Стенд для испытаний промышленных роботов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
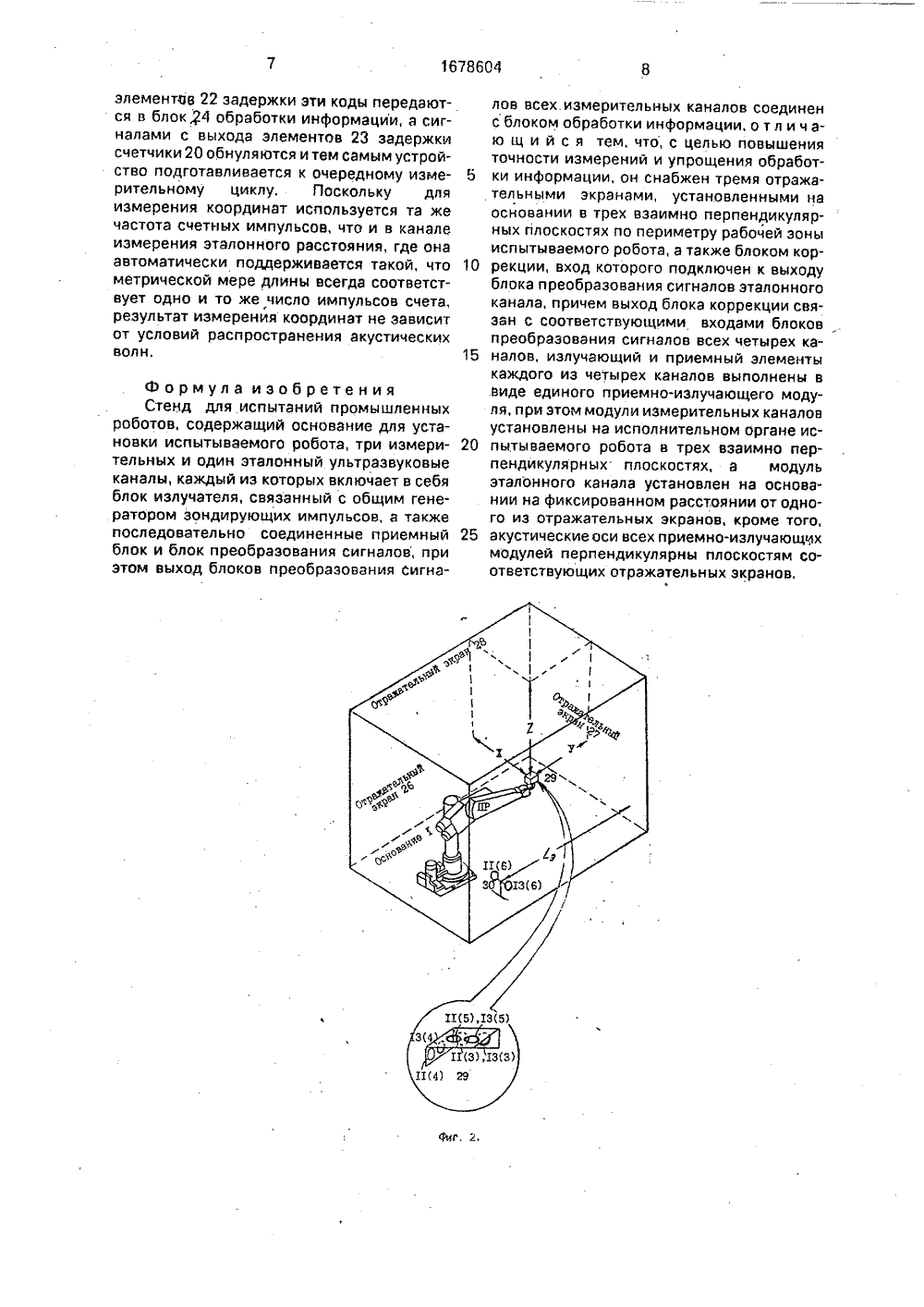
(51)5 В 25 Э 11/00, 19/00 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИ ИЙ ПРОМЫШ(54) СТЕНД ДЛЯ ИСПЫТАЛЕННЫХ РОБОТОВ(57) Изобретение относитсянию и может быть испольпериментальных исследостировании и аттестации к машиностроезовано при эксваниях, диагно- промышленных С 3 К ДВторСК 0 Ю СВИДЕтЕЛЬСт(71) Институт прикладной физики АН БССР(56) Проблемы машиностроения и автоматизации. Москва-Будапешт, В 14, 1987, с.4142,роботов. Цель изобретения - повышение точности измерений и упрощение обработки информации. Устройство содержит генератор 2 зондирующих им пульсов, три цифровых акустических измерительных канала 3 - 5, определяющих расстояния от измерительной головки до трех плоских отражательных экранов, расположенных взаимно ортогонально и образующих один из квадрантов декартовой системы координат, блок 25 автоматической коррекции, обеспечивающий преобразование скорости распространения акустических волн в частоту следования счетных импульсов, соединнный с выходом эталонного канала 6, а также блок 24 обработки информации. 2 ил.10 20 25 30 40 50 Изобретение относится к машиностроению и может быть использовано приэкспериментальных исследованиях, диагностировании и аттестации промышленныхооботов.Целью изобретения является повышение точности измерений и упрощение обработки информации,На фиг,1 приведена структурная электрическая схема испытательного стенда; нафиг.2 - промышленный робот, конструкциятрех отражательных экранов,В качестве отражательных экранов могут использоваться взаимно ортогональныестенки испытательной камеры, обеспечивающие реализацию режима эхолокации иполучение отсчетов в декартовой системекоординат,Стенд для испытаний промышленныхроботов содержит основание 1 для установки исследуемого робота, генератор 2 зондирующих импульсов, измерительные 3 - 5 иэталонный 6 ультразвуковые каналы, каждый иэ которых включает в себя блок 7 излучателя, связанный с общим генераторомзондирующих импульсов и состоящйй изпоследовательно соединенных генератора8 ультразвуковой несущей частоты, модулятора 9, согласующего усилителя 10 и излуча 1 ощего элемента 11, а также приемный блок12, состоящий из последовательно включенных приемного элемента 13, предварительного усилителя 14, фильтра 15 идемодулятора 16, и блок 17 преобразованиясигналов, состоящий из триггера 18, логического элемента И 19, счетчика 20, схемы 21передачи кодов и элементов 22 и 23 задержки, блок 24 обработки информации, блок25 коррекции и отражательные экраны 26 -28, причем выход блоков преобразованиясигналов всех измерительных каналов соединен с блоком обработки информации, авыход блока преобразования сигналов эталонного канала - с входом блока коррекции,выход которого связан с соответствующимивходами блоков преобразования сигналоввсех четырех каналов, отражательные экраны 26 - 28 установлены на основании в трехвзаимо, перпендикулярных плоскостях попериметру рабочей зоны испытываемогоробота, излучающий и приемный элементыкаждого из четырех каналов выполнены в видеединого приемно-излучающего модуля, приэтом модули измерительных каналов собраны в единую конструкцию измерительнуюголовку), в которой они закреплены в трехвзаимно перпендикулярных плоскостях, измерительная головка имеет средства крепления ее на подвижных звеньях робота,модуль эталонного канапэ устанавливается на основании на фиксированном расстоянии от одного из отражательных экранов, кроме того, акустические оси всех приемно- излучающих модулей перпендикулярны плоскостям соответствующих. отражательных экранов,Жесткое основание 1 предназначено для установки исследуемого робота и служит опорой для конструкции из трех отражательных экранов или испытательной камерыв целом. Генератор 2 зондирующих импульсов формирует импульсы запуска ультразвуковых каналов, Он работает в автоколебательном режиме или по уйравляющим командам из блока обработки информацииИзмерительные 3 - 5 и эталонный 6 ультразвуковые каналы являются цифровыми акустическими дальномерами, которые определяют расстояние в воздушной среде на основе измерения времени распространения акустических волн от момента их излучения до момента приема первогоэхо-сигнала. В момент излучения акустического сигнала начинается счет импульсов высокой частоты, а в момент приема прекращается, Число записанных импульсов, пропорциональное измеряемому расстоянию, в виде кода в каждом измерительном цикле передается в блок обработки информации. Каждый иэ дальномеров включает в себя блок 7 излучателя, приемный блок 12 и блок 19 преобразования сигналов.Основными компонентами блока 7 каждого из каналов в случае реализации импульсного способа локации является генератор 8 несущей ультразвуковой. частоты, модулятор 9, преобразующий зондирующий импульс в радиоимпульс ультразвуковой частоты и усилитель 10 с излучающим элементом 11, обеспечивающие формирование короткой ультразвуковой посылки,Приемный блок 12 содержит соответстванно приемный элемент 13, предварительный усилитель 14, фильтр 15, настроенныйна несущую частоту, и демодулятор 16, обеспечивающий формирование короткого импульса останова счета в блоке 17Блок 17 преобразования сигналов выполняет функцию измерителя временных интервалов и содержит триггер 18, формирующий импульс с длительностью, пропорциональной измеряемой дальности,логический элемент И 19, пропускающий импульсы счета в счетчик 20 лишь при наличии разрешающего потенциала на выходе триггера, схему 21 передачи кодов и элементы 22 и 23 задержки, обеспечивающие перезапись кода счетчика в блох обработки информации и последующее обнуление счетчика, 1678604В качестве блока 24 обработки информации используется электронная вычислительная машина, которая на основе измеренных текущих координат положения контрольных точек на подвижных элементах робота по известным алгоритмам определяет его геометрические, статические, кинематические и динамические параметры,Блок 25 коррекции обеспечивает независимость масштаба ультразвуковых измерительных каналов от изменений физических параметров воздуха в рабочем обьеме, Это достигается благодаря.преобразованию .скорости распространения акустических волн в частоту следования счетных импульсов, С этой целью в эталонном канале 6 измеряется фиксированное расстояние, Результат измерения в виде кода циклически передается в блок 25, где сравнивается с эталонным кодом. Образо, ванная эталонным ультразвуковым каналом 6 и блоком 25 система автоматического регулирования на основе сравнения указанных кодов непрерывно так изменяет частоту выходного сигнала блока 25, что измеренному фиксированному расстоянию всегда соответствует один и тот же отсчет дальности, чем обеспечивается постоянство масштаба шкалы всех измерительных дальномеров.Отражательные экраны 26 - 28 выполнены в виде плоскостей, образующих один из квадрантов декартовой системы координат. Они хорошо вписываются в объем испытательной камеры, в которой в процессе испытаний можно изменять климатические условия.Излучающий 11 и приемный 13 элементы всех ультразвуковых каналов выполнены в виде единого приемно-излучающего модуля. Приемно-излучающие модули измерительных каналов 3-5 образуют измерительную головку 29, в которой они закреплены в трех взаимно перпендикулярных плоскостях, Измерительная головка может закрепляться в любой точке на подвижных звеньях робота. Приемно-излучающий модуль 30 эталонного канала расположен на фиксированном расстоянии от одного из отражательных каналов,Стенд для испытаний промышленных роботов работает следующим образом.Устанавливают исследуемый робот в рабочей зоне стенда так, цтобы его контрольные точки при любых позициях робота не выходили за пределы его обьема, охватываемого отражательными экранами 26 - 28. Устанавливают измерительную головку на посадочное место в одной из контрольных точек на подвижных звеньях робота, Вклю 10 15 20 25 30 35 40 45 50 55 чают устройство, Выполняют начальную установку измерительной головки, для чего устанавливают ее в положение, обеспечивающее ортогональность акустических осей трех приемно-излучающих модулей трем отражательным экранам, Поскольку эталонный приемно-излучающий модуль 30 установлен стационарно и его акустическая ось перпендикулярна отражательному экрану 27, то в эталонном канале также устанавливается устойчивая акустическая связь излучающего и приемного элементов через отражатель 27, Устройство готово к измерениям. Так как генератор 2 зондирующих импульсов работает в автоколебательном режиме, блок 6 осуществляет непрерывное зондирование эталонного расстояния, При этом в каждом цикле зондирующий импульс поступает на вход излучающего элемента 11 и на установочный вход триггера 18 блока 6, в сторону отражателя 27 направляется акустическая посылка, а триггер 18 переводится в единичное состояние, разрешая прохождение счетных импульсов с выхода блока 25 на вход счетчика 20 через логический элемент 21, Когда отраженный от отражательного экрана 27 акустический сигнал достигает приемного элемента 13, на выходе блока 12 формируется короткий импульс, возвращающий триггер 18 в исходное состояние и в счетчике 20 фиксируется код измеренного расстояния, который по сигналу с выхода элемента 22 задержки передается в блок 25 коррекции, где сравнивается с кодом, представляющим эталонное расстояние минимальными единицами меры длины. Величина и знак рассогласования кодов используются в блоке 25 для изменения масштаба дальномерной шкалы устройства путем изменения частоты следования счетных импульсов, поступающих с выхода блока в ультразвуковые измерительные каналы,Измерение текущего положения головки 29, установленной на функционирующем роботе, осуществляется следующим образом. Выходным сигналом генератора 2 запускаются излучающие элементы 11 и переводятся в единичное состояние триггера 18 измерительных каналов 3-5. В сторону отражательных экранов 26 - 28 излучаются акустические посылки, а в счетчики 20 через открытые логические элементы И 19 каналов 3 - 5 начинают поступать счетные импульсы с выхода блока 25, Когда отраженные от плоскостей 26-28 сигналы достигают измерител ьной головки, в счетчиках 20 каналов 3 - 5 кратковременно фиксируются коды измеренных координат Х, У и Е соответственно. По сигналам с выходовэлементов 22 задержки эти коды передаются в блок 4 обработки информации, а сигналами с выхода элементов 23 задержки счетчики 20 обнуляются и тем самым устройство подготавливается к очередному измерительному циклу. Поскольку для измерения координат используется та же частота счетных импульсов, что и в канале измерения эталонного расстояния, где она автоматически поддерживается такой, что метрической мере длины всегда соответствует одно и то же число импульсов счета, результат измеренйя координат не зависит от условий распространения акустических волн. Формула изобретения Стенд для испытаний промышленных роботов, содержащий основание для установки испытываемого робота, три измерительных и один эталонный ультразвуковые каналы, каждый иэ которых включает в себя блок излучателя, связанный с общим генератором зондирующих импульсов, а также последовательно соединенные приемный блок и блок преобразования сигналов, при этом выход блоков преобразования сигналов всех. измерительных каналов соединен с блоком обработки информации, о т л и ч аю щ и й с я тем, что, с целью повышения точности измерений и упрощения обработ ки информации, он снабжен тремя отражательными экранами, установленными на основании в трех взаимно перпендикулярных плоскостях по периметру рабочей зоны испытываемого робота, а также блоком кор рекции, вход которого подключен к выходублока преобразования сигналов эталонного канала, причем выход блока коррекции связан с соответствующими входами блоков преобразования сигналов всех четырех ка налов, излучающий и приемный элементыкаждого из четырех каналов выполнены в .виде единого приемно-излучающего модуля, при этом модули измерительных каналов установлены на исполнительном органе ис пытываемого робота в трех взаимно перпендикулярных плоскостях, а модуль эталонного канала установлен на основании на фиксированном расстоянии от одного из отражательных экранов, кроме того, 25 акустические оси всех приемно-излучающихмодулей перпендикулярны плоскостям соответствующих отражательных экранов.
СмотретьЗаявка
4468377, 29.07.1988
ИНСТИТУТ ПРИКЛАДНОЙ ФИЗИКИ АН БССР
ЗЕНИН ВЛАДИМИР ЯКОВЛЕВИЧ, КАРСЕКО ВАСИЛИЙ ГЕННАДЬЕВИЧ
МПК / Метки
МПК: B25J 11/00, B25J 19/00
Метки: испытаний, промышленных, роботов, стенд
Опубликовано: 23.09.1991
Код ссылки
<a href="https://patents.su/4-1678604-stend-dlya-ispytanijj-promyshlennykh-robotov.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для испытаний промышленных роботов</a>
Блок оптической ассоциативной выборки информации для оптического запоминающего устройства

Номер патента: 785896
Опубликовано: 07.12.1980
Автор: Вербовецкий
МПК: G11C 11/42
Метки: ассоциативной, блок, выборки, запоминающего, информации, оптического, оптической, устройства
...световыепучки параллельно оптической оси блокаи состоит, например, из матрицы волоконныхсветоводов или световодной планшайбы,преобразующей световые пучки считываемойинформации в гомоцентрические расходящиеся пучки, оси которых параллельны оптической оси, и линзового растра, преобразующего гомоцентрические пучки в параллельные. Кроме того, этот блок может состоять, например, из голографических элементов и т. д.ьлок оптического суммирования осуществляет сложение разрядов каждого произведения ассоциативного признака слова напризнак опроса и проецирование полученныхсумм на фотоприемный блок 4. В качествеблока 3 при расположении ассоциативныхпризнаков слов и признаков опроса в страницах по строкам может быть использован,например,...
Блок оптической ассоциативной выборки информации (боави) для оптического запоминающего устройства

Номер патента: 799614
Опубликовано: 30.07.1985
Авторы: Вербовецкий, Федоров
МПК: G11C 11/42
Метки: ассоциативной, блок, боави, выборки, запоминающего, информации, оптического, оптической, устройства
...с признаком опроса. вых точек, и светочувствительной среды, на которой совмещаются растр точек от этого источника и растр световых точек вспомогательной информации, поступающий со светообъединяющего элемента 6 и блокирующий в исходном состоянии растр дополнительного источника, при отсутствии, например, какой-либо световой точки во вспомогательном растре на выход БОИ проходит сигнал от первого дополнительного источника излучения.Блок оптического согласования 8, обеспечивающий на своем выходе параллельность осей плоско в гомоцентрических (в ортогональных плоскостях) пучковоптической оси устройства, второй проекционный цилиндрический блок 9, светоделительный элемент 10, например поляризационный светоделительный куб или полупрозрачное...
Блок оптической ассоциативной выборки информации для оптического запоминающего устройства

Номер патента: 814132
Опубликовано: 30.07.1983
Автор: Вербовецкий
МПК: G11C 11/42
Метки: ассоциативной, блок, выборки, запоминающего, информации, оптического, оптической, устройства
...ОЗУ 1.В режиме ассоциативной выборкиинформации БОАВИ работает следующимобразом.Ио команде БУ 7 на выходе ОЗУ 1появляется световое распределение,соответствующее оптическим произведениям признаков опроса на ассоциативные признаки, например, страниц информации (или слов, Ьлоков слов ),или оптическим суммам разрядов этихпроизведений, а также оптическим произведениям опорных двоичных единиц 40(массивов опорных двоичных единиц )или оптическим суммам этих произведений,Световой сигнал с ОЗУ 1 поступает на вход блока 2 фокусировки луча, ко-,45 торый создает на своем выходе растр . световых точек, каждая из которых соответствует сумме разрядов вспомо-гательной информации, представленной в одной странице. Под вспомогательной информацией здесь и...
Устройство для регистрации импульсных помех в каналах передачи дискретной информации

Номер патента: 234445
Опубликовано: 01.01.1969
МПК: H04B 1/10, H04L 12/26
Метки: дискретной, импульсных, информации, каналах, передачи, помех, регистрации
...бод при ДО ства для регистрации имканалах передачи дискретодержащие входной усилифильтр, амплитудный сегистрации импульсных поустройство позволяет пость регистрации помех. Для полосовой фильтр, настрополосу канала, включен и амплитудным селектором. 10 едена блок-схема устройствсстны устроисных помех винформации, сконтрольныйор и схему, реПредлокенноеть эффективноконтрольныйй на крайнююу усилителемчертеже прин анного мирует хемы 7 тени Устроиство для регистрации импульсных помех в каналах передачи дискретной информации, содержащее входной усилитель, контрольный фильтр, амплитудный селектор и схему регистрации импульсных помех, отличающееся тем, что, с целью повышения эффективности регистрации импульсных помех, между входным усилителем и...
Устройство для измерения времени задержки импульсов в разночастотных каналах

Номер патента: 1495741
Опубликовано: 23.07.1989
МПК: G04F 10/04
Метки: времени, задержки, импульсов, каналах, разночастотных
...к третьему и четвертому входам блока 18 измерения разности периодов импульсных последовательностей. Второй выход блока 4 задержкиимпульсов подключен к второму входублока 5 стробирования импульсов, выход элемента ИЛИ 14 - к второму входу элемента И 13, выходом подключен(ного к второму входу элемента ИЛИ 2. Первый выход блока 4 задержки импульсов подключен к входу блока 5 задержки импульсов, выход которого через прерыватель 16 соединен с ниной17 для подключения исследуемого тра.кта. Второй вход прерывателя 16 подключен к выходу триггера 6, третий вход .блока 5 стробирования импульсов подключен к нине 22 питания.Предложенное устройство работает следующим образом.Импульс генератора 1 устанавливает исходное состояние счетчика 7,...
Предыдущий патент: Способ реконфигурации многоподвижного звена манипулятора
Следующий патент: Захват
Случайный патент: Тангенциальная резьбонакатная головка