Устройство компенсации нелинейности
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИХРЕСПУ БЛИН А 1 444 05 5/01 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТ ОПИСАНИЕ ИЗОБРЕТЕН А ВТОРСКОМУ СВИДЕТЕЛЬСТВ 139/24-241.86.Н р, .Анжеров50 (088.8)цев Г.ф., Стеклов В.К.нные следящие системы.1978, с.118, рис,59 аское свидетельство СССР4, кл. 0 05 В 5/01, 19 ти автоматического управления и рег лирования и может быть использовано в следящих системах, системах стаби лизации и программного управления,в приборах вычислительной техники и автоматики. Цель изобретения - повышение точности компенсации, Поставленная цель достигается яа счет формирования компенсационного сигнала, при котором в пределах зоны нечувствительности нелинейного звена объекта компенсации обеспечивается минимально возможное время переходного процесса инерционного звена объекта компенсации. 2 ил.Изобретение относится к автоматическому регулированию и может быть использовано в следящих системах, системах стабилизации и программно 5 го управления, в приборах вычислительной техники и автоматики и в другой аппаратуре, содержащей инерционный нелинейный элемент типа зоны нечувствительности, и предназначено для улучшения динамических характеристик этих систем.Цель изобретения - повышение точНости компенсации.На фиг,1 изображена структурная схема устройства компенсации нелинейнос тиУстройство компенсации,елинейности, содержит сумматор 1, ин ерционное звено 2 и нелинейное звено 3 с 2 п зоной нечувствительности, первую модель 4 инерционности звена объекта компенсации, релейный элемент 5, делитель напряжения б, блок сравнения абсолютных значений 7, ключ 8, вто рую модель 9 инерционности звена объекта компенсации.Устройство работает следующим образом.Блок сравнения абсолютных значений 7 сравнивает абсолютные значения сигналов на выходе делителя напряже - ния б и второй модели 9 и, если сигнал на выходе делителя напряжения 6 больше сигнала на выходе второй модели 9, то ключ 8 подключает второй35 вход сумматора 1 к выходу релейного элемента 5, а если меньше, то к выходу делителя напряжения 6.Предположим, что в момент включения системы в работу входной сигнал Х(фиг.2) имеет положительный знак и в дальнейшем изменяется по гармоническому синусоидальному закону, Тогда сигнал на выходе первой модели 4 инерционности звена Х, также станет положительным и в дальнейшем изменяется по такому же закону, имея некоторое фазовое отставание, Релейный элемент 5 преобразует сдвинутый по фазе сигнал в прямоугольное напря 50 жение Х, которое поступает на первый вход ключа 8 и, уменьшившись в делителе напряжения 6 (сигнал Х) до величины зоны нечувствительности нелинейного элемента, поступает на второй вход ключа. Поскольку в исходном состоянии сигнал на выходе второй модели 9 инерционности звена Х был равен нулю, а ХО, то блоксравнения абсолютных значений 7 переводит ключ 8 в положение, соединяющее второй вход сумматора с выходом .репейного элемента 5. С этого момента компенсационныи сигнал Х ,равенсигналу на выходе релейного элемента 5, Этот сигнал может во много разпревышать уровень зоны нечувствительности нелинейного звена 3. Инерционное звено 2 и вторая модель 9инерционности звена начинают отрабатывать этот сигнал со скоростью максимально возможной для конкретногоинерционного нелинейного звена, которая прямо связана с уровнем ограничения релейного элемента 5, Приэтом сигнал Х постоянен, аХ 1возрастает. Поскольку сигнал навходе второй модели 9 инерционностизвена Х= Х намного больше сигнала Х , то через некоторое вреИя сигнал на выходе второй модели Х больше Х. В этот момент блок сравненияабсолютных значений 7 переключаетключ Я в противоположное состояние,соединив второй вход сумматора 1 свыходом делителя напряжения б. Приэтом компенсационный сигнал Х,сигнал на выходе делителя напряжения 6и сигнал на выходе второй модели 9инерционности звена Х практическиравны, Такие уровни сигналов компенсационного канала сохраняют до момента изменения знака на выходе первоймодели 4 и,. следовательно, на выходе релейного элемента 5 и делителянапряжения 6.При изменении знака входного сигнала, а затем и сигналов на выходеблоков 4 - 6 изменяется полярностькомпенсационного сигнала Х. Сигнална выходе второй модели 9 инерционности звена Х 1 начинает уменьшатьсяи стает меньше величины Хз, Циклкомпенсации повторяется,Такое формирование сигнала Хк обеспечивает минимально возможное время переходного процесса инерционного звена 2 в пределах зоны нечувствительности нелинейного звена 3.Формула изобретенияУстройство компенсации нелинейности, содержащее сумматор, первую модель инерционности объекта компенса 3 1 ИО ции, вход которой соединен с первым входом сумматора, а выход с входом релейного элемента, вторую модель инерционности звена объекта компенса 5 ции, о т л и ч а ю щ е е с я тем, что, с целью повьппения точности компенсации, дополнительно введены делитель напряжения, ключ и блок сравнения абсолютных значений, причем выход релейного элемента соединен с первым информационным входом ключа 54и входом делителя напряжения, выход которого соединен с вторым информационным входом ключа и первым входом блока сравнения абсолютных значений, второй вход которого соединен с выходом второй модели инерционности звена объекта компенсации, а выход - с управляющим входом ключа, выход которого соединен с входом второй моде" ли инерционности звена объекта компенсации и вторым входом сумматора,
СмотретьЗаявка
4003139, 02.01.1986
ПЕРМСКОЕ ВЫСШЕЕ ВОЕННОЕ КОМАНДНО-ИНЖЕНЕРНОЕ КРАСНОЗНАМЕННОЕ УЧИЛИЩЕ РАКЕТНЫХ ВОЙСК ИМ. МАРШАЛА СОВЕТСКОГО СОЮЗА ЧУЙКОВА В. И
НЕКРАСОВ ВАЛЕРИЙ ГЕОРГИЕВИЧ, ПРОКОШЕВ ЛЕОНИД АЛЕКСАНДРОВИЧ, ЖАНЖЕРОВ ЕФИМ ГРИГОРЬЕВИЧ
МПК / Метки
МПК: G05B 5/01
Метки: компенсации, нелинейности
Опубликовано: 15.12.1988
Код ссылки
<a href="https://patents.su/4-1444705-ustrojjstvo-kompensacii-nelinejjnosti.html" target="_blank" rel="follow" title="База патентов СССР">Устройство компенсации нелинейности</a>
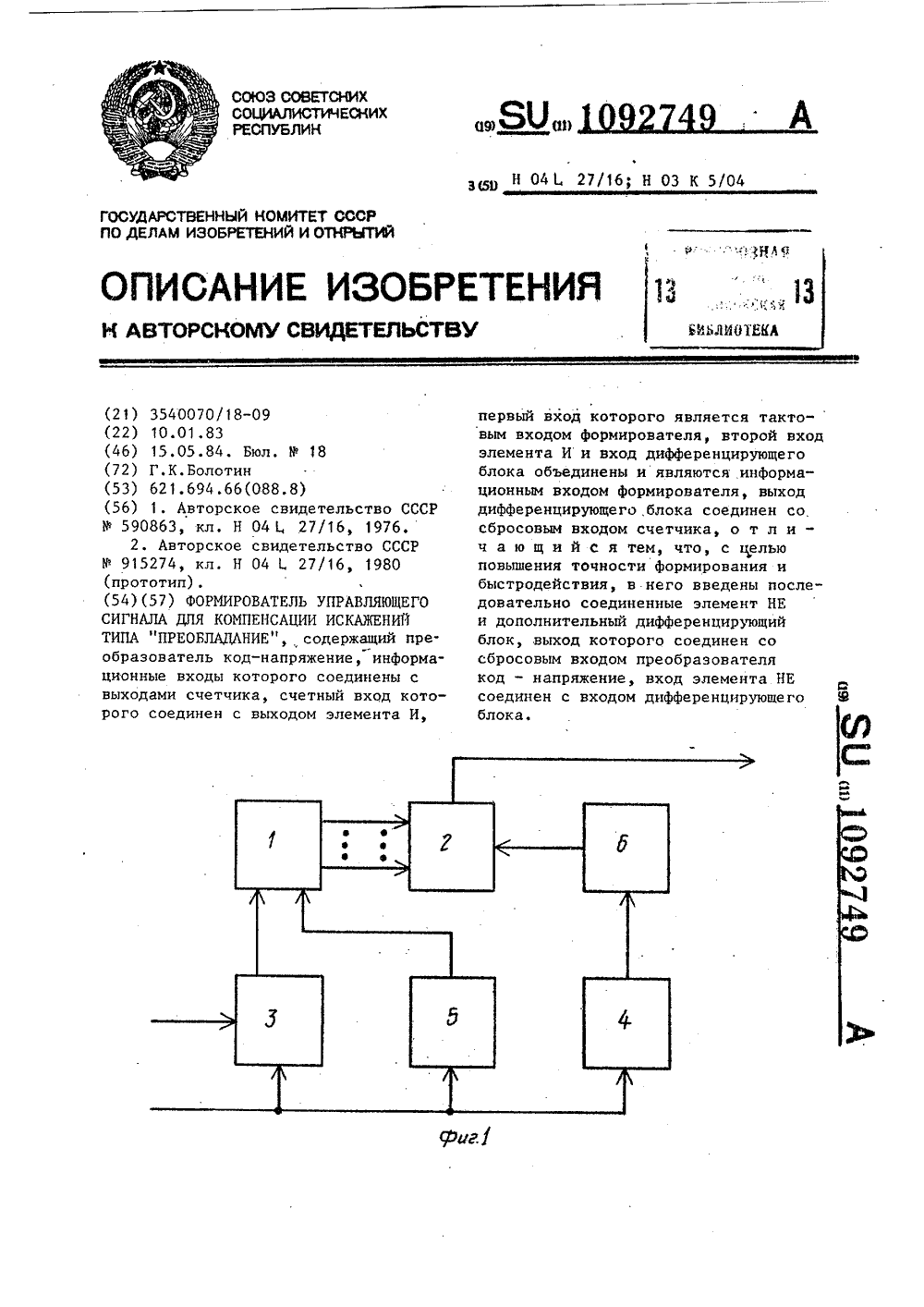
Формирователь управляющего сигнала для компенсации искажений типа “преобладание
Номер патента: 1092749
Опубликовано: 15.05.1984
Автор: Болотин
МПК: H04L 27/16
Метки: искажений, компенсации, преобладание, сигнала, типа, управляющего, формирователь
...погрешности формирования корректирующего воздействия(а следовательно, и выше точностькомпенсации искажений), так как вэтом случае однозначно уменьшаетсяи элементарная минимально возможнаявеличина приращения (т.е, шаг дискритизации выходного напряжения или,другими словами, "высота ступеньки",преобразователя код-напряжение)уровня корректирующего напряжения.На информационный вход поступаютъимпульсы, длительностькоторыххарактеризует величину имеющегосяпреобладанияпринимаемых элементовсообщения,В момент смены на информационном входе уровня напряжения логического нуля на уровень напряжения логической единицы (Фиг. 2 а) на выходе дифференцирующего блока 5 (фиг. 2 ъ) Формируется короткий импульс, сбрасывающий показания (заряд) счетчика...
Устройство для регенерации цифрового сигнала и компенсации межсимвольных искажений

Номер патента: 1508352
Опубликовано: 15.09.1989
МПК: H03M 13/25
Метки: искажений, компенсации, межсимвольных, регенерации, сигнала, цифрового
...решающего ЗО вого этапа одновременной коррекцииблока 4 и группы 6, задержанные в и регенерации в. матрице 12 в группу 8группе 11 на число тактов, равное чис- корректора с йрямыми связями по решелу компенсируемых отсчетов преддейст- нию поступают сигналы с повышеннойвия. На другие входы матрицы 13 по- верностью, и второй этап коррекцииступают в цифровом виде с выхода про- и регенерации посредством матрицы 13граммируемой логической матрицы 1235осуществляется более качественно.сигнвлы о значениях регенерированных Выходные сигналы с выхода матрипредшествующих сигналах и с выходов цы 14 последнего блока 1.И компенсаэлементов 9 группы 10 - о значениях ции поступают в выходной усилитель 5,регенерированных последующих сигна 40который...
Формирователь управляющего сигнала для компенсации искажений типа “преобладание

Номер патента: 1676109
Опубликовано: 07.09.1991
Авторы: Иванов, Кишенский, Крекер, Решетников
МПК: H03K 5/04, H04L 27/16
Метки: искажений, компенсации, преобладание, сигнала, типа, управляющего, формирователь
...т 0 принимается решение о приходе двух смежных положительных посылок, и т,д; В общем случае при длительности принятого сигнала в интервале от(1-0,5) т 0 до(+ 0,5) т 0, где = 1,2,. принимается решение о, поступлении на информационный вход 1-кратной смежной положительной посылки,Если длительность принимаемого положительного сигнала меньше г, то при поступлении на информационный вход от 167610945 рицательного фронта с выхода дифференцирующего блока 10 сигнал поступает на один вход элемента ИЛИ 3 и с его выхода далее на счетный вход счетчика 5, который переходит в состояние "1" (единица в младшем разряде). Этот же импульс с некоторой задержкой, пройдя через блок 8, передним фронтом сбрасывает число, хранящееся в памяти преобразователя 7, а...
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1741034
Опубликовано: 15.06.1992
Авторы: Воронов, Головков, Осипов, Павлов, Приходько
МПК: G01N 22/00, G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...для реализации интерференции двух световых лучей,прошедших через сечение измерительной линии 2. Фотоприемник 13 предназначен для преобразования интенсивности светового луча на выходе сумматора 12 света в электрический сигнал. Источник 3 смещения предназначен для установки требуемой рабочей точки на модуляционной характеристике интерферометра.Устройство работает в двух режимах; режиме калибровки и режиме измерения,В режиме калибровки к измерительной линии 2 вместо исследуемого элемента подключается эталонная короткозамкнутая линия. Сигнал СВЧ-генератора 1 поступает на вход измерительной линии 2 и далее на эталонную линию. В результате интерференции падающей и отраженной волн СВЧ-сигнала в измерительной линии устанавливается режим...
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1328766
Опубликовано: 07.08.1987
Авторы: Головков, Кузнецов, Недвецкая, Осипов, Павлов
МПК: G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...6 обработки и программного управления поочередно подключает датчики 11 к входу АЦП 5, с выхода которого информация о величине напряженности поля в отрезке микрополосковой линии ных составляющих светового луча (необыкновенный луч) приобретает Фазо- .вьй сдвиг, онределяемый выражением 2, 2 2= 1 с 11 .з 1 п - й + 1 с 11 з 1 п1 Ъ1 Таким образом, в режиме калибровки устанавливается длина удлинителя 13 аптического пути, равная 11=(И + - ). В этом случае вышедший8из подложки отрезка микрополосковой линии 2 луч имеет сдвиг Фазы необыкновенного луча, пропорциональный квадрату амплитуды поля в данном сечении отрезка микрополосковой линии 2 и независящий от времени. Отградуировав предварительно устройство, изменяющее длину оптического пути...
Предыдущий патент: Устройство для фиксации перехода периодического сигнала через нулевое значение
Следующий патент: Устройство для форсированного включения электромагнитного механизма
Случайный патент: Устройство управления песочницей локомотива