Автомат для сортировки подшипников качения по моменту сопротивления вращению
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
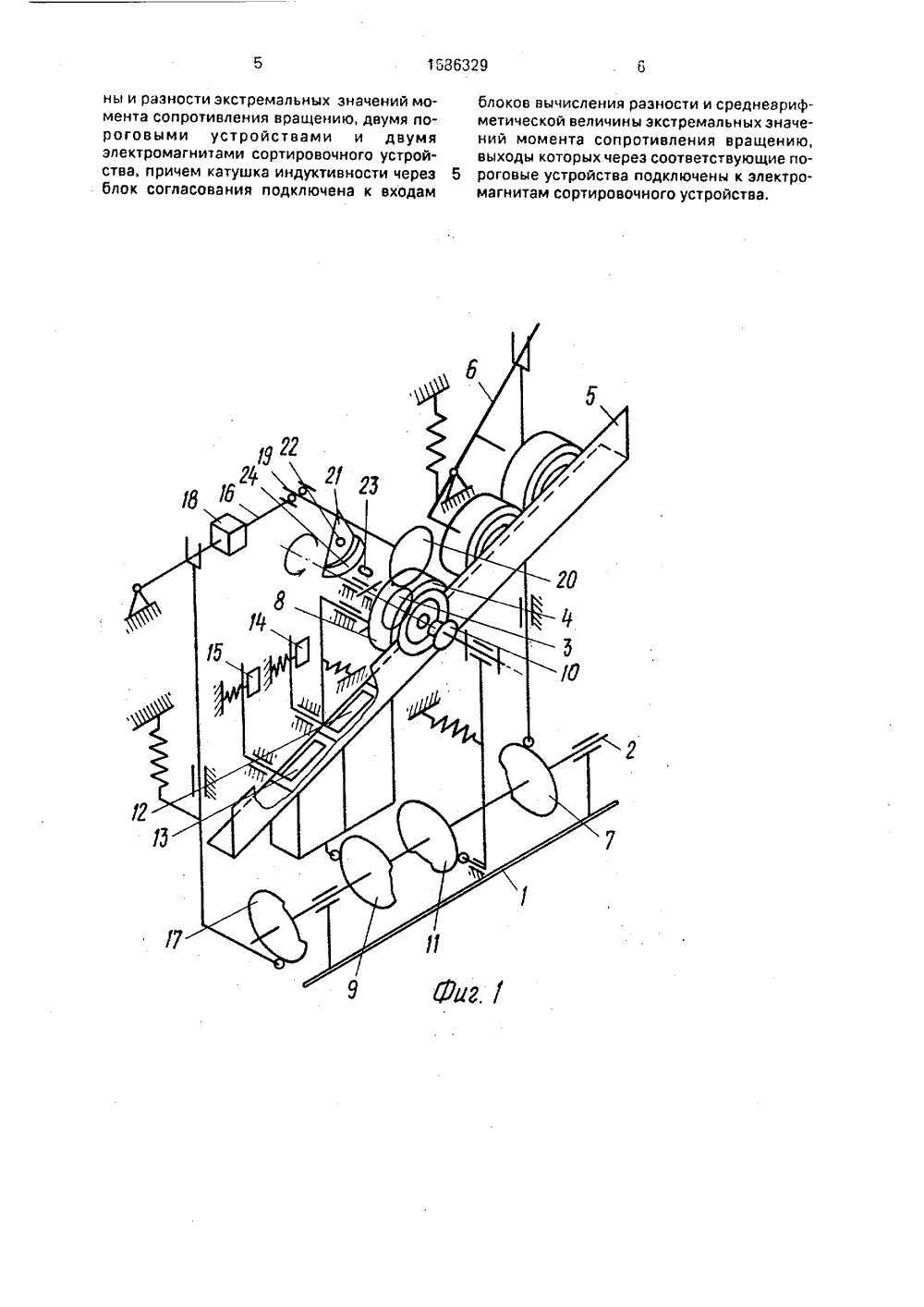
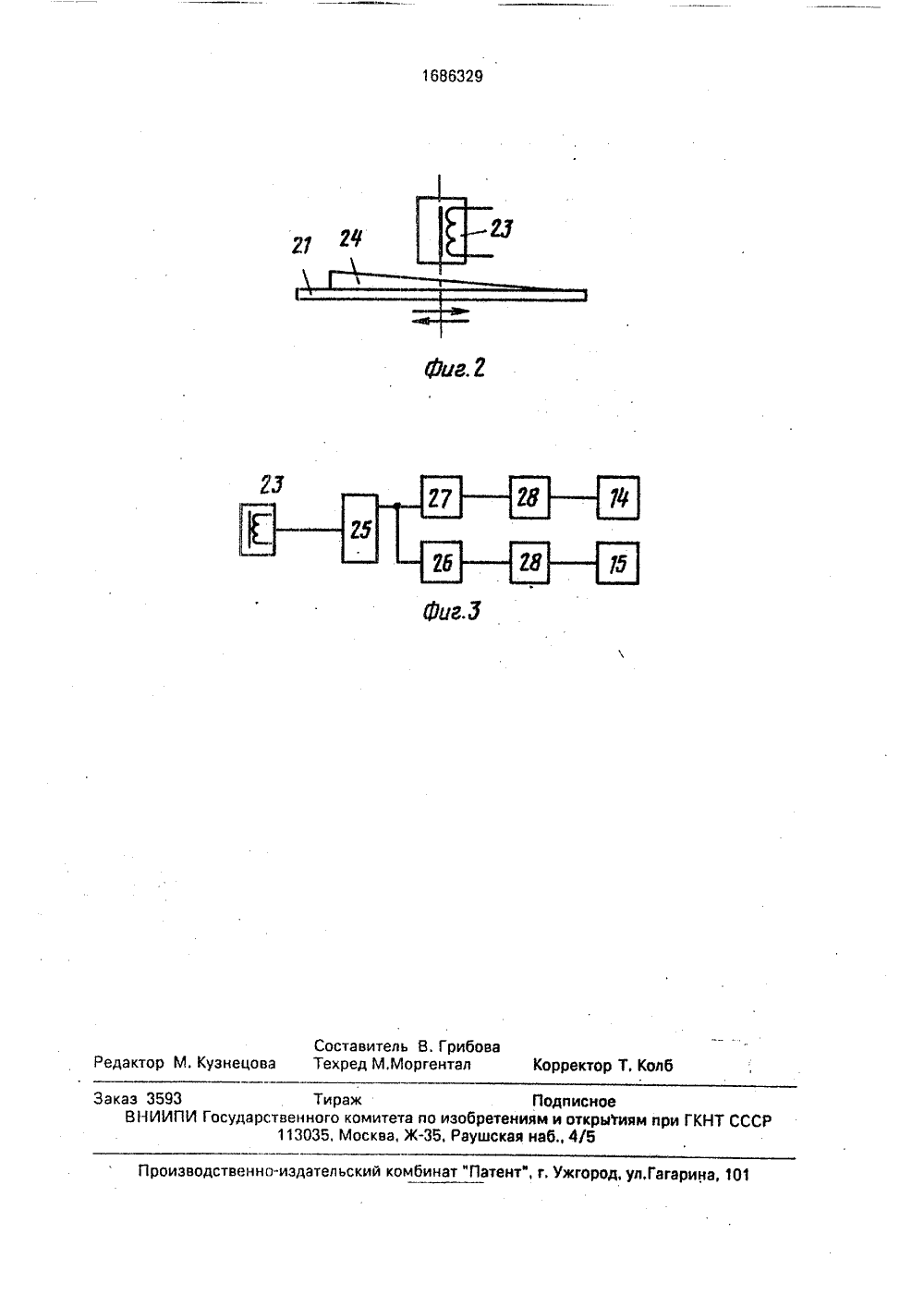
(5)5 6 ГОСУДАРСТВЕННПО ИЗОБРЕТЕНИПРИ ГКНТ СССР КОМИТЕТ И ОТКРЫТ ПИСАНИЕ ИЗОБРЕТЕНИ ИДЕТЕЛ ЬСТВУ АВТОРСКОМ бюро зводнико(21) 4660683/27(71) Специальное конструкторскоетехнологического оборудования проиственного объединения ГПЗ - 4(56) Авторское свидетельство СССРйг 1105769, кл, О 01 М 13/04, 1983,Авторское свидетельство СССРМ 1506319, кл, 6 01 М 13/04, 1987,(54) АВТОМАТ ДЛЯ СОРТИРОВКИ ПОДШИПНИКОВ КАЧЕНИЯ ПО МОМЕНТУ СОПРОТИВЛЕНИЯ ВРАЩЕНИЮ(57) Изобретение относится к подшипвой промышленности и может быть испол Изобретение относится к подшипниковой промышленности и может быть использовано для сортировки подшипников по моменту сопротивления вращению.Цель изобретения - расширение технологических возможностей автомата.На фиг, 1 представлена функциональная схема; на фиг, 2 - представлен узел взаимодействия флажка маятника с катушкой индуктивности; на фиг. 3 - приведена функциональная схема преобразования сигнала от катушки индуктивности.Автомат для сортировки подшипников качения по моменту сопротивления вращению содержит станину 1, на которой установлен привод, обеспечивающий вращение кулачкового распределительного вала 2 и планшайбы 3 механизма вращения внутрензовано для сортировки подшипников по моменту сопротивления вращению, Цель изобретения - расширение технологических возможностей автомата, В автомате измерительная станция снабжена чувствительным элементом в виде катушки и несимметричного флажка маятника, определяющим момент сопротивления вращению в подшипнике, К катушке подключены блоки согласования, вычисления разности и среднеарифметической величины экстремальных значений, которые через пороговые устройства соединены с исполнительными органами сортировочного устройства. Автомат позволяет учитывать комплексный показатель состояния подшипника, зависящий от чистоты рабочих поверхностей, состояния смазки. 3 ил,него кольца контролируемого подшипника 4. В верхней части наклонного лотка 5 установлен механизм 6 поштучной подачи, взаимодействующий с кулачком 7, а в зоне контроля подшипника 4 имеется ловитель 8, взаимодействующий с кулачком 9 и прижимной грибок 10, установленный с воэможностью свободного вращения и принудительного осевого перемещения от кулачка 11, В нижней части наклонного лотка 5 установлены сортировочные заслонки 12 и 13, приводимые в действие посредством электромагнитов 14 и 15, На рычаге 16, взаимодействующим с кулачком 17, крепятся подвижнь 1 й груз 18, а при помощи оси 19 - контрольный маятник, состоящий иэ диска 20 с фрикционным элементом для взаимодействия,с наружным кольцом контролиру 1686329емого подшипника 4 и флажка 21 с грузиком 22, На корпусе автомата против рабочего положения флажка 21 маятника неподвижно установлена катушка 23 индуктивности своею осью параллельно оси 19, Рабочая поверхность 24 флажка 21 находится в плоскости, не перпендикулярной к оси катушки 23 индуктивности. Катушка 23 индуктивности через блок 25 согласования подключена к входам блока 26 вычисления разницы и блока 27 вычисления среднеарифметической величины экстремальных значений момента сопротивления вращению, выходы которых через пороговые устройства 28 соединены с соответствующими электромагнитами 14 и 15 сортировочного устройства,Автомат работает следующим образом, Производят накладку путем установки груза 18, определяющего нагрузку на контролируемый подшипник 4, и установкой грузика 22, определяющего противодействующий момент моменту сопротивления вращению, При вращении распределительного вала 2 от кулачка 7 срабатывает механизм 6 поштучной выдачи подшипника. По наклонному лотку 5 до ловителя 8 скатывается подшипник 4, где от действия кулачка 11 грибок 10, перемещаясь, центрирует и прижимает подшипник 4 внутренним кольцом к вращающейся планшайбе, При этом наружное кольцо подшипника 4 прижимается к подпружиненному ловителю 8, который выполняет дополнительную функцию тормоза наружного кольца при разгоне до рабочей скорости планшайбой 3 внутреннего кольца подшипника 4. От кулачка 17 под действием груза 4 опускается рычаг 16, на конце которого установлен контрольный маятник, до соп икосновения с наружным кольцом подшипника 4 диска 20, При этом флажок 21 маятника входит в зону взаимо-) действия с катушкой 23 индуктивности. По сле этого в результате действия кулачка 9 отводится от наружнго кольца подшипи/ ка 4 ловитель 8, В стадий контроля внутреннее кольцо подшипника 4 .принудительно вращается планшайбой 3, а наружное кольцо удерживается от вращения противодействующим моментом контрольного маятника, который определяется массой грузика 22 и углом поворота флажка 21 вокруг оси 19, Противодействующий момент контрольного маятника соответствует моменту сопротивления вращению подшипника 4. Поэтому при контроле изменения момента сопротивления вращению в подшипнике 4 выражается изменением угла отклонения флажка 21 контрольного маятника, что фиксируется катушкой 23 индуктивности. Регистрация угла отклонения флажка 21 осуществляется приокончании цикла измерения после отвода от 25 подшипника 4 диска 20 контрольного маятника посредством подъема рычага 16 от воз 30 35 5 10 15 20 40 45 50 55 помощи катушки 23 определением расстояния до рабочей поверхности 24 (см. фиг, 2). При контроле подшипника 4 аналоговый сигнал от катушки 23 индуктивности через блок 25 согласования поступает на вход блоков 26 и 27, в одном из которых вычисляется разница, а в другом среднеарифметическая величина экстремальных значений аналогового сигнала в цикле измерения. Полученные величины в пороговых устройствах 28 сравниваются с предельно-допустимыми соответствующими значениями, Если какая- либо из величин превышает предельно-допустимое значение, то с выхода соответствующего порогового устройства 28 подается команда выключения определенного электромагнита 14 и 15 сортировочного устройства, Определенная сортировочная заслонка открывает ячейку соответствующей сортировочной группы, Если же ни одно из предельно-допустимых значений не превышало, то ни одна из заслонок 14, 15 не открывается, Поэтому по действия кулачка 17 и вывод из зоны лотка 5 грибка 10 от воздействия кулачка 11 подшипник 4 под действием своего веса катится по наклонному лотку 5 и в соответствующую ячейку.Автомат позволяет рассортировать подшипники с учетом непостоянства моменту сопротивления качению с высокой точностью. Формула изобретения Автомат для сортировки подшипников качения по моменту сопротивлени вращению, содержащий привод с кулачковым распределительным валом, измерительную станцию с механизмом вращения одного из колец подшипника и маятником, снабженным фрикционным элементом, предназначенным для взаимодействия с другим кольцом подшипника, загрузочный бункер с механизмом поштучной подачи подшипников в измерительную станцию, а также сортировочное устройство, о т л и ч а ю щ и йс я тем, что, с целью расширения функциональных возможностей и повышения качества рассортировки подшипников, измерительная станция оснащена катушкой индуктивности, установленной неподвижно против флажка маятника на оси, параллельной оси маятника, а рабочая поверхность флажка маятника выполнена не перпендикулярной к оси катушки, автомат также снабжен блоком согласования, блоками вычисления среднеарифметической величи 1536329ны и разности экстремальных значений момента сопротивления вращению, двумя пороговыми устройствами и двумя электромагнитами сортировочного устройства, причем катушка индуктивности через 5 блок согласования подключена к входам блоков вычисления разности и среднеарифметической величины экстремальных значений момента сопротивления вращению, выходы которых через соответствующие пороговые устройства подключены к электромагнитам сортировочного устройства.оставитель 8. Грибовахред М Моргентал Корректор Т Реда кт знецова оизводственно-издательский комбинат "Патент", г. Ужгород, ул,Гагарина аказ 3593 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., 475
СмотретьЗаявка
4660683, 10.03.1989
СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ ПРОИЗВОДСТВЕННОГО ОБЪЕДИНЕНИЯ ГПЗ-4
ТРОФИМОВ ЕВГЕНИЙ ИВАНОВИЧ, ИВАНОВ НИКОЛАЙ НИКОЛАЕВИЧ, ОБМОИН АНАТОЛИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G01M 13/04
Метки: автомат, вращению, качения, моменту, подшипников, сопротивления, сортировки
Опубликовано: 23.10.1991
Код ссылки
<a href="https://patents.su/4-1686329-avtomat-dlya-sortirovki-podshipnikov-kacheniya-po-momentu-soprotivleniya-vrashheniyu.html" target="_blank" rel="follow" title="База патентов СССР">Автомат для сортировки подшипников качения по моменту сопротивления вращению</a>
Устройство для измерения момента сопротивления вращению подшипников качения

Номер патента: 720336
Опубликовано: 05.03.1980
Авторы: Жемайтис, Канапенас, Статкевичюс
МПК: G01M 13/04
Метки: вращению, качения, момента, подшипников, сопротивления
...6, закрепленное на конце вала 1,плоское зеркало 7, светоотражающвя поверхность которого параллельна геометрической оси вала 1 и которое закрепленонв кронштейне 8, установленном в направляющих в радиальном направлении корпусв 3, и автоколлиматор 9, неводвижно установленный на основании 10.Устройство работает следующим образом.Световой пучок, параллельный оси вращения вала 1, из источника. света - авто;ворцо Тираж 1018 аказ 333/16 Ш 1 ИИПИ по дел 113035, МПодписноетета СССРпийя наб., д. 4/5 осу дарственного коми м изобретений и откр осква, ЖРаушск Филиал ПГ 1 П "Патент, г, Ужгород ул. Проектная, 4 коллиматора 9 - посылается в коническое зеркало 6, отражается от него и попадает на плоское зеркало 7, от которого отражается и вновь попадает...
Устройство для измерения момента сопротивления вращению подшипника

Номер патента: 1310667
Опубликовано: 15.05.1987
Авторы: Маринин, Моисеев, Силаев
МПК: G01M 13/04, G01N 19/02
Метки: вращению, момента, подшипника, сопротивления
...лабиринтов 8 от подпипника 4, через который в процессе испытаний прокачивают смазочно-охлаждающую жидкость, подводимую через штуцер 11, механизмы 12 и 13 радиального и осевого,нагружения подшипника 4, моментомер, выполненный в виде 2тензобалки 14, закрепленной на корпусе 1 и взаимодействующей через паз 9со стаканом 5, и датчик 15 частотывращения вала 2. Для тарировки подшипниковой опоры 10 используют приспособление, которое содержит шпиндель 16 с оправкой 17, на которойна подшипниках 18 и 19 установленстакан 5 с коромыслом 20 и грузом 21,подшипниковую опору 1 О, подшипник22, идентичный опоре 10, и втулку 23имитирующую корпус 1,Устройство работает следующим образом.Предварительно определяют моментсопротивления вращению подшипниковойопоры...
Способ контроля подшипников качения по моменту сопротивления вращению

Номер патента: 1702213
Опубликовано: 30.12.1991
Автор: Трофимов
МПК: G01M 13/04
Метки: вращению, качения, моменту, подшипников, сопротивления
...экстремальных значений моментов сопротивления вращению, зафиксированных в цикле измерения. Сигналы с выходов блоков 5 и 6 определения и регистрации через блоки 7 сравнения с предельно допустимыми значениями поступают на соответствующие входы измерителя 8 контролируемых параметров, Ре1702213 Таблица 1 Таблица 2 зультат измерения с выхода блока 8 подается на индикатор 9,Пример определения качества подшипников типа 1000094 по предлагаемому способу. Необходимые значения моментОв сопротивления качению, определенные на описанном устройстве, сведены в табл, 1.Один из блоков 7 сравнения, определяющий предельно допустимые значения по величине среднеарифметического значения момента сопротивления качению, обеспечивает рассортировку подшипников...
Устройство для измерения момента сопротивления вращению подшипника качения

Номер патента: 700799
Опубликовано: 30.11.1979
Авторы: Антонов, Белоусов, Миронович, Сивоконенко
МПК: G01M 13/04
Метки: вращению, качения, момента, подшипника, сопротивления
...сопротивления подшипников, тем самым давая возможно тьулучшить качество приборов и механизмов,где используются подшипники.На чертеже приведена схема предлагаемогоустройства,Устройство для измерения момента сопротивпения вращению подшипника- качения содержит 5смонтированный на основании 1 рабочий вал 2,вращающийся в газостатическом подшипнике 3с опорами для установки исследуемого подшипника 4, заключенного в корпусе 5, соеди.ненный с радиальным 6 и осевым 7 нагружающими механизмамй.На основании 1 также смонтированы задающий механизм 8 и оправка 9, при этом рота.ры датчика угла 10 и датчика моментов 11размещены на валу, а статоры - в оправке, 25вращающейся на шарикоподшипниках 12 относительнооснования 1 при помощи электродвигателя с...
Устройство для измерения момента сопротивления вращению подшипника

Номер патента: 785670
Опубликовано: 07.12.1980
МПК: G01M 13/04
Метки: вращению, момента, подшипника, сопротивления
...Вторая входная ось 14Зо диФФеренциала приводится в колеба785670 2 офамаксз ИФормула изобретения тельное движение вибратором 12 соскоростью ю 1 макс" ф мак.с з " гдето- мгновенная угловая скорость колебаний;Чl ас - максимальная скорость колебаний; й - частота вибрации; а= 2 ййСледовательно, выходная ось 15 дифференциала через механизм крепления и вращения 3 будет приводить одно из колец испытуемого подшипника 4 н движение с частотой вращения где Ж - угловая скорость вращающегосякольца подшипника;а, =щ яра, У=о.Второе кольцо испытуемого под"шипника, нагруженное грузом 5, станет увлекаться в направлении вращения моментом трения, Этот моментизмеряется компенсационной схемойэлектрической пружиной, причем токдатчика момента 1,м,...
Предыдущий патент: Способ оценки качества зацепления зубчатых колес
Следующий патент: Стенд для проведения ускоренных ресурсных испытаний электрических стартеров двигателей внутреннего сгорания
Случайный патент: Устройство для крашения нитевидного жгута