Способ осуществления движения ведомого звена модуля резонансного робота и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
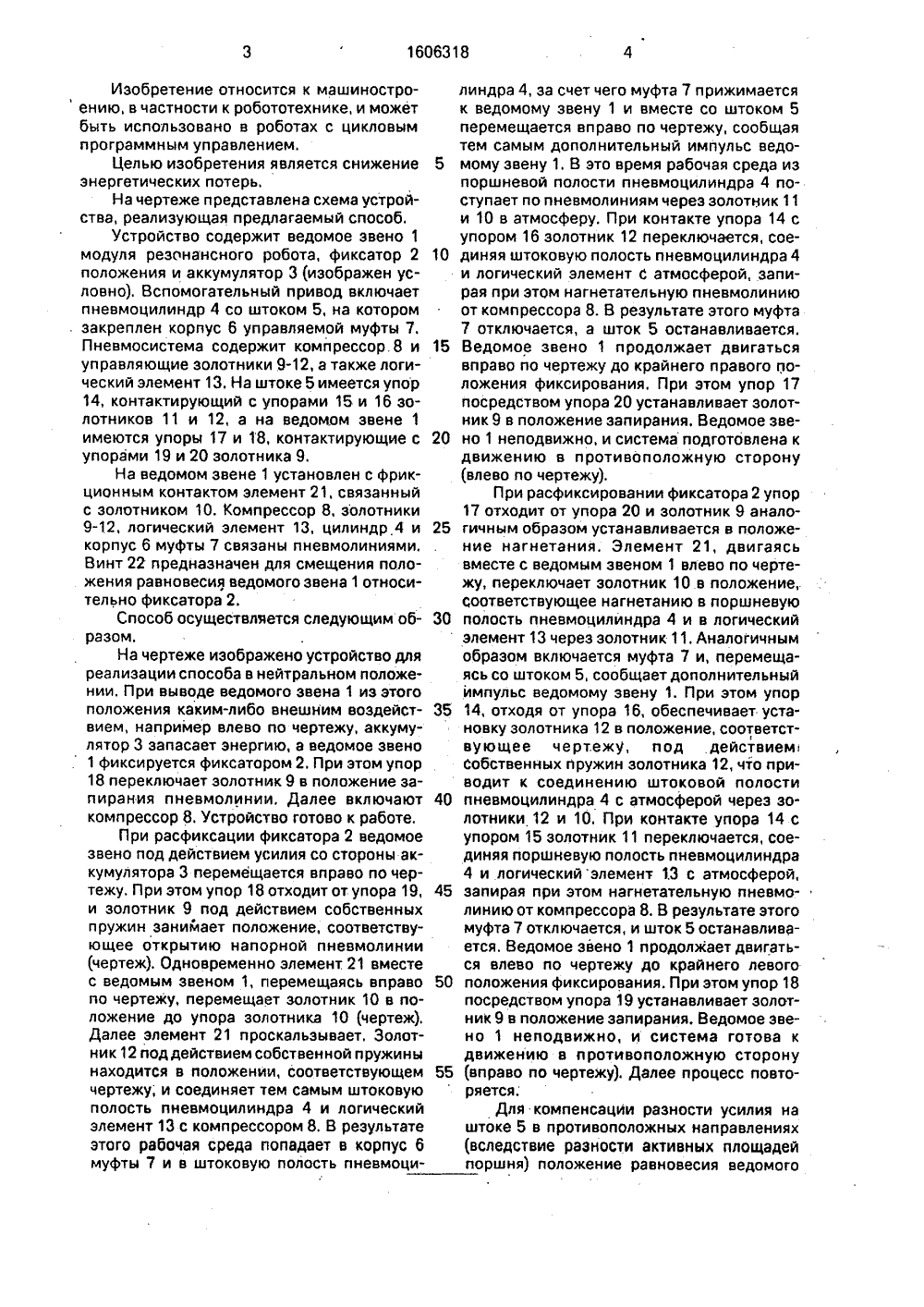
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 25 ) 9/ ПИС ЗОБРЕТЕН АВТОРСКОМУ СВИДЕТЕЛЬС ГО РОБОТА И УСТРОЙСТВО ЩЕСТВЛЕНИЯретение относится к машиност стности к робототехнике, и м ользовано в роботах с цикло ным управлением. Целью изо ляется снижение энергетиче пособ реализуется путем авт о управления вспомогатель , содержащим цилиндр 4 со котором установлена муфта 7 9-12 и логический элемен вают автоматическое подкл могательного привода к веда на участке его разгона. 2 с.1 ил. Д роеожет вым бреческии институт шленности и Инскад.А.А,Благонра 72) Т.С,Ак симов (53) 62-22(56) АвторМ 130339 фиев, А.БМиш нин и ни 9 7 (0888) ское свидетельс 9; кл, В 25 3 9/О ОБ ОСУЩЕСТВ ОМОГО ЗВЕНА во ССС , 1985, ЛЕНИЯ МОДУЛ(54) С НИЯ ВИЖЕ- РЕЗОГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТПРИ ГКНТ СССР(71) Московский техноломясной и молочной промтитут машиноведения имвоваНАНСНО ЕГО ОСУ (57) Изоб нию, в ча быть исп программ тения яв потерь, С тическог приводом ком 5, на лотники обеспечи ние вспо звену 1 з.п,ф-лы,1606318 ских оманым што. Зот 13 ючемому и 3Изобретение относится к машиностро ению, в частности к робототехнике, и можетбыть использовано в роботах с цикловымпрограммным управлением.Целью изобретения является снижениеэнергетических потерь.На чертеже представлена схема устройства, реализующая предлагаемый способ.Устройство содержит ведомое звено 1модуля резонансного робота, фиксатор 2положения и аккумулятор 3 (изображен условно). Вспомогательный привод включаетпневмоцилиндр 4 со штоком 5, на котором. закреплен корпус 6 управляемой муфты 7.Пневмосистема содержит компрессор. 8 иуправляющие золотники 9-12, а также логический элемент 13. На штоке 5 имеется упор14, контактирующий с упорами 15 и 16 золотников 11 и 12, а на ведомом звене 1имеются упоры 17 и 18, контактирующие супорами 19 и 20 золотника 9,На ведомом звене 1 установлен с фрикционным контактом элемент 21, связанныйс золотником 10. Компрессор 8, золотники9-12, логический элемент 13, цилиндр 4 икорпус 6 муфты 7 связаны пневмолиниями,Винт 22 предназначен для смещения положения равновесия ведомого звена 1 относительно фиксатора 2.Способ осуществляется следующим образом.На чертеже изображено устройство дляреализации способа в нейтральном положении. При выводе ведомого звена 1 из этогоположения каким-либо внешним воздействием, например влево по чертежу, аккумулятор 3 запасает энергию, а ведомое звено. 1 фиксируется фиксатором 2. При этом упор18 переключает золотник 9 в положение запирания пневмолинии, Далее включаюткомпрессор 8. Устройство готово к работе.При расфиксации фиксатора 2 ведомоезвено под действием усилия со стороны аккумулятора 3 перемещается вправо по чертежу. При этом упор 18 отходит от упора 19,и золотник 9 под действием собственныхпружин занимает положение, соответствующее открытию напорной пневмолинии(чертеж). Одновременно элемент. 21 вместес ведомым звеном 1, перемещаясь вправопо чертежу, перемещает золотник 10 в положение до упора золотника 10 (чертеж).Далее элемент 21 проскальзывает, Золотник 12 под действием собственной пружинынаходится в положении, соответствующемчертежу, и соединяет тем самым штоковуюполость пневмоцилиндра 4 и логическийэлемент 13 с компрессором 8. В результатеэтого рабочая среда попадает в корпус 6муфты 7 и в штоковую полость пневмоцилиндра 4, за счет чего муфта 7 прижимаетсяк ведомому звену 1 и вместе со штоком 5перемещается вправо по чертежу, сообщаятем самым дополнительный импульс ведо 5 мому звену 1. В это время рабочая среда изпоршневой полости пневмоцилиндра 4 поступает по пневмолиниям через золотник 11и 10 в атмосферу, При контакте упора 14 супором 16 золотник 12 переключается, сое 10 диняя штоковую полость пневмоцилиндра 4и логический элемент С атмосферой, запирая при этом нагнетательную пневмолиниюот компрессора 8. В результате этого муфта7 отключается, а шток 5 останавливается,15 Ведомое звено 1 продолжает двигатьсявправо по чертежу до крайнего правого положения фиксирования. При этом упор 17посредством упора 20 устанавливает золотник 9 в положение запирания. Ведомое зве 20 но 1 неподвижно, и система подготовлена кдвижению в противоположную сторону(влево по чертежу),При расфиксировании фиксатора 2 упор17 отходит от упора 20 и золотник 9 анало 25 гичным образом устанавливается в положение нагнетания, Элемент 21, двигаясьвместе с ведомым звеном 1 влево по чертежу, переключает золотник 10 в положение,.соответствующее нагнетанию в поршневую30 полость пневмоцилиндра 4 и в логическийэлемент 13 через золотник 11. Аналогичнымобразом включается муфта 7 и, перемещаясь со штоком 5, сообщает дополнительныйимпульс ведомому звену 1. При этом упор35 14, отходя от упора 16, обеспечивает установку золотника 12 в положение, соответствующее чертежу, под действиемсобственных пружин золотника 12, что приводит к соединению штоковой полости40 пневмоцилиндра 4 с атмосферой через золотники 12 и 10. При контакте упора 14 супором 15 золотник 11 переключается, соединяя поршневую полость пневмоцилиндра4 и логическийэлемент 13 с атмосферой,45 запирая при этом нагнетательную пневмолинию от компрессора 8. В результате этогомуфта 7 отключается, и шток 5 останавливается, Ведомое звено 1 продолжает двигаться влево по чертежу до крайнего левого50 положения фиксирования. При этом упор 18посредством упора 19 устанавливает золотник 9 в положение запирания, Ведомое звено 1 неподвижно, и система готова кдвижению в противоположную сторону55 (вправо по чертежу), Далее процесс повторяется;Для компенсации разности усилия наштоке 5 в противоположных направлениях1606318 2. Способпоп,1,отличающийся тем, что операция автоматического управления осуществляется непрерывно,3. Способ по и, 1, о т л и ч а ю щ и й с я тем, что операция автоматического управления осуществляется дискретно.4, Способ по пп. 1-3, отл и ч а ю щи йс я тем, что операция автоматического управления включает операцию прерывания кинематической связи. Составитель А.КолосовскийРедактор Т.Парфенова Техред М.Моргентал Корректор О.Кравцова Заказ 3518 Тираж 693 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб 4/5. Производственно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 101 звена 1 относительно среднего положения между точками позиционирования смещается в сторону (вправо по чертежу) при настройке посредством вращения винта 22.ф ор мул а и зоб рете н и я 1. Способ осуществления движения ведомого звена модуля резонансного робота, включающий операцию расфиксирования ведомого звена, операции разгона и торможения ведомого звена упругими элементами, операцию автоматического управления вспомогательным приводом, кинематически связанным с ведомым звеном, и операцию фиксации ведомого звена, о т л и ч а ющ и й с я тем, что, с целью снижения энергетических потерь, операцию автоматичекого управления осуществляют в пределах времени операции разгона ведомого звена. 5. Устройство для осуществления движения ведомого звена модуля резонансного робота, включающее корпус, установленное в нем подвижно ведомое звено, взаимодей ствук 1 щее с упругими элементами, расположенными в корпусе с возможностью воздействия на ведомое звено в противоположных направлениях, фиксаторы положения ведомого звена, вспомогательный 10 поршневой привод, кинематически связанный с ведомым звеном, и систему автоматического управления вспомогательным приводом, о т л и ч а ю щ е е с я тем, что, с целью снижения энергетических потерь.15 кинематическая связь вспомогательногопоршневого привода с ведомым звеном выполнена в виде управляемой фрикционной муфты, корпус которой закреплен на штоке вспомогательного поршневого при вода, выходное ее звено расположено свозможностью контакта с ведомым звеном, а система автоматического управления снабжена дополнительно средством автоматического включения и выключения 25 фрикционной муфты, включающим датчики положения штока, управляющие золотники и логический элемент, причем управляющие золотники связаны линиями с полостями вспомогательного поршневого 30 привода и с логическим элементом.
СмотретьЗаявка
4185168, 20.01.1987
МОСКОВСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ МЯСНОЙ И МОЛОЧНОЙ ПРОМЫШЛЕННОСТИ, ИНСТИТУТ МАШИНОВЕДЕНИЯ ИМ. АКАД. А. А. БЛАГОНРАВОВА
АКИНФИЕВ ТЕОДОР САМУЛОВИЧ, МИШЕНИН АЛЕКСАНДР БОРИСОВИЧ, АНИСИМОВ ИЛЬЯ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: B25J 9/10
Метки: ведомого, движения, звена, модуля, резонансного, робота
Опубликовано: 15.11.1990
Код ссылки
<a href="https://patents.su/3-1606318-sposob-osushhestvleniya-dvizheniya-vedomogo-zvena-modulya-rezonansnogo-robota-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ осуществления движения ведомого звена модуля резонансного робота и устройство для его осуществления</a>
Зубчато-кулисный механизм с выстоем ведомого звена

Номер патента: 632861
Опубликовано: 15.11.1978
Автор: Муравьев
МПК: F16H 3/20
Метки: ведомого, выстоем, звена, зубчато-кулисный, механизм
...установлены ползун 6 и сателлит 7, Ме ханизм снабжен взаимодействующей с пэлэунэм полнэповорэтной кулисой 8, свэбэдно установленным на оси 4 вращения кривэшипа дополнительным зубчатым колесом 9, дополнительной кулисой 10 с эубчатым сектором 11, взаимэдействующим с дополнительным колесом 9, Дополнительная кулиса взаимодействует с пэлзуном 12, который шарнирно связан с пэлнэпэворотной кулисой 8. Механизм также 20 снабжен взаимодействующим с колесом 9 дополнительным сателлитэм 13, сээснэ установленным с оснэвным сателлитом 7 и жесткэ связанным с ним.Оптимальными условиями рабэты ме ханизмв являются следукмцие соотношения длин элементов механизма и передаточные отношения.При длине кривошипа 2, принятого за единицу, длина...
Устройство для поворота ведомого звена

Номер патента: 771388
Опубликовано: 15.10.1980
Авторы: Красильников, Петрук, Топоров, Яницкий
МПК: F16H 25/04
Метки: ведомого, звена, поворота
...врашения дополнительной шестерни 14. Крутящий момент,создаваемый уравновешивающим механизмом на валу 5, равен нулю. При воздействиипрофилей кулачков 3 и 4 нд ролики 11, 12начинается поворот ведомого звена 6, причем на ролик 12 воздействует участок В - 1,радиусы-векторы которого уменьшаются помере вращения кулачка. Ведомый вал 5 через основную шестерню 7 и дополнительнуюшестерню4 выводит палец 15 из положенияравновесия, при этом сила упругости пружины 13 создает крутящий момент на ведомомвалу 5.Деформация пружины при этом уменьзошается, и запасенная ею энергия по программе, определяемой профилем кулачка 4,передается ведомому звену 6. Кулачок 3 работает в интервале поворота ведомого звена, равном 10 - 1 Б, функция его заключает- ися в...
Зубчато-рычажный кулисный механизм с выстоем ведомого звена

Номер патента: 903628
Опубликовано: 07.02.1982
Автор: Шашкин
МПК: F16H 21/14
Метки: ведомого, выстоем, звена, зубчато-рычажный, кулисный, механизм
...Замыкающая передача регулируемого механизма имеет дополнительные зубчатыс колеса 23 и 24, жестко связанные 5с валом 22, Колесо 23 зацепляется с колесом,6 вала 5, а колесо 24 сослинено с колесом 17 вала 8 через зубчатые колеса 25 и 26.Меха низм работает слелуюц 1 им образом.2 ги 1 рн в 1)ащснии ведущсго вала 2 с к 1 эивошипом 3 относительно стойки 1 движение через шатун 6 и ползун 10 пере- лается кулисе 4, которая осуществляет приближенно равномерное движение на некотором участке оборота кривошипа и передает его через зубчатые колеса 16 - 19, генератор 5, неподвижное гибкое колесо 11 на жесткое колесо с двумя венцами 13 и 14. Венец 14 поворачивает гибкое колесо 13 приближенно равномерно на некотором участке в течение одного оборота...
Кривошипно-кулисный механизм с выстоем ведомого звена

Номер патента: 1504433
Опубликовано: 30.08.1989
Авторы: Канчавели, Тавхелидзе, Тодадзе, Элашвили
МПК: F16H 21/00
Метки: ведомого, выстоем, звена, кривошипно-кулисный, механизм
...на которой расположены оси вращения кривошипа 2 и коромысла 3, выполнена прямолинейная направляющая 8, в которой с возможностью перемещения фиксации установлен упор 9, предназначенный для периодического взаимодействия с коромыслом 3.Механизм работает следующим образом.При установке упора 9 в направляюгцей 8 в нижнее в плоскости чертежа положение (фиг. 1) кривошип 2 через кулису 4 сообщает коромыслу 3 колебательное движение с полной амплитудой. Коромысло 3 не взаимодействует с упором 9, а камень 7 кулисы 4 совершает возвратно-поступательное движение в пазу 5 кулисы 4. Пружина 6, воздействуя на камень 7, обеспечивает устойчивый возврат камня и за счет усилия растяжения в системе коромысло 3 кулиса 4 обеспечивает устойчивое колеба....
Зубчато-рычажное кулисное устройство с выстоем ведомого звена

Номер патента: 539199
Опубликовано: 15.12.1976
Автор: Муравьев
МПК: F16H 37/12
Метки: ведомого, выстоем, звена, зубчато-рычажное, кулисное
...Рыча)кпо-диффсРснцпс 1 льпы.ч мсханизмом, в которой входит ведушсс звено 2, 5)вля)0 цссс 5 Ого центральным колесом, промежуточное колесо 11 и сателлит 12, жестко связанный с крпвошииом 13. 1(рпвошпи 13 установлен шарнирно при помощи ногзалпа 14 на продолжении кривошипа направляющего механизма, В регулирующем механизме ведущее звено 2 и сателлит 12 соединены посредством сопряженной пары: винта 15 и гайки 1 б, а промежуточное колесо 11 установлс. но на шарнирно соединенных рычагах 17 и 18.11 ередаточное число зубчатых пс;редач регулирующего рычажио-дифференциального механизма и дифференциала зубчато-рычажшй кинсматпческой цепи разно плюс сдпнпцс.. стройлво работает следующим обрядом.11 рп вращении вшпа 15 д,)ина АБ рсгулпру)ощсго...
Предыдущий патент: Узел шпинделя шлифовального станка
Следующий патент: Пневматический захват
Случайный патент: Способ определения силы тяги локомотива при его испытании