Система адаптивного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
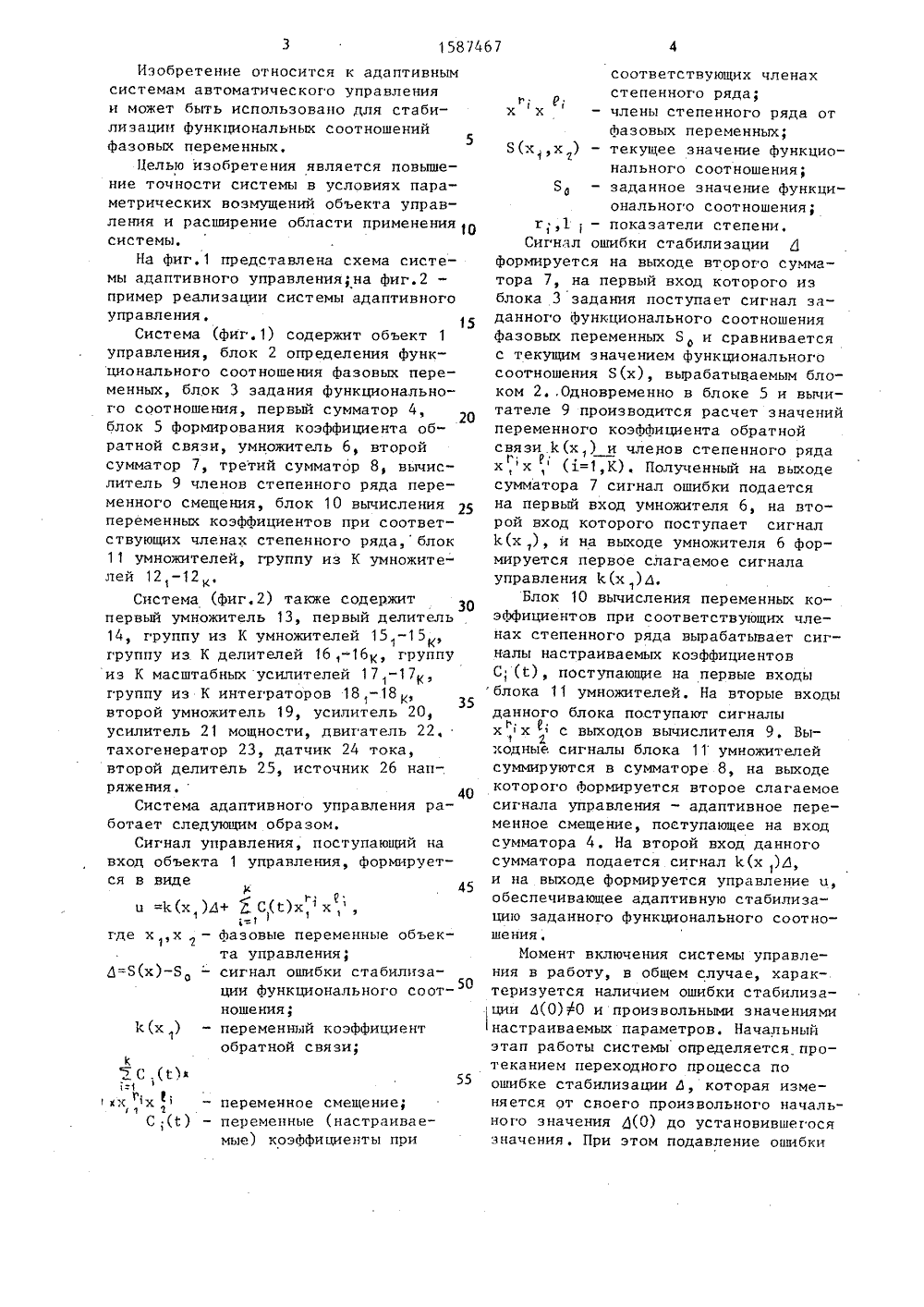
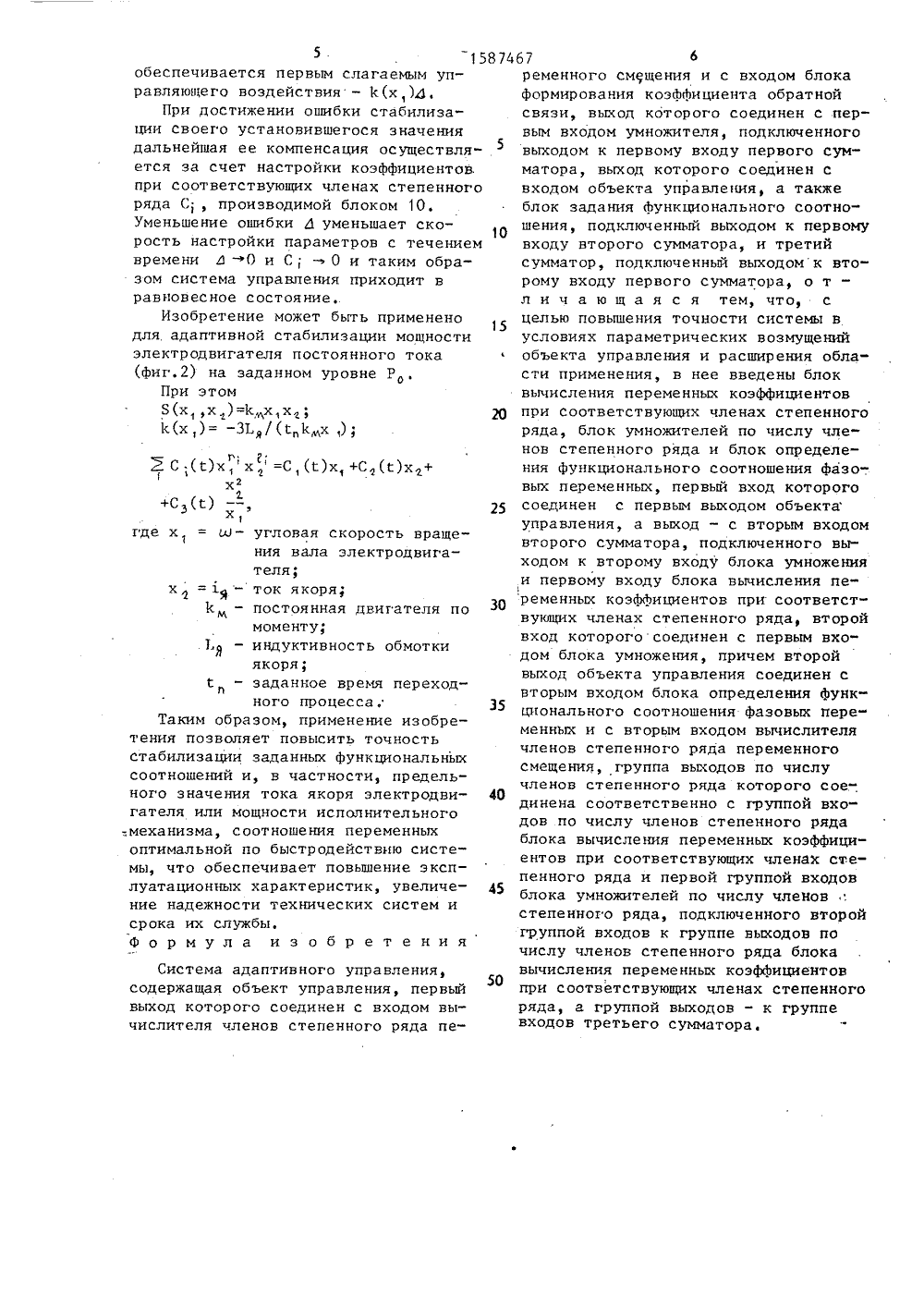
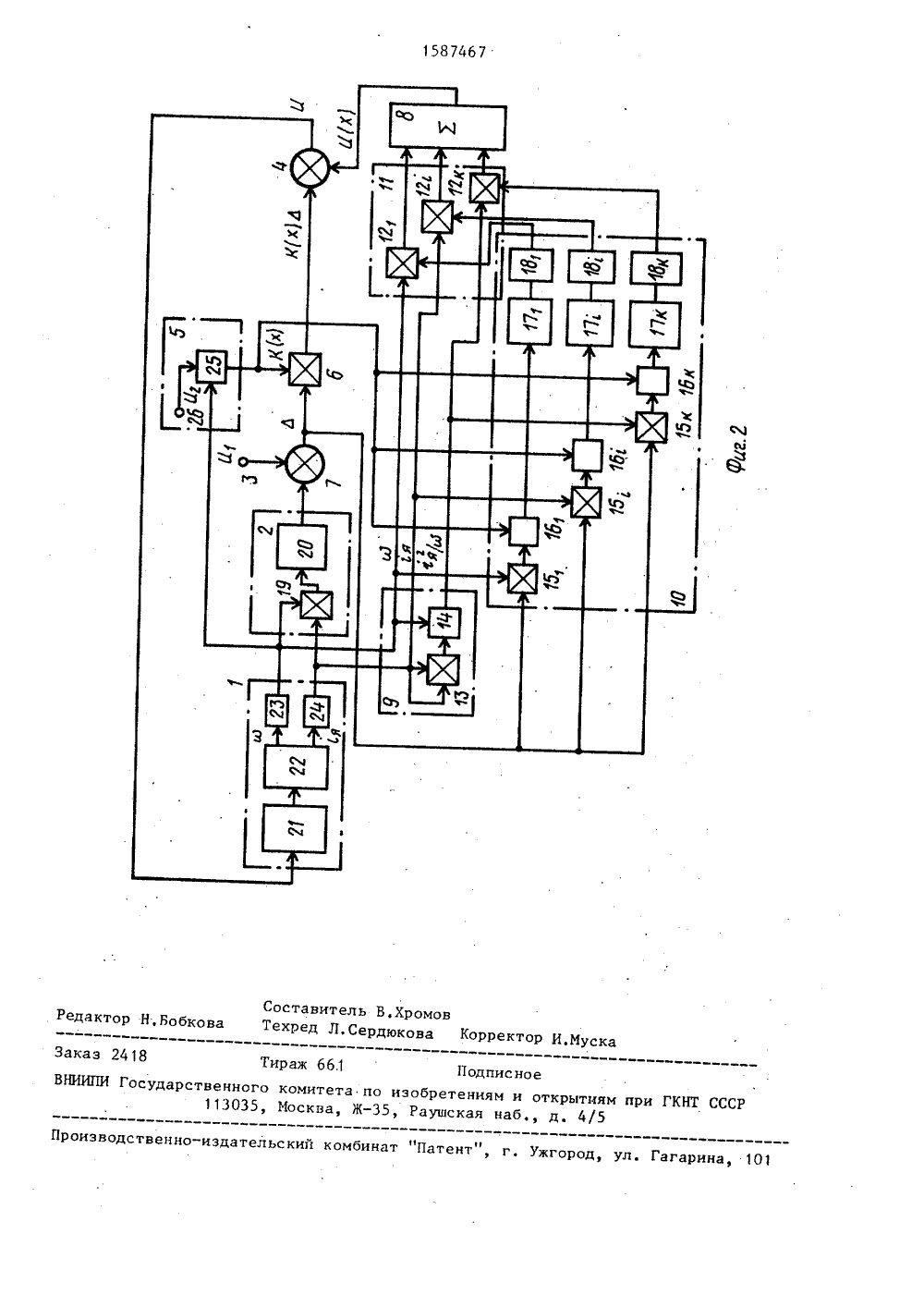
(19) (11) 7 5 В 13/02 51) ИСАНИЕ ИЗОБРЕТЕНИЯ ЕЛЬСТВУ очной оров ьство СССР /06, 1984, тво СССР/06, 1984,(54) СИСТЕМА АДАПТИВ (57) Изобретение отн ным системам автомат ния . Целью изобретени шение точности систе ОГО УПРАВЛЕ сится к адаптивческого управлея является повыы в условиях Сд ОО ГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И 01 НРЫТИЯМПРИ П(НТ СССР К АВТОРСКОМУ СВИ(56) Авторское свидетелУ 1270854, кл. Н 02 Р 5Авторское свидетельсУ 1228207, кл, Н 02 Р 5 2параметрических возмущении объектауправления и расширение области применения системы, Система содержитобъект управления 1, блок 2 определения функционального соотношения фазовых переменных, блок 3 задания функционального соотношения, первый сумматор 4, блок 5 формирования коэффициента обратной связи, первый умножитель 6, второй сумматор 7, третийсумматор 8, вычислитель 9 членов степенного ряда переменного смещения,блок 10 вычисления переменных коэффициентов при соответствующих членахстепенного ряда, блок 11 умножителей,группу из К вторых умножителей 12.2 ил, 1587467=кх хС;(Е) 55 переменное смещение;переменные (настраиваемые) коэффициенты при Изобретение относится к адаптивнымсистемам автоматического управленияи может быть использовано для стабилизации функциональных соотношений5фазовых переменных.Целью изобретения является повышение точности системы в условиях параметрических возмущений объекта управления и расширение области применения 1 Осистемы.На фиг.1 представлена схема системы адаптивного управления;на фиг.2пример реализации системы адаптивногоуправления. 15Система (фиг.1) содержит объект 1управления, блок 2 определения функционального соотношения фазовых переменных, блок 3 задания функционального соотношения, первый сумматор 4,блок 5 формирования коэффициента обратной связи, умножитель б, второйсумматор 7, третий сумматор 8, вычислитель 9 членов степенного ряда переменного смещения, блок 10 вычисленияпеременных коэффициентов при соответствующих членах степенного ряда, блок11 умножителей, группу из К умножителей 12, - 12Система (фиг,2) также содержитпервый умножитель 13, первый делитель14, группу из К умножителей 15-15группу из К делителей 16,-16 к, группуиз К масштабных усилителей 171-171группу из К интетратовторой умножитель 19, усилитель 20,усилитель 21 мощности, двиатель 22,тахогенератор 23, датчик 24 тока,второй делитель 25, источник 26 напряжения,40Система адаптивного управления работает следующим образом.Сигнал управления, поступающий навход объекта 1 управления, формируется в видеК 45ы =1 с(х,)Д+, Сх, хгде х 1,х 2 - Фазовые переменные объекта управления;Д=Б(х)-Б - сигнал ошибки стабилизао50ции Функционального соотношения;1(х ) - переменный коэффициент1обратной связи; соответствующих членахстепенного ряда;Р;х х - члены степенного ряда отФазовых переменных;Б(х.,х ) - текущее значение функционального соотношения;Б - заданное значение функционального соотношения;г;,1; - показатели степени,Сигнал ошибки стабилизации Дформируется на выходе второго сумматора 7, на первый вход которого изблока 3 задания поступает сигнал заданного функционального соотношенияфазовых переменных Б и сравниваетсяс текущим значением функциональногосоотношения Б(х), вырабатываемым блоком 2.,Одновременно в блоке 5 и вычитателе 9 производится расчет значенийпеременного коэффициента обратнойсвязи.к(х,) и членов степенного рядах,х, (=1,К). Полученный на выходе, Р;сумматора 7 сигнал ошибки подаетсяна первый вход умножителя б, на второй вход которого поступает сигналЕ(х,), и на выходе умножителя б формируется первое слагаемое сигналауправления 1 с (х ) й,Блок 10 вычисления переменных коэффициентов при соответствующих членах степенного ряда вырабатывает сигналы настраиваемых коэффициентовС;(С), поступающие на первые входыблока 11 умножителей. На вторые входыданного блока поступают сигналых хс выходов вычислителя 9, Вы 2ходные сигналы блока 11 умножителейсуммируются в сумматоре 8, на выходекоторого формируется второе слагаемоесигнала управления - адаптивное переменное смещение, поступающее на входсумматора 4, На второй вход данногосумматора подается сигнал Е(х,)Д,и на выходе формируется управление ы,обеспечивающее адаптивную стабилизацию заданного функционального соотношения.Момент включения системы управления в работу, в общем случае, характеризуется наличием ошибки стабилизации й(0)ФО и произвольными значенияминастраиваемых параметров. Начальныйэтап работы системы определяется протеканием переходного процесса поошибке стабилизации й, которая изменяется от своего произвольного начального значения Д(0) до установившегосязначения, При этом подавление ошибки5 15обеспечивается первым слагаемым управляющего воздействия - 1 с(х,)й,При достижении ошибки стабилизации своего установившегося значениядальнейшая ее компенсация осуществля"ется за счет настройки коэффициентов.при соответствующих членах степенногоряда С;, производимой блоком 10.Уменьшение ошибки Д уменьшает скорость настройки параметров с течениемвремени Л -фО и С; - 0 и таким образом система управления приходит вравновесное состояние,.Изобретение может быть примененодля адаптивной стабилизации мощностиэлектродвигателя постоянного тока(фиг.2) на заданном уровне Р,При этомБ(хх )=1 с,рх;К(х,) = -Зт /(К,х,);+С (Т)хгде х = ьо- угловая скорость вращения вала электродвигателя;х= 11 - ток якоряЕщ - постоянная двигателя помоменту;1,Я - индуктивность обмоткиякоря;- заданное время переходлного процесса.Таким образом, применение изобретения позволяет повысить точность стабилизации заданных функциональных соотношений и, в частности, предельного значения тока якоря электродвигателя или мощности исполнительного -,механизма, соотношения переменных оптимальной по быстродействию системы, что обеспечивает повышение эксплуатационных характеристик, увеличение надежности технических систем и срока их службы,Формула изобретенияСистема адаптивного управления, содержащая объект управления, первый выход которого соединен с входом вычислителя членов степенного ряда пе 87467 б 5 10 15 4 20254050 ременного смещения и с входом блока формирования коэффициента обратной связи, выход которого соединен с первым входом умножителя, подключенного выходом к первому входу первого сумматора, выход которого соединен с входом объекта управления, а также блок задания функционального соотно" щения, подключенный выходом к первому входу второго сумматора, и третий сумматор, подключенный выходом к второму входу первого сумматора, о т л и ч а ю щ а я с я тем, что, с целью повышения точности системы в условиях параметрических возмущений объекта управления и расширения области применения, в нее введены блок вычисления переменных коэффициентов при соответствующих членах степенного ряда, блок умножителей по числу членов степенного ряда и блок определения функционального соотношения фазо-. вых переменных, первый вход которого соединен с первым выходом объекта управления, а выход - с вторым входом второго сумматора, подключенного выходом к второму входу блока умноженияи первому входу блока вычисления переменных коэффициентов при соответствующих членах степенного ряда, второйвход которого соединен с первым входом блока умножения, причем второйвыход объекта управления соединен с вторым входом блока определения функционального соотношения фазовых переменных и с вторым входом вычислителя членов степенного ряда переменного смещения, группа выходов по числу членов степенного ряда которого сое-, динена соответственно с группой входов по числу членов степенного ряда блока вычисления переменных коэффициентов при соответствующих членах степенного ряда и первой группой входов блока умножителей по числу членов степенного ряда, подключенного второй группой входов к группе выходов по числу членов степенного ряда блока вычисления переменных коэффициентов при соответствующих членах степенного ряда, а группой выходов - к группевходов третьего сумматора.1587467 Составитель В.ХромовРе актодактор Н,Бобкова Техред Л.Сердюкова Корректор И.Муск ираж 6 одпи Производственно-издательский комбинат "Патент", г. Ужго ул. Гагарина, 101 Заказ 2418ВНИИПИ Госу рственного комитета по 113035, Москва, Жэобретениям и открытиям при ГКНТ СССРРаушская наб., д. 4/5
СмотретьЗаявка
4412456, 18.04.1988
ЛЕНИНГРАДСКИЙ ИНСТИТУТ ТОЧНОЙ МЕХАНИКИ И ОПТИКИ
МИРОШНИК ИЛЬЯ ВАСИЛЬЕВИЧ, НИКИФОРОВ ВЛАДИМИР ОЛЕГОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: адаптивного
Опубликовано: 23.08.1990
Код ссылки
<a href="https://patents.su/4-1587467-sistema-adaptivnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система адаптивного управления</a>
Выходной узел тестера для функционального контроля логических блоков

Номер патента: 1749857
Опубликовано: 23.07.1992
Авторы: Дерендяев, Кибзун, Маслов
МПК: G01R 31/28, G01R 31/318
Метки: блоков, выходной, логических, тестера, узел, функционального
...об исправном входе ОК. При наличии неисправности на входе ОК (замыкание на шины питания или соседние выводы, неверно установленные микросхемы или элементы) на выходе элемента сравнения 34 будет присутствовать лог, "0", которая по сигналу синхронизации нэ шине 3 запишется в триггер 39, в результате чего на шине 41 сформируется лог, "1", а на шине 42 - лог, "0", что будет соответствовать неисправному состоянию входа ОК, Уровень лог, "0" с выхода элемента И 38 заблокирует элемент И 37, в результате чего разомкнется клюц 26 и преобразователь 31 отключится от неисправного входа ОК.Если по какой-то причине контроль входа ОК не нужен, то в этом случае по шине 10 подается уровень лог, "Г, тем самым блокируется элемент И 36 и запись...
Устройство для контроля блоков переменных коэффициентов

Номер патента: 384106
Опубликовано: 01.01.1973
Автор: Авторы
МПК: G06G 7/02
Метки: блоков, коэффициентов, переменных
...коэффициент передачи которого равен линейной комбинации коэффициентов передачи контролируемых блоков. При этом взвешенная сумма выходных напряжений всех авиационного приборостроения блоков, получаемая на сумматоре, должнабыть равна нулго, что и используется дляконтроля.Структурная схема устройства для контроля блоков переменных коэффициентовизображена на чертеже,Оно содержит контролируемые. блоки 1 ь1, переменных коэффициентов, дополнительный блок 2 переменного коэффициента,1 О сумматор д, ггереклгочатель 4 и источник .этестового напряжения.Входы сумматора 3 соединены с выходамиконтролируемых блоков 1 , 1 и дополнительного блока 2.15 Схема работает следующим образом.На входы всех блоков переменных коэффициентов (контролируемых и...
Устройство для функционального контроля цифровых блоков

Номер патента: 1196875
Опубликовано: 07.12.1985
Авторы: Домакеев, Иванов, Майоров, Нечушкин, Ротнов, Саморуков
МПК: G06F 11/16
Метки: блоков, функционального, цифровых
...блоке 2 памяти,Коммутатор (фиг. 4) содержит узлы 34 коммутации по числу выводов проверяемого узла, входы управляющей 15 группы 35, информационные выходы первой группы 36, информационные входы первой группы 37, информационные выходы второй группы 38, информационные входы второй группы 39. 20 мации и выдачи сигналов управления в блоки 1-3 и 6. Блок 6 вывода служит для печати результатов контроля,Устройство работает следующим образом.По команде блока 5 управления от блока 1 ввода в блок 5 поступает информация, устанавливающая режим работы устройства "Запись". В этом режиме в субблоки 8 записываются тестовые наборы, в субблоки 9 (подключение к входам проверяемого блока 7) записываются стимулы, а субблоки 9, подключенные к выходам...
Блок переменных резисторов

Номер патента: 1471226
Опубликовано: 07.04.1989
Автор: Нсанбаев
МПК: H01C 10/20
Метки: блок, переменных, резисторов
...подложки 7 и снабжена токоот водами 8, 9 и 10, 11.Обе диэлектрические подножки скреплены корпусом 12, выполненным в виде ободка и снабженным выступами 13 для скрепления подложек 1 и 7 с кор пусом 12, Ось 14, выполняющая роль ручки для вращения ползуна 15, установлена в отверстии выступа 2, Стопорные кольца 16-18 фиксируют как ось 14 от аксиальных смещений, так и,ползун 15, который выполнен в виде диэлектрического основания ромбовидной формы. С обеих сторон ползуна 15 располоО жены дугообразные токосъемные элементы 19, 20 и 21, 22, расположенные с возможностью упругого взаимодействия с соответствующими дугообразными резистивными элементами, и контактные элементы 23-26, перемычки (не показаны) соединяют соответствующие дуго" образные...
Устройство для функционального контроля цифровых блоков

Номер патента: 1656538
Опубликовано: 15.06.1991
Авторы: Барышев, Ваганов, Дерендяев, Кибзун, Лисицын, Маслов, Мельников
МПК: G06F 11/16
Метки: блоков, функционального, цифровых
...5 это слово запишется в ОЗУ 10 субблока 21 по очередному адресу и т.д, Запись информации в субблок 21 блока 2 буферной памяти продолжается до тех пор, пока состояние счетчика 20 тест-наборов не станет равно содержимому регистра 23, В случае равенства нэ выходе схемы 21 сравнения блока 5 появится импульс, который запретит работу генератора 22 и установит счетчик 20, регистр 25 и регистр 23 в нулевое состояние. Далее в регистр 25 от блока 1 заносится адрес очередного канала, а в регистр 23 - номер последнего загружаемого тестового слова в субблок блока 2 выбранного какала. Загрузка очередного субблока блока 2 происходит аналогично предыдущему и т.д., пока не загрузятся все необходимые для данного ОК субблоки блока 2 буферной памяти,...
Предыдущий патент: Регулятор с размытой логикой
Следующий патент: Система технической диагностики динамических объектов
Случайный патент: Машина для шлифования деталей низа обуви