Способ управления однообмоточным двигателем колебательного движения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
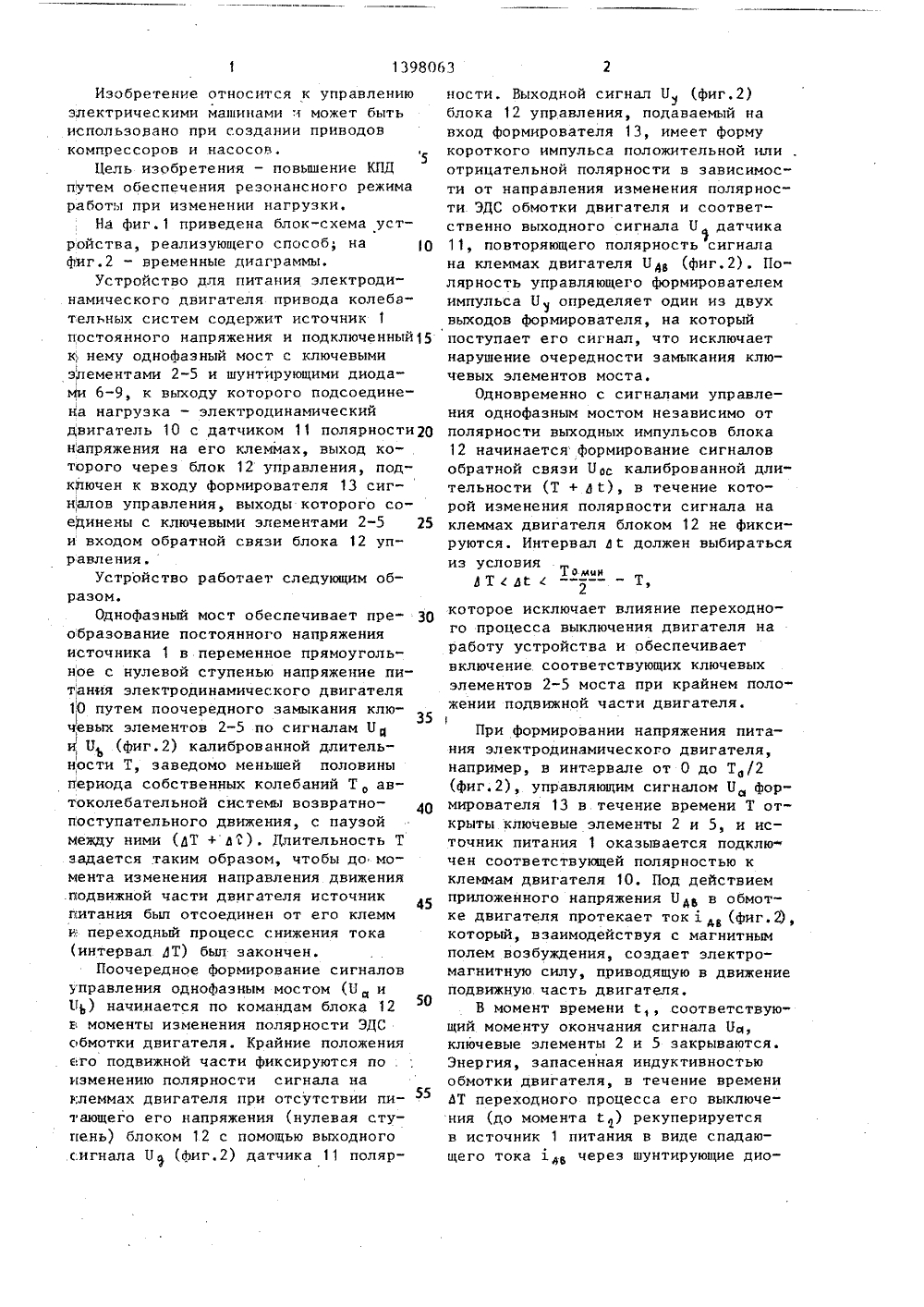
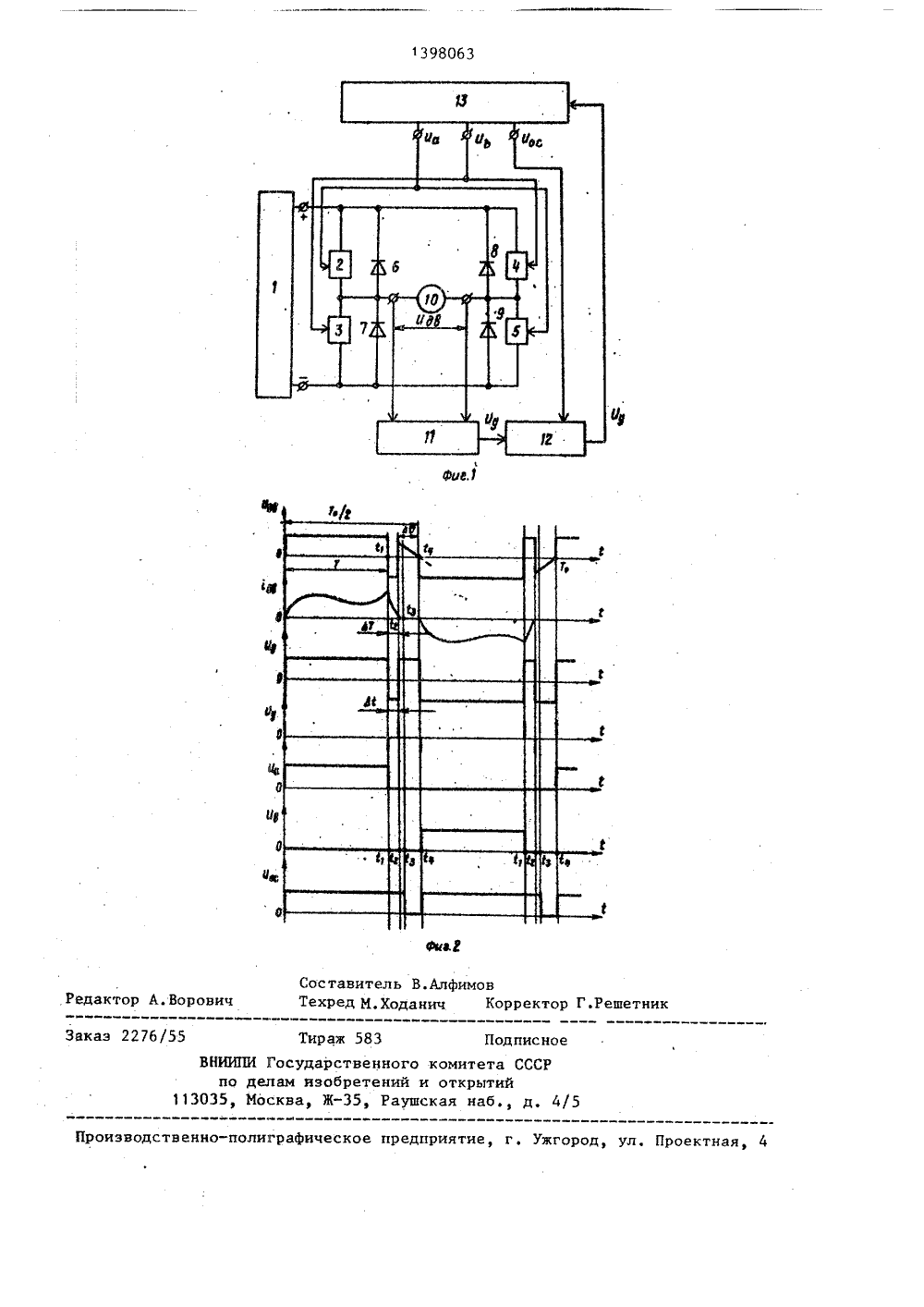
Изобретение относится к управлению электрическими машинами и может быть использовано при создании приводов компрессоров и насосов.Цель изобретения - повышение КПД путем обеспечения резонансного режима работы при изменении нагрузки.На Фиг. 1 приведена блок-схема устройства, реализующего способ; на Фиг.2 - временные диаграммы.Устройство для питания электродинамического двигателя привода колебательных систем содержит источник 1 постоянного напряжения и подключенный 15 к; нему однофазный мост с ключевыми элементами 2-5 и шунтирующими диодами 6-9, к выходу которого подсоединена нагрузка - электродинамический двигатель 10 с датчиком 11 полярности 20 напряжения на его клеммах, выход которого через блок 12 управления, подключен к входу формирователя 13 сигналов управления, выходы которого соеДинены с ключевыми элементами 2-5 25 и входом обратной связи блока 12 управления.Устройство работает следующим образом.Однофазный мост обеспечивает пре образование постоянного напряжения источника 1 в переменное прямоугольное с нулевой ступенью напряжение питания электродинамического двигателя 10 путем поочередного замыкания ключевых элементов 2-5 по сигналам П 4 и Б 1, (фиг.2) калиброванной длительности Т, заведомо меньшей половины периода собственных колебаний Тав" токолебательной системы возвратно поступательного движения, с паузой между ними (ДТ + а ), Длительность Т задается .таким образом, чтобы до момента изменения направления движения .подвижной части двигателя источник питания был отсоединен от его клемм и переходный процесс снижения тока (интервал дТ) был закончен.Поочередное формирование сигналов управления однофаэным мостом (Би б) начинается по командам блока 12 в моменты изменения полярности ЭДС обмотки двигателя. Крайние положения его подвижной части фиксируются по . изменению полярности сигнала на клеммах двигателя при отсутствии питающего его напряжения (нулевая ступень) блоком 12 с помощью выходного сигнала Б (фиг.2) датчика 11 поляр 9 ности. Выходной сигнал Ц (фиг.2) блока 12 управления, подаваемый на вход формирователя 13, имеет форму короткого импульса положительной или отрицательной полярности в зависимости от направления изменения полярности ЭДС обмотки двигателя и соответственно выходного сигнала П датчика 11, повторяющего полярность сигнала на клеммах двигателя Ц 4 н (фиг.2). Полярность управляющего формирователем импульса Б определяет один из двух выходов формирователя, на который поступает его сигнал, что исключает нарушение очередности замыкания ключевых элементов моста.Одновременно с сигналами управления однофазным мостом независимо от полярности выходных импульсов блока 12 начинается формирование сигналов обратной связи 00 с калиброванной длительности (Т + 4 ), в течение которой изменения полярности сигнала на клеммах двигателя блоком 12 не фиксируются. Интервал 4 1 должен выбираться из условияТдмцнЬТ(а ( которое исключает влияние переходного процесса выключения двигателя наработу устройства и обеспечиваетвключение соответствующих ключевыхэлементов 2-5 моста при крайнем положении подвижной части двигателя,При формировании напряжения питания электродинамического двигателя,например, в интервале от 0 до Т/2(Фиг.2), управляющим сигналом ц формирователя 13 в течение времени Т открыты ключевые элементы 2 и 5, и источник питания 1 оказывается подключен соответствующей полярностью кклеммам двигателя 10. Под действиемприложенного напряжения Б 4 в обмотке двигателя протекает ток х(фиг. 3,который, взаимодействуя с магнитнымполем возбуждения, создает электромагнитную силу, приводящую в движениеподвижную. часть двигателя,В момент времени , соответствующий моменту окончания сигнала Бд,ключевые элементы 2 и 5 закрываются.Энергия, запасенная индуктивностьюобмотки двигателя, в течение времениЬТ переходного процесса его выключения (до момента й) рекуперируетсяв источник 1 питания в виде спадающего тока 14 через шунтирующие дио980634бильность рабочих и энергетическиххарактеристик колебательных систем,поскольку обеспечивает устойчивую работу в резонансном режиме, поддерживая равенство частот питающего напряжения и собственных колебаний системы в широком диапазоне изменений нагрузки, нагряжения источника питания 1 р и условий окружающей среды, При неизменных величинах напряжения питания 3 13 ды 7 и 8. Напряжение на клеммах двигателя при этом дважды (в моменты иначала и окончания переходного процесса) меняет свою полярность. Сигналы об этом с датчика 11 полярности блоком 12 управления не фиксируются (импульсы Бна фиг.2, показанные пунктирными линиями), посколь" ку последний блокирован сигналом обратной связи О формирователя 13 домомента 1В момент времениток двигателя спадает до нуля. Поскольку подвижная часть двигателя продолжает движение в магнитном поле возбуждения, на интервале В 2 он работает как генератор полярность ЭДС обмотки которого 1(фиг.2) повторяется выходным сигналом датчика 11, а моментее изменения, о соответствующий крайнему положению подвижной части двигателя, фиксирует ся блоком 12.Под воздействием импульса управления Б в момент времени 1 на выходах 25 формирователя 13 появляются сигналы открытия ключевых элементов 3 и 4 и сигнал обратной связи для блока 12, Полярность подключения источника питания к клеммам двигателя оказывается ЗО противоположной, и его подвижная часть начинает движение к другому крайнему положению. Последующий про. цесс формирования напряжения питания электродинамического двигателя в интервале времени от Т /2 до То аналогичен описанному, и далее все процессы в схеме периодически повторяются.Таким образом, обеспечивается фиксация моментов достижения крайних по О ложений подвижной частью электродинамического двигателя и подключение в эти моменты источника питания к клем-. мам двигателя с поочередно изменяющейся полярностью.45Предлагаемый способ управления повышает по сравнению с известным стадвигателя электродинамического компрессора и степени сжатия рабочего тела отклонение частоты питающего напряжения от частоты собственных колебаний системы лишь на 47 приводит к увеличению потребляемой мощности на 803 и снижению производительности агрегата на 307, Эти потери устраняются при использовании предлагаемого способа,Отсутствие необходимости в датчиках крайних положений для реализации предлагаемого способа позволяет повысить надежность систем возвратно-поступательного движения, а введение нулевой ступени в форму питающего напряжения улучшает его гармонический состав и характеристики привода. Формула изобретения Способ управления однообмоточным двигателем колебательного движения, включающий периодическое изменение полярности питающего напряжения, о тл и ч а ю щ и й с я тем, что, с целью повышения КПД путем обеспечения резонансного режима работы при изменении нагрузки, в каждом полупериоде изменения питающего напряжения прерывают питание обмотки двигателя, после прекращения тока обмотки измеряют ЭДС на обмотке, фиксируют момент изменения ее знака и в этот момент включают питание обмотки напряжением противоположной полярности.1398063 Составитель В.АлфимТехред М.Ходанич актор А.Ворович орректор Г.Решетник каз 2276/5 583 НИИПИ по д113035, М Производственно-полиграфическое предприятие, г, Ужгород,Проектная Тираж осударственно ам изобретении ква, Ж, Ра Подписноекомитета СССРи открытийская наб д, 4/5
СмотретьЗаявка
4155429, 02.12.1986
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ ИМ. СЕРГО ОРДЖОНИКИДЗЕ, ПРЕДПРИЯТИЕ ПЯ Г-4371
ГЕРШБЕРГ ВАЛЕРИЙ СЕМЕНОВИЧ, БУЯКОВ АЛЕКСЕЙ ЛЕОНИДОВИЧ, ВОЛЬСКИЙ СЕРГЕЙ ИОСИФОВИЧ, ФЕДОРОВ ВИКТОР КОНСТАНТИНОВИЧ, ОБЕРТУН ОЛЕГ СТЕПАНОВИЧ
МПК / Метки
МПК: H02K 33/02, H02P 7/62
Метки: двигателем, движения, колебательного, однообмоточным
Опубликовано: 23.05.1988
Код ссылки
<a href="https://patents.su/4-1398063-sposob-upravleniya-odnoobmotochnym-dvigatelem-kolebatelnogo-dvizheniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления однообмоточным двигателем колебательного движения</a>
Система управления очистным комбайном и скребковым конвейером

Номер патента: 1481397
Опубликовано: 23.05.1989
Авторы: Агранат, Аккерман, Быковский, Кибрик, Юргилевич
МПК: E21C 35/24
Метки: комбайном, конвейером, очистным, скребковым
...электродвигателя.Система работает следующим образом.Команда на запуск очистного комбайна и скребкового конвейера подается с кнопочного поста 1 управления.5 148139 При этом блок 2 управления обеспечивает включение устройства 3 звуковой сигнализации, в результате чего подается предупредительный сигнал. После этого включаются магнитные пускатели 4 и 5 комбайна и скребкового конвейера и происходит запуск электродвигателей 6 и 7 комбайна и скребкового конвейера. 10Если на конвейере находятся негабаритные предметы, например куски породы, размеры которых превышают допустимую высоту, прохождения грузапод комбайном, при их подходе к дат чику 9 негабаритов, последний срабатывает и выдает команду на отключение электродвигателей скребкового...
Формирователь сигналов с заданным законом изменения фазы

Номер патента: 1385239
Опубликовано: 30.03.1988
Авторы: Жаров, Кочемасов, Раков, Ревун, Соболев
МПК: H03C 3/00
Метки: заданным, законом, изменения, сигналов, фазы, формирователь
...14. С выхода каждого из ннх поступает либо прямой, либо инвертированныи код.В первом квадратурном канале сигнал управления инверсией, поступающийс выхода блока 8, является также старшим разрядом кода сигнала и поступаетна вход старшего разряда регистра 4памяти. То же самое происходит и вовтором квадратурном канале (сигнал свыхода блока 8 поступает на входстаршего разряда регистра 15 памяти.В случае, если число преобразова"телей 2, - 2кодов является степеньюдвойки, т.е. Х = 2, р = 2,3,4,блок 8 упрощается: реверсивный счетчик 28 становится двоичным и можнообъединить функции реверсивных счет-чиков 28 и 29 и делителя 30 частоты,как показано на фиг. Зб. В этом случае реверсивный счетчик 28 имеет емкость 2 , а один из входов...
Способ восстановления стереофонического цифрового сигнала, закодированного кодом, обнаруживающим блоки ошибок длительностью не более n символов

Номер патента: 1555884
Опубликовано: 07.04.1990
Авторы: Гитлиц, Добровольский, Зеленин, Попов, Худяков
МПК: H04H 5/00
Метки: блоки, более, восстановления, длительностью, закодированного, кодом, обнаруживающим, ошибок, сигнала, символов, стереофонического, цифрового
...Фронта сигнала на первом входе появляется через время, равное разности максимальной и фактической длительности блока ошибок.Кроме того, входной сигнал. поступает на первый (второй) блок 7 (8), в котором он задерживается на время максимальной длительности блока оши 55 бок, увеличенное на период следования кодовых слов, с выхода этого блока задержанный сигнал поступает как на первый информационный вход первого (второго) блока 11 (12), так и на вход третьего (четвертого) блока 9 (10).В третьем (четвертом) блоке 9 (10) задержанный сигнал дополнительно задерживается на время периода следования кодовых слов, С выхода третьего (четвертого) блока 9 (10) сигнал поступает на информационный вход первого (второго) блока 13 (14), на управляющий...
Формирователь импульсов в момент экстремумов сигнала инфранизкой частоты

Номер патента: 1647429
Опубликовано: 07.05.1991
Авторы: Селезнев, Сологуб, Усов
МПК: G01R 19/04
Метки: импульсов, инфранизкой, момент, сигнала, формирователь, частоты, экстремумов
...3 - 1 и 3 - 2 продетектированные сигналы появляются немного раньше и благодаря большой постоянной времени разряда создают к моменту максимума напряжения на выходе первой ячейки 2-1 согласования и к моменту минимума на выходе второй ячейки 2-2 согласования соответственно положительное и отрицательное напряжение,равное амплитуде сигнала, Это напряжение удерживается в течение полупериода до момента сброса, определяемого моменгом экстремума противоположного знака,Поскольку входной сигнал от нулевого знацения и до момента достижения амплитудного значения передается на входы компараторов с одинаковым коэффициентом передачи, то случайные изменения напряжения на одном из входов компаратора могут вызвать его ложное срабатывание. Кроме...
Устройство формирования сигнала управления фазовым положением блока вращающихся головок

Номер патента: 1277190
Опубликовано: 15.12.1986
МПК: G11B 5/48
Метки: блока, вращающихся, головок, положением, сигнала, фазовым, формирования
...которым одновибратор 7 переводится в состояние, при котором на его выходе устанавливается сигнал логической единицы. При несовпадении воспроизведенных и стробирующих импульсов сигналлогической единицы устанавливаетсяна выходе одновибратора 8,.при этомна входах элемента ИЛИ 12 устанавливаются сигналы логического нуля и навыходной шине 14 Формируется сигналкоманды на фазирование блока вращающихся головок, При совпадении воспроизведенных и стробирующих импульсов сигналом логической единицы свыхода одновибратора 7 через элементИЛИ 12 на вьгходной шине 14 формируется сигнал команды на прекращениеФаэирования блока вращающихся головок. При выпадении импульсов цветовой синхронизации в воспроизведенном сигнале на выходах одновибраторов 7 и 8...
Предыдущий патент: Способ управления машиной двойного питания
Следующий патент: Усилитель мощности
Случайный патент: Устройство для бурения скважин