Андроид
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 67162
Автор: Штернфельд
Текст
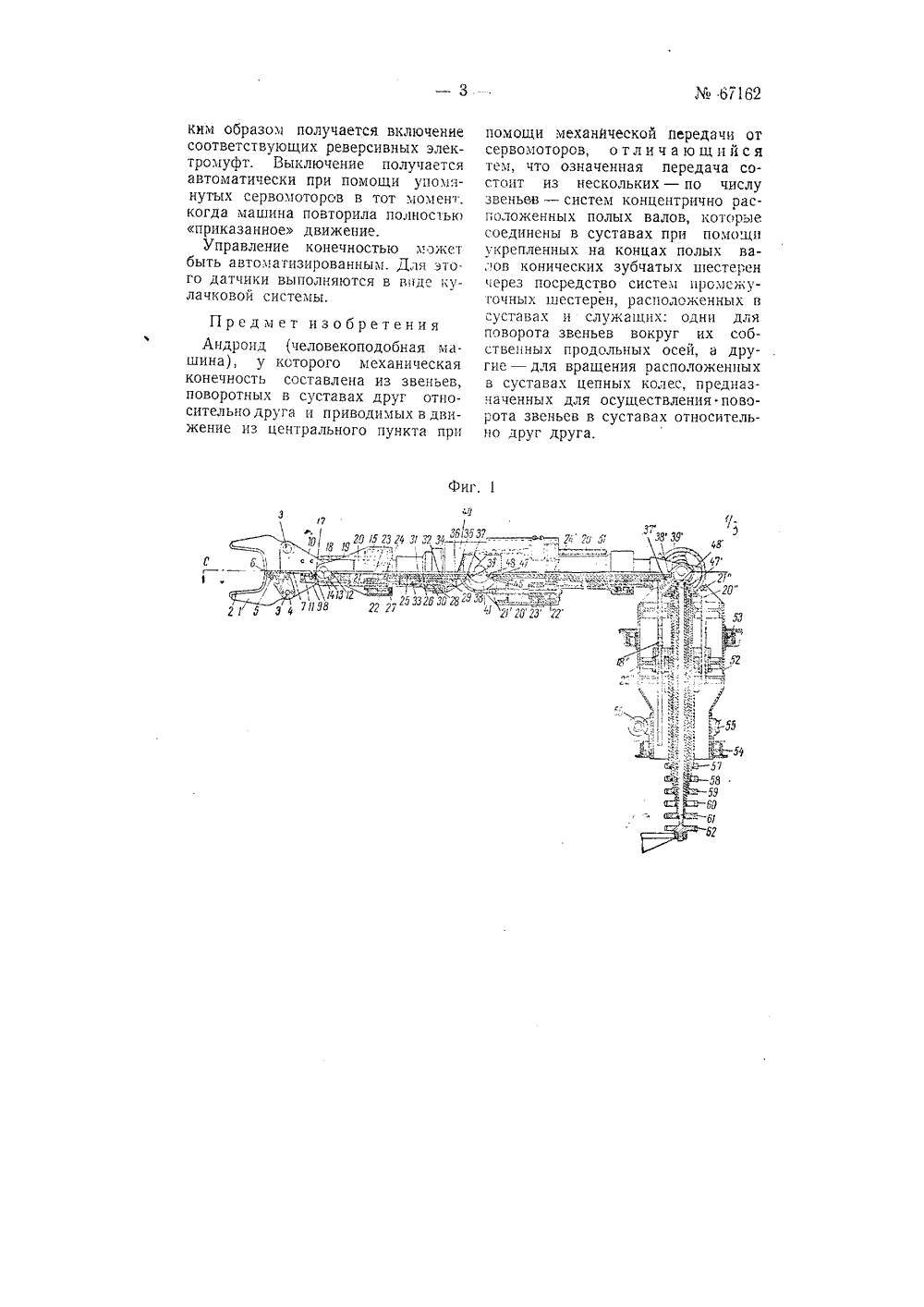
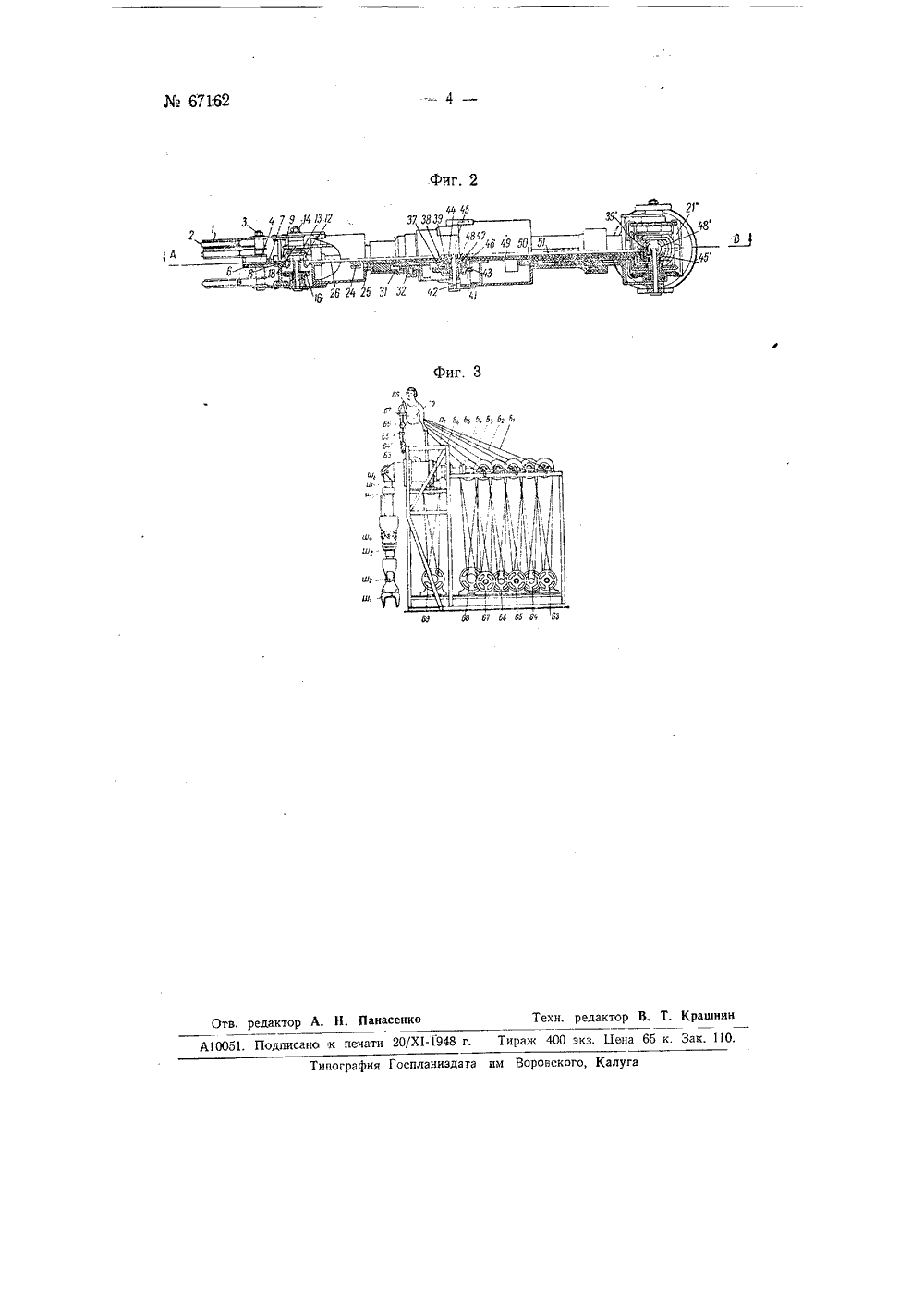
Ж 67162 Класс 471 т, 22 СССР,САНИ Е ИЗОБРЕТЕК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ арегистрировано в Бюро изобретений Госпдана ССС Я. ШтернфелАНДРОИД сентября 1938 года в Наркогиэлектропроги за .6 187 о 4инениеги заявки от 3 сентября 938 года за ЛЪ 18708 (30108 Опубликовано 30 сентября 1948 года ЗаявленоУже известны андроиды (человекоподобные машины), у которых механические конечности составле. ны из звеньев, поворотных в суствах относительно друг друга и приводимых в движение из центрального пункта при помощи механической передачи от сервомоторов,Предлагаемый андроид, звенья которого обладают значительным количеством степеней свободы, имеет ту особенность, что передача состоит из нескольких (по числу звеньев) систем концентрично расположенных полых валов, которые соединены в суставах при помощи укрепленных на концах полых валов конических зубчатых шестерен посредством систем промежуточных шестерен, расположенных в суставах и служащих: одни - для поворота звеньев вокруг их собственных продольных осей, а другие - для вращения расположенных в суставах цепных колес, предназначенных для осуществления поворота звеньев а суставах относительно друг друга.Фиг. 1 изображает разрез правой руки андроида по линии АВ фиг. 2; фиг. 2 - разрез по линии СД фиг. 1; фиг. 3 - общий вид примерной формы использования руки андроида,Пальцы руки андроида выполнены в виде щипцов. Рабочие части, т. е. клешни 1 щипцов, покрыты резиной 2 и вращаются вокруг осей 3, при повороте зубчатых секторов 4,Эти секторы сцепляются с двойной рейкой 5, не имеющей свободы вращения. Рейка имеет внутреннюю нарезку 6 по центральной оси, в которую ввинчивается винт 7, имеющий на другом конце коническую шестеренку 8 со втулкой 9,Благодаря радиально упорному подшипнику, прикрепленному к плите 10, и кольцевому выступу 11 винта 7, этот последний может лишь вращаться относительно плиты 10.Вращательное движение шестеренки 12 передается шестеренке 8 посредством шестерни 13, посаженной на ось 14,Плита 10 вместе со щипцами может вращаться относительно цилиндра 15 вокруг оси 14. Для получения этого движения, к цепному колесу 16, прикрепленному к пли те 10, присоединены концы 17 цепей 18, как э о видно из фи . 1.Другпс концы 19 цепей 18 присоединены к винтам 20 при помощи траверс 21, Один нз винтов 20 имеет правую, другой - левую нарезку и они лишены возможности вращаться относительно цилиндра 15, благодаря наличию продольной шпонки. Передвижение этих винтов зсуществляется путем вращения шестеренок 22, снабженных резьбой, Эти шестеренки, помещенные в радиально упорных подшипниках 23, сцепляются с шестеренкой 24. Подшипники 23 прикреплены к цилиндру 15. Шестерни 24 насаяены на полый вал 25, Через вал 25 проходит концентрический ему вал 2 б, на котором посажена шестеренка 12. К цилиндру 15 прикреплена крышка 27 с радиально упорным подшипником 28, который вращается вокруг полого вала 29 с кольцевым выступом 30, На внутренней цииндричсской части крышки 27, пониже подшипника 28, имеются нарезанные продольные пазы 31, а на внутренней цилиндрической части детали 29 - крупная многозаходная резьба 32 с большим шагом. Деталь 33 имеет соответствующую павам 31 и резьбе 32 обработанную поверхность и центральный канал с винтовой нарезкой, в который гвинчивается нарезанный полый вал 34, Вал 34 с кольцевым вы. ступом 35 вращается в радиально упорном подшипнике Зб детали 29 и снабжен конической шестерней 37, посаженной на его конце. Кониче,- ские шестерни 38 и 39 прикреплены к валам 25 и 26, проходящим через внутреннее отверстие полого вала 34.Кожух 40 подшипника 36 несет цепные колеса 41. Ось 42 этих колес является осью сустава всего описанного звена. Вокруг нее вращаются тоже конические шестерни 43, 44, 45, передающие движение шестерен 46, 47, 48 шестерням 37, 38, 39.Устройство сустава плеча андроида не отличается от описанного сустава предплечья, если не принимать во внимание его больший размер и трехполые валы 49, 50, 51, на которых насажены шестерни 4 б, 47, 48, передающие предплечью и щипцам рабочий момент. Числовые обозначения с одним штрихом обозначают детали, аналогичные только что описанным.Для следующего звс а андроида обозначения с двумя штрихами также соответствуют аналогичным уже описанным деталям, Вращение цилиндра 52, установленного на подшипниках 53 и 54 производится при помощи червячного колеса 55, прикрепленного к цилиндру 52, и червяка 5 б сервомотора.Из фиг. 1 и 3 видно, что любое движение звена, как вокруг соб ственной оси, так и в суставах относительно друг, друга, может производиться вращением колес 57, 58.59, 60, 61, 62, имеющих общую центральную ось.Механическую конечность, например, руку можно заставить поворять все движения, которые выполняет управляющий ею человек.Знергию, необходимую для приведения конечности в движение, можно заимствовать из внешних источников, например, от индивидуальных электродвигателей бЗ, 64, 65, 66, б 7, б 8, 69 (фиг. 3), по числу суставов конечности.Каждый сустав имеет свой индивидуальный передаточный аппарат, заканчивающийся коническими шестернями, червячной передачей и т, и. Направление каждого движения сустава и величина угла передвижения зависят от направления и величины движения соответствующих суставов человека, управляющего машиной.Управление двигкением конечно. сти осуществляется следующим образом. Управляющий машиной человек 70 надевает на руку датчики импульсов, обозначенные цифрами бЗ - 69. Датчики соответствуют суставам Ш - Ш 7 механической конечности. Каждое движение датчика вызывает передвижение контакторов сервомоторов в одном или другом направлении посредством тяг Б, - Б и не показанной на чертеже тяги Б, к контактору П-,. Та,/20 ЫРЗВ 3323-:.,фа гв о - -. г;Ж 17"Ф;, .м-". - :; - , - :=-гв ввгв вв гв 99 4-.-: -"=гг гг ц гггвгв гг кнм образом получается включение соответствующих реверсивных электромуфт. Выключение получается автоматически при помощи упомянутых сервомоторов в тот момент, когда машина повторила полностью приказанное движение.Управление конечностью м покет быть автоматизированным. Для это. го датчики выполняются в виде кулачковой системы. Предмет изобретенияАндроид (человекоподобная машина), у которого механическая конечность составлена из звеньев, поворотных в суставах друг относительно друга и приводимых в движение из центрального пункта при помощи механической передачи от сервомоторов, о тл и ч а ю щ и й с я тем, что означенная передача состоит из нескольких - по числу звеньев - систем концентрично расположенных полых валов, которые соединены в суставах при помо.ци укрепленных на концах полых ва,1 ов конических зубчатых шестерен 1 ерез посредство систем промсжуточных шестерен, расположенных в суставах и служащих: одни для поворота звеньев вокруг их собственных продольных осей, и другие - для вращения расположенных в суставах цепных колес, предназначенных для осуществления поворота звеньев в суставах относительно друг друга,
СмотретьЗаявка
18704, 03.09.1938
Штернфельд А. Я
МПК / Метки
МПК: F16H 3/02, F16H 59/00
Метки: андроид
Опубликовано: 01.01.1946
Код ссылки
<a href="https://patents.su/4-67162-android.html" target="_blank" rel="follow" title="База патентов СССР">Андроид</a>
Способ преобразования вращательного движения ведущего звена вокруг оси во вращательное движение ведомого звена вокруг точки

Номер патента: 1825923
Опубликовано: 07.07.1993
Авторы: Власенко, Карулин, Кузьмичев, Лебедев
МПК: F16H 21/00
Метки: ведомого, ведущего, вокруг, вращательного, вращательное, движение, движения, звена, оси, преобразования, точки
...сообщают ведущему звену с помощью привода вращательное движение вокруг оси и преобразуют это движение во вращательное движение ведомого звена вокруг точки, о т л и ч а ю щ и й с я тем, что, с целью повышения экономичное экон стройст едущее звено 1 с и на оси 3, и веое в виде сферы с представляет соиную траекторию 5,СпосоществляютПриводвижениепреобразуное движе преобразования движения осуследующим образом:ом 2 создается вращательное едущего звена 1 вокруг оси 3 и ют это движение во вращательие ведомого звена вокруг точки. ОСУДАРСТВЕННОЕ ПАТЕНТНОВЕДОМСТВО СССРГОСПАТЕНТ СССР) ОПИСАНИЕК АВТОРСКОМУ СВ(54) СПОСОБ ПРЕТЕЛЬНОГО ДВИНА ВОКРУГ ОСДВИЖЕНИЕ ВЕТОЧКИ. Изобретение относится к спобразования механического двжет быть использовано в...
Устройство для определения параметров движения выходного звена манипулятора

Номер патента: 1827344
Опубликовано: 15.07.1993
Автор: Мельник
МПК: B25J 9/02
Метки: выходного, движения, звена, манипулятора, параметров
...В корпусе 8 расположены как минимум шесть чувствительных элементов 11, образующих измеритель относительного положения плитки 10 и корпуса 8, Выходы датчиков перемещений 7 и чувствительных элемен. тов 11 подключены к входам вычислительнорегистрирующего блока 12, который может быть выполнен, например, на базе микро- ЭВМ,Устройство работает следующим образом,.Оператор фиксирует начальное положение рабочего органа манипулятора и включает вычислительно-регистрирующий блок 12, затем запускает манипулятор на выполнение заданного движения. Во время исполнения заданной траектории движения фланец 3 вместе с подвижным узлом 4 будет описывать соответствующую траекторию движения относительно основания 1, При этом стержни 5 будут совершать...
Механизм с движением ведомого звена по замкнутому контуру

Номер патента: 297831
Опубликовано: 01.01.1971
Авторы: Всесоюзный, Кофман, Проектно
МПК: F16H 25/04
Метки: ведомого, движением, замкнутому, звена, контуру, механизм
...движение которого ограничивается упорами.Предлагаемый механизм отличается от известного тем, что кулачок выполнен пространственным цилиндрическим, а толкатель установлен на валу подвижно в продольном направлении,Эти отличия упрощают конструкцию механизма с движением ведомого звена по замкнутому контуру.На фиг. 1 изображен описываемый механизм; на фиг. 2 - то же, продольный разрез.Механизм содержит корпус 1, пространственный цилиндрический кулачок 2, жестко установленный на валу 8, и подпружиненный толкатель 4, установленный подвижно на том же валу 8. Движение толкателя 4 ограничивается упорами б и 6.При повороте вала 3 в направлении стрелки А кулачок 2, взаимодействуя с толкате лем 4 через палец 7, перемещает его (при воздействии...
Механический усилитель мощности с поступательным движением выходного звена

Номер патента: 484344
Опубликовано: 15.09.1975
Авторы: Гейшерик, Кобринский, Левковский
МПК: F16H 25/20
Метки: выходного, движением, звена, механический, мощности, поступательным, усилитель
...1 и размещенный в нем силовой двигатель 2, управляющий двигатель 3, кинематическую передачу, выполненную в виде несамотормозящей пары винт 4 - гайка 5, фрикцион 6, соединяющий связанную с ль работает следующим образом.Усилие от двигателя 2 направлено вдольвинта 4, который воздействует на гайку 5.Фрикцион 6 прижимается к корпусу 1 и препятствует осевому смещению винта 4, кото О рый стремится повернуть гайку 5. Однако принеподвижном управляющем двигателе 3 система остается без движения, так как момент, создаваемый винтом 4 на гайке 5, уравновешивается моментом трения между фрикцио ном 6 и корпусом 1. При подаче сигнала науправляющий двигатель 3 он начинает вращаться и стремится отодвинуть фрикцион 6 в осевом направлении от корпуса 1 и тем...
Устройство для перемещения каретки в наборной машине

Номер патента: 749691
Опубликовано: 23.07.1980
Авторы: Арсентьев, Баркалов, Гладышев, Десятник, Ковалева, Соколов, Щербатенко
МПК: B41J 7/00
Метки: каретки, машине, наборной, перемещения
...стороной в стопорное кольцо 33, а другой -во внутреннее кольцо подшипника 34 и имеет озможность люфта. На валу-шестерне 18 становлено стопорное кольцо 35, для иквидации его осевого смещения. Первый разрядный механизм не имеет зубчатого колеса и его вал 16 установлен неподвижно относительно корпуса 1. Каждый вал-шестерня пРедыдущего разрядного механизма связан с шестерней, смонтированной на валу 16, последующего разрядного механизма, образуя зубчатые пары 36-37; 38-39;40-41; 42-17 и 18-43.Диаметр шестерен 36, 38, 40, 42, 18 и 15 в два раза меньше диаметра зубчатых колес 37, 39, 41, 17 и 43.Устройство работает следующим образом.При поступлении определенного сигнала выборочно срабатывают те или иные электромагниты, например 44, 45, 46, 47....
Предыдущий патент: Пьезоэлектрический элемент
Следующий патент: Взрывобезопасная электрическая лампа накаливания
Случайный патент: Преобразователь в двоичный параллельный код