Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 881657
Авторы: Зубарькова, Кошевой, Лысенко, Пиевский, Стеклов

Текст
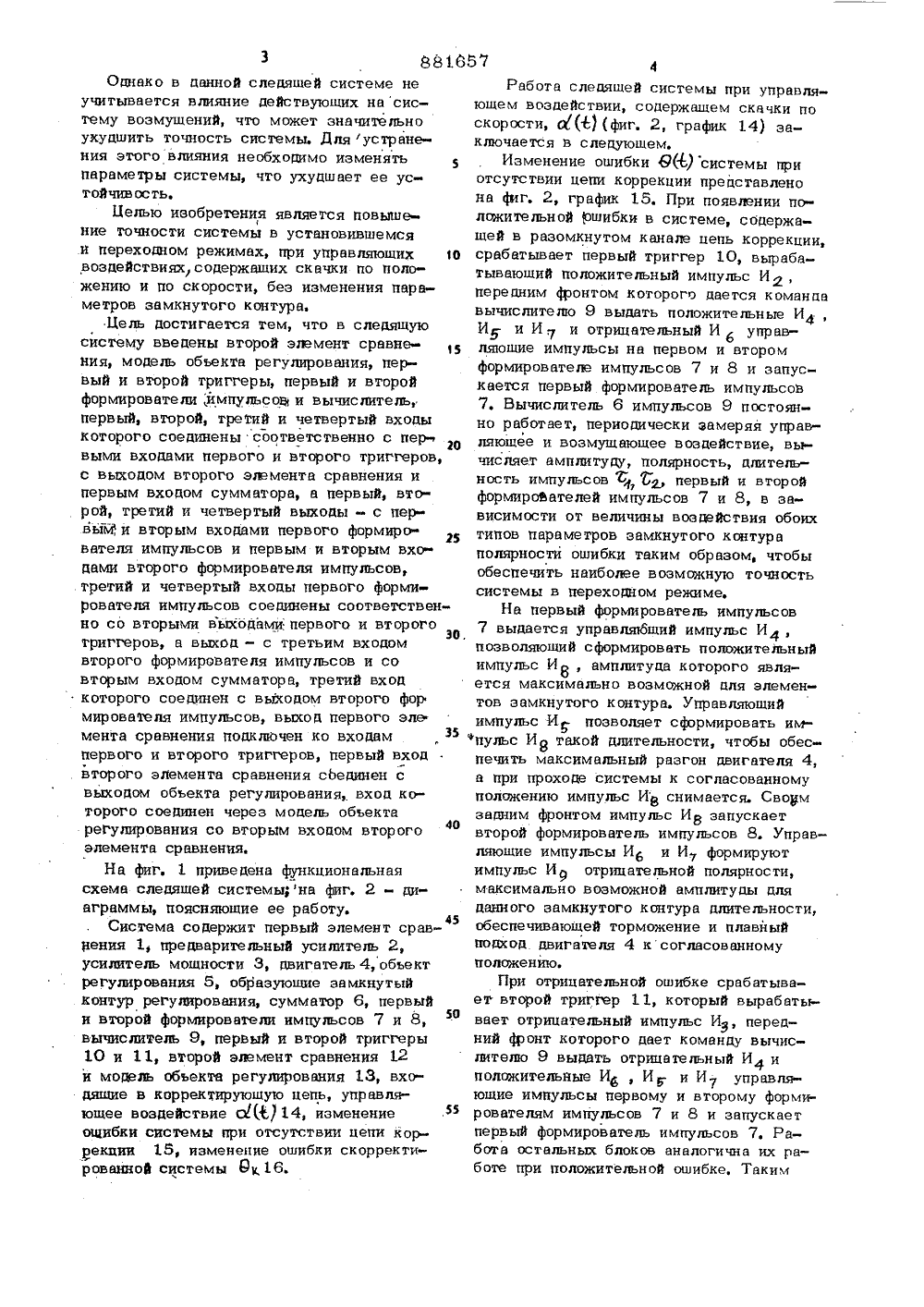
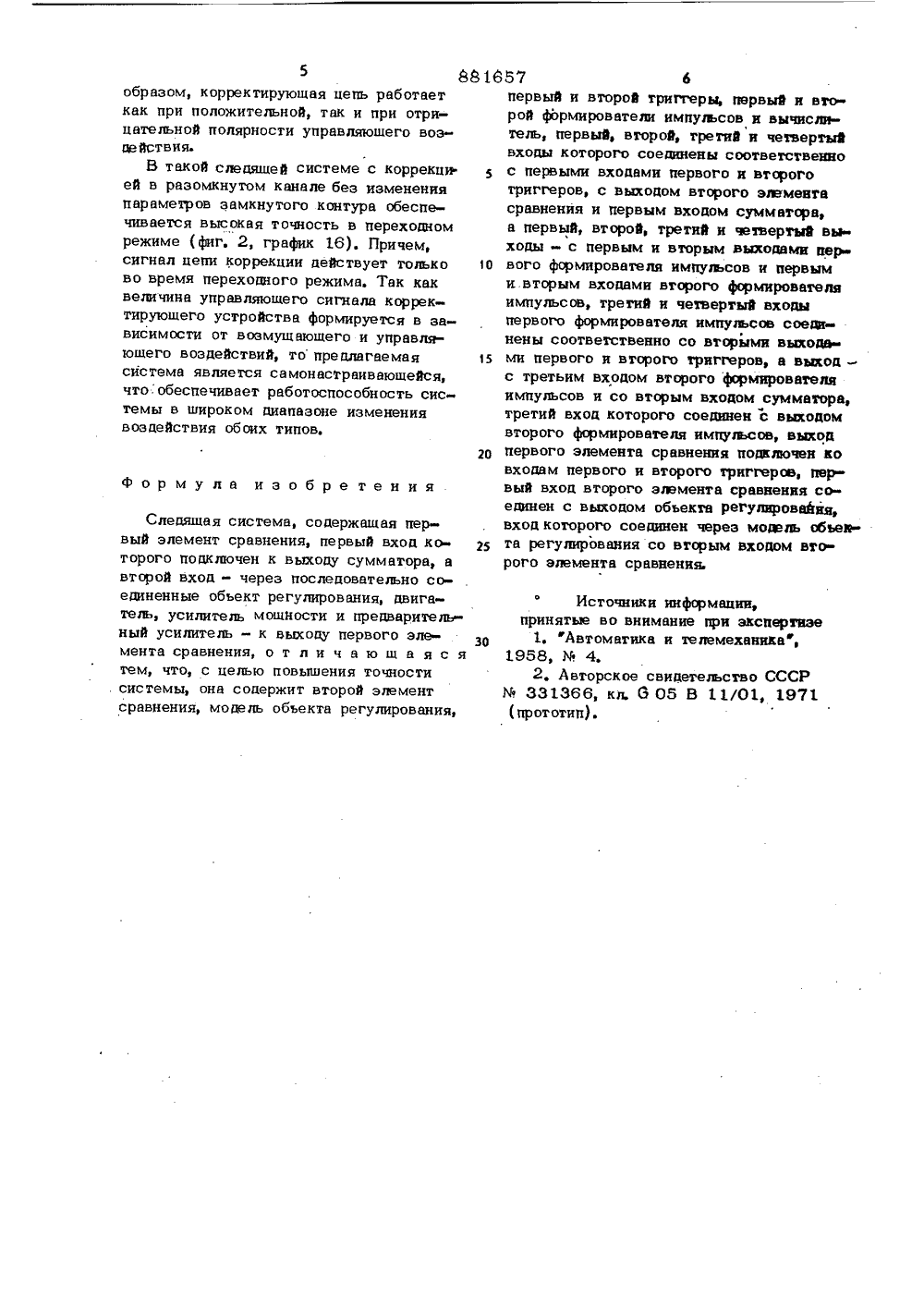
) СЛЕДЯЩ Однак шей сист реходной и не изб миссной регулиро буемых п ном и ус Изобре тен ческому регу пользовано в женных раз мушаюших О( звенья следя получить пе регулирования димости компро того контура получения йре. в переход.к автоматиожет быть истемах, подвертвиям - возшихо, соению и по скоие относитсялированию и мследящих сисличным воздеВ:И,) и управляюачки по полож коррекмы непроцесс тир уюшие позволяютбез пере т необхо и замкну условия й качества ихся режимах. строй ания изоказателетая овивш де рости.Известна следящая система, которая содержит замкнутый контур регулирования с целью коррекции. Замкнутый контур ре;гулированйя содержит цифференцируюшее звено, усилитеть, исполнительный элемент и объектрегулирования, Цепь коррекции включает в себя два нелинейных звена и интегрируюшее звено, Введение искусс венных нелинейностей в цепи коррекции позволяет за счет изменения параметров автоматического регулирования во время переходного процесса улучшить качество системы. Одним из таких переменных параметров является коэффициент усиления дифференцируюшего звена, скачкообразно изменяемый во время переходного процесса 111,Наиболее близкой по технической сущ ности к изобретению является следящая система, содержвшая первый элемент сравнения, первый вход которого подкаочен к выходу сумматора, а второй вход- через последовательно соединенные обьект регулирования, двигатель, усилитель мощности и предварительный усилитель - к 1 выходу первого элемента сравнения, Эта система обеспечивает достаточно высокую точность в переходном режиме при управ ляюшем воздействии типа скачка, что достигается за счет цепи коррекции в разомкнутом канаж, срабатываюшей только от данного управляющего воздействия 1,2).Однако в данной следяшей системе не учитывается влияние действующих на систему возмушений, что может значительно ухудшить точность системы. Для устранения этого влияния необходимо изменять параметры системы, что ухудшает ее устойчив ость.Целью изобретения является повыш ние точности системы в установившемся и переходном режимах, при управляющих 1 О воздействиях, содержащих скачки по положению и по скорости, без изменения параметров замкнутого контура.Цель достигается тем, что в следящую систему введены второй элемент сравнения, модель обьекта регулирования, первый и второй триггеры, первый и второй формирователи,импульсоц и вычислитель, первый, второй, третий и четвертый входы которого соединены соответственно с пер выми входами первого и второго триггеров, с выходом второго элемента сравнения и первым входом сумматора, а первый, второй, третий и четвертый выходы - с первым, и вторым входами первого формирователя импульсов и первым и вторым вхо дами второго формирователя импульсов, третий и четвертый входы первого формирователя импульсов соединены соответственно со вторыми выходами: первого и второгоЗО триггеров, а выход - с третьим входом второго формирователя импульсов и со вторым входом сумматора, третий вход которого соединен с выходом второго фор мирователя импульсов, выход первого эле мента сравнения подключен ко входам первого и второго триггеров, первый вход второго элемента сравнения сЬединен с выходом обьекта регулирования, вход которого соединен через модель обьекта регулирования со вторым входом второго40 элемента сравнения.На фиг. 1 приведена функциональная схема следящей системы;на фиг. 2 - диаграммы, поясняющие ее работу.43Система содержит первый элемент сравНения 1 предварительный усилитель 2, усилитель мощности 3, двигатель 4, обьект регулирования 5, образуюшие замкнутый контур регулирования, сумматор 6, первый и второй формирователи импульсов 7 и 8,50 вычислитель 9, первый и второй триггеры 10 и 11, второй элемент сравнения 12 и модель обьекта регулирования 13, входящие в корректируюшую цепь, управляющее воздействие ЫЩ 14, изменение ощибки системы при отсутствии цепи коррекции 15, изменение ошибки скорректированной системы Ок 16. 88 И 574Работа следящей системы при управляющем воздействии, содержашем скачки поскорости, о (фиг, 2, график 14) заключается в следующем.Изменение ошибки 9 системы приотсутствии цепи коррекции представленона фиг. 2, график 15. При появлении положительной (ошибки в системе, содержащей в разомкнутом канале цепь коррекции,срабатывает первый триггер 10, вырабатывающий положительный импульс И,передним фронтом которого дается командавычислителю 9 выдать положительные ИИ; и И 7 и отрицательный И 6 управляюшие импульсы на первом и второмформирователе импульсов 7 и 8 и запускается первый формирователь импульсов7. Вычислитель 6 импульсов 9 постоянно работает, периодически замеряя управляющее и возмушаюшее воздействие, вычисляет амплитуду, полярность, шщтельность импульсов ,первый и второйформирователей импульсов 7 и 8, в зависимости от величины воздействия обоихтипов параметров замкнутого контураполярности ошибки таким образом, чтобыобеспечить наиболее возможную точностьсистемы в переходном режиме.На первый формирователь импульсов7 выдается управцпбший импульс И 4,позволяюший сформировать положительныйимпульс И, амплитуда которого является максимально возможной для элементов замкнутого контура. Управляющийимпульс И позволяет сформировать им+пульс Ив такой длительности, чтобы обеспечить максимальный разгон двигателя 4,а при проходе системы к согласованномуположению импульс И снимается. Своимзадним фронтом импульс И запускаетвторой формирователь импульсов 8, Управляющие импульсы И 6 и И формируютимпульс И отрицательной полярности,максимально возможной амплитуды дляданного замкнутого контура длительности,обеспечивающей торможение и плавныйподход двигателя 4 к согласованномуположению.При отрицательной ошибке срабатывает второй триггер 11, который вырабатывает отрицательный импульс И, передний фонт которого дает команду вычислителю 9 выдать отрицательный И 4 иположительные И, И- и И 7 управляющие импульсы первому и второму формирователям импульсов 7 и 8 и запускаетпервый формирователь импульсов 7. Работа остальных блоков аналогична их работе при положительной ошибке, Таким81657 6первый и второй триггеры, первый и второй формирователи импульсов и вычислитель, первый, второй, третий и четвертый входы которого соединены соответственно с первыми входами первого и второго триггеров, с выходом второго эа.мента сравнения и первым входом сумматора, а первый, второй, третий и четвертый вы ходы - с первым и вторым выходами пер о вого формирователя импульсов и первыми вторым входами второго формирователя импульсов, третий и четвертый входы первого формирователя импульсов соеди иены соответственно со вторыми выхода 1 ь ми первого и второго триггеров, а викодс третьим входом второго формирователя импульсов и со вторым входом сумматора, третий вход которого соединен с выходом второго формирователя импуа сов, выход первого элемента сравнения подключен ко входам первого и второго триггеров, первый вход второго элемента сравнения соеащен с выходом обьекта регулировайня, вход которого соединен через модель обьеи та регулирования со вторым входом втоффрого элемента сравнения. Следящая система, содержащая первый элемент сравнения, первый вход ко торого подключен к выходу сумматора, а второй вход - через последовательно соединенные объект регулирования, двигатель, усилитель мошйости и предварительный усилитель - к выходу первого элемента сравнения, о т л и ч а ю ш а я с я тем, что, с целью повышения точности системы, она содержит второй элемент сравнения, модель обьекта регулирования,5 й образом, корректирующая цепь работает как при положительной, так и прн отрицательной полярности управляющего возде йстви я.В такой следящей системе с коррекци. ей в разомкнутом канале без изменения параметров замкнутого контура обеспечивается высокая точность в переходном режиме (фиг. 2, график 16). Причем, сигнал цепи коррекции действует только во время переходного режима. Так как величина управляющего сигнала корректирующего устройства формируется в зависимости от возмущающего и управляющего воздействий, то предлагаемая система является самонастраивающейся, что.обеспечивает работоспособность системы в широком диапазоне изменения воздействия обоих типов. формула изобретения Источники информации,принятые во внимание при экспертизе 1. Автоматика и телемеханикаф,1958, И 4,2. Авторское свидетельство СССР М 331366, кл, 8 05 В 11/01, 1871
СмотретьЗаявка
2890489, 25.12.1979
ПРЕДПРИЯТИЕ ПЯ В-8117
ЗУБАРЬКОВА ЛЮДМИЛА ЛЕОНИДОВНА, КОШЕВОЙ АНАТОЛИЙ АНДРЕЕВИЧ, ЛЫСЕНКО НИКОЛАЙ ФЕДОРОВИЧ, ПИЕВСКИЙ ВЛАДИМИР МОИСЕЕВИЧ, СТЕКЛОВ ВАСИЛИЙ КУПРИЯНОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: следящая
Опубликовано: 15.11.1981
Код ссылки
<a href="https://patents.su/4-881657-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Устройство для выделения первого импульса и вычитания первого импульса из последовательности импульсов

Номер патента: 439804
Опубликовано: 15.08.1974
МПК: G06F 7/38
Метки: выделения, вычитания, импульса, импульсов, первого, последовательности
...выходе25 схемы 3 единичный потенциал, запрещая прохождение первого импульса последовательности,Поставленна входныхвходом первпервой схемчерез схемудом первогоса соединенгера и с И - НЕ, улевым в торой схе входом пер Предм зобрете О Устройство для выделения первого импуль. са и вычитания первого импульса из последоИзобретение относится к области вычислиельной техники и может быть использовано, частности, при создании пересчетных устойств. Известная схема для выделения первого импульса, содержащая два триггера с раздельными входами, выполненные на элементах И - НЕ, и логическую схему И - НЕ, имеет следующие недостатки: неоднозначная начальная установка устройства импульсами сброса, возможность выделения импульса последовательности в...
Устройство для выделения первого импульса из серии

Номер патента: 1014134
Опубликовано: 23.04.1983
Автор: Климов
МПК: H03K 5/153
Метки: выделения, импульса, первого, серии
...упрощение 30 устройства и расширение функцио" нальных возможностей, а именно: обеспечение вычитания первого импульса иэ,серии.Поставленная цель достигается тем, что в устройство для выделенения первого. импульса из серни, ссдержащее триггер, я-вход которого соединен с шиной сигналов управления, и шину серии импульсов, введен коммутатор б с запоминанием 40 сигнала управления, вход управлейия которого подключен к выходу триггерар К-вход которого соединен с первой выходйой шиной.и первым выходом коммутатора с запоминанием 45 сигнала управления, второй выход которого соединен с второй выходной шиной, а вход коммутации подключен к шине серии импульсов. На фиг,1 приведена структурная схема устройства; на фиг.2.временные диаграммы,...
Устройство для выделения и вычитания первого импульса из серии

Номер патента: 1718372
Опубликовано: 07.03.1992
Авторы: Авагимов, Максимов, Носко
МПК: H03K 5/153
Метки: выделения, вычитания, импульса, первого, серии
...содержит генератор 1 импульсов, выход которого соединен со счетным входом первого счетчика 2, подключенного своими выходами к первой группе входов элемента 3 сравнения, вторая группа входов которого соединена с выходами регистра 4, входы которого соединены с выходами измерителя 5 временных интервалов, второй вход которого подключен к выходу формирователя 6, вход которого соединен с выходом первого элемента 2 И 7, первый вход которого подключен к инверсному выходу первого асинхронного триггера. Я-вход которого соединен с выходом формирователя 6, а прямой выход - с первым входом второго элемента 2 И 9, второй вход которого подключен к второму входу первого элемента 2 И 7 и к выходу третьего элемента 2 И 10, второй вход которого...
Устройство для выделения первого импульса из серии

Номер патента: 984024
Опубликовано: 23.12.1982
МПК: H03K 5/22
Метки: выделения, импульса, первого, серии
...приходом последовательности радиоимпульсов первый импульс пачки.проходит на выход элемента И 2. Задним фронтом этого импульса триггер1 перебрасывается в единичное состояние, при.этом на 1-К входы триггера1 с выхода 5 подается нулевой потенциал. Триггер 1 блокируется и нереагирует на остальные импульсы первой пачки, которые не проходят навыход элемента И 2. Кроме того, задним фронтом первого импульса на входы делителя б записывается нулевойкод с выходов счетчика 5, а этим жефронтом, несколько задержанным, производится установка счетчика 5 всостояние, соответствующее коду некоторого числа (например,1 или 2),После установки триггера 1 в единичное состояние на втором входе элемента И 4 имеет место единичный потенциал, и на счетные...
Устройство для оценки отношения корреляционных моментов второго и первого порядков

Номер патента: 1244678
Опубликовано: 15.07.1986
МПК: G06G 7/19
Метки: второго, корреляционных, моментов, отношения, оценки, первого, порядков
...процессов х.) и у1 с 1 1,К - -Т1с 1 ь 1 ь- ЮОгде р - ноРмиРованная взаимокор.реляционная функция процессов.Целью изобретения является повышение точности устройства,Параметр К является самостоятельной характеристикой форм взаимокорреляционной функции р) . Кроме того,если у с) . -) и ) х с - и) йи, т . е . ее.оляется выходом линейного звена с импульсной характеристикой Ь(о), топодставляя, производя замену перемен.ных, можно показать, чтоМг Ь) Мо(Ь) Мг(х)К = +ЖМ,(Ь) ЙО) М,(х)где М (Ь) = и"Ь(ц)йгг, - моменты имипульсной характеристики;1;:М(х) =1К (т)ДФ - момент корре)оляционной функции Квходного проацесса х,Таким образом, имеется воэможностьоценивать параметр линейного звена,что весьма важно при диагностике, ресурсных испытаниях,...
Предыдущий патент: Устройство для группового управления печными трансформаторами
Следующий патент: Система управления регулирующим органом
Случайный патент: Заменитель цельного молока для молодняка сельскохозяйственных животных и способ его приготовления