Система управления накаткой судов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
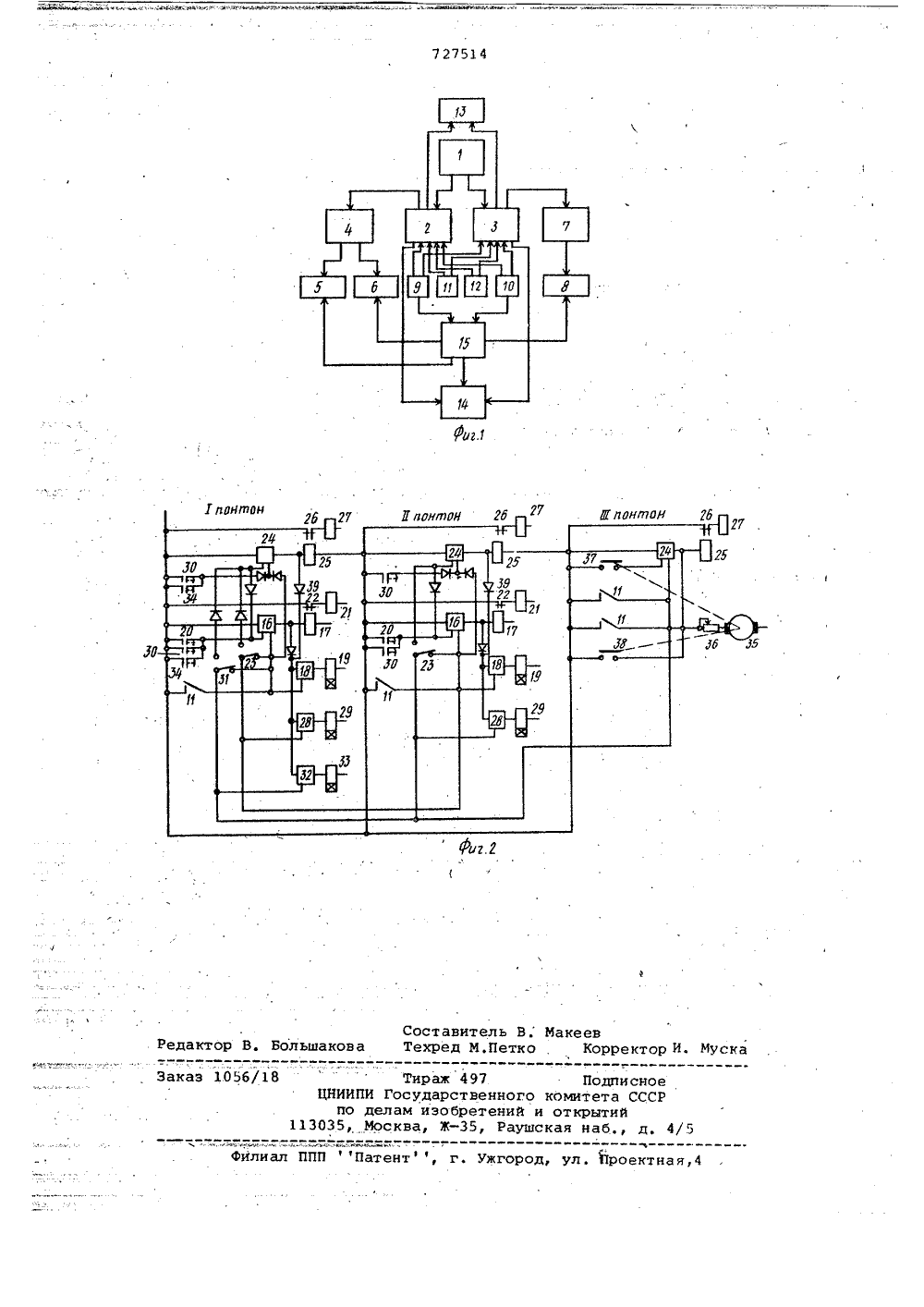
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(22) Заявлено 14.0470 (21) 1427586/27-11 с присоединением заявки Мо р 1)м. к . В 63 С 1/02 В 63 С 3/00 Государственный комитет СССР по делам изобретений и открытий(54) СИСТЕМА УПРАВЛЕНИЯ НАКАТКОЙ СУДОВ Изобретение относится к судостроению, в частно".ти к системе управления накаткой судов на спусковойдок.Известна система управления накаткой судов на спусковой док, оборудованный рядом понтонов, содержащая блок дистанционного управления,электроприводы балластных насосов,приемных и отливных клинкетов, причем насосы и клинкеты установленына каждом понтоне (1,Недостатком такой системы является ручное дистанционное управлениеприводами клинкЕтов, что можетпривести к перегрузке опор и деформациидока, или снятию дока с мористой опоры и к аварииЦелью изобретения является обеспечение автоматизации балластировкидока при накатке судна наспусковойдок;Для этого система снабжена переключателями, датчиками положения,автоматическими выключателями балластного насоса, включенными в цепьпитания насоса, и реле времени, причем датчики положения соединены содним входом автоматического выключателя балластного насоса, а в цепьдругого входа автоматического выклю-.чателя подключены замыкающие контакты реле времени, при этом датчикположения каждого предыдущего понтона подключен к входу автоматического выключателя балластного насосапоследующего понтона посредствомпереключателя и кблоку дистанционного управления.Кроме того, система снабженадифферентометром, включенным в цепьэлектропривода балластного насосапоследнего из ряда понтонов, и программным механизмом, включенным параллельно электроприводу балластного насоса.Дополнительно датчик положениякаждого предыдущего понтона подключен в цепь электропривода приемногоклинкета каждого последующего понтона.На фиг.1 изображена блок-схемасистемы управления; на фиг.2 - принципиальная схема системы управления.Система управления накаткой состоит из блока дистанционного управления 1, связанного с блоком 2 накатки на док и блоком 3 накатки на ста65 пельное место. К блоку 2 подключены блок 4 выбора отливного клинкета и балластного насоса. К блоку 4 подсоединены отливные клинкеты 5 и балластные насосы 6 с электроприводами, а к блоку 3 накатки на стапельное место подключен блок 7 выбора приемного клинкета, связанный с приемными клинкетами 8.Необходимая информация о состоянии системы док-судно обеспечивается датчиками , "прогибомером 9, дифферентометром 10, датчиком положения 11 (для определения положения накатываемого судна по длине), датчиком 12 уровня акватории. Все эти датчики подключены к блоку 2 накатки надок 15 и блоку 3 накатки на стапельное место, Блоки 2 и 3 связаны также с отсечными клинкетами 13 и с пультом управления 14 судовозных тележек, Для аварийной защиты системы служит 20 блок аварийной защиты 15, Датчики положения 11 установлены на стапельпалубе дока вдоль рельсовой эстакады и число их различно в зависимости ,от числа понтонов (для данного.случая взято три понтона) или балластных отсеков. Датчик положения 11 связан, с автоматическими выключателями 16, которые при замыкании контактов датчика положения 11 включают реле 17 балластного насоса, Выключатель 18 подключен к выходу соответствующих выключателей 16, замыкающихся на реле времени 19, служащего для контроля работы балластного насоса при его первом включении. Замыкающие 35 контакты 20 реле 19 включены в цепь входа выключателя 16, В цепь реле 21 закрытия отливного клинкета включены размыкающие контакты 22 соответствующих реле 17. 40Переключатель 23 подключен к схеме первогО понтона и к датчику положения следующего понтона, таким же образом этот переключатель в следующем понтоне подключен к датчику положе ния третьего понтона. В зависимости от весовой характеристики накатываемого,судна переключатель 23 может быть подключен к входу выключателя 24, включающего реле 25 открытия приемного клинкета, либо на вход выключателя 16, включающего реле 17 балластного насоса. Размыкающие контакты 26 реле 25 включены и цепь реле 27 закрытия приемного клинкета.Автоматические выключатели 28 под ключены к реле времени 29. К входу выключателя 28 н схеме первого понтона подключен датчик положения второго понтона, а к соответствующему выключателю в схеме второго понтона - щ датчик положения третьего понтона, Замыкающие контакты 30 реле времени 29 включены в цепи входа выключателя 24 и выключателя 16. Переключатель 31, подключенный к датчику положения третьего понтона, может бытьзамкнут либо на вход выключателя 24,либо выключателя 16Автоматический выключатель 32,подключенный к реле времени 33, связан своим входом с датчиком положения третьего понтона, Замыкающиеконтакты 34 реле времени 33 включеныв цепь входа выключателя 24 и выключателя 16.Дифферентометр 1 0 своими замыкающими контактами (не указаны на схеме)включен непосредственно н цепь релебалластного насоса третьего понтона.Двигатель 35 программного механизмавключен параллельно реле балластногонасоса третьего.понтона. В цепи якоря двигателя 35 имеется регулировочное сопротивление 36, с помощьюкоторого устанавливается необходимаяскорость вращения двигателя, котораяопределяется н соответствии с необходимой продолжительностью работыбалластного насоса третьего понтона.Программный механизм имеет такжедна микровыключателя 37, 38, которыезамыкаются одновременно по истечениювремени, необходимого для работы насоса, или сразу после возвращенияпрограммного механизма н исходноеположение. Микровыключатель 37 включен в цепь входа выключателя 16третьего понтона. Микроныключатель 38находится в цепи независимого питаниядвигателя 35 программного механизма.В схеме диоды 39 служат для развязкиотдельных частей схемы,Все автоматические выключателиимеют единичный вход для включениявыключателя и нулевой для выключениявыключателя,При накатывании судна на перныйпонтон замыкается датчик положения11 первого понтона, что приводит кзамыканию цепей единичных входовавтоматического выключателя 16, включающего реле 17 балластного насоса би выключателя 18, включающего основное реле времени 19, Реле 17 включаетн работу балластный насос с одновременным включением электропринодаотливного клинкета на открытие. Релевремени 19 по истечении времени,необходимого для работы насоса, чтобы скомпенсировать вес накатынаемогосудна, приходящийся на первый понтон,замыкает свои контакты в цепи нулевого входа автоматического выключателя 16. В результате этого реле 17обесточивается, насос остананлинается,Нормально замкнутые контакты 22 реле17 включат реле 21 закрытия отливногоклинкета. Одновременно обесточитсяреле времени 19,При накатывании судна на второйпонтон замыкается датчик положения 11второго понтона. Работа схемы второго понтона при этом будет аналогичнавышеописанной, Одновременно с датчика положения 11 второго понтона сигнал придет на перекпючатель 23 схемыпервого понтона и на единичный входвыключателя 28, Если переключатель23 замкнут на единичный вход выключателя 16, то включаются в работу 5реле 17 балластного насоса и релевремени 27. Если переключатель 23замкнут на единичный вход выключатетеля 24, включаются в работу реле25 открытия приемного клинкета и ре 10ле времени 27, Нормально разомкнутыеконтакты реле времени 27 находятсяв цепях нулевого выключателя 24 ивыключателя 16, поэтому по истеченииопределенного промежутка времени реле25 обесточится (если оно было поднапряжением), а его нормально замкнутые контакты 26 включат реле 27закрытия приемного клинкета, илибудет обесточено реле 17 балластногонасоса. 20По мере продвижения накатываемогообъекта на доке будет появляться дифферент (при установке дока на однубереговую опору), При появлении дифферента замыкаются контакты дифферентометра 10, и реле третьего пон-тона, получив питание, включит свойбалластный насос. Одновременно сэтим насосом будет включен двигатель35 программного механизма, которыйбудет поворачивать свои микровыключатели 37 и 38 в сторону замыкателя.После ликвидации дифферента контакты дифферентометра разомкнутся,реле 17 обесточится - балластный на 35сос третьего понтона будет остановлени одновременно остановится двигатель35 программного механизма.При накатывании судна на третий(последний) понто: замыкается датчикположений 11 третьего понтона. 40Работа схем второго и первого понтонов аналогична вышеописанной.В схеме третьего понтона включитсяв работу балластный насос одновременно с двигателем программного механизма, который будет дальше поворачиватьмикровыключатели 37 и 38 в сторону ихзамыкания. По истечении времени,необходимого для полной компенсациивеса судна, приходящегося на третий 50понтон, микровыключатели 37 и 38замкнутся. Цепь нулевого входа выключателя 16 будет замкнута, и он выключится, обесточив реле 17 балластного насоса третьего понтона. Однако.двигатель 35 будет продолжать работать, так как микровыключатель 38образовал для него независимую цепьпитания, По возвращении программного механизма в исходное состояние микровыключатель 38 разомкнетс я, и двигатель 35 остановится,Данная система управления упрощает работу дькмейстера, обеспечивает полную компенсацию веса накатываемого объекта за счет связи междусобой цепей балластных насосов идатчиков положения соседних понтонов,Формула изобретения1, Система управления накаткой судов на спусковой док, оборудованныйрядом понтонов, содержащая блок дистанционного управления, электроприводы балластных насосов, приемных иотливных клинкетов, причем насосыи клинкеты установлены на каждомпонтоне,о т л и ч а ю щ а я с я тем,что, с целью обеспечения автоматизации балластировки дока при накаткесудна на сйусковой док, система снабжена переключателями, датчиками положения, автоматическими выключателями балластного насоса, подключеннымив цепь питания насоса, и реле времени, причем датчики положения соединены с одним входом автоматическоговыключателя балластного насоса, а вцепь другого входа автоматическоговыключателя подключены замыкающиеконтакты реле времени, при этом датчик положения каждого предыдущего понтона подключен к входу автоматического выключателя балластного насосапоследующего понтона посредствомпереключателя и к блоку дистанционного управления.2, Система управления по п.1,отли чающая с я тем, чтоона снабжена днфферентометром, включенным в це электропривода автоматического балластного насоса последнего из ряда понтонов, и программным механизмом, включенным параллельно электроприводу балластногонасоса.3. Система управления по п.1,о т л и ч а ю щ а я с я тем, чтодатчик положения каждого предыдущего понтона подключен в цепь электропривода приемного клинкета последующего понтона.Источники информации,принятые во внимание при экспертизе1. Вахарловский Г.А. и др, Современные;доковые сооружения длякрупных и средних судов.ЛСудостроение, 1968, с. 146,727514 г оставитель В; Макеевехред М.Петко . Коррек Редактор В льшаков Иуск Заказ 1056/1 Тираж 497 Подписное ЦНИИПИ Государственного комитета СССР по делам изобретений и открытий 3035, Москва, Ж, Раушская наб , д, 4/5илиал ППП Патент , г. Ужгород, ул. Мроектна
СмотретьЗаявка
1427586, 14.04.1970
ПРЕДПРИЯТИЕ ПЯ А-1277
АРАНОВ ЛЕОНИД АНАТОЛЬЕВИЧ, ЧЕСНОКОВ ВЛАДИМИР НИКОЛАЕВИЧ, МЯГКОВ ЕВГЕНИЙ НИКОЛАЕВИЧ, МАРИЕВСКИЙ ВЛАДИМИР ПАВЛОВИЧ, БАРАК ИОСИФ АБРАМОВИЧ, ПЕТРАКОВ ЛЕВ АЛЕКСЕЕВИЧ, ОЗЕРОВ ЮРИЙ ДМИТРИЕВИЧ
МПК / Метки
МПК: B63C 1/02
Опубликовано: 15.04.1980
Код ссылки
<a href="https://patents.su/4-727514-sistema-upravleniya-nakatkojj-sudov.html" target="_blank" rel="follow" title="База патентов СССР">Система управления накаткой судов</a>
Устройство для резервирования приотказе выключателей для шин, соеди-ненных по cxeme “шины-автотрансфор-matop”, и линейного присоединенияс выключателями, снабженными блокамизащиты c выходными реле защиты отмежду

Номер патента: 817852
Опубликовано: 30.03.1981
МПК: H02H 11/00
Метки: cxeme, блокамизащиты, выключателей, выключателями, выходными, защиты, линейного, отмежду, приотказе, присоединенияс, резервирования, реле, снабженными, соеди-ненных, шин, шины-автотрансфор-matop
...выключателе, реле 17 времени отстройки и его контакт 18, сигнальное реле 19, выходное промежуточное реле 20 и его кон. такты 2 - 24, блок-контакты 25 в 30 разъединителей 2 и 3, блок-контакты 31 - 33 отказавшего выключателя 1, реле 34 времени возврата и его контакты 35 и 36, выходное 4реле 37 возврата и его контакты 38 - 42 и резистор 43. Возможно вклю 1 ение кон. такта 44 реле 37.Обмотки выходного реле и реле офазного контроля тока на схемах не показаны.Устройство работает следующим образом.Г 1 ри срабатывании выходного реле с выявлением отказавшего выключателяс прилегающими к нему разъединителями 2 и 3 подается команда на отключение отказавшего и примыкающих к нему выключателей, а также замыкающим контактом 4 - на срабатывание двух...
Реле минимального напряжения с выдержкой времени для защиты электроустановок

Номер патента: 119222
Опубликовано: 01.01.1959
Автор: Аронов
МПК: H01H 83/12
Метки: времени, выдержкой, защиты, минимального, реле, электроустановок
...работы реле,На чертеже изображена схема предлагаемого реле.Реле содержит электромагнитный элемент 1 минимального напряжения, анкерный механизм 2 выдержки времени с контактной системой 3, механизм 4 свободного расцепления и иловой электромагнит б.При срабатывании элемента 1 минимального напряжения освобождается защелка б механизма выдержки времени, который позволяет механизму 4 свободного расцепления отключить выключатель, При восстановлении напряжения силовой электромагнит б возвращает реле в исходное положение. Все устройство питается от трансформатора напряжения защищаемой электроустановки и встроено в привод выключателя. Предмет изобретени Реле минимального напряжения с выдержкой времени для защиты элеткроустановок, содержащее...
Устройство для резервирования при отказе выключателей для шин, соединенных по схеме “шины-автотрансформатор” и линейного присоединения с выключателями, снабженными блоками защиты с выходными реле защиты от межд

Номер патента: 655017
Опубликовано: 30.03.1979
Автор: Эскин
МПК: H02H 11/00
Метки: блоками, выключателей, выключателями, выходными, защиты, линейного, межд, отказе, присоединения, резервирования, реле, снабженными, соединенных, схеме, шин, шины-автотрансформатор
...с подачей импульса на отключение 25 одной или трех фаз всех выключателей присоединения 1 от релейной защиты подается повторный импульс на отключение тех же выключателей, чем осуществляется контрольная проверка их исправности. 30При отключении поврежденной фазы или всех фаз поврежденной линии контактами 13 - 15 и 7 соответствующих токовых реле 16 - 18, а также контактами выходных реле защиты 3 - 6 размыкаются цепи питания реле 10 - 12 и они возвращаются в исходное положение.В случае неисправности в оперативных цепях защиты и отказе в отключении одной или трех фаз одного из выключателей при соединения, например выключателя 23, повторным импульсом от контактов 20 - 22 отключается отказавшая фаза или три фазы выключателя в...
Реле тока с зависимой характеристикой времени действия

Номер патента: 866634
Опубликовано: 23.09.1981
Авторы: Кузьмин, Паперно, Сурвило
МПК: H02H 3/08
Метки: времени, действия, зависимой, реле, характеристикой
...на входпускового блока 3, первый вход блока4 сравнения и на подвижный контактдвухпозиционного переключателя 17.Пусковой блок 3 выполнен в виденуль-индикатора, выходной сигнал которого меняется дискретно при изменении знака выходного напряжения. Вслучае превышения входным током токасрабатывания, реле пусковой блок 3срабатываеч. и воздействует на второй управляемый электронный ключ 8,который дешунтирует в резисторноконденсаторном интегрирующем блоке 9конденсатор 11 и разрешает зарядконденсатора 11 через резистор 10.Блок 4 сравнения сравнивает напряжение О с выхода генератора треугольного напряжения 5 с напряжением Она выходе решающего усилителя 2 и,имеет два дискретных значения выход"ного сигнала: одно при ООидругое при ОХ ( О уКак...
Электрический выключатель с выдержкой времени

Номер патента: 1370
Опубликовано: 15.09.1924
Авторы: Аничков, Бекаури, Миткевич
МПК: H01H 43/26, H01H 7/02
Метки: времени, выдержкой, выключатель, электрический
...контакты расположе зи неподвижных 8 м они могут соответственн и замыкать цепь.Контакты 7 - 8 и соединенные с ними параллельно контакты 9 в 10 могут вводиться в размыкаемую прибором цепь или непосредственно, или как показано на чертеже через посредство коммутатора 11, устроенного, например, на подобие обыкновенного выключателя. Назначение этого добавочного устройства заключается в том, чтобы замыкание цепи происходило лишь при вертикальном положении песочных часов",Прибор действует следующим образом, Песок или иное сыпучее тело, пересыпаясь из верхней половины песочных часов в нижнюю, наполняет воронку 3. При этом контакт 7 прижимается к контакту 8 и замыкает цепь.Когда пересыпание оканчивается, то под действием пружины 5 воронка 3,...
Предыдущий патент: Судно для сбора нефти с поверхности воды
Следующий патент: Сухой док для строительства судов
Случайный патент: Способ получения двуокиси кремния