Устройство для управления много-координатными технологическимиагрегатами
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 811220
Авторы: Дружин, Жуковский, Твердохлебов




Текст
1 1) ЗИ 220 ОП ИСАН И Е ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(43) Опубликовано 1. Бюллетеньо делам изобретений и открытий5) Дата опубликования описания 07.03.81 72) Авторы изобретен хлебов р, ,(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯОГОКООРДИНАТНЪМИ ТЕХНОЛОГИЧЕСКИМИ АГРЕГАТАМИ Изобретение относится к автоматике и вычислительной технике и предназначено для использования в автоматизированных системах программного управления много- приводными агрегатами,Известно устройство для управления многокоординатными технологическими агрегатами (1, Свойственная ему недостаточная точность обусловлена неравномерностью следования выходных импульсов.Наиболее близким к изобретению техническим решением является устройство для управления многокоординатными технологическими агрегатами, содержащие вычислительный блок, входы которого подключены к адресному регистру, соединенному одним входом с выходом элемента И, а первый выход через исполнительный регистр подключен к входам управляемых приводов, и генератор импульсов, не обладающее повышенной точностью работы из-за нестабильности частоты выходных командных импульсов и невозможности программно управлять временем отработки заданных перемещений по координатам 12.Отличием описываемого устройства является то, что оно содержит первые и вторые дополнительные элементы И по числу управляемых приводов, элемент ИЛИ и параллельные цепи по числу управляемых приводов, каждая нз которых состоит нз включенных последовательно счетчика, третьего дополнительного элемента И и реверсивного счетчика, выход которого соединен 5 с соответствующим входом адресного регистра, причем первые н вторые входы первых дополнительных элементов И подключены соответственно к второму выходу вычислительного блока и выходам соответствующих 10 третьих дополнительных элементов 11, соединенных другими входами с выходом генератора импульсов, а выходы первых дополнительных элементов И подключены через элемент ИЛИ к одним входам вторых до полнительных элементов И, соединенныхдругими входами с соответствующими выходами адресного регистра и выходами - с другими входамн соответствующих реверспвных счетчиков, а третий выход вычисли тельного блока соединен через счетчики свходами основного элемента И.Это позволяет повысить точность устройства.На фиг. 1 показана функциональная схе ма устройства; на фиг. 2 - таблица управляющих слов.В состав схемы входят вы:нслнтельнь.йблок (ЦВМ) 1, адресный регитр 2, таймер 3, первые дополнительные элементы И 4, 30 генератор 5 импульсов, исполнительный(выходпоп) рсгистр 6, основной элемент И 7, элемент ИЛИ 8, счетчики 9, реверспвные счетчики 10, соответственно третьи и вторые дополнительные элементы И 11 и 12.Устройство работает следующим ооразом.Управляющие импульсы с выходного регистра 6 формируются при поступлении на его вход из ЦВМ 1 управляющих слов из таблицы, которая составляется ЦВМ 1 для каждого кадра программы, содержащего заданные величины приращения положения по координатам (ЛХ, ЛУ, ЛЛ), знаки прирацения (предположим, что приращсния положения по координатам Х и Я имеют знак плюс, а по координатам У - минус) и время отработки кадра Тк. Для принятых исходных данных таблица управляющих слов приведена на фиг, 2.каждые два разряда в управляющем слове закреплены за координатами управляемого технологического агрегата в следующей последовательности. Первые два разряда - за координатой 7, вторые - за координатой У, третьи - за координатами Х, Наличие единицы в первом из каждых двух разрядов является признаком перемещения по координате на единицу дискретности в положительном направлении, наличие единицы во втором из каждых двух разрядов является признаком перемещения в отрицательном направлении.Таблица управляющих слов состоит из двух столоцов. Второй столбец содержит управляющие слова, представляющие собой возможные сочетания управляющих воздействий по координатам с учетом знаков приращений. Число возможных сочетаний управляющих слов равно 2 - 1, где- количество координат движения. В нашем случае число управляющих слов равно семи. Элсментамп первого столбца таблицы являются адреса управляющих слов (в нашем случае трехразрядные числа). Лдреса формируются следующим образом: если управляющее слово содержит признак перемещения по координатам Х, то в младший разряд адреса записывается единица, сслп по координате У - то единица записывается во второй разряд, если по координате Л - то в третий.При интерполяции кадра программы количество управляющих слов, подаваемых на выход системы, равно величине приращения положения по координате, для которой оно является максимальным по сравнению с остальными, а период выдачи управляющих слов равен времени отработки кадра, деленному на величину максимального пз заданных приращений в кадре. Моменты выдачи управляюгцпх слов определяются по сигналам таймера 3, а выоор того или иного управляющего слова пз таблицы на каждом шаге интерполяции осуществляется в соответствии с адресом, выставляемым на выходе адресного регистра 2. Формирование кода адреса производится путем вычисления в реверспвпых счет пках 10 значсшгй оценочных функций для каждой координаты. 1(аждая из параллельных цепей, состоящих из последовательно соединенных счетчика 9, третьего дополнительного элемента И 11 и реверсивного счетчика 10, закреплена за определенной координатой управляемого технологического агрегата. На выходе реверсивного счетчика 10 формируется сигнал логической единицы, если его содержание равно или больше нуля.В начале отработки каждого кадра про граммы ЦВМ 1 определяет координату,имеющую максимальное приращение (предположим, что это ЛУ), вычисляет код таймера 3, соответствующий интервалу времени между выдачами управляющих слов, 20 равному Тк/ЛУ и устанавливает устройствов исходное состояние (шины установки в исходное состояние на фиг. 1 не показаны).При этом счетчики 9 и реверсивные счетчики 10 обнуляются. При обнулении счетчи ков 9 на их выходе формируются сигналы,поступающие на входы основного элемента И 7 и входы третьих дополнительных элементов И 11, Выходной сигнал элемента И 7 стробирует занесение единиц с выходов ЗО реверсивных счетчиков 10 в адресный регистр 2, выходные сигналы которого открывают вторые дополнительные элементы И 12.Выходные сигналы счетчиков 9 запирают третьи дополнительные элементы И 11, 35 Одновременно по второй выходной цзине изЦВМ 1 поступает сигнал признака координаты, имеющий максимальное приращение, который открывает один из первых дополнительных элементов И 4, соединенный с 40 выходом счетчика 9, закрепленного за координатой У (в нашем примере максимальное приращение имеет координата У). В оощем случае максимальное приращение положения может иметь любая координата.45 На первом шаге интерполяции ЦВМ 1запускает таймер 3, а в счетчики 9 в инверсном коде заносит аосолютные величины приращений по координатам. При этом выходные сигналы обнуления счетчиков 9 сни маются и через открытые третьи дополнительные элементы И 11 с выхода генератора импульсов 5 на счетные входы счетчиков 9 и суммирующие входы рсвсрснвных счетчиков 10 начинают проходить импульсы, 55 Одновременно выходные импульсы среднегопз элементов И 11 через открытый первый дополнительный элемент И 4, элемент ИЛИ 8 и открытые вторые дополнительные элементы И 12 поступают на вычитающие вхо.60 ды реверсивных счетчиков 10. Импульсычерез элементы И 11 будут проходить до тех пор, пока пе обпулятся соответствующие счетчики 9. После завершения цикла формирования адреса, признаком чего яв ляется обнуление всех счетчиков 9, в ревер 811220так как ДХ(ДУ так как ЬЛ:. ду. сивных счетчиках 10 получатся значения оцено иных функций первого шага интерполяцииРх, = - (Л У + 1) + ДХ + 1О,Рг, = .". У + 1 - (Д У + 1) = О; Р, -- (Л У + 1) + Л + 1 - О, Таким образом, на первом шаге интерполяции на установочных входах адресного регистра 2 сформируется двоичный код 010. Сигнал совпадения сигналов обнуления счетчиков 9 с выхода основного элемента И 7 стробирует занесение кода адреса первого управляющего слова в адресный регистр 2.После отработки таймером 3 заданного интервала времени ЦВМ 1 по сигналу таймера 3 считывает код адреса и выдает по третьей выходной шине на вход выходного регистра б соответствующее управляющее слово из таблицы, На выходе системы формируется импульс, поступающий по каналу У на вход соответствующего следящего привода.На втором шаге интерполяции процесс формирования адреса происходит аналогично, но теперь выходные сигналы адресного регистра 2 запрещают прохождение импульсов на вычитающие входы реверсивных счетчиков 10 координат Х и Л, поэтому в конце второго цикла формирования адреса в реверсивных счетчиках 10 получатся значения оценочных функций, равные Рх, =. Рх, + ДХ+ 1 .= 2 ЬХ+ 1 - (Д У+ 1);Рг,. - .: О;Г = Г + ДЛ+1 = 2 ДЛ+ 1 - : У+ 1),В зависимости от знаков оценочных функций на выходе адресного регистра 2 формируется адрес второго управляющего слова, которое выдается на выход системы по второму сигналу таймера 3. Процесс выдачи управляющих слов продолжается до тех пор, пока число сигналов от таймера 3 не станет равным заданному приращению по координате У, что является признаком отработки данного кадра.На каждом шаге интерполяции при вычислении значений оценочных функций выполняется следующее правило; если па предыдущем шаге интерполяции значение оценочной функции было отрицательным, то на данном шаге интерполяции импульсы проходят только на суммирующий вход соответствующего реверсивного счетчика 10, а если на предыдущем шаге значение оценочной функции было равно или больше нуля,5 0 15 20 25 Зо 35 40 45 50 55 65 то импульсы проходят на оба входа реверсивного счетчика 1 О, причем на суммирующий вход поступает число импульсов, равное приращению положения по данной координате, увеличенному на единицу, а на вычитающий вход - число импульсов, равное увеличенному на единицу приращению положения по координате, для которой заданное приращение положения в данном кадре имеет максимальное значение по сравнению с остальными,При отработке программы управления число командных импульсов на выходе системы по каждой координате равно заданному в каждом кадре, а неравномерность их следованпя не превышает интервала времени между выдачами управляющих слов.Для обеспечения согласованной работы по времени необходимо, чтобы процесс формирования адреса на каждом шаге интерполяции завершался ран. ше появления сигнала таймера 3. Для этого должно соблюдаться неравенствоУгУмаас Р малс + 1)где , - частота генератора 5;ма 1;с - максимальная частота управляющих импульсов на выходе системы;Лм - максимальное значение задаваемых в кадре приращений положения по координате.Наличие в системе таймера 3, определяющего момент выдачи управляющих воздействий системой, позволяет простым преобразованием задаваемого ему кода варьировать скоростью отработки заданной программы и осуществлять разгон и торможение исполнительных органов управляемого технологического агрегата по любому требуемому закону. Формула из о бретенп я Устройство для управления многокоординатными технологи;ескими агрегатами, содержащее вычислительный блок, входы которого подключены к адресному регистру, соединенному одним входом с выходом элемента 11, а первый выход через исполнительный регистр подключен к входам управляемых приводов, и генератор импульсов, отличающееся тем, что, с целью повышения точности устройства, оно содержит первые и вторые дополнительные элементы И по числу управляемых приводов, элемент ИЛИ и параллельные цепи по числу управляемых приводов, каждая из которых состоит нз включенных последовательно счетчика, третьего дополнительного элемента И и реверсивного счетчика, выход которого соединен с соответствующим входом адресного регистра, причем первые и вторые входы первых дополнительных эле ментов И подключены соответственно ко811220 к к Составитель С. Хлебниковдактор Е, Гончар Техред О. Павлова Корректор 3. Тарасова Заказ 505/14 Изд.232 Тираж 940 НПО Поиск Государственного комитета по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., ПодписноеССР г. Г Типография, пр. Сапунова, 2 второму выходу вычислительного блока и выходам соответствующих третьих дополнительных элементов И, соединенных другими входами с выходом генератора импульсов, а выходы первых дополнительных элементов И подключены через элемент ИЛИ к одним входам вторых дополнительных элементов И, соединенных другими входами с соответствующими выходами адресного регистра и выходами - с другими входами соответствующих реверсивных счетчиков, а третий выход вычислительного блока соединен через счетчики с входами основного элемента И. 5 Источники информации, принятые во внимание прн экспертизе 1. Авторское свидетельство СССР5 б 2797, кл, Ст 05 В, 19/18, 1977.10 2. Патент США3798424, кл, Ст 05 В19/18, 1975.
СмотретьЗаявка
2699867, 22.12.1978
ПРЕДПРИЯТИЕ ПЯ А-1081
ДРУЖИН ВЛАДИМИР НИКОЛАЕВИЧ, ЖУКОВСКИЙ ВЛАДИМИР ГРИГОРЬЕВИЧ, ТВЕРДОХЛЕБОВ НИКОЛАЙ ФИЛИППОВИЧ
МПК / Метки
МПК: G05B 19/418
Метки: много-координатными, технологическимиагрегатами
Опубликовано: 07.03.1981
Код ссылки
<a href="https://patents.su/4-811220-ustrojjstvo-dlya-upravleniya-mnogo-koordinatnymi-tekhnologicheskimiagregatami.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления много-координатными технологическимиагрегатами</a>
Управляемый формирователь импульсов
Номер патента: 1622928
Опубликовано: 23.01.1991
Автор: Антимиров
МПК: H03K 3/72
Метки: импульсов, управляемый, формирователь
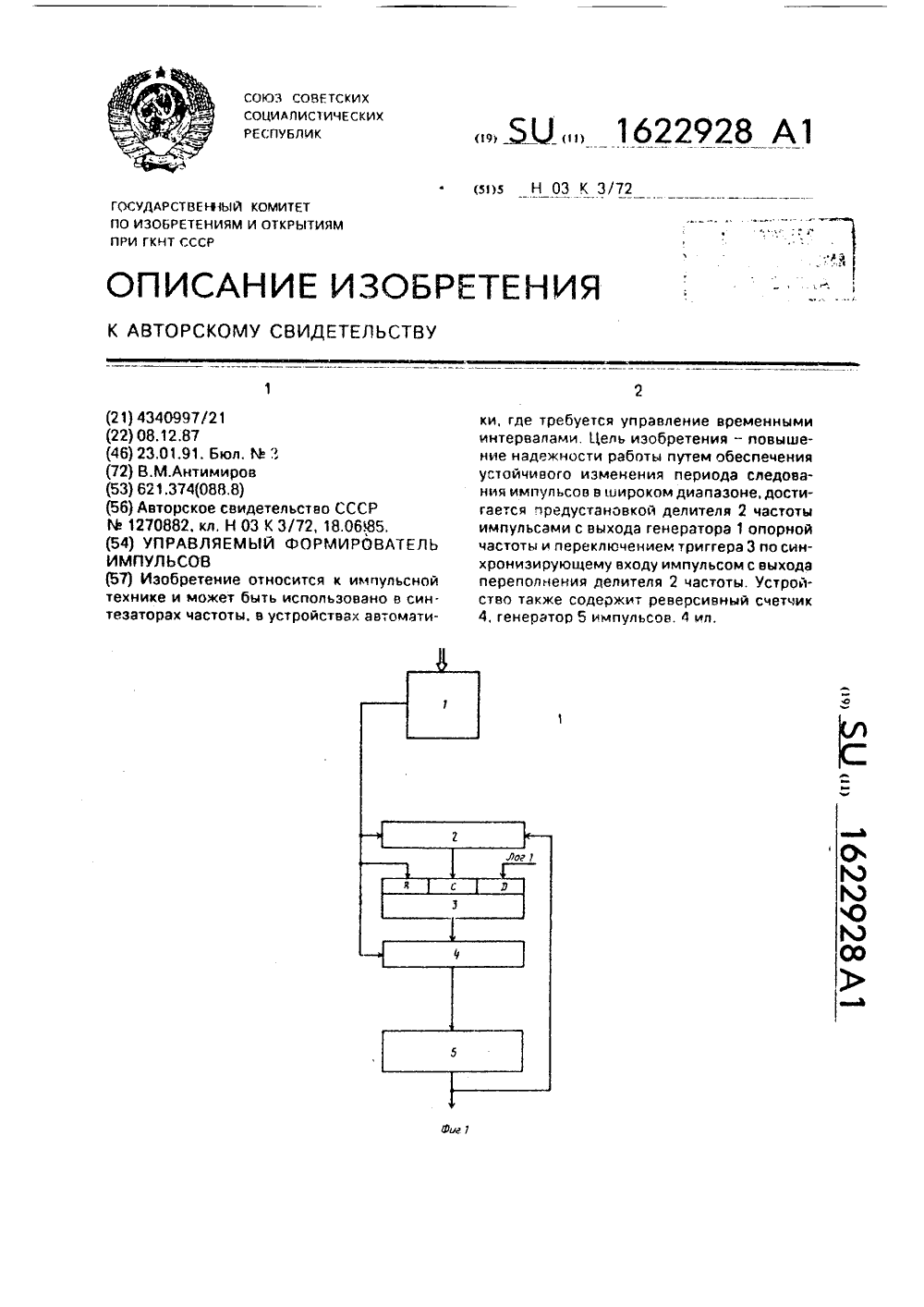
...сформиро анной последовательности импульсое используется е качестве опорного интервала времени.В начальный момент времени частота импульсов генератора 5 может быть любой из диапазона возможных значений,Делитель 2 имеет фиксированный коэффициент пересчета, в соответствии с которым формирует выходную последовательность импульсов.На счетный вход реверсивного счетчика 4 и вход установки в "О" делителя 2 и триггера 3 поступают импульсы с генератора 1, 1622928задающие опорный временной интервал.Допустим, что в опорный интервал временидолжно укладываться 64 выходных импульса устройства, т.е. коэффициент деления делителя 2 равен 64. Делитель 2 считываетимпульсы, поступающие на его вход, Еслисигнал окончания счета переполнения появляется на его...
Управляемый генератор импульсов
Номер патента: 432662
Опубликовано: 15.06.1974
Авторы: Розенберг, Руткевич, Ско
МПК: H03K 3/72
Метки: генератор, импульсов, управляемый
...с выхода триггера управления закрывает элемент И - НЕ, и поступление импульсов с выхода кварцевого генератора насчетный вход триггера б счетчика прекра,щается. В момент перехода триггера управления из состояния 1 в состояние 0 на 10его выходе возникает перепад напряжения; такой же перепад напряжений возникает на выходах тех схем совпадения 71 - 7, на вторыхвходах которых имеются логические сигналы1, Перепады напряжений на выходах схем 15совпадений 7, - 7 устанавливают триггеры51 - бв состояние 1 в тех разрядах, в которых уже имеется состояние 1,Таким образом, после переполнения счетчика импульсов в триггеры б - бзаписывается код числа, ймеющегося на выходе цифрового функциоттального преобразователя 8кода.Процесс повторяется...
Управляемый генератор импульсов

Номер патента: 847497
Опубликовано: 15.07.1981
Авторы: Мишин, Олеринский
МПК: H03K 3/72
Метки: генератор, импульсов, управляемый
...введены счетчик и делитель, вход которого подключен к выходу инвертора, а выход через счетчик соединен со входом дешифратора.На чертеже представлена блок-схема генератора импульсов.Управляемый генератор импульсов содержит инвертор 1, линию 2 задержки, элементы И 3 - 1, 3 - 2,3 - п (где и - целое число), элемент ИЛИ 4, дешифратор 5, счетчик 6, делитель 7 частоты.Генератор работает следующим образом.Автоматическое переключение режимовработы генератора по заданной программе производится с помощью делителя 7 часто ты и счетчика 6. Делитель 7, включенныйв цепь обратной связи, осуществляет деление выходной частоты до значения, указанного программой, задающей необходимый847497 елен иЯ Составитель М, ЛеонТехред А. БобкасТираж 988И...
Управляемый генератор импульсов
Номер патента: 739714
Опубликовано: 05.06.1980
Авторы: Гаврюшенко, Фишер
МПК: H03K 1/18
Метки: генератор, импульсов, управляемый
...10,выходы которого соединены со входами всехцепочек 6, выходы каждой из которых соедипены с первыми входами соотве 1 ствующихвентилей триггера 9, вторые входы которых подключены к выходам блока 11 управлений, син 1хронизирующие входы которого соединены свыходами инверторов 1,Предлагаемый генератор работает следующим образом,Каждый полупериод начинается с переключения триггера 9, После переключения его импульс на одном из выходов генератора исче"зует ипоявляется на другом выходетолько 45после того, как конденсатор 5 цепочки 3 пере" эарядится до уровня логической единицы, Вэтот момент переключается триггер 10 и всеконденсаторы 8 цепочек 6 одновременно начинают перезаряжаться. Блок 11 в начале каж 50догополупериода синхронно с...
Многоканальный формирователь импульсов для управления пзс регистром

Номер патента: 1387181
Опубликовано: 07.04.1988
Автор: Дик
МПК: H03K 5/01
Метки: импульсов, многоканальный, пзс, регистром, формирователь
...ключевой каскад 1,выход которого подключен к базе выходноготранзистора 2, эмиттер которого соединен свыходной шиной 3 канала многоканальногоформирователя и подключен к соответствующему фазовому электроду управления переносом ПЗС-регистра 4 и через ключ 5 -к первой шине 6 источника питания, приэтом коллекторы выходных транзисторов 2всех каналов соединены между собой, между коллекторами выходных транзисторов2 и второй шиной 7 источника питаниявключен элемент 8 компенсации, в каждомканале между эмиттером и коллектором выходного транзистора 2 включен обратносмещенный диод 9, элемент 8 компенсации,который выполнен в виде параллельно включенных резисторов 10 и последовательной цепочки прямосмещенных диодов 11,емкости 12 - 15 ПЗС-регистра,20...
Предыдущий патент: Линейный интерполятор
Следующий патент: Устройство для создания стабильногоэлектромагнитного поля
Случайный патент: Устройство для очистки внутренней поверхности трубопровода