Система управления электрогидравлическим приводом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 643831
Авторы: Илюхин, Казмиренко, Кокошкин, Меркушев

Текст
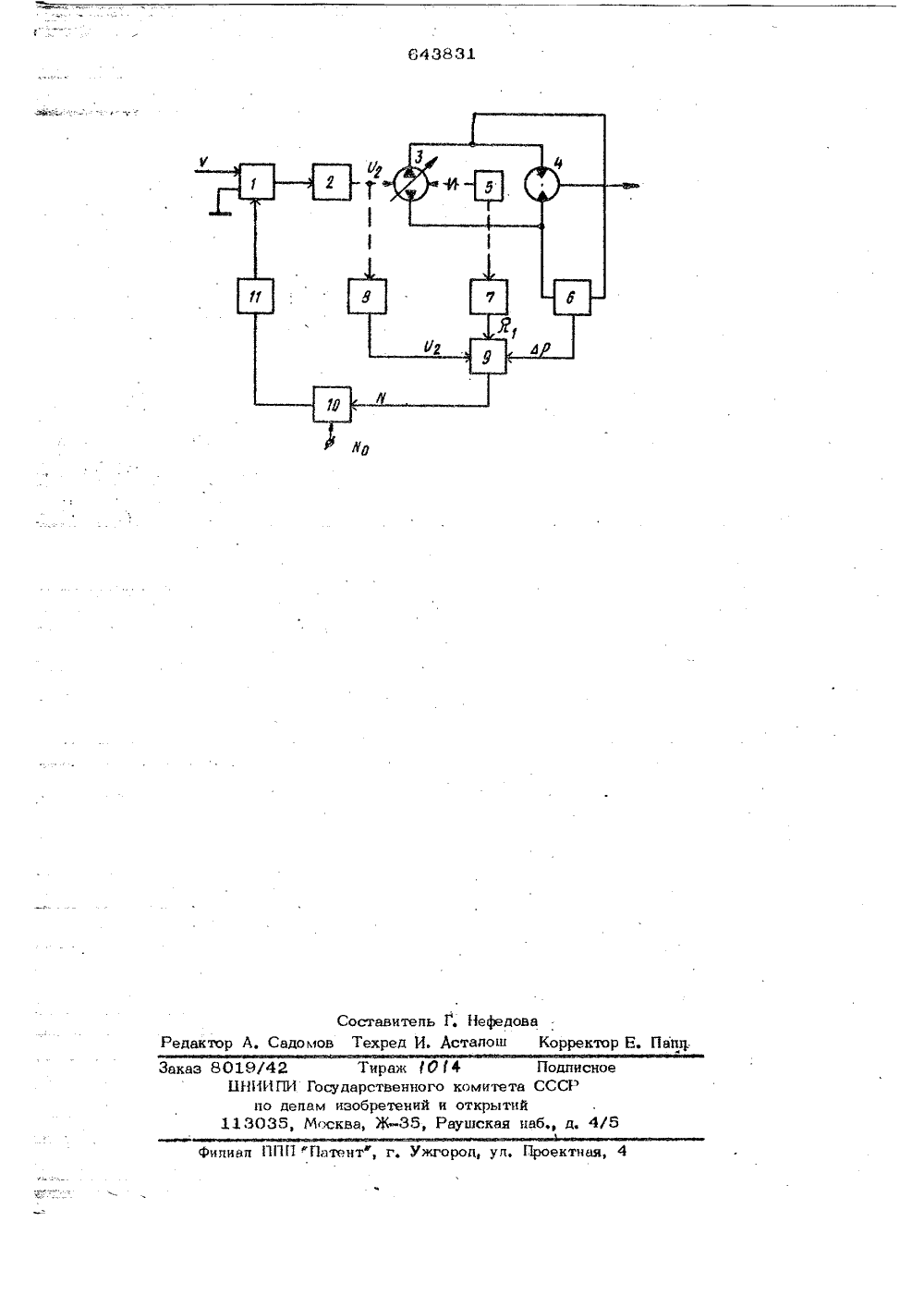
(1 64383 1 еще Соввтснмк Сецмалмстммасаа Реевубпмн) Заявлено 03.11.76 (21) 2417537/18-24 5 Ст 05 В 11 Гевудерстееннаа каепет СССР нн делам нзебретвннй и етцетий(72) Авторы иэобретени ошки ч В 4 Ф Илюхин, В, Ф. Казмиренко, Н и А Р. Маркушев 73) Заявит 4) СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОГ ПРИВОДОМжет быт огидравГСП) о назначепьных, попух привод- мощности,Известны ЭГ изм управпенияный гидронасос П, содержащие мех регулируемый объе связанный с испопн Изобретение относится к об томатического унравления и м испопыювано в синовых электр пических следящих приводах ( объемного управления широког ния, например. машиностроитечающих энергию от автономньных двигатепей ограниченно Преимущественная область применения - ЭГСП автономных обьектов с жесткими ограничениями к потребпяемой мощ ности, весу и габаритам привода, Примером применения могут служить ЭГСП станков, роботов, манипуляторов, передвижных автономных установок, понучающих энергию от источников энергии, например систем эпектрического питания (СЭП) ипи приводных двигатепей ограниченной мощности,С а те ьным гидромотором силовыми гидравпическими магистрапями, к которымподкпючен датчик перепада давпения Я,Известные ЭГСП имеют приводныедвигатепи(ПЦ, мощность которых выбирается в соответствии с возможныммаксимапьным значением мощности гидропривода. Эта максимапьная мощностьПД испоаьзуется относительно уедко и .топько в переходных процессах при больших рассогпасованиях, но из-за ограниф ченной перегрузочной способности обуснавпивает завышение установленной мощности приводного двигатепя и перегрузку СЭП, В процессе слежения обычнонеобходимо обеспечить пибо максимапьные скорости исполнительного механизма при средних значениях момента, либомаксимапьные моменты при малых сюростях движения испопнитеньной ОсирПри этом ПД, позвопяющий попучить указанные режимы работы ЭГСП, развиваетмощность значительно меньше установпенной предепьной, соответствующей сучетом перегрузки одновременному дей20 ствию развиваемых гидроприводом максимапьных скоростей и моментов спежения,В ряде случаев к. ЗГСП предъявпяются требования по жестким ограничениям, 5напоженным на потребляемую от источника энергии ипи Пд мощность.Однако указанные ЗГСП не содержат специапьных связей, обеспечивающихограничение потребпяемой от источника Оэнергии мощности, что приводит к неоправданному завышению. габаритно-весовых данных ЭГСП в цепом, а в отдепьных спучаях и к функционапьнымотказам. Зто явняется существенным 15недостатком рассматриваемых ЭГСП автономных устройств иобъектов с ограниченной мощностью источников энергии,Наибопее бпизка к изобретению посвоей технической сущности известнаясистема управления эпектрогидравличес. ким приводЬм 2, содержащая механиэм управления, выход которого соединен с регулируемым объемным гидронасосом, связанным с испопнитепьнымгидромотором синовыми гидравпическимимагистралями, к которым нодкпючен датчик перепада давпения, и приводнойдвигатель, вап которого соединен с ваном регулируемого объемного гидронасо 30сааЗта система при использовании ее вЭГСП с ограничением по потребляемоймощности имеет спедующие недостатки;- мап диапазон ограничения (отно 35шение предепьной мощности гидропривода к развиваемой мощности проводногодвигателя, который не может быть большим из-за линейного характера обрат 40,ной связи нри ограничении- йогрешность ограничения веникадаже в статических режимах, так как схема не позвопяет осуществить ограничениепо произведению координат;- уровень ограничения в даннои схемеО 45не может быть изменен в процессе работы ЗГСП при изменении скорости вращения приводного вана насоса;- невозможен переход с одного уров 50ня ограничения на другой при работеЗГСП как в разпичных оежимах работы,так и при применении разных привоиыхдвигатепей в комбинированных энергетических установках ЗГСП автоноьапдх55обьектов.Все эти частные недостатки приводятк основному: бопьшие веса, габаритыи потребляемая мощность привода,Цепь изобретения - упрощение привода и уменьшение потребляемой мощности ;привода.Зта цепь достигается тем, что сис тема содержит датчик положения механизма управлении, датчик скорости приводного двигателя, бпок перекшочения, блок сравнения, репейный эпемент и бпок умножения, соответствующие входы которого подкпючены к выходам датчиков перепада давпения, попожения механизма управлении и скорости вала приводного двигатепя, выход через бпок сравнения и репейный пемент соединен с управляющим входом блока перекпючения, другой вход которого связан со входом системы, а выход соединен со входом механизма управления.На чертеже представпена блок-схема системы управпеяия эпектрогидравпическим приводом. Она содержит блок переключения 1, механизм управпения 2, регупируемый объемный гидронасосЭ, исполнительный гидромотор 4, приводной двигатепь 5, датчик 6 перепада давпения, датчик 7 скорости приводного двигателя 7, датчик 8 попожения механизма управления, блок умножения 9, блок сравнения 10 и репейный энемент 11.На чертеже обозначены:50- сигнап, пропорциональный заданному уровню ограничения мощности, потребляемой от источника энергии;М - ,текущее значение мощности, развиваемой в гидроприводе;Я; скорость приводного двигатепя: О - угол поворота регупирующего орГгана насоса;Ь р - разность давления в силовых по" ,постях гидронасоса.В этой схеме нелинейную пороговую обратную связь образуют бпок умножения 9, блок сравнения 10, репейный элемент 11, управпяюаие работой бпока перекшочения 1..Система управления ЭГСП работает следующим образом. На один из входов блока 1 перекпючения подается нормальный сигнап управпения У , опреденяемый ошибкой ЗГСП, а на другой - нупевой сигнал, что усповно изображено на схеме в виде заземления одного из входов блока перекшочения 1.Бпок перемножения О спужит дпя непрерывного вычислении текущего значения мощности М, потребляемой ЗГСГ 1 от приводного двигателя 5. Йействительно, мощность воздействия гидропривода на приводной двигатель равнай:,Р,арам,где К - размерный коэффициент.Если потребляемая мощность не превышает допустимую мощность Ив, то выходной сигнал сумматора блока сравнении 10 не приводит к срабатыванию релейного элемента 11 и, следовательно, 16блока переключения 1, Таким образом,нв вход механизма управления 2 поступает сигнал, и ЭГСП функционирует обычным образом.В случае, когда потребляемая ЭГСП Имошность Й становится больше заданного допустимого уровня Ио, блок сравнения 10 и репейный эйемент 11 вырабатывают сигнал, приводящий к срабатыванию блока переключении 1, и на вход 20механизма управления поступает нулевой сигнал. Это приводит к тому, чторегулирующий орган насоса начинаетдвижение к нейтральному положению исоответствующему уменьшению потребляемой мощности. Как только потребляемая мощность станет меньше допустимой, подключветси сигнал 7 и,если затем мощность превысит разрешенный уровень, снова происходит переключение схемы управления ЗГСП нанулевой входной сигнал, и процедура,повторяется. Среднии составляющаяколебаний нв входе механизма управле 7 Янии, передаваемая нв регулирующий орган насоса, соответствует такому егоположению, при котором потребляемаямощность равна допустимой. Эти колебании регулирующего органа насоса малой4 памплитуды и высокой частоты являются результатом работы введенной вЭГСП нелинейной корректирующей связи.Колебании прекратится, когда в результате обработкирассогласования сигнап 74уменьшится до величины, не вызывающей превышения допустимой величины, потребляемой мощности. Дальнейшеефункционирование ЗГСП происходит обычным образом, В результате осушествпиет 50ся ограничение потребляемой ЭГСПмощности ПД.Сущность изобретения подтверждаеъси проверкой модели ЭГСП на ЦВЯ, атакже при экспериментальном исследовании реального ЭГСП, В частности, приисследовании нв БВМ установлено, чтоЭГСП, силовая часть которого имеетпредельную мощность 109 квт, нормаль 16о работает, удовлетворяя заданным техническим требованиям, при наличии приводного двигателя мощностью всего 30 квт. Реализация такого ЭГСП в условиях автономного объекта позволит существенно снизить вес и объем аппаратуры источников энергииПрименение описанной системы управления позволит ограничить потребляемую от источника мощность, исюпочить функциональные отказы по причине превышения заданного уровня потреблие мой мощности, повысить КПЙ приводного двигателя и, таким образом, снизить вес и объем силовой аппаратуры ЗГСП в целом,Формула изобретенияСистема управления электрогидрввлическим приводом, содержащая механизм управлении, выход которого соединен с регулируемым объемным гидронвсосом, связанным с исполнительным гидромотором силовыми гидравлическими магистралями, к которым подключен датчик перепада давления, и приводной двигатель, вал которого соединен с валом регулируемого объемного гидронасосв, о тл и ч а ю ш а и с и тем, что, с целью упрощении и уменьшения и потребляемой мощности привода, онв содержит датчики положения механизма управления, датчик скорости приводного двигатели, блок переключении, блок сравнения, репейный элемент и блок умножения, соответствующие входы которого подкшочены к выходам датчиков перепада дввпения, положения механизма управления и скорости вала приводного двигателя, вы;.ход через блок сравнения и репейный элемент соединен с управляющим входом блока переключения, другойвход которогосвязан со входом системы, а выход соединен со входом механизма управления.Источники информации, принятые вовнимание при экспертизе:1. "Злектрогидравлический следящий приводф, нод ред. Е. А. Хохлова, Машиностроение, М., 1971. с. 287-307.2, Кулагин А. В., Демидов Ю. С., Прокофьев В. Н., Кондаков Л. А, - Основы теории и конструирования объемныхИгидропередвч, Высшая школа, М., 196 с. 33-36.643831 Составитель Г. НефедоваСадомов Техред И, Асталош Корректор Е. Па 1 щ ед ал ППП фПатентф, г. Ужгород, ул. Проектная, 4 каз 8019/42 Тираж О Ш 1 ИИ ПИ Государственног но делам изобретений 113035, Москва, Ж, ф Подлисное комитета СССР открытийаушская наб., д. 4/5
СмотретьЗаявка
2417537, 03.11.1976
ПРЕДПРИЯТИЕ ПЯ А-1658, МОСКОВСКОЕ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
ИЛЮХИН ЮРИЙ ВЛАДИМИРОВИЧ, КАЗМИРЕНКО ВЯЧЕСЛАВ ФЕДОРОВИЧ, КОКОШКИН НИКОЛАЙ НИКОЛАЕВИЧ, МЕРКУШЕВ АЛЕКСАНДР РОДИОНОВИЧ
МПК / Метки
МПК: G05B 11/06
Метки: приводом, электрогидравлическим
Опубликовано: 25.01.1979
Код ссылки
<a href="https://patents.su/4-643831-sistema-upravleniya-ehlektrogidravlicheskim-privodom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления электрогидравлическим приводом</a>
Узел соединения структурного блока покрытия с колонной

Номер патента: 1737076
Опубликовано: 30.05.1992
Авторы: Клименюк, Павлов, Федоренко
МПК: E04B 1/38
Метки: блока, колонной, покрытия, соединения, структурного, узел
...в опорной плите 2 колонны и имеющего верхнюю часть в виде треугольной призмы 3, и фиксирующего элемента, представляющего собой прямоугольную ячейку 4, прикрепленную над отверстием опорного столика 5 блока покрытия. В ячейке вплотную друг к другу вертикально расположены пластины 6, опирающиеся своими выемками на выступы стенок ячейки, Нижнее ребро каждой пластины выполнено с зубьями 7, повторяющими форму треугольной призмы шипа. На всех пластинах положение зубьев и впадин между ними совпадает.Монтаж узла осуществляется следующим образом.Монтажным механизмом поднимают блок с установленными на нем фиксирующими элементами несколько выше проектной отметки, ориентируют его с помощью монтажных расчалок отверстиями опорных столиков...
Устройство для автоматического регулирования мощности руднотермической электропечи с четным числом электродов

Номер патента: 601838
Опубликовано: 05.04.1978
Авторы: Максимов, Степаньянц
МПК: H05B 7/148
Метки: мощности, руднотермической, четным, числом, электродов, электропечи
...перемещения другого электрода этой пары.На чертеже изображена блок-схема предлагаемого устройства для одной фазы печи,Устройство содержит для каждого электрода блоки 1, 2 измерения и задания активной мощности, блоки 3 и 4 сравнения и усиления первого п второго электродов и блоки 6 и 6 управления исполнительным механизмом перемещения первого и второго электродов соответственно.Выход блоков 1, 2 каждого электрода подключен ко входу блоков г, 4 того же электрода, а выход блоков 3, 4 одного электрода подключен ко входу блоков 5, 6 другого электрода, подключенного к той же обмотке печного трансформатора 7 первой фазы,Устройство содержит также исполнительные механизмы 8 и 9 первого и второго электродов соответственно. При отклонении...
Устройство для демпфирования системы приводной двигатель механизм

Номер патента: 1713069
Опубликовано: 15.02.1992
Автор: Быков
МПК: H02P 5/06
Метки: двигатель, демпфирования, механизм, приводной, системы
...двигателем и механизмом.Цель изобретения - повышение надежности,На чертеже представлена схема устройства,устройство содержит демпфирующую электрическую машину 1, соединенную через управляемый преобразователь 2 с электрической сетью 3. К управляющему входу преобразователя 2 подключен выход системы 4 управления, первый вход которой соединен с выходом последовательной цепью, состоящей из датчика 5 колебаний, фазовращателя 6 и усилителя 7, а второй - с выходом источника 8 опорного напряжения. Привод содержит приводной двигатель 9, соединенный упругой механической связью 10 с механизмом 11, Датчик 5 колебаний соединен супругой механической связью 10 или с приводным двигателем 9 или механизмом 11.Преобразователь 2 представляет собой...
Устройство для вычисления средней мощности случайных сигналов

Номер патента: 785871
Опубликовано: 07.12.1980
МПК: G06F 17/18
Метки: вычисления, мощности, сигналов, случайных, средней
...подключены соответственно к первому и второму выходам треггера. Вхоц блока Формирона- ЗОния интервала времени соединен совторым выходом триггера, первым,вторым, третьим, четвертым и пятымныходами блока управления являютсясоответственно выход блока формированин интервала времени, выход второго з.лемента И, выход генератораимпульсон, выход первого элемента Ии первый выход триггера.Структурная схема устройстна показана на Фиг.1; на фиг.2 представленасхема блока управления,Устройство содержит блок 1 согласования, выход которого соединен спервым входом первого блока переключения 2, выход которого соединен синформационным входом АЦП 3, выходкоторого соединен с первым входомвторого блока переключений 4, одинвыход которого подключен к...
Устройство для измерения реактивной мощности

Номер патента: 890259
Опубликовано: 15.12.1981
Авторы: Буняк, Елизаров, Лупенко
МПК: G01R 21/06
Метки: мощности, реактивной
...фаз; выдает регистрирующемуустройству 18 текущее значение номера гармо 4ники, а также идентифицирует сигнал, анэли.зируемый. в данный момент.Работа всего устройства синхронизируетсячастотой исследуемого напряжения, для чегона блок управления 10 поступает напряжениефазы А.Устройство работает следующим образом.Трехфазное напряжение промышленной сетии напряжения, пропорциональные току каждойфазы, снимаемые. с помощью трансформатора1 тока через масштабные преобразователи 2 и3 соответственно, поступают на коммутатор 4,который под воздействием блока 10 управления коммутирует последовательно во временифазы напряжения А, В, С и напряжения, пропорциональные токам фаз А, В, С. Выходнойсигнал коммутатора 4, соответствующий напряжению (или току)...
Предыдущий патент: Следящая система с отражением усилия
Следующий патент: Адаптивная следящая система
Случайный патент: Устройство для вычисления дисперсии случайного процесса