Система регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 732824
Авторы: Болховитинов, Константинов, Никитин, Червяков
Текст
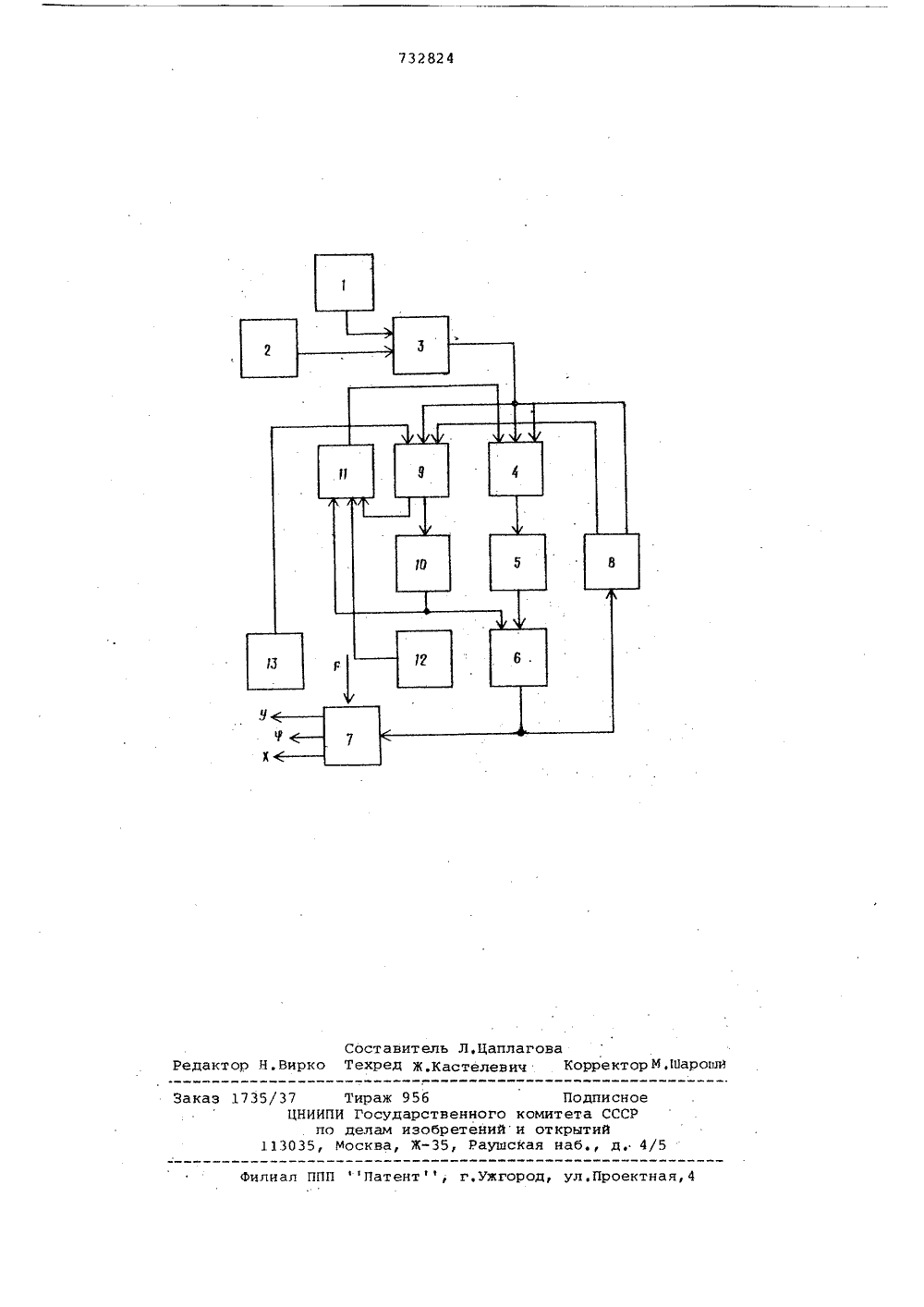
Союз Советсмик Социапистическик Республик(51)М. Кл. С 05 Р 1/00 Государственный комитет СССР по делам изобретений н открытнй(54) СИСТЕМА РЕГУЛИРОВАНИЯ Изобретение относится к судовой автоматике и может быть использовано, например, в устройствах и системах автоматического управления объек тами, имеющими несколько регулирующих органов, в частности для стабилизации в открытом море курса судна при неуправляемом его дрейфе в горизонтальной плоскости под действием возмущений от ветра и теченияИзвестна система автоматического управления, в которой предусматривается применение в цепи обратной связи интегрирующего конденсатора для изменения величины сигнала обратной связи с целью компенсации на руле несимметричных нагрузок (1. Однако для инерционных объектов регулирования, например судов без 20 хода, практически невозможно аппаратурно реализовать цепь с интегрирующим конденсатором для больших постоянных времени процесса регулирования.25Наиболее близкой к изобретению является система автоматического регулирования, в которой устраняются нежелательные колебания курса судна без хода от воздействия волнения 30 путем включения дополнительных фильтров в цепь формирования управляющих сигналов, содержащую первый элемент сравнения, первый блок формирования управляющего сигнала, усилитель и блок регулирующих органов, подключенный через датчик обратной связи ко второму входу первого блока формирования управляющего сигнала, датчик и первый задатчик и бдок выбора регулирующего органа (2.Однако при произвольном изменении курсовых углов максимальных возмущений от ветра и течения система не обеспечивает заданной точности стабилизации при максимальной мощности всех винтов регулируемого шага и колонок, имеющихся на судне для создания стабилизирующего момента по курсу. Целью изобретения является повышение точности системы. Поставленная цель достигается тем, что система содержит последовательно соединенные второй задатчик и второй блок формирования управляющего сигнала и последовательно соединенные третий задатчик и второй элемент сравнения, второй вход которого соединен с выходом первого элемента сравнения,О третий вход - со вторым выходом датчика обратной связи, первый выход -со входом блока выбора регулирующего органа, а второй выход - со вторым входом второго блока Формирования управляющего сигнала, третийвход которого подключен к выходублока выбоРа регулирующего органа,а выход - к третьему входу первогоблока Формирования управляющегосигнала.На чертеже представлена блок-схема системы, которая содержит датчик1 и первый эадатчикрегулируемогопараметра, например курса судна безхода, соединенные со входами первогоэлемента сравнения 3, подключенного14через. первый блок 4 Формированияуправляющего сигнала и усилитель3 к блоку 6 регулирующих органов,состоящему из ряда регулирующих органов типа винта. регулируемого шага 20и рулевой движительной колонки, воз-.действующих на судно 7, чтобы ста-билизировать заданное значение курса.Ч в условиях неуправляемого изменения параметров продольного (Х) и поперечного (У) дрейфа судна под воздействием возмущения Г, Информация осостоянии регулирующих органов через датчик 8 обратной связи поступаетна вход блока 4 формирования управляющего сигнала.Система также содержит второйэлемент сравнения 9, подключенныйчерез блок 10 выбора регулирующегооргана одновременно ко зходу второго блока 11 формирования управляющего сигнала, котооый также подключен ко второму задатчику 12 и ко второму элементу сравнения 9, а выходблока 11 соединен с первым блоком 4Формирования управляющего сигнала, 40второй элемент сравнения 9 подключенк третьему задатчику 13,Система регулирования работаетследующим образом, С датчика 1 сигнал истинного значения регулируемогопараметра, например курса судна безхода при неуправляемом дрейфе в открытом море, поступает на первыйвход элемента сравнения 3, на вто. рой вод которого для выработки сигнала отклонения подается с задатчика 2 требуемое значение параметрарегулирования.Сигнал отклонения с элемента сравненйя 3 поступает в блок 4 для ФормирМания в соответствии с принятымалгОритмом управления сигнала, содержащего в общем случае также составляющие производной и интеграла. Управляющий сигнал с блока 4 через усилитель. 5 воздействует на блок 6, кото рый вырабатывает требуемое значениемомента стабилизации параметра 9 приизменяющихся под действием возмущения Р параметрах Х и У, Величина инаправление этого момента стабилизаЭто обеспечивается путем Формирования в системе двух взаимосвязанных во времени последовательных управляющих воздействий, вырабатываемых элементом сравнения 9, блоками 10, 11 с использованием двух опорных сигналов от задатчиков 12,. 13 и сигналов, Формируемых в блоках 3, 4, 5, 8,Первое управляющее воздействие Формируется в цепи, состоящей из элемента 9 и блока 10, с выхода которого снимается сигнал на второй вход блока 6.формирование этого управляющего воздействия обусловлено решением следующей логической задачи включения в работу органов блока 6: 0 Ърнф д Р дф,где п 1. - последовательность сигкналов на включение(к + 1)-га, блока б приработе в данный моментвремени всех (К+1)органов по стабилизациипараметра ЧдЧ- значение ошибки стабилизации при работе всехпредыдуших органов;заданное значениеошибки;И - число всех органов,имеющихся на судне 7в блоке 6 для стабилизации параметра Ч .Значение ошибки дЧФормируется в элементе сравнения 9 с учетом сигнала, поступающего со второго выхода датчика 8 обратной связи, соответственно по числу (к - 1) включенных в данный момент времени органов управления блока 6, и сигнала текущего значения ошибки дЧ с элементаравнения 3Этот сигнал д.поступает в блок 10 и сопоставляется дно ции контролируются в системе датчиком обратной связи, сигналы с которого поступают на второй вход блока 4, обеспечивая требуемое качество стабилизации при одновременной работе всех регулирующих органов блока 6.В предлагаемой системе автоматического регулирования разработан новый принцип использования регулирующих органов блока 6, обеспечивающий достижение заданной точности стабилизации параметра Ч при всех значениях возмущения Р до Ри во всем диапазоне его .углов встречи с судном, Причем, в соответствии с поставленной целью изобретения точность стабилизации параметра 9 достигается путем соответствующего дополнительного управления работой блока 6 при уменьшении потребляемой его органами энергии.с величиной желаемой (заданной) ошибки д 9, устанавливаемой в задатчике 13, При дЧ,дЮ, на вйходе блока 10 сигнал управления отсутствует, что означает п=О, и включения нового (к-го) органа не производится. При этом одновременно с второго выхода элемента 9 на блок 11 поступает сигнал запрет, блокирующий выходной сигнал с этого блока на блок 4 формирования управляющего сигнала,Указанная работа блоков 9, 10 и б производится до полного включения в работу имеющихся органов, когда к=И. Если пои этом также не выполняется условие дЧ дЧр, то с выхода элемента сравнения 9 на блок 11 поступает сигнал,разрешающийсяработу системы по второму (иэ двух последонательных управляющих воздействий) уппавляюшему сигналу уже с блока 11. 2 ОЭтот второй управляющий сигнал формируется в блоке 11 с учетом выходного сигнала блока 10 и опорного сигнала с задатчика 12. Величина выходного сигнала блока 11 опреде - ляется уставной задатчика 12, а его знак (плюс или минус) зависит от фазы разрешаюшегоф сигнала с элемента 9,Поступая на третий вход блока 4, ЗО управляющий сигнал блока 11, пройдя через блоки 5, б вызовет разворот в горизонтальной плоскости рулевой движительной колонки, что приведет к появлению продольной составляющей упора колонки навстречу составляющей Р, Разворот колонки формируется датчиком обратной связи путем подачи на блок 4 соответствующего сигнала обратной связи и заканчивается, как только начнет вчполняться условие 40 дЧдЧ по команде с выхода элемейта сравнения 9. После этого система вновь возвоашается к оаботе по оценке условия (1), отключая последовательно с И =И - 1 органы 454управления блока б, тк, один орган а именно рулевая движительная колонка, уже участвует в создании момента стабилизации курса на своем угле разворота Р .50В случае изменения возмущения Р в сторону уменьшения (в т,ч, и до нуля с изменением знака) система возвращает органы блока б в исходное состояние (или изменяет знак создаваемых ими упоров) в последовательности, обратной вьаае укаэанной, т.е. вначале; колонка воэврашается й положение 8 к =О, а затем последовательно отключаются (включаются с другим знаком) остальные органы блока б при непрерывном контролировании выполнения условия ь Ч. д 9.Таким образом, система обеспечивает стабилизацию паоаметра с заданной точностью при одновременном уменьшении энергии, потребляемой блоком регулирующих органов б для компенсации внешнего возмущения Р.Формула изобретенияСистема регулирования, содержащая последовательно соединенные первый элемент сравнения, первый блок формирования управляющего сигнала, усилитель и блок регулирующих органов, подключенный через датчик обратной связи ко второму входу первого блока формирования управляющего сигнала, датчик и первый задатчик, выходы которых соединены соответственно с первым и вторым входами первого элемента сравнения, блок выбора регулирующего органа, выход которого соединен со вторым входом блока регулирующих органов, о т л и ч а ю щ ая с я тем, что, с целью повышения точности системы, она содержит последовательно соединенные второй задатчик и второй блок формирования управляющего сигнала и последовательно соединенные третий задатчик и втЬ- рой элемент сравнения, второй вход которого соединен с выходом первого элемента сравнения, третий вход - со вторым выходом датчика обратной связи, первый выход - со входом блока выбора регулирующего органа, а второй выход - со вторым входом второго блока формирования управляющего сигнала, третий вход которого подключен к выходу блока выбора регулирующего .органа, а выход - к третьему ,входу первого блока формирования управляющего сигнала.Источники информации,принятые во внимание нри экспертизе 1. Патент Франции Р 2110570,кл, С 05 В 1/00, Опублик19 /2. 2, Патент Великобритании Р 1342252, кл. 6 05 О 1/00, опублик,1974.732824 Составитель Л.ЦаплаговаТехред Ж,Кастелевич КорректорМ,шароши актор Н.Вирк каз 1735/ илиал ППП Патент , г.Ужгород, ул,Проектная, 4 37 Тираж 956ЦНИИПИ Государственного кпо делам изобретенийи 13035, Москва, Ж, Раушск Подписноемитета СССРоткрытийя наб., д. 4/5
СмотретьЗаявка
2555014, 12.12.1977
ПРЕДПРИЯТИЕ ПЯ Г-4372
БОЛХОВИТИНОВ ВИКТОР КОНСТАНТИНОВИЧ, КОНСТАНТИНОВ ГЕННАДИЙ ТИМОФЕЕВИЧ, НИКИТИН ВЛАДИМИР ИВАНОВИЧ, ЧЕРВЯКОВ ВИКТОР ВИКТОРОВИЧ
МПК / Метки
МПК: G05D 1/00
Метки:
Опубликовано: 05.05.1980
Код ссылки
<a href="https://patents.su/4-732824-sistema-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Система регулирования</a>
Реагирующий элемент для блоков сравнения органов релейной защиты

Номер патента: 970541
Опубликовано: 30.10.1982
Автор: Лысенко
МПК: H02H 3/38
Метки: блоков, защиты, органов, реагирующий, релейной, сравнения, элемент
...отсутствует выходной сигнал и коммутирующий5 ключ 3 закрыт. Конденсатор 8 разряжен и на вход преобразователя 10импульсов не подается сигнала.При наличии входного напряженияв тот интервал времени, когда егоположительное мгновенное значениепревышает опорное напряжение индикатора 1 уровня (Ор ), на объединенном выходе индикаторов появляется положительное напряжение заданного неизменного уровня. Конденсатор 8заряжается через резистор 5 и диод 7.Блок 4 управления не работает подвлиянием положительного напряженияна его входе и коммутируемый ключ 3остается закрыт,В тот интервал времени, когдаположительное мгновенное значениевходного напряжения ниже О , а от-;рицательное мгновенное значение входного напряжения остается ниже Оп,2,на выходе...
Способ формирования сигнала изображения и устройство для его осуществления
Номер патента: 1612956
Опубликовано: 27.09.1995
Автор: Орловский
МПК: H04N 7/18
Метки: изображения, сигнала, формирования
1. Способ формирования сигнала изображения, при котором проецируют изображение объекта на фоточувствительную поверхность передающей телевизионной трубки (ПТТ), формируют исходный сигнал изображения путем считывания потенциального рельефа на мишени ПТТ, равномерно разбивают диапазон изменений потенциала на мишени ПТТ на ряд дискретных единичных интервалов и формируют первый управляющий сигнал Uo, соответствующий единичному приращению потенциала на мишени ПТТ, измеряют приращение исходного сигнала изображения Uo и формируют первый опорный сигнал
Способ сравнения уровней составляющих двухчастотного суммарного сигнала

Номер патента: 292125
Опубликовано: 01.01.1971
Автор: Азриель
МПК: G01S 1/14
Метки: двухчастотного, сигнала, составляющих, сравнения, суммарного, уровней
...содержащий сумму двух исходных,напряжений с частотой, например 90 и 150 гц, подается на детектор 1. Селективный усилитель 2 выделяет напряжение разностной 20 частоты 60 гтрк, которое затем проходит подвум одинаковым каналам, содержащим аттенюаторы 8, 4 и фазовращатели 5, б. С выходов каналов напряжения разностной частоты поступают на детекторы 7, 8, на которые по даются также напряжения суммированныхсигналов.Спектр частот, возникающий на выходах детекторов в результате смешивания, воздействует на селективные усилители 9, 10, один из 30 которых настроен на частоту исходного напря292125 Предмет изобретения ику 50. Бб/ ы юпИ б Составитель А. Цофин актор В. С. Левитов Текред А. А. Камышникова Корректор Т. А. УманЗаказ 351719...
Устройство для формирования сигнала перегрузки газотурбинного агрегата

Номер патента: 934062
Опубликовано: 07.06.1982
Авторы: Андрезен, Бобылев, Киселев, Маклюшин
МПК: F02C 9/28
Метки: агрегата, газотурбинного, перегрузки, сигнала, формирования
...направления вращения знак фазового сдвига меняется на противоположный, с выхода блока 12 обработки сигнала направления вращения сигнал поступает на исполнительный механизм 9, а также на входы первого сумматора 5.Первый сумматор суммирует сигналы, поступившие на его вход для направления "Вперед или "Назад", с сигналом частоты вращения вала турбины с блока 4 и выдает откорректированный по направлению вращения гребного винта выходной сигнал, пропорциональный частоте вра 1 цения турбины, на вход второго сумматора 10.Итак, напряжение, пропорциональное значению температуры наружного воздуха, с соответствующим знаком поступает на вход второго сумматора 10, на другой вход которого поступает напряжение, пропорциональное частоте вращения...
Устройство для формирования цветного телевизионного изображения из монохромного сигнала

Номер патента: 692114
Опубликовано: 15.10.1979
Авторы: Главач, Елизаров, Зубарев, Квиринг, Кушнир, Самарин
МПК: H04N 9/00
Метки: изображения, монохромного, сигнала, телевизионного, формирования, цветного
...сигнала, имеющего видфиг, 2 а. Сигнал на выходе каждого анализирующего усилителя 2 (фиг, 2 б) равен нулю до того момента, пока величина входного 16сигнала не достигает уровня открывания 1(фиг. 2 а). Значения сигнала, превышающиеэтот уровень, проходят на выход усилителя2 в той же фазе до тех пор, пока величинасигнала не достигает уровня инвертирования 2. Дальнейшее возрастание величины фвходного сигнала приводит к уменьшениюсигнала на выходе анализирующего усилителя 2 до момента превышения входным сигналом уровня закрывания 3. Значения исходного сигнала, лежащие выше этого уров-ня, на выход анализирующего усилителя 2не передаются,В устройстве уровни инвертированияанализирующих усилителей 2 последовательно смещены. Один из...
Предыдущий патент: Устройство для измерения параметров динамических звеньев систем управления
Следующий патент: Регулятор расхода воздуха через пневмодвигатель
Случайный патент: 539; , 339; , 4-тринитро-5-амино-2, 239; -битиофен, проявляющий антимикробную активность