Круговой интерполятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
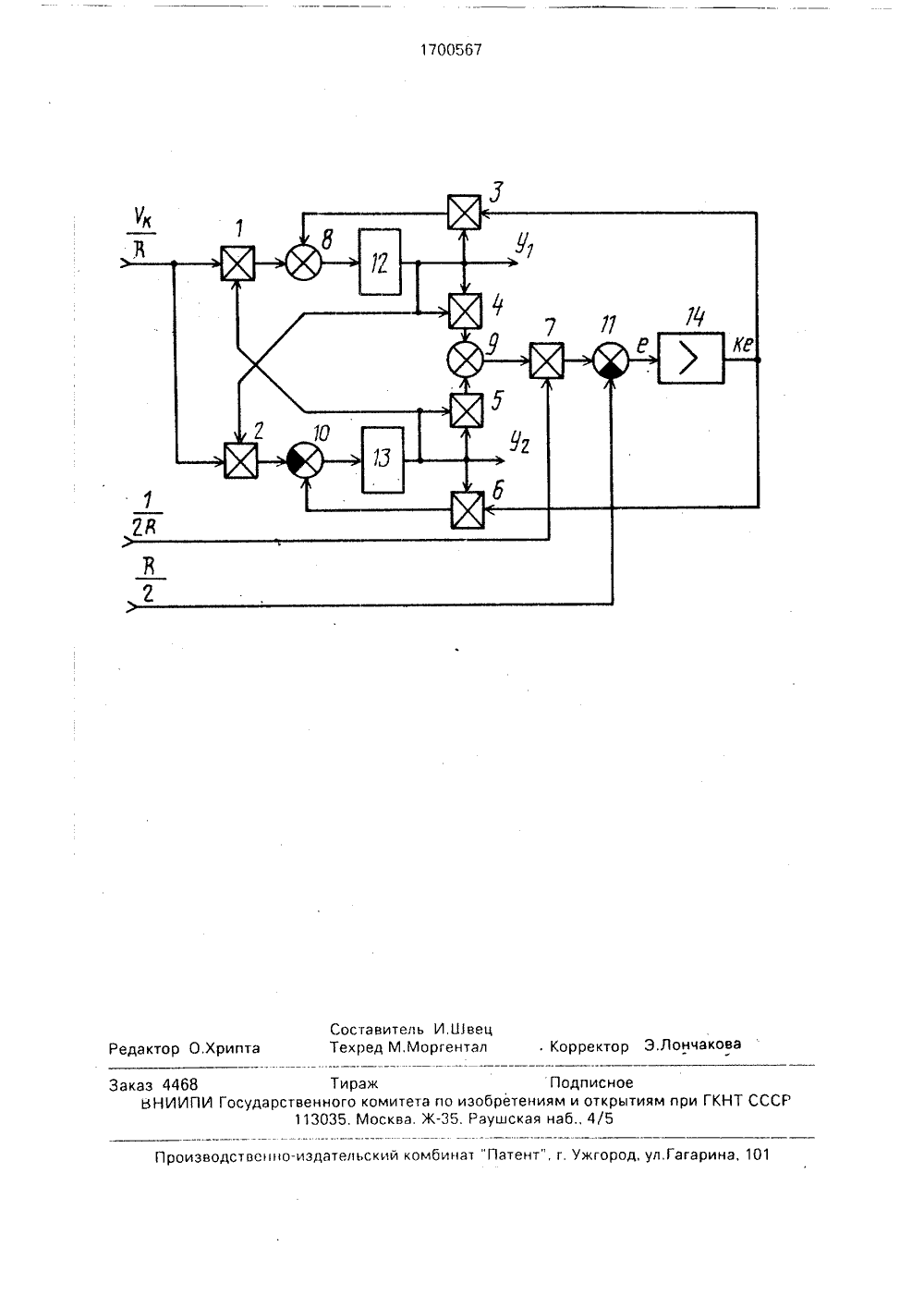
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК ИС БРЕТЕНИЯ СВИДЕТЕЛЬСТВУ ВТОРСКО точной меха ник, В,О.Ниограмм ного шинострое Изобретение относится к устройствам автоматического управления и может быть использовано в системах программного управления.Известен круговой интерполятор, построенный по методу оценочной функции, в котором блок расчета оценочной функции определяет величину отклонения от заданной траектории, после чего в зависимости от знака оценочной функции производится изменение одного или обоих выходных сигналов интерполятора на фиксированную величину (шаг). Постоянство шага обуславливает независимость скорости компенсации отклонения от величины отклонения, что приводит к низкой динамической точности устройства,Наиболее близким к предлагаемому интерполятору является круговой интерполятор, содержащий два блока перемножения (БП), два интегратора и инвертор, задающий вход интерполятора подключен к первым входам первого и второго БП, выход первого БП соединен с входом первого интегратора,ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(57) Изобретение относится к устройствам автоматического управления и может быть использовано в системах программного управления движением. Цель иэобретения - повышение точности задания круговой граектории. Поставленная цель достигается использованием значения оценочной функции для пропорциональной коррекции скоростей изменения выходных сигналов ингерполятора. 1 ил,а выход второго БП через инвертор соединен с входом второго интегратора, второй вход первого БП соединен с выходом второго интегратора, а второй вход второго БП соединен с выходом первого интегратора, выход первого интегратора является перВым информационным выходом кругового интерполятора, а выход второго интегратора является вторым информационным выходом интерполятора,Недостатком указанного интерполятора является накопление ошибки интегрирования, вызванное ограниченной точностью используемых интеграторов и технологическим разбросом параметров элементов устройства, что приводит к снижению точности задания траектории,Целью изобретения является повышение точности задания траектории.Поставленная цель достигается тем, что в круговой интерполятор, содержащий два блока перемножения, два интегратора, первый задающий вход интерполятора подключен к первым входам первого и,второго55 блоков перемножения, второй вход первого блока перемножения соединен с выходом второго интегратора, а второй вход второго. блока перемножения соединен с выходом первого интегратора, выход первого интегратора является первым информационным выходом интерполятора, выход второго интегратора является вторым выходом интерполятора, дополнительно введены пять блоков перемножения, два сумматора, два элемента сравнения и инвертирующий масштабный усилитель, выход первого блока перемножения соединен с первым входом первого сумматора, выход которого соединен с входом первого интегратора, выход третьего блока перемножения подклк)чен к второму входу первого сумматора, выход второго блока перемножения соединен с инвертирующим входом первого элемента сравнения, выход которого подключен к входу второго интегратора, выход четвертого блока перемножения подключен к первому входу второго сумматора, второй вход которого соединен с выходом пятого блока перемножения, входы которого подключены к выходу второго интегратора и к первому входу шестого блока перемножения, выход второго сумматора соединен с первым входом седьмого блока перемножения, второй вход которого подключен к второму задающему входу интерполятора, а выход - к суммирующему входу второго элемента сравнения, инвертирующий вход которого соединен с третьим задающим входом интерполятора, а выход через инвертирующий масштабный усилитель соединен с первым входом третьего и вторым входом шестого блоков перемножения, выход первого интегратора соединен с вторым входом третьего и первым и вторым входами четвертого блоков перемножения, выход шестого блока перемножения подключен к суммирующему входу первого элемента сравнения,На чертеже приведена схема кругового интерполятора. Круговой интерполятор содержит блоки 1 - 7 перемножения, сумматоры 8 и 9, элементы 10 и 11 сравнения (ЭС), интеграторы 12 и 13 и инвертирующий масштабный усилитель 14. Первый задающий вход интерполятора подключен к первым входам блоков 1 и 2 перемножения, второй задающий вход интерполятора подключен к первому входу блока 7 перемножения, третий задающий вход интерполятора подключен к инвертирующему входу элемента 11 сравнения, Второй вход блока 1 соединен с выходом интегратора 13, а второй вход блока 2 соединен с выходом интегратора 12. Выход блока 1 соединен с первым входом сумматора 8, к второму входу которого подключенвыход блока 3, а выход блока 2 соединен синвертирующим входом элемента 10 срав 5 нения, суммирующий вход которого подключен к выходу блока 6, Выход сумматора8 соединен с входом интегратора 12, выходкоторого подключен к обоим входам блока4 перемножения и к второму входу блока 3.10 Выход элемента 10 сравнения подключен квходу интегратора 13, соединенного выходом с обоими входами блока 5 и вторымвходом блока 6, Выходы блоков 4 и 5 соединены с входами сумматора 9, выход которо 15 го подключен к второму входу блока 7перемножения. Выход блока 7 соединен ссуммирующим входом второго элемента 11сравнения, который соединен выходом через инвертирующий масштабный усилитель20 14 с первыми входами блоков 3 и 6, При этомна первый, второй и третий задающие входыинтерполятора подаются сигналы У/й,1/2 й и й/2 в соответствии с уравнениемреализуемой траектории25У 1+Уг =й,где У 1 и Уг - выходные сигналы интерполяторов;30 й - радиус окружности;У - величина контурной скорости, В известном интерполяторе задающиевоздействия У 1 и Уг формируются в соответствии с уравнением круговой траектории ра диуса й и заданной величиной контурной скорости40 Ч на основе расчета динамической модели вида; У 1 = УгУк/й, У 1/О/ = У 1 о. Уг = -У 1 У/й Уг/О/ Уго (2) Величина е нормального отклонения оттраектории(1) в малой окрестности траектории определяется выражением: 50е= У+Уг - й=. Дифференцируя (3) по времени в силу (2), получим дифференциальное уравнение, описывающее динамику отклонения от тра- ектории,Динамика отклонения для известного интерполятора будет описываться уравнением;50 е =р - е 2У 1 У 2 Чк/В 2 55ет-Ч 3 У 1тУ 2т от,Гт.е. при е 1 Ф 6,Ф О ошибка не равна нулю,анализ которого показывает, что динамическая модель (2) по отношению к траектории (1) находится на границе устойчивости. 10 Ошибка интерполяции практически непосредственно передается на выход системы.Естественно, что точность работы станка в целом будет определяться также и другими факторами: качеством регуляторов, приво дов, жесткостью механизмов и т.д. Неточность реализации интеграторов приводит к появлению малых погрешностей на их выходах, которые, накапливаясь, порождают постепенное отклонение движения задающей 20 точки от траектории (1), Источниками подобных ошибок любого реального непрерывного интегратора являются ограниченность коэффициента усиления операционного усилителя, на котором реализован интегра , тор, дрейф нуля на его выходе, наличие сиг нальных помех. Основной источникподобных ошибок цифрового интегратора - ограниченная точность регистров, связанная с ограничением разрядной сетки ЭВМ, 30 Поэтому погрешности практической реализации элементов устройства будут приводить, в общем случае, к неограниченному накоплению ошибки е, что ведет к снижению точности интерполятора. 35В основу формирования задающих воздействий У 1 и У 2 предлагаемого интерполятора положен расчет динамической моделивида: Для предлагаемого замкнутого интерполятора аналогично получаеме =Ке+Ф - Е 1У 1 У 2 ЧкlВет=я 2 - 81У 1 У 2 Чк (В 2К )Таким образом, накопления ошибки не происходит и ее величина обратно пропорциональна коэффициенту К обратной связи,Формула изобретенияКруговой интерполятор, содержащий два блока перемножения, два интегратора, первый задающий вход интерполятора подключен к первым входам первого и второго блоков перемножения, второй вход первого блока перемножения соединен с выходом второго интегратора, а второй вход второго блока перемножения - с выходом первого интегратора, выход первого интегратора является первым информационным выходом интерполятора, выход второго интегратора - вторым информационным выходом интерполятора, отл ич а ю щи йся тем, что, с целью повышения точности задания траектории, в него введены пять блоков перемножения, два сумматора, два элемента сравнения и инвертирующий масштабный усилитель, выход первого блока перемножения соединен с первым входом первого сумматора, выход которого соединен с входом первого интегратора, выход третьего блока перемножения подключен к второму входу первого сумматора, выход второго блока перемножения соединен с инвертирующим входом первого элемента сравнения, выход ,которого подключен к входу второго интегратора, выход четвертого блока перемножения подключен к первому входу второго сумматора, второй вход которого соединен с выходом пятого блока перемножения, входы которого подключены к выходу второго интегратора и к первому входу шестого блока перемножения, выход второго сумматора соединен с первым входом седьмого блока перемножения, второй вход которого подключен к второму задающему входу интерполятора, а выход - к суммирующему входу второго элемента сравнения, инвертирующий вход которого соединен с третьим задающим входом интерполятора, а выход через инвертирующий масштабный усилитель соединен с первым входом третьего и вторым входом шестого блоков перемножения, выход первого интегратора соединен с вторым входом третьего и первым и вторым входами четвертого блоков перемножения, выход шестого блока перемножения подключен к суммирующему входу первого элемента сравнения,1700567 дактор О,Хрипта Корректор Э,Лончак з 4468 ЫНИИП Составитель И,ШвецТехред М,Моргентал Тираж Подписноеосударственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., 4/5 зводстванно-издательский комбинат "Патент", г. Ужгород, ул,Гагарина, 101
СмотретьЗаявка
4726295, 07.08.1989
ЛЕНИНГРАДСКИЙ ИНСТИТУТ ТОЧНОЙ МЕХАНИКИ И ОПТИКИ
БАРСУКОВ ГРИГОРИЙ БОРИСОВИЧ, МИРОШНИК ИЛЬЯ ВАСИЛЬЕВИЧ, НИКИФОРОВ ВЛАДИМИР ОЛЕГОВИЧ, ПОНОМАРЕВ АНДРЕЙ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: G05B 19/4105, G06G 7/30
Метки: интерполятор, круговой
Опубликовано: 23.12.1991
Код ссылки
<a href="https://patents.su/4-1700567-krugovojj-interpolyator.html" target="_blank" rel="follow" title="База патентов СССР">Круговой интерполятор</a>
Аналоговый блок перемножения

Номер патента: 622108
Опубликовано: 30.08.1978
Авторы: Бродовский, Вилков, Морозов, Ольховский, Толмачев
МПК: G06G 7/16
Метки: аналоговый, блок, перемножения
...входным напряжением, ивадратор б, работающий с положительным входным напряжением, масштабные резисторы б - 11.На вход суммирующего усилителя 1 че,рез масштабные резисторы б и 7 подаются напряжения, соответствующие сомножителям х и у, а также положительное напряжение. На выходе этого усилителя отказывается напряжение, соответствующее На вход суммирующподается напряжениемирующего усилителя 1Харьк. фил, пред. Пате и,напряжение с второго входа блока перемножения с коэффициентом /2, на выходе этого усилителя формируется напряжениес Е х - у 1- -+ ). Выходы суммирующих усилите 4 )лей 1 и 2 подключены,к квадраторам 4 и 5 соответственно, вход суммирующего усилителя 3 соединен с,выходами квадратаров 4 и 5 и через масштабный резистор...
Система управления ветряной турбиной

Номер патента: 1098527
Опубликовано: 15.06.1984
МПК: F03D 7/04
...умножения 50 и первый функциональный преобразователь 51.Блок управления мощностью (фиг.б) содержит последовательно соединенные второй функциональный преобразова- зо тель 52, четвертый компаратор 53, апериодическое звено 54, сумматор 55 и третье звено умножения 56, последовательно соединенные пятый компаратор 57 и второе звено динамической коррекции 58, а также третий функциональный преобразователь 59. Кроме того, на фиг. 6 показано звено деления 60.Интегратор (фиг. 7) содержит последовательно соединенные ограничитель 4 О 61, шестой компаратор 62, звено интег рирования 63, ограничитель 64 сигнала интегрирования, четвертый функциональный преобразователь 65 и звено деделения 66,45Третий селектор (фиг, 8) содержит седьмой компаратор 67,...
Устройство для регулирования нятяжения полосы на моталке листопрокатного стана

Номер патента: 1186309
Опубликовано: 23.10.1985
Авторы: Альшиц, Дралюк, Зеленцов, Михайлов, Очеповский, Тикоцкий
МПК: B21B 37/54
Метки: листопрокатного, моталке, нятяжения, полосы, стана
...электропринод 2 моталки, усилитель 3 и блок 4 умножения, второй вход которого соединен с выходом блока 5 умножения, входы которого соединены с выходами датчика 6 скорости полосы и блока вычисления приведенной массы 20 моталки, входящего в состав электро- привода 2 моталки, блок 7 умножения, на второй вход которого через блок 8 ограничения подсоединен выход блока 9 умножения, один вход которого под соединен с выходом задатчика 10 поперечного сечения прокатываемой полосы, другой вход через блок 11 ограничения соединен с выходом .датчика 6 скорости полосы.30 Нелинейный фильтр состоит из последовательно соединенных сумматора 12 и релейного элемента 13 двух ин-теграторов 14 и 15, трех блоков 16, 17 и 18 умножения, причем выход блока 16...
Программно-управляемый цифровой фильтр

Номер патента: 1338006
Опубликовано: 15.09.1987
Авторы: Петрова, Шполянский
МПК: H03H 17/04
Метки: программно-управляемый, фильтр, цифровой
...нуля, обеспечивающий режим записи, после чего по импульсу, поступающему на первый управляющий вход второго блока 7 памяти происходит занесение информации в ячейку по ИА, сформировавшемуся к этому моменту на адресном входе второго блока 7Далее выходное значение накапливающего сумматора 32 суммируется с его входным значением в сумматоре 33 арифметического блока 3 и по управляющему импульсу, поступающему на второй управляющий вход 3-4 арифметического блока 3 с шестого выхода 5-10 блока 5 управления, полученный результат записывается в регистр 34, Так как регистр 34 был сброшен в первой команде, то на выходе накапливающего сумматора образуется произведение ц ,х (п), К содержимому счетчика 28 прибавляется единица по управляющему импульсу,...
Способ гамма-спектрометрии и гамма-спектрометр

Номер патента: 1803896
Опубликовано: 23.03.1993
МПК: G01T 1/36
Метки: гамма-спектрометр, гамма-спектрометрии
...и амплитудой пропорциональной энергии исходного гамма-кванта, Длительность сигнала составляет 3 - 5 мксек, Далее этот сигнал поступает в буферное запоминающее устройство 4, представляющее собой такой же амплитудный детектор. На выходе последнего формируЕтся идентичный по амплитуде импульс, но с более высокой длительностью (20-40 мксек), предназначенный для последующего кодирования в АЦП и амплитудной селекЦии в блоке дифференциальных каналов 9. Применение амплитудного детектора в сочетании с буферным ЗУ позволяет разравнять статистически распределенные во времени сигналы и тем самым уменьшить просчеты при передаче по протяженным линиям связи еще примерно вдвое. С выхода буферного ЗУ 4 сигналы одновременно поступают на вход АЦП 5 и блока...
Предыдущий патент: Устройство для контроля стыковки разъемов
Следующий патент: Устройство для считывания координат с экрана электронно лучевой трубки
Случайный патент: Прибор для проведения лесотаксационных работ