Система регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 924668
Авторы: Дмитриев, Лихошерстов, Рабинович

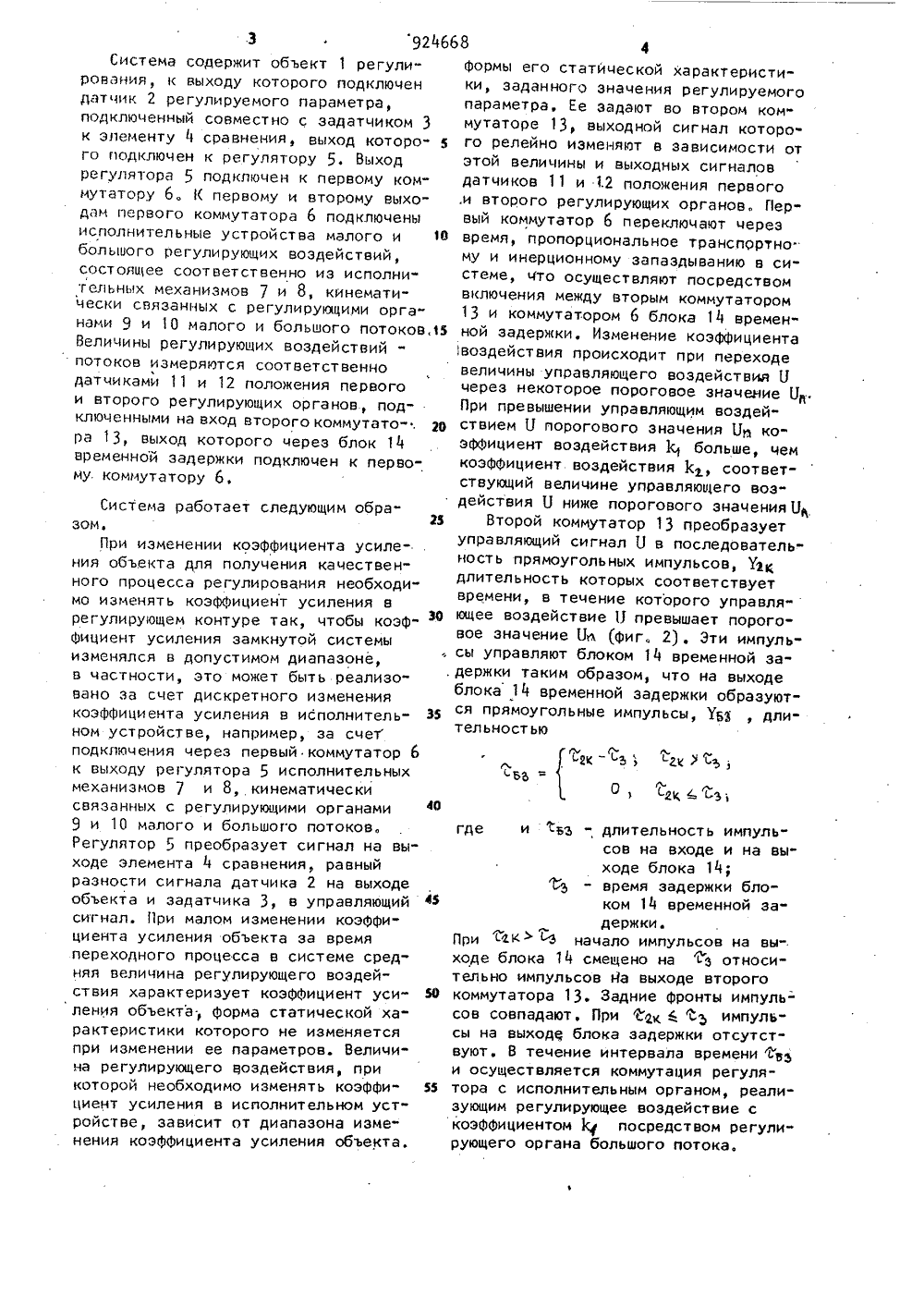
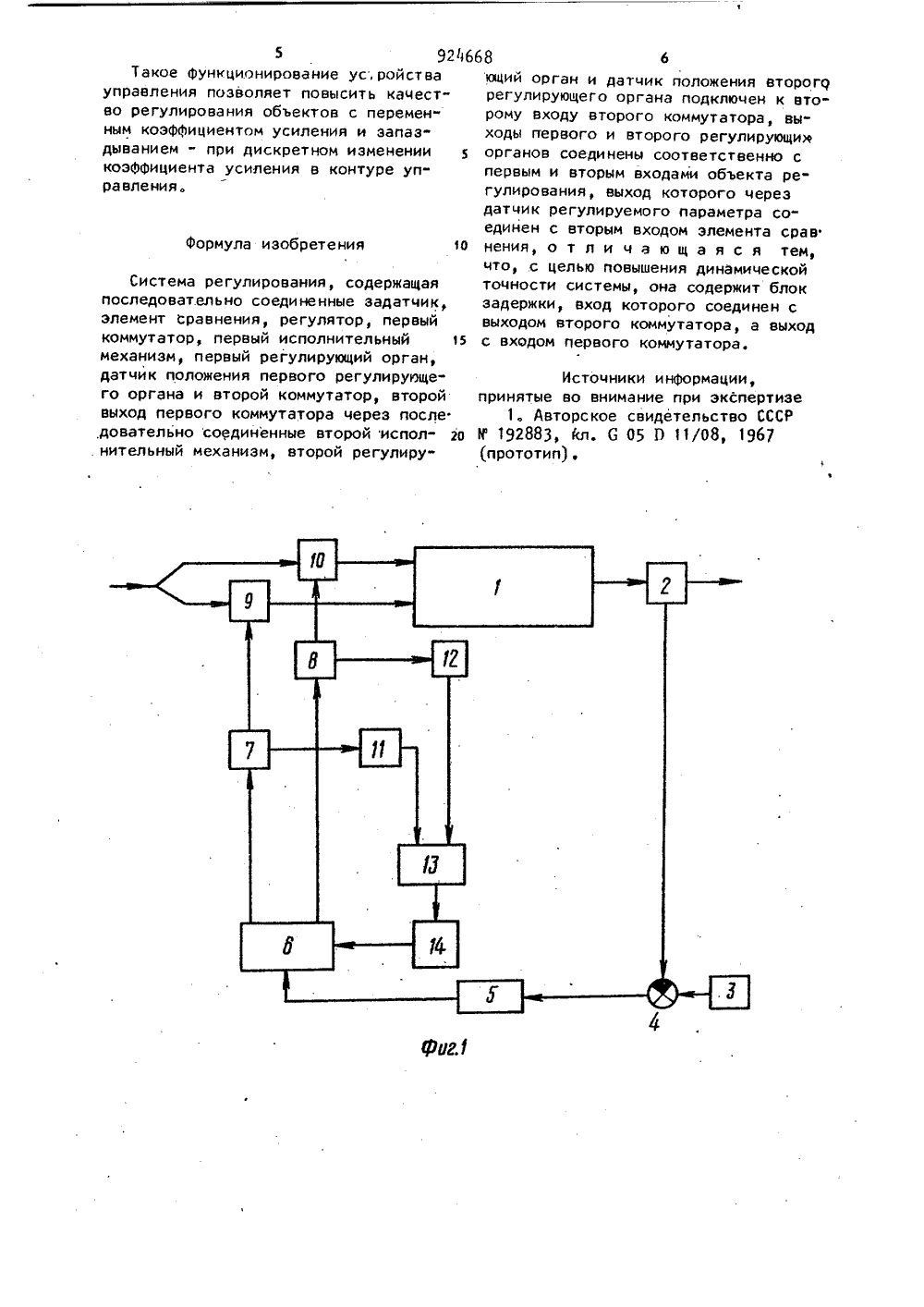
Текст
Соиээ СоветсиикСоциалистичесиикРеспублик ВТОРСКОМУ СВИДЕТЕЛЬС ополнительное к авт. саид-ву(22) Заявлено 05,04. 77121) 2472290/1л 1)Ы. Кл. 6 05 02 с присоединением заявки МГФ 6 дзрстйенюый кОЮСССР 3)приоритет Опубликовано 30.04 Дата опубликования а дел ретенки Бюллетень РЙ 1 К 62 8.8) ткрытк сания 30.04.(54) СИСТЕМА РЕГУЛИРОВАНИ Изобретение относится к системрегулирования выходного параметраобъекта путем изменения расхода тдых, жидких или газообразных матеальных потоков, в особенности приравлении объектами с переменным коэффициентом усиления и транспортнызапаздыванием, в частности для релирования щелочности пульпы в циклизмельчения при обогащении руд цвеных металлов. е упм У е л10 улирования,ьно соединенравнения, ре"т 5тор, первыйпервый рек положенияргана и втовыход перво".следовательнолнительныйирующий орган ого регулируИзвестна система ресодержащая последоватеные задатчик, элементгулятор, первый коммутисполнительный механизгулирующий орган, датчипервого регулирующего орой коммутатор, второйго коммутатора через посоединенные второй испомеханизма, второй регули датчик положения втор ющего органа подключен к второму входу второго коммутатора, выходы перво" го и второго регулирующих органов соединены соответственно с первым и вторым входами объекта регулирования, выход которого через датчик регулируемого параметра соединен с вторым входом элемента сравнения Ц 1.Недостаток известного устройства состоит в относительно низкой динамической точности системы.Цель изобретения - повышение динамической точности регулирования объектов с переменным коэффициентом усиления и транспортным запаздыванием.Поставленная цель достигается тем, что в системе регулирования дополнительно установлен блок задержки, вход которого соединен с выходом второго коммутатора, а выход - с входом первого коммутатора.На фиг. 1 приведена блок-схема системы; на фиг, 2 - временные диаграммы -924Система содержит объект 1 регулирования, к выходу которого подключендатчик 2 регулируемого параметра,подключенный совместно с задатчиком 3к элементу 4 сравнения, выход которого подключен к регулятору 5. Выходрегулятора 5 подключен к первому коммутатору 6. К первому и второму выходам первого коммутатора 6 подключеныисполнительные устройства малого ибольшого регулирующих воздействий,состоящее соответственно иэ исполнительных механизмов 7 и 8, кинематически связанных с регулирующими органами 9 и 10 малого и большого потоков,Величины регулирующих воздействий "потоков измеряются соответственнодатчиками 11 и 12 положения первогои второго регулирующих органов, подключенными на вход второго коммутато-,ра 13, выход которого через блок 14временной задержки подключен к первому. коммутатору 6,Система работает следующим обра" зом.При изменении коэффициента усиления объекта для получения качественного процесса регулирования необходи" мо изменять коэффициент усиления в регулирующем контуре так, чтобы коэффициент усиления замкнутой системы изменялся в допустимом диапазоне, в частности, это может быть реализовано за счет дискретного изменения коэффициента усиления в исполнитель" ном устройстве, например, за счет подключения через первый коммутатор 6 к выходу регулятора 5 исполнительных механизмов 7 и 8, кинематически связанных с регулирующими органами 9 и 10 малого и большого потоков. Регулятор 5 преобразует сигнал на выходе элемента 4 сравнения, равный разности сигнала датчика 2 на выходе объекта и задатчика 3, в управляющий сигнал. При малом изменении коэффициента усиления объекта за время переходного процесса в системе средняя величина регулирующего воздействия характеризует коэффициент уси" ления объекта; форма статической ха" рактеристики которого не изменяется при изменении ее параметров. Величина регулирующего цоздействия, при которой необходимо изменять коэффициент усиления в исполнительном устройстве, зависит от диапазона изменения коэффициента усиления объекта.668 4 гъ Р.2 к - "ь"ьь = аь;ляк-ь; 26 23 зо Формы его статической характеристики, заданного значения регулируемогопараметра, Ее задают во втором коммутаторе 13, выходной сигнал которого релейно изменяют в зависимости отэтой величины и выходных сигналовдатчиков 11 и 1.2 положения первого.и второго регулирующих органов. Первый коммутатор 6 переключают черезвремя, пропорциональное транспортному и инерционному запаздыванию в системе, что осуществляют посредствомвключения между вторым коммутатором13 и коммутатором 6 блока 14 временной задержки, Изменение коэффициентавоздействия происходит при переходе величины управляющего воздействия У через некоторое пороговое значение Ц, При превышении управляющим воздей" ствием У порогового значения Б коэффициент воздействия 1 больше, чем коэффициент воздействия Е, соответствующий величине управляющего воз" действия У ниже порогового значения ЦВторой коммутатор 13 преобразует управляющий сигнал Ц в последователь" ность прямоугольных импульсов, У 1 к длительность которых соответствует времени, в течение которого управля" ющее воздействие Ц превышает пороговое значение Ь (фиг. 2) . Эти импульсы управляют блоком 14 временной задержки таким образом, что на выходе блока 14 временной задержки образуются прямоугольные импульсы, УЫ , дли- тельностью где и ьз - длительность импульсов на входе и на выходе блока 14;- время задержки блоком 14 временной за" держки.При кИ начало импульсов на выходе блока 14 смещено на э относительно импульсов Йа выходе второго коммутатора 13, Задние фронты импуль- сов совпадают. При к 4импульсы на выходе блока задержки отсутствуют. В течение интервала времени щэ и осуществляется коммутация регулятора с исполнительным органом, реализующим регулирующее воздействие с коэффициентом )с посредством регулирующего органа большого потока.формула изобретения 5 9216Такое функционирование ус, ройства управления позволяет повысить качество регулирования объектов с перемен" ным коэффициентом усиления и запаздыванием - при дискретном изменении коэффициента усиления в контуре уп" равления. Система регулирования, содержащая последовательно соединенные задатчик, элемент сравнения, регулятор, первый коммутатор, первый исполнительный 15 механизм, первый регулирующий орган, датчик положения первого регулирующего органа и второй коммутатор, второй выход первого коммутатора через после. ,довательно соединенные второй испол- го . нительный механизм, второй регулиру 68 6оций орган и датчик положения второго регулирующего органа подключен к второму входу второго коммутатора, выходы первого и второго регулирующим органов соединены соответственно с первым и вторым входами объекта регулирования, выход которого через датчик регулируемого параметра соединен с вторым входом элемента срав нения, о т л и ч а ю щ а я с я тем, что, с целью повышения динамической точности системы, она содержит блок задержки, вход которого соединен с выходом второго коммутатора, а выход с входом первого коммутатора. Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРИ 192883, йл. С 05 П 11/08, 196 У924668 Составитель А. Лаюедактор С. Крупенина Техред А.Рч Коррект ож ПодписноеССР а 4/5 ПП "Патент", г, Ужгород, ул. Проект ная,ли 2817/65 Тираж 90 ВНИИПИ Государственно по делам иэобретени 113035, Москва, Ж, комитетаи открытийаушская наб
СмотретьЗаявка
2472290, 05.04.1977
Заявитель 1ихаерстовп г;: Й.; -гл„ ТгУМ-и;: ; -: К; У-V -
РАБИНОВИЧ ИЛЬЯ ИОЙЛИКОВИЧ, ДМИТРИЕВ ВСЕВОЛОД БОРИСОВИЧ, ЛИХОШЕРСТОВ ВЛАДИМИР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки:
Опубликовано: 30.04.1982
Код ссылки
<a href="https://patents.su/4-924668-sistema-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Система регулирования</a>
Способ экстремального регулирования объектов с линейным динамическим звеном второго порядка и нелинейным статическим звеном

Номер патента: 549785
Опубликовано: 05.03.1977
МПК: G05B 13/02
Метки: второго, динамическим, звеном, линейным, нелинейным, объектов, порядка, статическим, экстремального
...0или оба одновременно меньше нуля).При схватывании объекта жесткой обратной связью с коэффициентом усиления движение его, как это следует из (1)-(2), Описывается уравнением- + ьт - + (Ь-/)(Х+Х)=0 ах а хд 1 д 1х -ках= = кс 3 При огоаниченном значении /3( всегда можно выбрать Й) + -т 4. Тогда независимо от комбинации знаков коэффициентов О) и б фазовые траектории уравнения (3) будут иметь вид спиралей или гипеобол с обшим смешением в сторону Х ,. Фазовое пространство объекта, упт)авлтО;Ого по Гредлагаемому способу, состоит и:.Тт.(" рех листов, частично наложенных друг на друга областямиНа листах 1,111(т фазовая точка з здесь движется по спиралям (или по эллипсам при О = (:) ), на листах 11,17, где (ЪО т - по кривым...
Способ экстремального управления объектами с линейным динамическим звеном второго порядка и нелинейным статическим звеном

Номер патента: 640256
Опубликовано: 30.12.1978
МПК: G05B 13/02
Метки: второго, динамическим, звеном, линейным, нелинейным, объектами, порядка, статическим, экстремального
...устойчивым (а 0, 60),так и неустойчивым (один из коэффициентов а, 6 или оба одновременно меньше нуля). Причем выход Х линейного звена ненаблюдаем.Процесс поиска минимума Я поясняетсядля нейтрального объекта (а=о=О), Поисковые шаги по Х образуются за счет 10изменения знака обратной связи с задержкой на постоянный интервал времени по отношеншо к моментам изменения знака первой производной Я от выходной величиныобъекта Я, а не по отношению к моментампзмснения знака Х, Для гходимости нроцесса поиска к экстремуму Я необходимознак обратной связи изменять с запаздыванием по отношению к моментам изменения знака Х. Для обеспечения этого условия выходной сигнал об ьекта умножают назнак произведения входного сигнала ф=-Хи второй производной Я от...
Противоблокировочное устройство для транспортных средств

Номер патента: 1189332
Опубликовано: 30.10.1985
Автор: Эрих
МПК: B60T 8/00
Метки: противоблокировочное, средств, транспортных
...элемент ИЛИ 19.1,элемент 20.1 сравнения, элемент 21.1задержки,Блок 10 питания и сигнализации содержит элемент 22 задержки, источ ник 23 питания и сигнальную лампу 24 и является единым дпя всех регулирующих узлов,Регулирующий узел первого колесаи блок 9.2 контроля параметров второго колеса размещены на плате 25.1,а регулирующий узел второго колесаи блок 9.1 контроля параметров первого колеса размещены на плате 25.2.Противоблокировочное устройствоработает спедующим образом,С датчиков 1.1 динамического состояния ведомого колеса 2.1 сигнал,пропорциональный скорости, поступаетна формирователи 3.1. С выхода формирователя 3.1 сигнал поступает навход блока 9,1 контроля, на входдатчика 11.1 ускорения, элемента 6.1сравнения и блока 4,1...
Устройство для програлгл1ного контроля регистрации процессовi2

Номер патента: 432339
Опубликовано: 15.06.1974
Автор: Кубарский
МПК: G01D 18/00, G05B 23/00
Метки: програлгл1ного, процессовi2, регистрации
...очередного тактового импульса в блок опроса 2, а также на систехту 23 запуска и вращения цифрового бараоана,и протяжки печатающего блока 19.Таким образом, осуществляется блокирование счетчиков 3 и 4 в блоке опроса 2, а после запуска ц,достижения двигателем печатающего блока 19 номинальных оборотов с выхода генератора 24 синхроннзипуоцнх импульсов поступают в счетчик 26 кодов, управляющий бчок 27, узел 28 контроля совпадения цифр и усилителей г 1 ечати соответственно вхпульсы начала, синхронизации и конца печати. Импульсом начала печати от 5 20 25 30 35 40 45 50 крывается вход счетчика 26 кодоз. С этого момента осуществляется печать далньх контрольной точки, синхронизируемая соответствующими импульсами генератора 24 синхронизируощих...
Селектор серий импульсов по дли-тельности

Номер патента: 813768
Опубликовано: 15.03.1981
МПК: H03K 5/26
Метки: дли-тельности, импульсов, селектор, серий
...допервого срабатывания К-го разрядасчетчика 2. При длительности серии,импульсов, равной или большей чем2 " " Т, каждый входной импульс, номеркоторого кратен 2 " ", вызывает переключение К"го разряда счетчика 2. Импульсы с инверсного и прямого выходов К-го разряда счетчика 2 поочередно подаются соответственно на второйи третий входы селектора 3 максимальной длительности. При этом импульсыс прямого выхода К-го разряда счетчика 2 подаются на элемент задержкиб и первый вход второго элемента Иэлемента 2 И-ИЛИ 7, а импульсы с инверсного выхода К-го разряда счетчика 2 поступают на первый вход первого элемента И элемецта 2 И-ИЛИ 7, ичерез элемент И 10, на первый входкоторого поступает разрешающий потенциал с единичного выхода триггера 1,на...
Предыдущий патент: Цифровая динамическая следящая система
Следующий патент: Автомат-настройщик для систем управления
Случайный патент: Распорная траловая доска