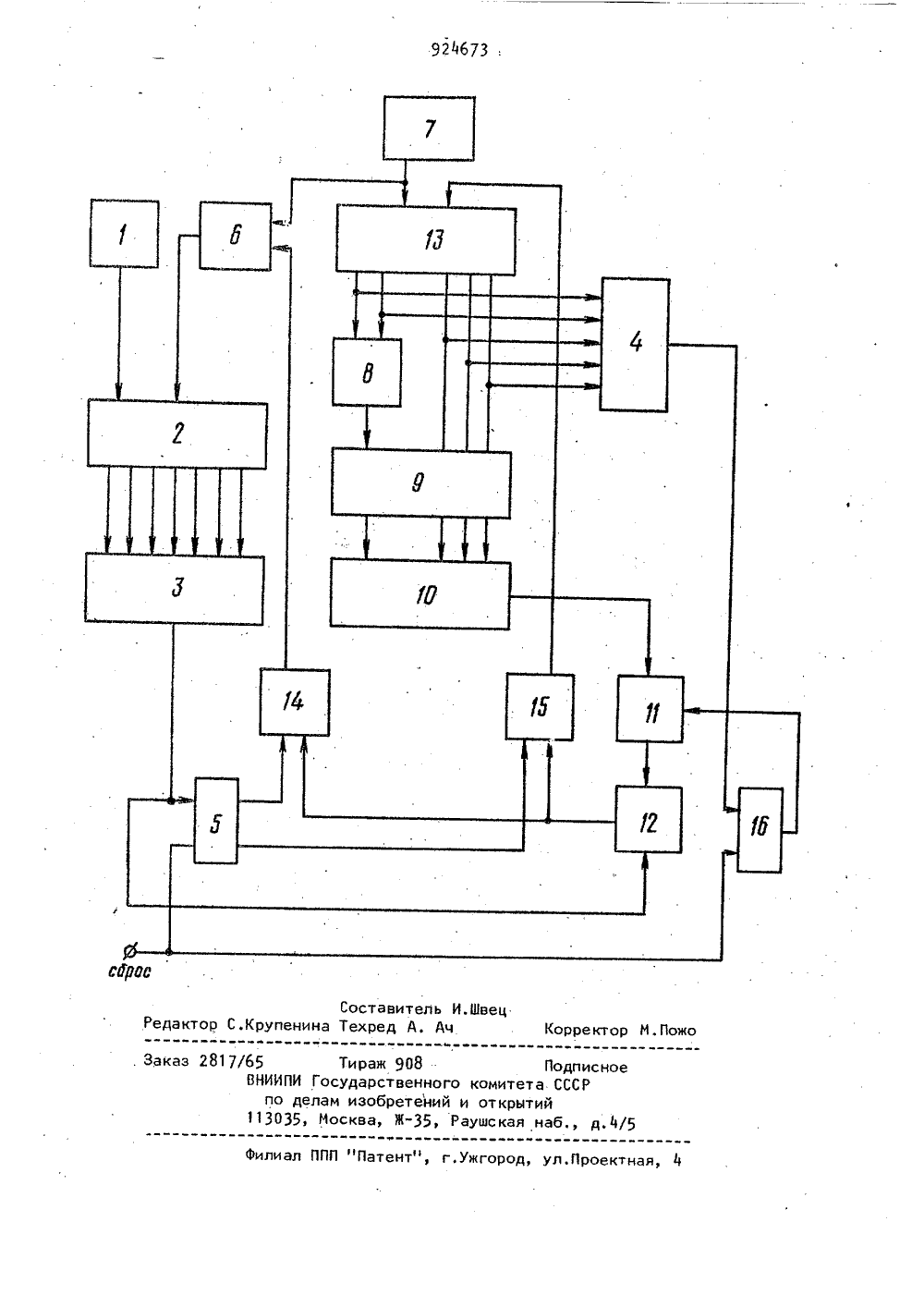
Сов э СоветскихСоциалистическихРеспублик ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ и 924673(5)М. Кл. 6 05 В 19/18 с присоелннениеет заявки %в Гееударетюкый канитет СССР пе делан веееретенкй и еткрытвй(23) ПриоритетОпубликовано 30,04.82Бктллетень Ю 1 б Дата опубликования описания 30,04.82(71) Заявитель СИСТЕМА ПРОГРАИИНОГПРАВЛЕНИЯстаршего разря-, д - напряжение, дом и датчик обИзобретение относится к вычисли" тельной технике, в частности к системам программного управления технологическим оборудованием, и может быть использовано для управления металло- режущими и сверлильными станками.Известна цифровая система программного управления, содержащая входное устройство, блок текущего положения управляемого объекта, релейный блокто управления перемещением объекта, соединенный через редуктор и датчик обратной связи с блоком текущего положения объекта 111.Недостатком указанной системы явт ляется ее низкая точность, так как релейный блок управления обеспечивает быстрое торможение лишь малоинерционных объектов с малыми скоростями.Наиболее близкой к предлагаемой является цифровая система программного управления, содержащая последовательно соединенные блок задания программы, сумматор, элемент ИЛИ, логический блок выделенияда, преобразователь коблок управления приворатной связи Е 22.Известная система обеспечивает. уменьшение до нулевого значения ско" рости перемещения объекта при его движении. Недостаток известной системы состоит в том, что уменьшение скорости происходит на протяжении всей длины перемещения, а это снижает быстродействие, особенно при больших величинах перемещений. Кроме того, в этой системе на протяжении всей длины перемещений скорость движения объекта изменяется,. что ограничивает область ее использования, так как система не может применяться для управления объектами, скорость движения которых должна быть постоянной.Цель изобретения - расширение области применения системы.Указанная цель достигается тем, что в циФровую систему программного3 92467управления введены второй сумматор,первый электронный коммутатор, задатчик величины участка замедления ипоследовательно соединенные первыйблок выделения нулевого состояния,первый триггер, второй электронныйкоммутатор, третий сумматор, второйблок выделения нулевого состоянияи второй триггер, выходом подклюценный к второму входу блока управления 10приводом, вторые входы первого ивторого триггеров соединены с шиной"Сброс", а второй выход первоготриггера соединен с первым входомпервого электронного коммутатора, 5второй вход которого соединен с выходом датчика обратной связи, к выходу которого подключен второй входвторого электронного коммутатора, авторой вход датчика обратной связи р 0соединен с выходом первого блокавыделения нулевого состояния, выходпервого электронного коммутаторасоединен с первым входом второго сумматора, выход которого подключен квторому входу первого сумматора, выходами подключенного к входам первого блока выделения нулевого состояния, а второй вход второго сумматорасоединен с выходом задатцика величины участка замедления и с втс 9 ымвходом третьего сумматора, выходымладших разрядов которого соединеныс вторыми входами логического блока,а выходы старших разрядов подключены35к входам элемента ИЛИ,На чертеже представлена схема циф-ровой системы.Система содержит блок 1 задания40программы, первый сумматор 2, первыйблок 3 выделения нулевого состояния,второй блок 4 выделения нулевого состояния, первый триггер 5, второй сумматор 6, задатчик 7 величины участка- 45замедления, элемент ИЛИ 8, логическийблок 9, преобразователь 10 код - напряжение, блок 11 управления приводом, датчик 12 обратной связи, третийсумматор 13, первый электронный коммутатор 14, второй .электронный коммутатор 15, второй триггер 16.Устройство работает следующим образом.Вначале работы импульс, пришедший на шинуСброс", устанавливает триггер 5 в состояние, при котором электронный коммутатор 15 закрывается, а триггер 16 включает блок 11 управ 3 ф ления приводом. Блок 1 задания программы выдает в сумматор 2 код, соответствующий величине заданного перемещения. Задатчик 7 величину участка замедления выдает в сумматор 13 и в сумматор 6 код, соответствующий величине участка, на котором должнаубывать скорость перемещения, На другой вход сумматора 2 через электронный коммутатор 14 поступает код текущего положения объекта с датчика 12 обратной связи, причем соответствующие разряды этого кода суммируются с соответствующими разрядами кода с задатцика 7 величины участка замедления при помощи сумматора 6.Сумматор 2 формирует код разности заданного перемещения и суммарного кода текущего положения объекта и заданного уцастка замедления. Таким образом, нулевое состояние сумматора 2 будет совпадать с моментом прохождения объектом начала участка замедления и на выходе блока 3 выделения нулевого состояния формируется импульс, который сбрасывает показания датчика 12 обратной связи в нуль и опрокидывает триггер 5 в противоположное состояние, при котором электронный коммутатор 14 закрывается, а электроннь 1 й коммутатор 15 открывается, пропуская сигналы с датчика 12 обратной связи на второй вход сумматора 13. Сумматор 13 формирует код разности величины участка замедления и показаний датцика 12 обратной связи и младшие разряды кода разности поступают непосредственно в логический блок 9, а старшие поступают в него через элемент ИЛИ 8. При этом преобразователь 1 О код-напряжение поочередно выдает заданные напряжения, соответствующие весам отдельных разрядов, образующие гистограмму закона торможения. В тот момент, когда код с датчика 12 обратной связи будет соответствовать коду с задатчика 7 величины участка замедления, показания сумматора 13 будут равны нулю и на выходе блока 4 выделения нулевогосостояния образуется импульс, которыйпоступает на вход установки нуля триггера 16. Триггер 16 опрокидывается и отключает блок 11 управления приводом перемещение объекта заканчивается в заданной тоцке. Отключение блока управления приводом необходимо для того, чтобы избавиться от ошибки при позиционировании в случае смеще5 92 4 о 7 ния нуля преобразователя код-напряжение.Цифровая система автоматического управления обладает более высоким быстродействием, чем известная, так как в ней снижение скорости движения объекта происходит не в начале перемещения, а на заданном участке, величина которого выбирается так, чтобы обеспечить нужную точность позици-о онирования. Формула изобретения Цифровая система программного управления, содержащая блок задания программы, выходом подключенный к первому сумматору, и последовательно соединенные элемент ИЛИ, логический, 20 блок, преобразователь код-напряжение, блок управления приводом и датчик обратной связи, о т л и ч а ю щ а я - с я тем, что, с целью расширения области применения, в нее введены 2 з второй сумматор, первый электронный коммутатор, задатчик величины участка замедления и последовательно соединенные первый блок выделения нулевого состояния, первый триггер, . щ второй электронный коммутатор, третий сумматор, второй блрк выделения нулевого состояния и второй триггер, выходом подключенный к второму вхо 3 6ду блока управления приводом, вторыевходы первого и второго триггеровсоединены с шиной "Сброс", а второйвыход первого триггера соединен спервым входом первого электронногокоммутатора,.второй вход которогосоединен с выходом датчика обратной связи, к выходу которого яодклюцен второй вход второго электронного коммутатора, а второй вход датчика обратной связи соединен с выхо,дом первого блока выделения нулевого состояния, выход первого электронного коммутатора соединен с первымвходом второго сумматора, выход которого подключен к второму входу первого сумматора, выходами подключенного к входам первого блока выделениянулевого состояния, а второй входвторого сумматора соединен с выходомзадатчика величины участка замедленияи с вторым входом третьего сумматора,выходы младших разрядов которого соединены с вторыми входами логическогоблока, а выходы старших разрядов подключены к входам элемента ИЛИ.1 Источники инФормации,принятые во внимание при экспертизе1. Авторское свидетельство СССРЬ 351200., кл. С 05 В 1918, 19 б 5.2. Авторское свидетельство СССРЬф 624210, кл. 6 05 В 19/18, 1978924673 ож 7/б 5 Тираж 908 ВНИИПИ Государственного по делам изобретений 113035, Москва, Ж, Раказ 2 илиал ППП "Патент", г.ужгород, ул.Проектная Редактор С.Крупенина Те авитель И.Швецед А. Ач Коррект Подписнкомитета СССРи открытийаущс кая наб., д.
СмотретьЗаявка
2976965, 25.08.1980
ПРЕДПРИЯТИЕ ПЯ В-8205
ШМЫРОВ ВАЛЕРИЙ АЛЕКСАНДРОВИЧ, НОВИЧИХИН ВАСИЛИЙ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного, цифровая
Опубликовано: 30.04.1982
Код ссылки
<a href="https://patents.su/4-924673-cifrovaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Цифровая система программного управления</a>
Устройство для формирования сигнала управления с оптимальными коэффициентами обратной связи

Номер патента: 1242913
Опубликовано: 07.07.1986
Автор: Пешков
МПК: G05B 17/00
Метки: коэффициентами, обратной, оптимальными, связи, сигнала, формирования
...т.е. чтобы312429нирующему полюсу разомкнутого объек"та из условияГлГ" лфЕсли система в момент времени С находится в состоянии х(й), то через отрезок времени Т, т.е. в момент времени й+Т, система (1) переходит в состояние, при условии ц(Т ) =сопвй,10 ЬГй,. й+Т): 13 4в котором с помощью параметра Т, а также с помощью матриц У и К, осуществляется оперативное изменение качества управления при изменении режимов работы объекта.Формирование матрицы У (й) реализуется с помощью блока интеграторов 1 и блоков 2 и 8, которые осуществляют решение матричного дифференциального уравнениях(С+Т) -с(Т) х(Е)+Н(Т) ОО,),ЮГЕ, с+Т),(4) где ф (Т)-ехр(А ), Н(Т)дехр(А)ВЙ=Г 1 ехр(АЦЙ,) В. (5) Юоо В случае, когда рассматриваемая мера отклонения Я(+Т)минимальна,...
Способ настройки пускорегулирующего устройства газоразрядной лампы с тиристорным регулятором и блоком фотоэлектрической обратной связи

Номер патента: 1032595
Опубликовано: 30.07.1983
Автор: Варшавский
МПК: H05B 41/23
Метки: блоком, газоразрядной, лампы, настройки, обратной, пускорегулирующего, регулятором, связи, тиристорным, устройства, фотоэлектрической
...лампой 1 к источнику питания переменного тока.Измерительный яост блока 6 фотоэлектрической обратной связи в двух противоположных плечах содержит фото- резисторы 13 и 11,а в двух других -пе ременные резисторы 15 и 1 б,ползунки которых кинематически связаны с ползунками переменных резисторов 8 и 9 датчика 5. Резистор 17 измерительной диагонали моста блока 6 фото-. электрической обратной связи после.з 1032 довательно с переменными резистора= ми 8 и 9 включен в цепь управления тиристорным регулятором 4. Параллельно резистору 17 подключены замыкающие контакты 18 реле 7 времени.Цепь питания генератора 2 поджига ющих импульсов подключена параллельно цепи, состоящей из последовательного соединения газоразрядной лампы 1 и вторичной обмотки...
Устройство для группового поиска кратных дефектов в комбинационных логических блоках

Номер патента: 896628
Опубликовано: 07.01.1982
МПК: G06F 11/26
Метки: блоках, группового, дефектов, комбинационных, кратных, логических, поиска
...индикатора исправности. Если на каком-то К-ом выходе любого из И контролируемых 1 блоков на 1"ом такте 15 появляется сигнал, не совпадающийс сигналом на К-ых выходах остальньос контролируемых блоков 1, то срабатывает К-ая из М схем 12 сравнения. Выходной сигнал К-ой схемы 12 сравнения 20 через элемент ИЛИ 15 опрокидывает триггер 8 пуска в 01, который закрывает элемент И 4, тем самым прекращая поступление тактовых импульсов с генератора 9 в узлы устройства. При 25 этом блок 5 индикации фиксирует номер такта, на котором зарегистрировано несравнение выходных сигналов И контролируемых блоков 1, что соответствует позиции неисправного элемента в одном из И контролируемых блоков 1Если данная ситуация соответствует обнаружению первого дефекта в...
Система управления для объектов с запаздыванием

Номер патента: 860002
Опубликовано: 30.08.1981
Авторы: Брусов, Левичев, Сухарев
МПК: G05B 17/00
Метки: запаздыванием, объектов
...на усилитель 20, с выхода которого сигнал поступает на второй вход пятого сумматора 19. С выхода сумматора 19 сигнал подается на параметри веские входы второго усилителя 12 и первого усилителя 7.Обозначим передаточную функцию обьекта 2 с запаздыванием через Че(Р)е 1, передаточную функцию модели 60 объекта 6 беэ запаздывания - через И р), передаточную Функцию второго блока 10 временной задержки - е Рд, 5-е Р,15-е) передаточную функ - Р С+Ь)цию обратной модели 11 объекта без 65 запаздывания - Я 1 Р). Пусть Чав)=огде К - коэффициент усиления объекта;полином и-го порядка от р,пусть также Ч,1 Р)= -ф, тогда Ч пк)6 со) м 1 о,р= -сс, где Кс- перестраиваемый коэфФицйент усиления усилителей 7 и 12Запишем выражение для иэображениявыходного...
Устройство для обмена информацией

Номер патента: 941978
Опубликовано: 07.07.1982
Авторы: Дшхунян, Коваленко, Машевич, Теленков, Чичерин
МПК: G06F 3/04
Метки: информацией, обмена
...загрузка регистра 21, регистров 13 и 14 кодом, соответствующим режиму первой группы повторяющихся ми крокоманд размаскированному сиг-.Ф17 налу с выхода переноса счетчика и положительной полярности условия.После этого подается микрокомандакоммутацйи информации из входа-выхода 33 на вход-выход 31, по которой информация из блока 3 поступаетв блок 1, Параллельно с этим происходит выполнение операции +1 всчетчике 17, который Формирует сигнал переноса, поступающий в блок 11.5 Так как в регистре 13 содержитсякод, соответствующий размаскированию сигнала переноса счетчика 17,то на управляющем входе-выходе 24это состояние соответствует перепол О нению (не переполнению) счетчика. Вслучае не переполнения счетчика нулевой сигнал от старшего...
Предыдущий патент: Имитатор технологического объекта
Следующий патент: Устройство для числового программного управления станком
Случайный патент: Способ сборки и разборки фланцевых соединений и устройство для его осуществления