Электропривод с выравниванием нагрузок
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
(5)4 Н 02 Р 7/68 ОПИСАНИЕ ИЗОБРЕТЕНК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(54)(57) ЭЛЕКТРОПРИВОД С ВЫРАВНИВАНИЕМ НАГРУЗОК, содержащий электродвигатели, первый сумматор, связанный с первым усилителем мощности,выход которого подключен к якорнойобмотке первого электродвигателя,датчик скорости первого электродвигателя, выходом подключенный квходу первого сумматора, датчик момента первого электродвигателя, выход которого подключен к входампервого суммирующего усилителя ипервого сумматора соответственно,второй сумматор, связанный с вторымусилителем мощности, выход которогоподключен к якорной обмотке второго электродвигателя, датчик моментавторого электродвигателя, выход 801179515 А которого соединен с вторым входом первого суммирующего усилителя, измеритель угла рассогласования, входы которого соединены с выходом задатчика входного сигнала и датчиком угла поворота вала нагрузки, соединенным через редукторы с люфтом с валами электродвигателей, о т л и ч а ю щ и й с я тем, что, с целью повышения КПД путем выравнивания моментов нагрузки, в него дополнительно введены два релейных регулятора, два датчика напряжений и второй суммирующий усилитель, при этом вход первого релейного регулятора соединен с выходом первого сумматора, а выход - с входом первого усилителя мощности, вход второго релейного регулятора соединен с выходом второго сумматора, а выход - с входом второго усилителя мощности, выходы суммирующих усилителей соединены с входом второго сумматора, к входам второго суммирующего усилителя подключены ,выходы датчиков напряжения первого и второго электродвигателей, к входу первого сумматора подключен также выход датчика напряжения первого электродвигателя.45 1 117951Изобретение относится к электро" технике и может быть использовано для регулирования моментов двух .электродвигателей в электромеханических следующих системах. 5Целью изобретения является повышение КПД путем выравнивания моментов нагрузки.На чертеже представлена схема предлагаемого электропривода. ФОЭлектропривод содержит электродвигатели 1 и 2, последовательно соединенные первый сумматор 3, релейный регулятор 4, усилитель мощности 5, выход которого подключен .к 15 якорной обмотке электродвигателя 1, последовательно соединенные второй сумматор 6, релейный регулятор 7, усилитель мощности 8, выход которого подключен к якорной обмотке 20 электродвигателя 2, валы электродвигателей 1 и 2 через редукторы 9 и 10 соединены с валом нагрузки 11,датчик скорости 12 электродвигателя 1 соединен с входом первого суммато ра 3, выход датчика момента 13 электродвигателя 1 подключен к входам первого сумматора 3 и суммирующего усилителя 14, выход датчикаФ момента 15 электродвигателя 2 соединен с вторым входом первого суммирующего усилителя 14, выходы датчиков напряжений 16 и 17 подключены к входам второго суммирующего усилителя 18, выходы суммирующих уси-З 5 лителей 14 и 18 подключены к входу второго сумматора 6, выход датчика напряжений 16 подключен также к входу первого сумматора 3, измеритель угла рассогласования 19, вхо ды которого соединены с выходом задатчика входного сигнала 20 и .датчиком угла поворота 21 вала нагрузки. Электропривод с выравниваниемнагрузок электродвигателей работает следующим образом,В исходном положении приводныеэлектродвигатели 1 и 2 неподвижны.Если при этом отсутствует разностьсигналовзадания положения ваЪла нагрузки 11 объекта регулирования и 1 фактического положенияэтого вала на входе сумматора 3, торелейный регулятор 4 устанавливается 55з одно из устойчивых положений,выдавая на вход усилителя мощности5 максимальное напряжение управления 5 2при этом усилитель мощности 5 также имеет на выходе максимальное напряжение. Увеличение напряжения на выходе усилителя мощности 5 ведет к появлению сигнала на выходе датчика напряжения 16 Этот сигнал поступает с отрицательным знаком на вход сумматора 3, что ведет к переключению релейного регулятора 4 в другое положение, при котором усилитель мощности 5 также имеет на выходе напряжение обратной полярности. Это в свою очередь вызывает изменение знака выходного напряжения на датчике 16 напряжения и т,д. Таким образом, при отсутствии разности сигналов У -релейный регулятор 4 и усилитель мощности 5 переключаются из одного устойчивого положения в другое с высокой частотой, т.е. работают в скользящем режиме.Переключение полярности напряжения на выходе датчика 16 с частотой скольжения вызывает появление скользящего режима работы релейного регулятора 7 и усилителя мощности 8 через второй суммирующий усилитель 18 и датчик напряжения 17.Скважность напряжения питания каждого электродвигателя 1 и 2 в этом случае равна 0,5, а среднее напряжение О,.и 0 на их якорях равно нулю, что обеспечивает их неподвижность и нагрузки 11. При появлении на входе сумматора 3 положительной разности У - У изменяется скважность напряжения на выходе релейного регулятора 4 и усилителя мощности 5, что ведет к увеличению среднего напряжения О, на электродвигателе 1, который начинает развивать вращающий момент, передаваемый через редуктор 9 нагрузке 11.Повышение среднего напряжения 01 на электродвигателе 1,через датчик напряжения 16 и второй суммирующий усилитель 18 вызывает изменение скважности напряжения на выходе релейного регулятора 7 и напряжения Ц на выходе усилителя мощности 8, электродвигатель 2 также начнет развивать вращающий момент, передаваемый на нагрузку 11 объекта регулирования через редуктор 10.Движение электродвигателя 1 и 2 продолжается до тех пор, пока нагрузка 11 объекта регулирования не1179515 1 О 20 25 30 повернется на заданный угол и сигнал 1 . на выходе датчика угла по.ворота 21 вала нагрузки объекта регулирования не будет равен сигналу У на выходе задатчика 20 входного сигнала.Вращающие моменты М,и М электродвигателей 1 и 2 контролируются. датчиками моментов 13 и 15 соответственно. Сигналы с выхода этих датчиков сравниваются в суммирующем усилителей 14, на выходе которого формируется сигнал ьМ , пропорциональный разности моментов Ю 1 и М т.е. МК,(М, М ),В процессе работы электродвигателей 1 и 2 контролируется скорость электродвигателя 1, сигнал от датчика 12 скорости поступает с отрицательным знаком на вход первого сумматора 3.Таким образом, устройство для выравнивания нагрузок электродвигателей работает реализуя следующие алгоритмы управления:для электродвигателя 1 0,.0 м фф 1 Ч Кс 1-Км М-Кн(1) (1) для электродвигателя 2 О 1 ф 1 макс 6 ф (тм ь М ",н д 1 1 (2)где И, М, Ц - соответственно скорость, момент и напряжение электродвига-телей. 4Составляющая 11 0 в алгоритме (1) обеспечивает работу релейного регулятора 4 в скользящем режиме, а составляющие Кс йи К м М( устойчивое движение электродвигателя при отработке сигнала Ь(,Составляющая К а О в алгоритме(2) обеспечивает работу релейногорегулятора 7 в скользящем режиме,стремясь свести движение электродвигателя 2 с вращающим моментомМ : М 1, т.е. при а М - ф О,Повышение коэффициента полезного действия в электроприводе обеспечивается введением релейных регуляторов 4 и 7, работающих в скользящем режиме при подаче на их входы определенных обратных связей в соответствии с алгоритмами управления (1) и (2). При отклонении параметров любого из электродвигателей, например, из-за технологического разброса при их изготовлении, разной температуры нагрева или других причин вследствие больших коэффициентов усиления при скользящем режиме работы регуляторов возникающая разность дМ вращающих моментов вызывает такое изменение напряжения Й питания второго электродвигателя, при котором величина Ь М уменьшается, стремясь к минимальной величине, определяемой реальной частотой скользящего режима работы ре- . пейных регуляторов.1179515 Составитель М.КряхтуноваРедактор Т МитейкоТехред М.Пароцай Корректор С.Черни Подпи Заказ 5693/5 оеР Филиал ППП "Патент", г, Ужгород Проектная, 4 Тираж б 4 б .НИИПИ Государс по делам изоб 13035, Москва вени етен Ж-З о комитета С и открытий Раушская н
СмотретьЗаявка
3705734, 02.03.1984
КОММУНАРСКИЙ ГОРНО-МЕТАЛЛУРГИЧЕСКИЙ ИНСТИТУТ
ДОМНИН АЛЕКСАНДР НИКОЛАЕВИЧ, ЗЕЛЕНОВ АНАТОЛИЙ БОРИСОВИЧ, РЯБЕНКО ЛЕОНИД ИВАНОВИЧ, САДОВОЙ АЛЕКСАНДР ВАЛЕНТИНОВИЧ, СУХИНИН БОРИС ВЛАДИМИРОВИЧ
МПК / Метки
МПК: H02P 7/68
Метки: выравниванием, нагрузок, электропривод
Опубликовано: 15.09.1985
Код ссылки
<a href="https://patents.su/4-1179515-ehlektroprivod-s-vyravnivaniem-nagruzok.html" target="_blank" rel="follow" title="База патентов СССР">Электропривод с выравниванием нагрузок</a>
Устройство для тепловой защиты электродвигателя

Номер патента: 1001295
Опубликовано: 28.02.1983
Авторы: Кузьмин, Новиков, Шошмин
МПК: H02H 7/085
Метки: защиты, тепловой, электродвигателя
...с выходом теплового аналога, электродвигателя.На чертеже представлена блок-схема предлагаемого устройства для тепловой защиты электродвигателя.Устройство для тепловой защиты 10 электродвигателя содержит последовательно соединенные датчик 1 тока, квадратор 2, сумматор 3, тепловой аналог 4 электродвигателя и исполнительный орган 5. Выход исполнитель ного органа 5 является выходом устройства. Датчик 1 тока включен в силовую цепь электродвигателя.Тепловой аналог 4 электродвигателя охвачен положительной обратной связью 70 с помощью блока б перемнокения и пропорционального звена 7, При этом выход блока б перемножения соединен с вторым входом сумматора 3, а входы соответственно с выходом квадрато ра 2 и выходом пропорционального звена 7. Вход...
Преобразователь угла поворота вала в код

Номер патента: 1392616
Опубликовано: 30.04.1988
Автор: Чибухчян
МПК: H03M 1/24
Метки: вала, код, поворота, угла
...27, на второй вход которого подается сигнал с выхода коммутатора 22 (фиг,2 г), На выходе компаратора 27 формируется сигнал (фиг,2 е) прямоу гольной формы, сдвинутый относительно второго разряда выходного кода на45 О, так как 111,ю.п 61= 0,707 Ндля значений улов 45, 135, 225и 315Второй разряд с выхода нуль-органа 17 и сигнал с выхода компаратора27 поступают ца входы сумматора 20по морулю два, ца вьгходе которого формируется третий разряд выходногокода (фиг.2 ж), Сигналы с выходов коммутаторов 21 и 22 поступают ца входы коммутатора 23, а напряжения свыходов делителей 25 и 26 напряжения - на входы коммутатора 24, Науправляющие входы коммутаторов 23 и24 поступает сигнал с выхода компаратора 27 (фиг.2 е). Управление коммутатором 23...
Система адаптивного управления параметром технологического процесса
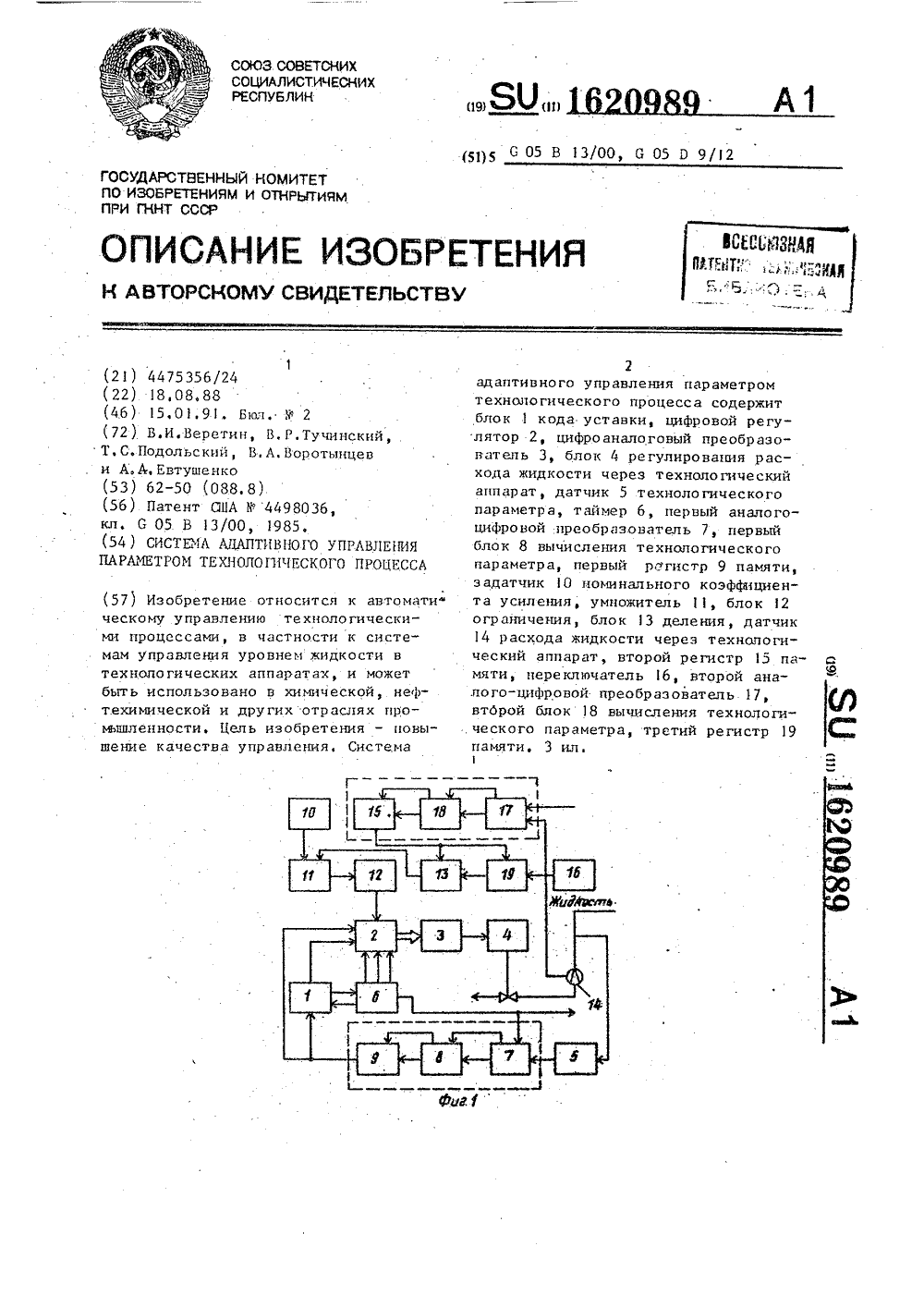
Номер патента: 1620989
Опубликовано: 15.01.1991
Авторы: Веретин, Воротынцев, Евтушенко, Подольский, Тучинский
МПК: G05B 13/00, G05D 9/12
Метки: адаптивного, параметром, процесса, технологического
...КЯБ ("Больше", "Меньше"), Зти сигналы совместно с кодом1 К, который поступает с выхода регистра, подаются на выход регулятора2, В пятом такте работы системы поФронту сигнала с пятого выхода тайме ра 6 происходит запись новой инФорма ции в регистр 37, где она сохраня 50 . ется в течение цикла Ть, Цифроанало" говый преобразователь 3 осуществляет преобразование кодовых сигналов с выхода регулятора 2 в аналоговый сигнал постоянного тока, При одновременном поступлении на вход циФроаналогового.55 преобразователя 3 сигналов "Больше" и ,%3 или "Меньше" и ДИУ выходной аналоговый сигнал цпТ, 1 соответствен",но увеличивается или уменьшается пропорционально коду Б:ппт,1 щц п)т,)А ьБпт 1, (7) где У(п)Т 1 - величина управляюьщего воздействия...
Кольцевой дешифратор

Номер патента: 342298
Опубликовано: 01.01.1972
Автор: Сенников
МПК: H03M 13/15
Метки: дешифратор, кольцевой
...схема кольцевого дешифратора, построенного на основе кольца безизбыточного кода - 01110100 - , Устройство содержит восьми- разрядный кольцевой регистр, построенный из ячеек 17 - 24; схему считывания, состоящую из двухвходовых схем совпадения 25 - 33; шину нулевого сигнального признака 34, шину единичного сигнального признака 35, шину разрешения исполнения 3 б, шину сигнала ошибки 37, выходные шины 38 - 45. Выходы ячеек регистра разбиты на две группы, Первую группу составляют выходы ячеек 17, 19, 21, 22, соответствующие входным последовательностям с четным числом единиц, вторую - выходы ячеек 18, 20, 23, 24, соответствующие входным последовательностям с .нечетным числом единиц. Сигналы с выходов первой группы подаются на...
Устройство для контроля логических узлов

Номер патента: 968816
Опубликовано: 23.10.1982
Авторы: Богданов, Маслеников, Светников, Чибисов, Шалимов
МПК: G06F 11/16
Метки: логических, узлов
...7 в накапливающем сумматоре 8 контроля логических блоков, зависит образуется контрольная сумма, которая от внутренней структуры этих блоков; сравнивается с эталонной суммой, полу- Чем она сложнее; чем большее количест. ченной для исправного логического уз-во кодов требуется для контроля. ла, аналогично проверяемому узлу, Ес- Блок 6 управления формирует сигна". ли контрольная сумма совпадает с эта- лы управления для блока 1 формировалонной, проверяемый логический узел ния контрольного числа, регистра 2 и считается исправным.В противном слу" генератора 5 псевдослучайных кодов и чае логический узел считается неис ф работает следующим образом. правным. Как и все блоки устройства, блокДля достижения повторяемости .ре управления перед началом...
Предыдущий патент: Вибрационный электропривод
Следующий патент: Цифровой усилитель мощности
Случайный патент: Вентильный электродвигатель