Система дублерного управления тракторами
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1544212
Автор: Камбулов




Текст
.1 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ГКНТ СССР СКОМУ СВИДЕТЕЛЬСТ(54) СИСТЕМА ДУБЛЕРНОГО УПРАВЛЕНИЯ ТРАКТОРАМИ(57) Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для управления мобильными сельскохозяйственными агрегатами. Цель изобретения - повышение производительности и снижение утомляемости оператора. Система дополнительно снабжена задатчиком 4 поворота идущего трактора, команднои аппаратурой 2 поворотом ведущего трактора, датчиком 1 угла поворота ведущего трактора и исполнительного устройства 3. При пересечении ведущим трактором границы поворотной полосы оператор выключает рабочие органы трактора. При этом в командную аппаратуру 2 поворотом ведущего трактора поступает сигнал, который открывает входы задатчика 4 параметров поворота ведушего трактора и датчика 1 угла поворота ведугцего трактора, Сигналы с задатчика 4 параметров поворота и датчика 1 угла поворота ведущего трактора сравниваются в командной аппаратуре 2 поворотом ведущего трактора, При несравнении команды аппаратура 2 подключает исполнительное устройство 3, которое воздействует на органы уп- Ж равления ведущего трактора. При сравнении команд аппаратура вырабатывает сигнал на 3 ЦЯ отключение исполнительного устройства и прекращение поворота. 1 з. п. ф-лы, 5 ил.5 30 35 аО Фор 5 уа изобретения Изобретение относится к сельскохозяйственному машиностроению, н гястцостц к х ст рОйстця м для уц э 1 Вген и мооц,ьцы мссльскохозяйствеццыми агрег.Ями ицля етс 5 усснерценствсвацием цзобрегеци яв 1. св, Л"о 867334.11 сль изобретсция - ;ювыцецис произ ВОДИТЕЛЬ НОСТИ Ц СНКЕНРЕ УТОМ,51 ЕМОСТЦ ОЦС)ато)эя.На фи. 1 изображена система дублер. ного упрявлеия; на ри. 2 - датчик мглсв поворота ведущего трактора; ца фиг. 3 схема движения тракторов на гоне; я фиг. 4 - схема двцжецц тракторов ца повороте; ця фиг. 5 . схема сравнения сия- лов коман;пюй аппаратуры поворота.Система дублерного уцраьлеция тракторами состог ,фих 1) из датчика 1 угла поворота ведунео трактора, соединенного с командной аппаратурой 2 поворотом веду;пего трактора Олок 2), выходы которого соединены с входами исполнительных органов 3 блок 3), задатчика 4 поворота ведун.ео трактора, выходы которого соединены с входами комашцой аппаратуры 2 поворотом веду пего трактора, измерителя 5 угла межлу продольной осью ведущего трактора и лицией ведупий-ведомой, соединенного с задятчцеом 6 пярямет 1)ОВ дВИксция, измсригель 7 углов крена и наклоня ведуш,его трактора, соединенного с залятчиком 6 параметров движения, линии 8 связи, измерителя 9 расстояния между тракторами, сое;1 иценцо 0 с комяц 1 цои яппярятурои 1 О ведомого ряктора, цсполнительных устройств 11 ве;Омого трактора, которые получают сигналы цз командной аппаратуры 10 веломого трякгор 1, измерителя 12 уг;1 Я между про,цлой ссью ведомого тракторы и линией ведунС 1-вело)й, измерителя 13 углов крена и наклона ведомого трактора.,сятчцк 1 угла поворота ведущего трактора выполнен в виде закрепленной на вертикальной оси 14 части окружности 15 (фиг. 2). По концам закреплены упоры 16, устяцоьлеццые с возможностью регулирования расстояния между ними. Ось 4 через редуктор 7 соединена с потецциометром 18, выход которого электрически соединен с входом командной аппаратуры 2.Система работает следующим образом.Сигналы с измерителя 9 расстояния между тракторами, измерителей 5 и 12 углов ведупего ц ведомого тракторов, через линию 8 связи поступают в командцуо аппаратуру 1 О ведомого трактора. В командной аппаратуре 10 текуцие значения расстояния между пакторямц и углов между их продольной Осьо и агравление 5 ведущийведомьй трактор Вресчитываются в текущие значения величин бокового смещения и продольного расстояния, при этом учитьваются значения угля крена и наклоня ведупего и ведсмого тракторов. Полученные значения бокового сменения и продольного расстояния сявнивяются с заданы и зця-ейияги блок 6), огреэге 5 Отся опнои и вы рабятывяотс 5 ком; цды ГО уп 1) я Влси ю, которые ередаются ця исполнительные устройства 11 по управлению ведомым тряк РОМ,При движении ца гоне (по прямой) фиг, 3) линия 8 сВ 51 зи между Ведгни.". и ве. домым тракторами находится в открытом секторе датчика 1 угля поворота ведущего трактора, це возтеиствуя на ограничители 17.Прц пересечении ведущим трактором граицы (фиг. 4) поворотной полосы оператор выключает рабсчие органь сельскохозяй твенной мацины, при этом в командную аппаратуру 2 поворотом ведущего трактора поступает сигнал, который открывает входы зядатчика 4 параметров повогэота ведмщего трактора и датчика 1 угла поворота ведущего Т 1 эактор 1. Сигналы с задатчика 4 параметров поворота и датчика 1 угла поворота ведущего трактора сравниваются в командной аппаратуре 2 поворотом ведущего трактора.При этом в начале поворота фиг. 3) задатчик 4 параметров поворота имеет на выходе заданное напряжение, а датчик 1 угла поворота -- нулевое значение напряжения. При таком соотношении напряжений командная аппаратура 2 по;клочает исполнительное устройство 3 к источнику питания. Исполнительное устройство 3 воздействует а органы управления ведущего трактора. При повороте трактора на некоторый угол линия 8 связи, воздействуя на ограничитель 16 датчика угла поворота 1, заставляет его поворачиваться вокруг своей оси 14. Через редуктор 17 вряцение передается потецииометру 18, на выходе которого изменяется напряжение. При достижении напряжения ца выходе датчика 1 угла поворота ведупего трактора, равного напряжению задатчика 4 параметров поворота, схема сраывнения командной аппаратуры 2 вырабатывает сигнал, который отключает питание исполнительного устройстваповорот пре(рашается. 1. Система дублерного управления тракторами по авт. св, Ло 867334, от;гачаюшаяся тем, что, с целью повышения производительности и снижения утомляемости оператора, система дополнительно снабжена расположенными на ведущем тракторе задатчиком параметров поворота, датчиком угла поворота, дополнительной командной аппаратурой и исполнительным устройством, причем выходы датчика угла поворота и задатчика параметров поворота подключены к соответствукшим входам дополнительной командной аппаратуры, выход которой связан с входом дополнительного исполнительногоустройства, при этом датчик угла поворота установлен с возможностью механического взаимодействия с линией связи.2. Система по п, 1, от.гачсаощонся тем, что датчик угла поворота выполнен в виде части окружности с упорами на ее концах,закрепленной на вертикальной оси с возможностью врашения последней, при этом вертикальная ось посредством редуктора связана с потенциометром, выходы которого электрически соединены с соответствующими входами командной аппаратуры.Составитель Л, КузовкинРедактор В. Бугренкова 1 ехрсл И Версс Корректор М. КучеряваяЗаказ 441 Тираж 4 ь 9 ПодписноеВНИИПИ Госуларственного когиитета по изобретениям и открытиям при ГКНТ СССР13035, Москва, Ж - 35, Раушская наб., д. 4/5Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 01
СмотретьЗаявка
4378936, 12.02.1988
ВСЕРОССИЙСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ МЕХАНИЗАЦИИ И ЭЛЕКТРИФИКАЦИИ СЕЛЬСКОГО ХОЗЯЙСТВА
КАМБУЛОВ ИВАН АЛИКАНОВИЧ
МПК / Метки
МПК: A01B 69/04
Метки: дублерного, тракторами
Опубликовано: 23.02.1990
Код ссылки
<a href="https://patents.su/4-1544212-sistema-dublernogo-upravleniya-traktorami.html" target="_blank" rel="follow" title="База патентов СССР">Система дублерного управления тракторами</a>
Интегрально-оптический датчик параметра физического поля

Номер патента: 1320721
Опубликовано: 30.06.1987
Авторы: Богатырев, Григорьев, Оробинский, Широков
МПК: G01N 21/41
Метки: датчик, интегрально-оптический, параметра, поля, физического
...опорноеплечо 6 которого расположено на массивной части подложки 7. Фоторегистрирующая система 8 установлена навыходе интерферометра.Устройство работает следующим образом.Излучение лазера 1 вводится впланарный интерферометр 2, затемразветвляется по сигнальному 5 и1опорному 6 плечам интерферометра.Измеряемая величина, действующая вплоскости пластины 3, т.е. в чувствительной зоне, вызывает реакцию модулирующего покрытия 4, приводящую кдеформации сигнального плеча интерферометра (вследствие, например, маг. нитострикционного или электрострикционного эффекта) . Таким образом вызывается модуляция фазы оптическогоизлучения, распространяющегося всигнальном плече, которая на выходеинтерферометра преобразуется в модуляцию интенсивности....
Интерференционный датчик измерения углов поворота объекта с отражающей поверхностью

Номер патента: 504080
Опубликовано: 25.02.1976
Авторы: Круглов, Любимов, Тихонов
МПК: G01B 11/26
Метки: датчик, интерференционный, объекта, отражающей, поверхностью, поворота, углов
...пропускаюшее излу 0 ченпе, светочувствительный элемент 6 и электронный блок 7. Интерференционная плоскопараллельна пластина 4 установлена между цсточнико 1 излучения и объектом (плоским зерка 25 лом) 8 так, чтоотраженныеот объекта 8ния и и толщины д, пластины 4 и дли-ны волны излучения А. При постоянстве в измерительной схеме н., а и Л расстояние между максимумами потока бу дет функцией от угла поворота объекта 8. Регистрируя с помощью электронногоблока количество максимумов или минимумов светового потока, попадающего на 10 светочувствительный элемент, можно получить не только суммарный угол поворота объекта, но и закон изменения угла поворота его во времени,лучи, интерферируя на плоскопараллельнойпластине, направляются...
Датчик параметров ветра

Номер патента: 180415
Опубликовано: 01.01.1966
Авторы: Грушин, Протопопов
МПК: G01D 5/245, G01P 13/02, G01P 5/07
Метки: ветра, датчик, параметров
...скорости за минуту перезаписывается, начинал спервой ячейки, т. е. значение за одиннадцатую 20минуту записывается в первую ячейку вместостарого значения, за двенадцатую - во вторую за дадцатуюв десятую, за двадцатьпервую минуту - снова в первую и т. д. Таким образом, в любой момент сумма значений 25минутных средних скоростей в десяти ячейках всегда равна средней скорости ветра заистекшую десятиминутку,Максимальная скорость ветра за 10 линвырабатывается по тому же принципу, что и 30средняя: сначала в датчике получается максимальная скорость за 1 чин, а затем в центральном устройстве производится выбор максимальной скорости ветра за десятиминутныйпитерл, Так же, как и для средней скорости 55ветра, используется...
Датчик параметров движения
Номер патента: 300827
Опубликовано: 01.01.1971
Автор: Синельников
МПК: G01P 3/42
Метки: датчик, движения, параметров
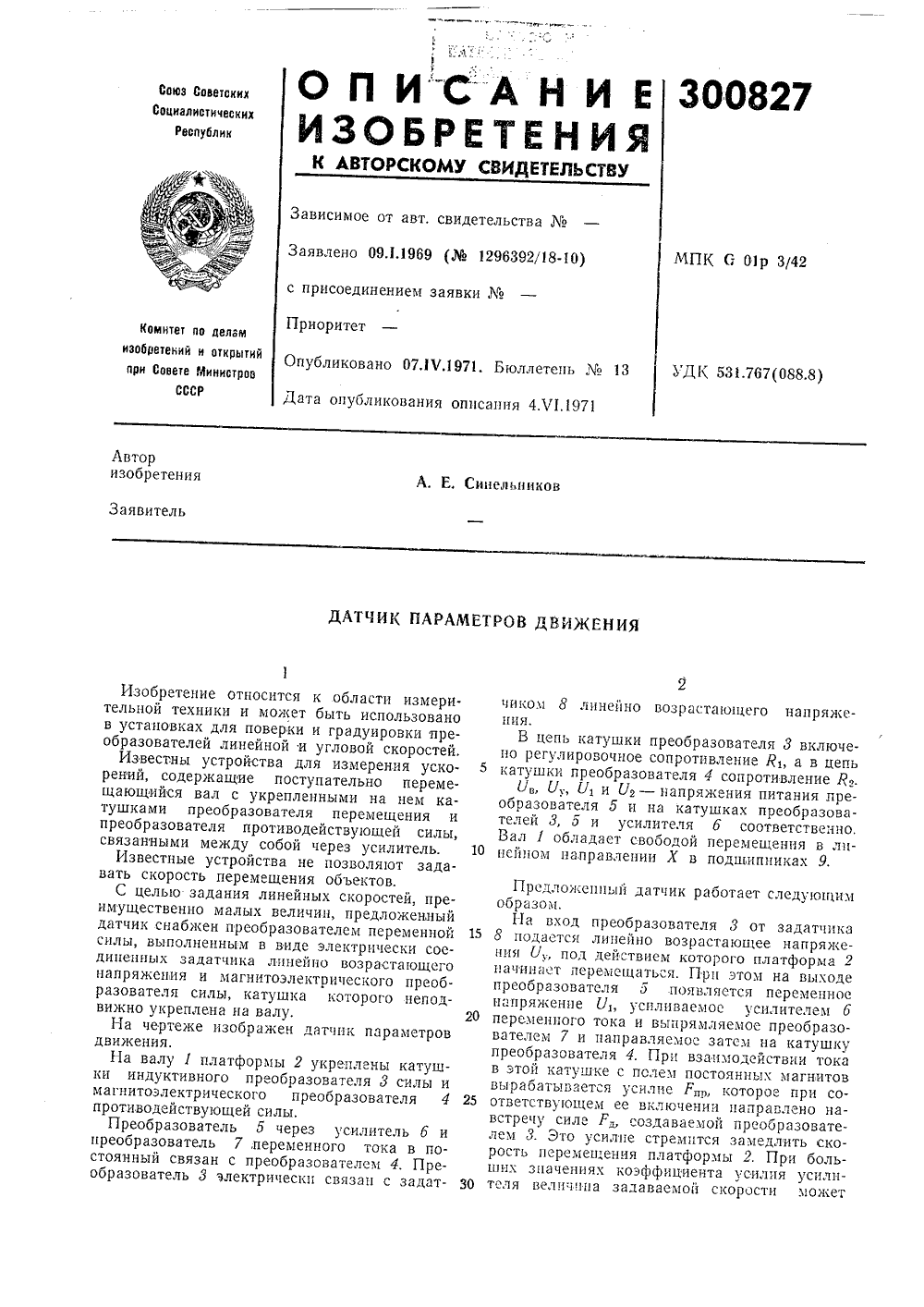
...устройства не позволяют задавать скорость перемещения объектов.С целью задания линейных скоростей, преимущественно малых величин, предложенный датчик снабжен преобразователем переменной силы, выполненным в виде электрически соединенных задатчика линейно возрастающего напряжения и магнитоэлектрического преобразователя силы, катушка которого неподвижно укреплена на валу.На чертеже изображен датчик параметров движения.На валу 1 платформы 2 укреплены катушки индуктивного преобразователя 8 силы и магнитоэлектрического преобразователя 4 противодействующей силы,Преобразователь 5 через усилитель б и преобразователь 7,переменного тока в постоянный связан с преобразователем 4. Преобразователь 8 электрически связан с задатвозраста 1...
Устройство для управления углом поворота вала электродвигателя

Номер патента: 572758
Опубликовано: 15.09.1977
МПК: G05B 11/14
Метки: вала, поворота, углом, электродвигателя
...трансформатора, а общая точка 18 обмоток управления электродвигателем подключена к другому входу второго дополнительного ключа 24.В исходном состоянии ключ 24 - закрыт, а ключ 21 - открыт, и так как сигнал на выходе элемента ИЛИ 11 отсутствует, усилитель 17 работает в линейном режиме, обеспечивая регулирование скорости электродвигателя 1. Режим ограничения формируется по переменному напряжению, пропорциональному углу поворота вала, которое с датчика 3 угла поступает на вход демодулятора 6,При выходном напряжении демодулятора 6, превышающем напряжение срабатывания пороговых элементов 7 и 8, срабатывает один из них и снимает сигнал запрета на срабатывание соответствующего триггера 9 или 10. После этого знак выходного напряжения триггера...
Предыдущий патент: Устройство для автоматического вождения сельскохозяйственной машины по травостеблестою
Следующий патент: Рулевой автомат
Случайный патент: Способ магнитной сепарации жидкостей с регенерацией фильтрующей загрузки и устройство для его осуществления