Устройство для управления адаптивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
Союз СоаетсникСоциалистическихРеслублин ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОИ:КОМУ СВН ЕТИЛЬСЯУ(22) Заявлено 2 52892 4/18-2 4Ио -инением заявки с пр осударственный комятет СССР оо делам изобретеннй н открытий(23) Приоритет. - Олубликоеано 251 9 Бюллетень Ио 4 описанил 251279 та оп л йн, В и С.М М. Ком Гурев О.Х,вторы иобретения аро лады ИтЕЛЬ Рыбинский авиационный технологический институт ОЧСТВО ДЛЯ УПРАВЛЕНИ РОБОТОМ(54) ИВНЫ 2 5 Изобретение относится к оробототехники и может быть изовано лля управления адаптироботом при автоматизации прственных процессов,Изнестны устройства для управле"ния адаптивными роботами, Устройст-.во (1), содержащее информационнуюповерхность в виде системы чувствительных элементов, на которую устанавливают объект манипулирования,щуп на схвате и экран, обладает темнедостатком, что имеет значительнуюсложность и громоздкость, что затрудняет применение его в производственных условияхНаиболее близким техническимреыением к данному изобретению является устройство 2,1, содержащеепоследовательно соединенные блок ввода иэображения, установленный насхвате робота, операционный блок,коммутатор команд, блок памяти, блокформирования сигналов перемещения,приводы и блок датчиков положенияисполнительного органа робота, выход которых подключен ко второмувходу блока формирования сигналовперемещения, а второй выход блока памяти соединен со входом нуль-органа.Недостатком этого устройства янляется невозможность определения угла ориентации детали на рабочей поверхности, что приводит к необходимости применения для взятия деталивакуумных или электромагнитных схватов, позволяющих захватывать детальлишь на основании информации о центре тяжести детали. Однако, при помощи этих схватов нельзя захватитьдетали со сложной поверхностью (припомощи вакуумных схватов) и детали,изготовленные из немагнитных материалов (при помощи электромагнитныхсхнатон),Целью изобретения является расыирение функциональных возможностейустройства,Сущность изобретения заключаетсяв том, что устройство содержит блоккругоной разнертки и последовательно соединенные блок управления, блокформирования прямоугольного растраи коммутатор разверток, выход которого подключен ко входу блока вводаизображения, а второй вход - к первому выходу блока круговой разнертгки, второй выход которого соединенсо вторым нходомоперационного блока, второй выход которого подключенк первому входу блока управления,второй вход которого соединен совторым выходом блока формированиясигналов перемещения, третий вход" с выходом нуль-органа, второй выходс третьим входом блока формированиясигналов перемещения, третий выходсо вторым входом коммутатора команд,четвертый выход - с третьим входом операционного блока, пятый выход - свходом блока круговой ра. нертки,шестой выход - с третьим входом коммутатора раэверток.На чертеже представлена блок-схе 15ма устройства, устройство содержитблок 1 ввода изображения, операционный блок 2, коммутатор 3 комайд," 6 лок4 памяти, блок 5 формирования сигналов перемещения, приводы б исполнительного органа робота, блок 7 датчиков положения исполнительного оргайа робота, нуль-орган 8, блок 9 кру-говой развертки, блок 10 управлбния,блок 11 формирования прямоугольного 25растра, коммутатор 12 раэнерток,Устройство работает следующим"образом. Положение детали на рабочейповерхности определяется координа-"тами ее центра тяжести Х и углом 30ориентации оси симметрии детали относ 1 тельно некоторой линии отсчета.Вычисление координат положения детали на робочей поверхности начинаетсяс момента поступления импульса передачи управления из блока 5 формирования сигналов Перемещения в блок 10управления. Вычисление интересующихпараметров осуществляется путем обработки иэображения контролируемой 4 Одетали, сформированного блоком 1ввода изображения, Чувствительнымэлементом блока 1 ввода изображенияявляется Фотоприемная матрица, наматричное Фоточувствительное полекоторой проецируется с помощью объектива иэображение детали, С началомработы устройства блок 10 управлениязапускает блок 11 Формирования прямоугольного растра. Выходные сигналыблока 11 поступают на вход коммутатора 12 разнерток, Под действием сигнало 6, поступающих из блока 10 управлений- на"входы коммутатора 12 развер--тбк, выходнйе сигналы блока 11 Формирования прямоугольного растра через 55коммутатор 12 развертокподаютсянавход"блока 1 ввода изображения, НаЬсйовайии логических зйаченййсйгна-"="лоб" "поступающих- свыхода блока 1ввода изображения и с ныхода блока 6011 формирования прямоугольного растра,операционный блок 2 вычисляетзначение координат центра тяжестидетали, После окончания вычисления- коордийаты Х с выхода операционйого,65с блока 2 на вход блока 10 управ энияпоступает сигнал, свидетельствующийоб этом, и блок 10 управления черезкоммутатор 3 команд обеспечиваетзапись информации о координате Х совыхода операционного блока 2 в соответствующую ячейку блока 4 памя д,После этого блок 10 упранления переключает коммутатор 3 команд и коммуматор 12 раэверток н режим определения. Вычисление и запись информациив блок 4 памяти осуществляется аналогично Х. После нычисления координат центра тяжести блок 10 упранлениявыдает в блок 5 Формирования сигналов перемещения команду на отработкуполученной информации, В процессе отГ ьботки этой информации приводами бисполнительного органа робота схватробота с установленным на нем блоком1 ввода изображения перемещается впозицию, находящуюся над центром тяжести детали. В момент окончанияотработки информации о центре тяжести, что фиксируется по совпадениюинформации, заданной на отработку, иинформации, полученной с датчиков7 положения исполнительного органаробота, из блока 5 формирования сигналон перемещения н блок 10 управления поступает импульс конца отработки,По этому сигналу блок 10 управления снова ныдает команду на вычисление координат центра тяжести детали, Что необходимо для контроля совершенного движения и повышения помехоустойчиности устройства адаптивного управления. При слределении в последующем цикле вычислений нулевйх значений координат центра тяжести детали срабатывает . нуль"орган 8, Под дейстнием сигнала с выхода нуль-органа 8 блок 10 управления включит режим определения угла ориентации детали. В режиме определения угла ориентации блок 10 управления запускает блок 9 круговой развертки. Выходные сигналы блока 9 круговой развертки поступают на входы коммутатора 12 разнерток. Управляющие сигналы, поступающие из блока 10 управления в режиме опре-деления угла ориентации детали на вход коммутатора 12 разверток, обеспечивают прохождение сигналов с выхода блока 9 круговой развертки на выход коммутатора 12 разверток. Это обеспечивает формирование дискретной круговой развертки вокруг центра тяжести детали. Одновременно на другом выходе блока 9 круговой развертки вырабатываются значения угловых расстояний, разделяющих две соседние точки дискретной круговой развертки. На основании логических значений СийаМов с выхода блока 1авода изображения, значений угловых расстояний с выхода блока 9 круговой развертки и управляющих сигналов с выхода блока 10 управления операционный блок 2 вычисляет значение угла орие нтации детали, Поб ле окончания вычислений угла ориентации его значение с выхода операционного блока 2 с помощью коммутатора 3 команд по сигналу иэ блока 10 управления записывается в апре деленную ячейку блока 4 памяти. Затем блок 10 управления выдает в блок 5 формирования сигналов перемещения команду на отработку полученной информации. После разворота схвата 15 робота на величину угла ориентации детали на вход блока 10 управления поступает импульс конца отработки иэ блока 5 формирования сигналов перемещения, по которому повторяется цикл вычислений угла ориентации. При получении нулевого значения угла ориентации срабатывает нуль-орган 8 и устройство 10 управления выдает в блок 5 Формирования сигналов перемещения команду на взятие детали. Установка блока 1 ввода изображения на схвате робота позволяет повысить точность измерения параметров положения и ориентации малых деталей. Это достигается изменением размеров эоны обзора соответственно с раэме- рами детали эа счет изменения высоты расположения блока 1 ввода изображу ния над рабочей поверхностью при формировании иэображения детали. 35Применение изобретения позволит отказаться от необходимости разработки и изготовления дорогостоящих подающих и ориентирующих приспособ-40 лений, исключит необходимость доработки технологического оборудования при внедрении промышленных роботов в производство, а также обеспечит бе зопасную эксплуатацию промышленного 45 робота, исключив его соударение с деталями и оборудованием. Формула изобретения Устройство для управления адаптив-ным роботом, содержащее последовательно соединенные блок ввода иэображения, установленный на схвате исполнительного органа робота, операционный блок, коммутатор команд, блокпамяти, блок формирования сигналовперемещения, приводы и блок датчиковположения исполнительного органа робота, выход которого подключен ковторому входу блока Формирования сигналов перемещения, второй выход блока памяти соединен со входом нульоргана, о т л и ч а ю щ е е с я тем,что с целью расширения Функциональных воэможностей устройства оно содер"жит блок круговой развертки и последовательно соединенные блок управления, блок формирования прямоугольного растра икоммутатор раэвертак,выход которого подключен ко входублока ввода изображения, а второйвход - к первому выходу блока круговой развертки, второй выход которо-го соединен со вторым входом операционного блока, второй выход которого подключен к первому входублока управления, второй вход которого соединен со вторым выходом блока формирования сигналов перемещения, третий вход - с выходом нульоргана, второй выход - с третьимвходом блока формирования сигналовперемещения, третий выход - со вто, рым входом коммутатора команд, четвертый выход - с третьим входом операционного блока, пятый выход в .совходом блока круговой развертки, ашестой выход - с третьимвходам коммутатора раэверток.ИсточнИки информации,принятые ва внимание при экспертизе1. Авторское свидетельство СССРР 474435, кл. В 25 д 9/00, 12,04,73,2. Авторское свидетельство СССРР 470491, кл. В 25,3 3/00, 2 б,03.74704775 Составитель Е хред Л, Алфер олитов Корректор И. Михеева дактор Д е Вака илиал П 11 Л Латент, г. Укгород, ул. Проектная 931/19 7 ираз 10 ЦНИИПИ Государственно51, о комитй и откскан на одписноа СССРтий
СмотретьЗаявка
2528924, 26.09.1977
РЫБИНСКИЙ АВИАЦИОННЫЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ
ГЛАДШТЕЙН МИХАИЛ АРКАДЬЕВИЧ, КОМАРОВ ВАЛЕРИЙ МИХАЙЛОВИЧ, САХАРОВ ОЛЕГ ТИМОФЕЕВИЧ, ГУРЕВИЧ СЕРГО МАТВЕЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: адаптивным, роботом
Опубликовано: 25.12.1979
Код ссылки
<a href="https://patents.su/4-704775-ustrojjstvo-dlya-upravleniya-adaptivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивным роботом</a>
Устройство для ввода сигналов управления из цвм
Номер патента: 636602
Опубликовано: 05.12.1978
Авторы: Барановский, Друз, Савин
МПК: G06F 3/04
...очередности вывода каждого очередного сигнала управления. При выдаче одного первого сигнала управления соответст вующий код поступает на входы дешифратора 7, который формирует сигнал, свидетельствующий о выдаче первого по очередности сигнала управления, Этот сигнал подается на регистр 8, 55 где фиксируется первый номер очередности, и поступает на элемент 9. При равнозначности сигналов на обоих входах элемента 9 сигнал неисправности на его выходе не формируется. При этом отсутствует соответствующий сигнал на выходе блока 13, который обеспечивает прохождение сигналов только 85 02по окончании переходных процессов в устройстве. При отсутствии сигналов неисправностей блок 14 формирует сигнал разрешения, который подается на выходи устройства,...
Устройство для формирования и передачи дискретных сигналов
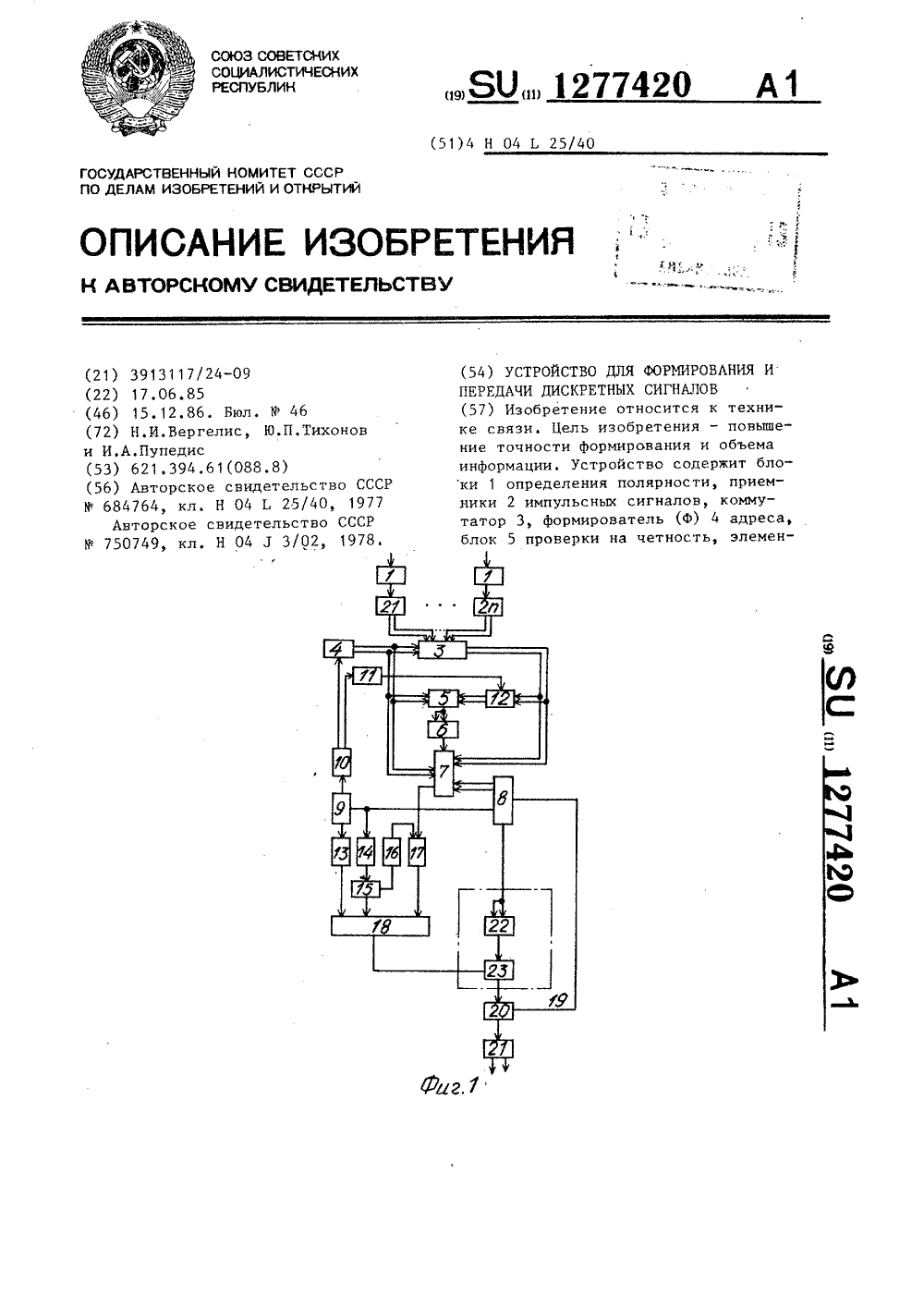
Номер патента: 1277420
Опубликовано: 15.12.1986
Авторы: Вергелис, Пупедис, Тихонов
МПК: H04L 25/40
Метки: дискретных, передачи, сигналов, формирования
...н каждом из четырех приемников).6-9 разряды - информация о состоянии одного канала, закодированная вниде6 7 8 9 0 0 1 1 1 1 , - незадействие, 0 1 О 1 - норма канала, 1 0 0 1 - авария канала;10 разряд -четность передаваемой информации: логическая "1" - информация четная, логический "0" - нечетная, 11 и 12 разряды - стоповые импульсы (всегда логическая "1"), т.е. каждый блок данных о состоянии канала содержит импульсную последовательность двоичных элементов, например, такого вида: 000100101111, которая означает, что первый канал третьего приемника находится в норме. Образованный таким образом двенадцатиразрядный блок данных в параллельном коде записывается в ре" гистр 7 сдвига и под воздействием тактовых импульсов, поступающих от блока 8...
Способ измерения временного положения переодической последовательности радиоимпульсов и устройство для его осуществления

Номер патента: 673944
Опубликовано: 15.07.1979
Авторы: Балов, Горностаев, Никитенко, Химулин, Чистов
МПК: G01S 5/14
Метки: временного, переодической, положения, последовательности, радиоимпульсов
...4 подаются как на фазоизмерительную следящую систему 5 через безынерционный линейный сумматор 12, так и на измеритель 8 интервала Ь 1, состоящий в данном случае из двух предельных ограничителей 9 и 13, вычитаю- щего блока 14, временного ди-криминатора 10 и накопителя 11.На выходе временного дискриминатора 10 будут выделяться прямоугольные видео- импульсы с длительностью, равной интервалу Ь при в = 0;1, +1 и равной длительности строба при 1 гп 11. При формировании двух последовательностей дополнительных радиоимпульсов пороговыи анализатор 45 5 О 55 5рую фазоизмерительную следящую систему15, причем приемник 1 может содержать триполюсовых фильтра 16, 17, 18., Устройство работает следующим образом,Выбранные точки однонаправленной смены...
Блок защиты клавиатуры для устройств ввода информации

Номер патента: 1096632
Опубликовано: 07.06.1984
Автор: Кутаев
МПК: G06F 3/02
Метки: блок, ввода, защиты, информации, клавиатуры, устройств
...структурная схема устройства для ввода информации на базе предлагаемого блока.Устройство содержит первый вто - рой третий и четвертый инвертсры 1-4,элемент сравнения 5, первый и второйэлементы И-НЕ 6 и 7, первый триггер8, информационный вход 9 блока, эле -мент 3 И-ИЛИ-НЕ 10, делитель 11 частоты, второй, третий, четвертый и пятый триггеры 12 - 15, вход 16 синхронизации блока, первьй второй и третий управляющие входы 17 - 19 блока,первый и второй выходы 20 и 21 блока, первый и второй входы 22 и 23 10сравнения блока, блок 24 защиты клавиатуры, коммутатор 25, регистр 26,счетчик 27, генератор 28 импульсов,формироватсль .29 импульсов, формирователь 30 сигналов клавиатуры, клавиатуру 31.Формирователь 30 сигналов клавиатуры включает датчики (не...
Фотоэлектрический блок к устройству для измерения перемещений

Номер патента: 763680
Опубликовано: 15.09.1980
Авторы: Александров, Бондарев, Боримский, Горбань, Платонов, Шкуропадский
МПК: G01B 21/00
Метки: блок, перемещений, устройству, фотоэлектрический
...блока к устройствУдля измерения тн:ремещений.Блок содержит фотоэлектрические преобразователи, выполненные в виде фазосдвигаю10 Формула изобретения акаэ 6267134Подписное ИИПИраж 80 Филиал ППП "Патент", жгород, ул. Проектн 3 76368ших лементов 1, 2, состоящих иэ двух сим.меричных многозвенных структур, включенных по балансной схеме и образованных иээлементарных цепочек, включающих фотоем.кости или фоторезисторы 3, 4, высокочастот 5ный генератор 5, источник 6 постоянного напряжения, фазометр 7, соединенный входамис выходами фотоэлектрических преобразователей,и резисторы 8 и 9,На чертеже так же условно изображеныосветитель 10, отражатель 11, соединяемыйс контролируемым объектом, и призма 12оптической системы устройства.Фотоэлектрический...
Предыдущий патент: Устройство для управления адаптивным роботом
Следующий патент: Устройство для программного управления перемещением рабочего органа
Случайный патент: Устройство для изготовления пеностекла