Самонастраивающаяся по входному сигналу система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1529176
Авторы: Архангельский, Мищенко, Прокофьева, Топильский

Текст
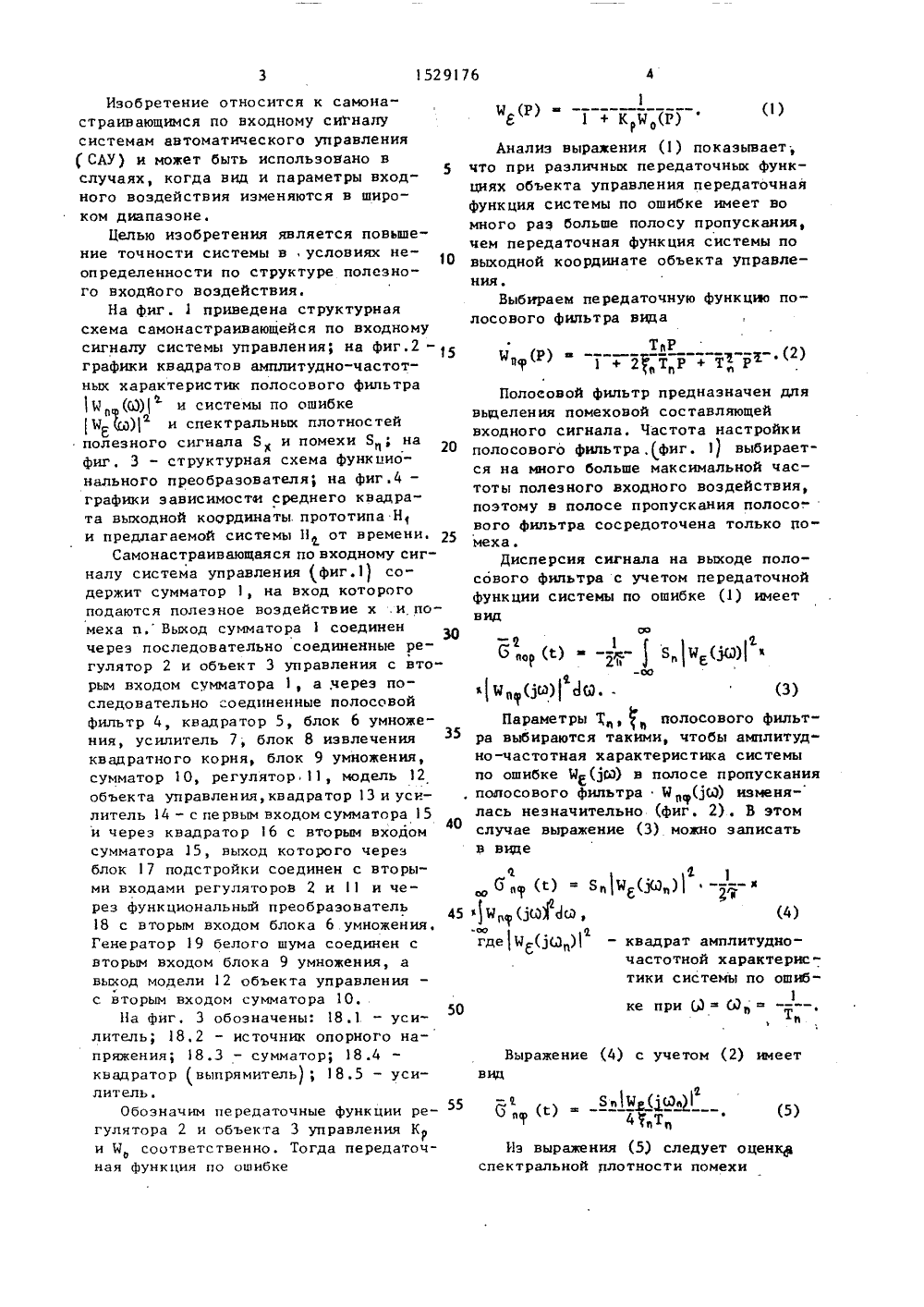
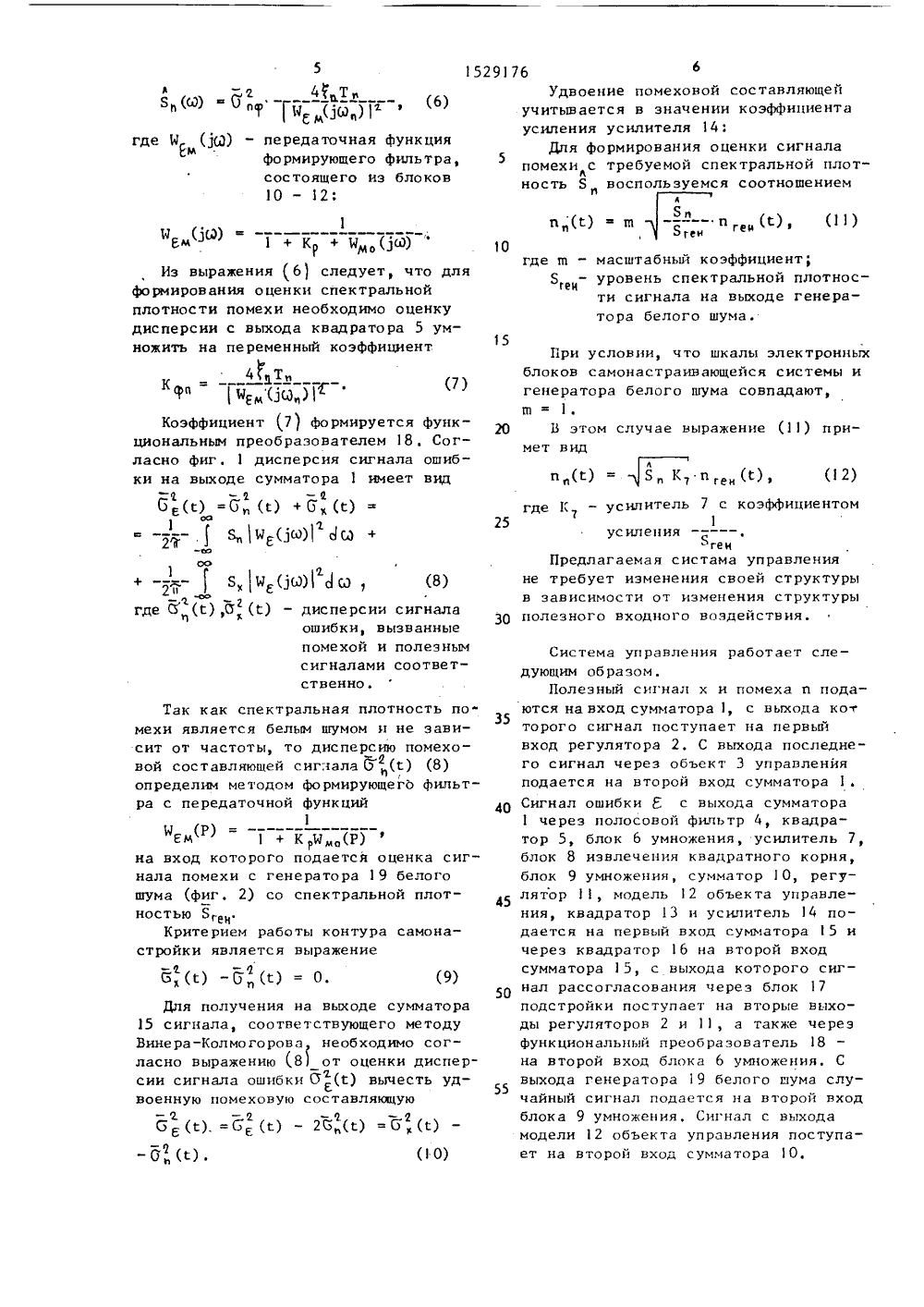
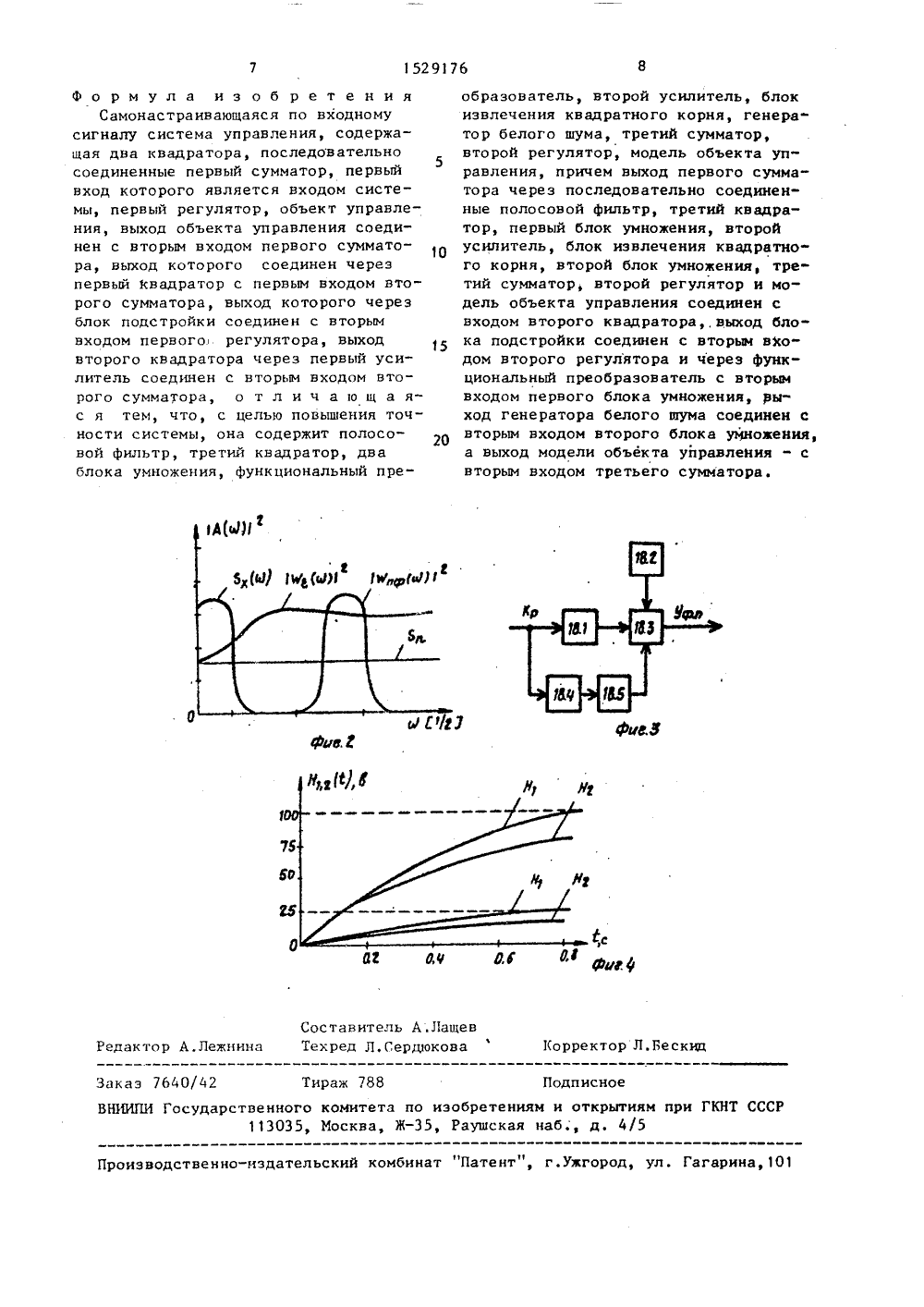
(504 С 05 В 13 02 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИЯ н, ",(21 ) 431 6660/24-24(56) Авторское свидетельство СССРУ 439788, кл. С 05 В 13/02, 1974.(57) Изобретение относится к само -настраивающимся по входному сигналусистемам автоматического управленияи может быть использовано, когда види параметры входного воздействия изменяются в широком диапазоне. Цельизобретения - повышение точности систе(ы в условиях неопределенности поструктуре полезного входного воздействия, Самонастраивающаяся по входному сигналу система управления со -держит последовательно соединенныесумматор 1, регулятор 2, объект управления 3, выход которого соединенс вторым входом сумматора 1, выходкоторого через последовательно соединенные полосовой фильтр 4, квадратор 5, блок умножения 6, усилитель 7блок извлечения квадратного корня 8,блок умножения 9, сумматор 10, регулятор 11, модель объекта управления12 квадратор 16 и усилитель 14 соединен с первым входом сумматора 15.Новым является введение полосовогофильтра 4, квадратора 16, функционального преобразователя 18, блокаумножения 9, усилителя 14, блока из -влечения квадратного корня 8, генератора белого шума 19, сумматора 15,регулятора 11, модели объекта управ -ления 12, а также обусловленных данными элементами новых связей. 4 ил.Изобретение относится к самонастраивающимся по входному сиГналу системам автоматического управления ( САУ) и может быть использовано в случаях, когда вид и параметры входного воздействия изменяются в широком диапазоне.Целью изобретения является повышение точности системы в, условиях неопределенности по структуре полезного входйого воздействияНа фиг. 1 приведена структурная схема самонастраивающейся по входному сигналу системы управления, на фиг.2 - 15 графики квадратов амплитудно-частотных характеристик полосового фильтра 1 М,р(Я)1 и системы по ошибке ЫЕИ) и спектральных плотностей полезного сигнала ЯХ и помехи Я; на фиг. 3 - структурная схема функиио" нального преобразователя; на фиг4 в графики зависимости среднего квадрата выходной кос)рдинаты. прототипа Нр и предлагаемой системы Н от времени. 25Самонастраивающаяся повходному сигналу система управления фиг.1 содержит сумматор 1, на вход которого подаются полезное воздействие х .и помеха и. Выход сумматора 1 соединен через последовательно соединенные регулятор 2 и объект 3 управления с вторым входом сумматора 1, а через последовательно :оединенные полосовой фильтр 4, квадратор 5, блок 6 умножеусилитель 7 блок 8 извлечения квадратного корня, блок 9 умножения, сумматор 10, регулятор 11, модель 12 объекта управления,квадратор 13 и усилитель 14 - с первым входом сумматора 15 и через кнадратор 16 с вторым входом40сумматора 15, выход которого через блок 17 подстройки соединен с вторыми входами регуляторов 2 и 11 и через функциональный преобразователь18 с вторым входом блока 6 умножения,Генератор 19 белого шума соединен свторым входом блока 9 умножения, авыход модели 12 объекта управлениягс вторым входом сумматора 10.На фиг, 3 обозначены: 18.1 - уси 50литель; 182 - источник опорного напряжения; 18.3 - сумматор; 18.4квадратор выпрямитель); 18.5 - усилительОбозначим передаточные функции регулятора 2 и объекта 3 управления Кри И соответственно. Тогда передаточная функция по ошибке1ф)1 (Р) (1)Кр 11 о(Р)Анализ выражения (1) показывает;что при различных передаточных функциях объекта управления передаточнаяфункция системы по ошибке имеет вомного раз больше полосу пропускания,чем передаточная функция системы повыходной координате объекта управления,Выбираем передаточную функцио полосового фильтра вида ТР1 + 2 рТР + Т Р Япт(Р) Полосовой фильтр предназначен для выделения помеховой составляющей входного сигнала. Частота настройки полосового фильтра,фиг. 1) выбирается на много больше максимальной частоты полезного входного воздействия, поэтому в полосе пропускания полосо". вого фильтра сосредоточена только Помеха.Дисперсия сигнала на выходе полосового фильтра с учетом передаточной функции системы по ошибке (1) имеет вид й. 1 5 га) Ю -)Л-БраП( и и)( ЙП) . З) Параметры Та,лолоооаого фыльтра выбираются такими, чтобы амплитудно-частотная характеристика системы по ошибке 11(Р) в полосе пропускания полосового фильтра Я,ц (1 Я) изменялась незначительно (фиг. 2). В этом случае выражение (3) можно записать в виде Выражение (4) с учетом (2) имеетвидВ.Ь (1 а.)бфПП)4 7 т(5)Иэ выражения (5) следует оценкуспектральной Плотности помехи( п И) 8,1 р 1 (ЗИ ),-- ф1 ициУь, (4)9йгде 1"1(1 Я,- квадрат амплитудночастотной характеристики системы по ошиб 1ке при ЯЯ1529176Удвоение помеховой составляющей учитывается в значении коэффициента усиления усилителя 14:Дпя формирования оценки сигнала 5 помехи с требуемой спектральной плотлность Я воспользуемся соотношением(З 1)8 м 1 + Из выражения ( 6формирования оценкиплотности помехи нео следует дл ьной спектбход им ценку 5 ум- ент ерсии с выхода квадрато ть на переменный коэффи о 1 Т(рп Я м (З)т (7) ф ся функ 18. Сог ла ошиб ируе елем еобраэо дисперс лас сумматора 1 имеет вид+ (7 (с)- Е(1 ки наЕ ( н 1 29сигналзванн дисперсии ошибки, в помехой и лез ным ответгналами твенно тно как спектральная п ляется белым шумом частоты, то диспер тавляющей сигнала 6 им методом формиру редаточной функций и завимехо(8)фильтию и к) щегб опредра с ы,(р)дается оце атора 19 б ектральной 1+К ото ого пна вход к рнала помешума (фиг )ностью Блея.Критерием работстройки является вБ(е) -С(с) ка сиглого о Дл а выходе суммат тствующего мето полученнала, со -Кол мо го 15 си Вине р ласно 81 ои ОС вь нию ош сии сигн еннб помех 1 О) Таехиит оой с ффицие ьным п фиг1 выходе контура самонаажение еобходимо согт оценки дисие (С) вычесть уд тавляющую (с) = 5(с)оэффициент тральной п масштабныи де н - уровень сп ти сигнала тиос на выход нера ора бе ма При усл шкалы эле ющейся си ии, чтастраивелого ронныхемы и блоков сам генератора ма совп 1. В это11) и раже чае мет вид 2) К - усилитель 7 с коэффициент71 8 геи я систама у енения свое Предлага требуетзависимос авленияструктуры изменени структувия. лезного входного воздеи Система управления работает сле -дующим образом, Полезный сигнал х и помеха и подат на второи вход сумматора ются на вход сумматора 1, с выхода ко 5торого сигнал поступает на первыйвход регулятора 2. С выхода последнего сигнал через объект 3 управленияподается на второй вход сумматора 1.Сигнал ошибки Я с выхода сумматора1 через полосовой фильтр 4, квадратор 5, блок 6 умножения, усилитель 7,блок 8 извлечения квадратного корня,блох 9 умножения сумматор 1 О, регу лятор 11, модель 12 объекта управления квадратор 13 и усилитель 14 подается на первый вход сумматора 15 ичерез квадратор 16 на второй входсумматора 15, с выхода которого сигнал рассогласования через блок 17подстройки поступает на вторые выходы регуляторов 2 и 11, а также черезфункциональный преобразователь 18на второй вход блока 6 умножения. С 5выхода генератора 19 белого шума случайный сигнал подается на второй входблока 9 умножения. Сигнал с выходамодели 12 объекта управления поступа1529176 Фиа.8 сФиг ФИ Составитель А.ЛащевТехред Л.Сердюкова Корректор Л, Бе скнд А.Лежнин Заказ 7640/42 Тираж 788ВНИИПИ Государственного комитета по113035, Москва, ЖПодписноеобретениям и открытиям при ГКНТ СССРаушская наб., д. 4/5 роизводственно-издательский комбинат "Патент", г.ужгород, ул . Гагарина, 10 Формула из обретенияСамонастраивающаяся по входному сигналу система управления, содержащая два квадратора, последовательно соединенные первый сумматор, первый вход которого является входом системы, первый регулятор, объект управления, выход объекта управления соединен с вторым входом первого сумматора, выход которого соединен через первый квадратор с первым входом второго сумматора, выход которого через блок подстройки соединен с вторым входом первого регулятора, выход второго квадратора через первый усилитель соединен с вторым входом второго сумматора, о т л и ч а ю щ а яс я тем, что, с целью повышения точности системы, она содержит полосовой фильтр, третий квадратор, два блока умножения, функциональный преобразователь, второй усилитель, блокизвлечения квадратного корня, генератор белого шума, третий сумматор,второй регулятор, модель объекта управления, причем выход первого сумматора через последовательно соединенные полосовой фильтр, третий квадратор, первый блок умножения, второйусилитель, блок извлечения квадратного корня, второй блок умножения, третий сумматор, второй регулятор и модель объекта управления соединен свходом второго квадраторавыход блока подстройки соединен с вторым входом второго регулятора и через функциональный преобразователь с вторымвходом первого блока умножения, выход генератора белого шума соединен свторым входом второго блока умножения,а выход модели объекта управления - свторым входом третьего сумматора.
СмотретьЗаявка
4316660, 03.07.1987
ВОЙСКОВАЯ ЧАСТЬ 03444
АРХАНГЕЛЬСКИЙ АЛЕКСАНДР ВЛАДИМИРОВИЧ, МИЩЕНКО ЮРИЙ ИВАНОВИЧ, ПРОКОФЬЕВА РИММА ИВАНОВНА, ТОПИЛЬСКИЙ СТАНИСЛАВ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: входному, самонастраивающаяся, сигналу
Опубликовано: 15.12.1989
Код ссылки
<a href="https://patents.su/4-1529176-samonastraivayushhayasya-po-vkhodnomu-signalu-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся по входному сигналу система управления</a>
Система автоматического управления

Номер патента: 1168897
Опубликовано: 23.07.1985
МПК: G05B 13/02
...легко решается, если известны функции го(1) и )г (1). Для их нахождения проинтегрируем выражение (5) в пределах одного интервала управления 1 Е О, Тб (1) - б (0) =1(го(т) +гг 1(т) Щт) ) дт. (6)Параметризуем функции /со (1) и К(1)оРУо(1) = Е У,1, Ягг(1) = Е ъ;1 (7)и для простоты принимаем з = р=1 и /5,"= а РГ =аРою = а а, у, =а. Перепишем выражение (6) в видеЬб (1) =(а,+ аг+ а,ц (Т ) +О=ЛО (1) - 1,(аз+ат)1(т) дт (9) и рассматриваем функционал вида11(1) =5,7 (т) дт. (10)Используя йеобходимые условия минимума функционала (0), получаем выражениядбц(У)дУд = 1,(Ъ+ + сг у) и )Ку , и(у)сИсИ1 а(а 1 Га ) У. - 1хааа +ау)ц( у)д ),Рц( )ддС, (11)Решив систему (11) для любого 1 е (О,Т получаем значения аз(1) и а(1), которые позволяют определять...
Демодулятор фазоманипулированных сигналов

Номер патента: 524306
Опубликовано: 05.08.1976
Авторы: Войченко, Крикун, Медиченко, Оводков, Панасенко, Суворов, Тотухов
МПК: H03D 3/24
Метки: демодулятор, сигналов, фазоманипулированных
...квадратора6 и второму входу перемножителя 5, к первому входу котором также подключейы поои ледовательно соединенные дойолнительный,квадратор 7, инвертор 8 и сумматор 9, Вьаход перемножителя 5 подклктчен к одномуиз входов дополнительного перемножителя10, к второму входу которого подключенвыход квадратора 6 через сумматор 9, ак выходу - фильтр 11, выход которого сое; дующим образом.О Если на входы фазов 1 и2 поступают из канала двухкратной фаэовой манипуе,)-я со,.ю,+,.где Яамплитуда принимаемого сигипа," ых детекторовсвязи сигналыляции вида;а,),пе29 Подписноемитета Совета Министров СССретений и открытий-35, Раушская набд, 4/5 Заказ 5003/378 ОНИ)Ц)И Г Тира осударственн по делам 3035, Мос(1 лиан Г)П "Патент", г.Ужгород, ул, Проектная, 4 р/ -...
Устройство для диагностики двигателя внутреннего сгорания

Номер патента: 473380
Опубликовано: 05.06.1975
Авторы: Бруно, Вирджилио, Пьетро
МПК: G01M 15/00
Метки: внутреннего, двигателя, диагностики, сгорания
...с фо)змцроватслем импульсов 12.При проведении операций диагностики датчик вибраций 1 через блок усиления и фильтрации 2 подает сигнал прц открытой логической ячейке 3 через цепь сопротивления ц емкости 7 в регистратор 6. Электронный стробирующпй блок 4 благодаря системе управления 5 открывается в период от начала фазы выпуска до момента зажигания, так чтооткрытие его совпадает с ником максимального давления в цилиндре двигателя.Ипдуктив)ый зонд 11 улавливает импульс 1 рп каждом момс)ггс зажигания и подает его через (1 ормцро атель импульсов 12 и юльтивибратор 13 ца интегратор 14 тока, ца выходе которого получается напряжение, обратно проорцио)альос скорости. тцм напряжением зарюкаются ко)денсаторы 15, 16, которые при следу)ощем полуцикле...
Адаптивная система управления потенциально опасным объектом

Номер патента: 1423977
Опубликовано: 15.09.1988
Авторы: Левинский, Редунов, Хобин
МПК: G05B 11/01
Метки: адаптивная, объектом, опасным, потенциально
...зависимостьХ при Х -Х )О,Х1Х при Х-Х О,Изменение интенсивнос(14)о Сигнал Х (г.) с выхода измерителя 14 рассогласования возводится в квад ти, спектрального состава неконтролируемыхвнешних возмущений ц и параметровобъекта 3 управления во времени вызыРвают изменения статистических характеристик случайного процесса Х(Т),что требует и соответствующей настройки порогового заданного значенияХ , по (8, 9),Реализацию этих зависимостей выполняют блок 18 оценки статистическихпараметров регулируемой величины,блок 19 оценки статистических параметров случайной и периодичегкой составляющих, блок 57, блок 42 коррекции порогового заданного значения иизмеритель 62 рассогласования.Блок 18 на скользящем интервалевремени Г оценивает статистическиепараметры...
Система оптимизации управления непосредственно и косвенно управляемыми объектами

Номер патента: 1080117
Опубликовано: 15.03.1984
Автор: Попов
МПК: G05B 13/02
Метки: косвенно, непосредственно, объектами, оптимизации, управляемыми
...й Ч и передаются в блок задания1 К,1 ытекущего направления напряженности поля потерь 9, Сформированные в блоке задания текущего направления на пряженности поля потерь 9 задающие сигналы направления изменения текущего состояния параметров потерь Впоступают с выхода блока задания текущего направления напряженности поля потерь 9 в блок задания напря 38женности поля потерь 10. В блоке задания напряженности поля потерь 1 О формируется значение текущей напряженности пространства потерь косвенно управляемого объекта и передается с первого выхода непосредственно или покомпонентно в вице значений параметров 6 и Х В " В на первый входк дк 1блока оценки ожидаемого приращения потерь 11. Связь второго выхода блока задания напряженности поля Потерь...
Предыдущий патент: Следящая система
Следующий патент: Устройство для программного управления кинопроектором
Случайный патент: Электромагнитный двигатель