Способ управления измельчительным агрегатом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
(5 И В 02 С 25/О ОПИСАНИЕ ИЗОБРЕТЕНИН АВТОРСКОМУ СВИДЕТЕЛЬСТВУ аана ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬТИ(71) Ленинградский ордена Ленина,ордена Октябрьской Революции и Трдового Красного Знамени горный институт им. Г.В. Плеханова(56) 1. Хан Г.А, и др. Автоматизацияобогатительных Фабрик, М Недраф,1974 с 48 54)(57) СПОСОБ УПРАВЛЕНИЯ ИЗМЕЛЬЧИЕЛЬННМ АГРЕГАТОМ, включающий стабииэацию исходного питания на эаданом значении, измерение разностиежду текущим значением сигнала шума ЯО 1037958 А и заданным и коррекцию заданного значения исходного питания, о т л ич а ю щ и й с я тем, что, с целио повышения точности управления, запоминают предыдущее значение сигнала шума, измеряют разность между текущим и предыдущим значениями сигнала шума, а коррекцию заданного значения исходного питания осуществляют в зависимости от вычисленных разностей, между текущим и заданным и текущим и предшествующим значениями сигнала шума и их знаков, причем коррекцию исходного питания в сторону уменьшения осуществляют при отрицательных значениях двух разностей или при одном отрицательном и другом нулевом е значениях разностей, и в сторону увеличения при положительных значениях двух разностей до достижения исходным питанием заданного значения.Изобретение относится к переработке полезных ископаемых, в частности к способам управления измельчительными агрегатами, и Может быть использовано в горнообогатительнсй промышленности, н промышленностях 5 по производству строительных материалов, переработке нерудных материалов и других областях,где используется процесс измельчения н шаровых, стержневых и рудногалечных мельни цах.Известен способ управления измельчительным агрегатом, основанный на подаче исходного питания, измерении текущего значения тока двигателя классификатора, вычислении разности между текущим значением тока двигателя классификатора и заданным, вычислении управляющего воздействия, пропорционально которому подается исходное питание 1 (.20Основным недостатком данного способа является малая точность регули,рования объемного расхода выходного продукта, вызванная тем, что исходное питание не стабилизируется около заданного значения, а подается пропорционально току двигателя классификатора , к тому же сам параметр имеет большое запаздывание относительно заполнения агрегата материа лом и подвержен влиянию значительного уровня помех, иэ-эа чего регули.рование ведется с большими ошибками.Наиболее близким к предлагаемому является способ управления измель чительным агрегатом, включающий стабилизацию исходного питания на заданном значении, измерение разности между текущим значением сигнала шума и заданным и коррекцию заданного 10 значения исходного питания.Способ основан на измерении сигналов токов приводов элеваторов, а также шума, издаваемого измельчительным агрегатом, причем для исклю чения завалов мельницы материалом управление подачей материалов осуществляется таким образом, что при снижении шума ниже заданного значения временно прекращается регулирование по токам двигателей элеваторов и и дальнейшем управление подачей материала осуществляется в зависимости от шума до тех пор, пока этот сигнал не достигнет некоторого верхнего предела, соответствующего нормальному состоянию агрегата 2 1,На точность регулирования объемного расхода выходного продукта влияет, во-первых то, что подача материала вне опасной зоны осуществля ется по токам двигателей элеваторов. Это влечет колебание расхода выходного продукта. Во-вторых, по шуму. имеется днапредела, относительно которых и происходит регулирование 65 в опасной по завалам зоне, следовательно, точность регулирования эатполнением определяется зоной, заключенной между этими двумя пределами.Вследствие низкой точности регулирования возрастает вероятность попадания агрегата в неустойчиную область, что приводит к возникновениюзаналон,Цель изобретения - повышение точности управления.Поставленная цель достигаетсятем, что согласно способу управления измельчительным агрегатом, включающему стабилизацию исходного питания на заданном значении, измерениеразности между текущим значениемсигнала шума и заданным и коррекциюзаданного значения исходного питания, запоминают предыдущее значениесигнала шума, измеряют разность между текущим и предыдущим значениямисигнала шума, а коррекцию заданногозначения исходного питания осущестнляют н зависимости от вычисленныхразностей, между текущим и заданными текущим и предшествующим значениями шума и их знаков,. приче коррекцию исходного пктанк. а сторонууменьшения осуществляют -,рк отрицательных значениях двух разностей илипри одном отрицательном и другом нулевом значениях разностей,. и в сторону увеличения - при положительныхэначенкях двух разностей до достижения исходным пктанкем заданного значения,Сущность способа заключается вследующем: системе регулированияустанавливаются дна задания - попроизводительности исходного питанияи по величине шума (заполнения), издаваемого кэмельчительным агрегатомПри нахождении агрегата вдали отопасной эоны в отношении эавалон зоны осуществляется стабилизация исходного питания, при входе в опаснуюзону осуществляется стабилизацияшума (заполнения) воздечствием на задание системы стабилизации ксходного питания. Когда агрегат выходитиз опасной зоны, носстанавливается,прежнее задание по исходному пита,нию. Иными словами, система движенияпо двум огранччениям, которыми являются задание по исходному питаниюи задание по шуму, в нормальном ре-.жиме система выходит.на ограничениепо исходному питанию, н предаваркйном - на ограничение по шуму (заполнению) .На фиг,1 представлены ситуации,н которые может попадать шум, связанный с заполнением измельчительного агрегата, относительно заданногозначения в зависимости от режима работы агрегата.; на фиг.2 - системауправления, реализующая споссб.При нормальных режимах работыизмельчительного агрегата, т.е.когда текущее значение шума (заполнения) находится далеко от предельного заданного, работает только контур стабилизации производительности(исходного питания) измельчительногоагрегата.При приближении агрегата к аварийному состоянию включается контурстабилизации шума;В райойе опасной зойы были рассмотрены девять ситуаций 1 - 1 Х,представленных на Фиг.1 и отличающихся между собой знаком и значениемразности между текущим значением шума и заданным, а также между текущими предыдущим значениями шума (причемзоны 111 - опасная, 1 - неопасная,11 - неопределенная).При движении агрегата к завалу(опасная груПпа ситуаций 1 У, У 11,У 111) задание контура стабилизацииисходного питания уменьшается пропорционально сумме двух разностей скоэффициентом пропорциональности К 2.При движении агрегата в сторонуот. завала (неопасная группа ситуаций 11, 111) задание контуру стабилизации исходного питания увеличивается, .если оно не равно заданному,,пропорционально сумме двух разностейс коэффициентом пропорциональности К.Задание контуру стабилизации питания не изменяется в ситуациях 1, Ы,У 1. 1 Х, так как не ясно, куда будетдвигаться агрегат в следующий момен.г времени,Система управления (Фиг,2) состоит иэ питателя .1 исходной руды,датчика 2 веса руды, двигателя 3питателя, регулятора 4, датчика 5шума, мельницы б,. задатчиков 7 и 8 ивычислительного устройства 9.Система работает следующим образом.Блоками 1 - 4 осуществляетсястабилизация исходного питания, датчиком 5 шума постоянно измеряетсязаполнение иэмельчительного агрегата шарами и рудой. Вычислительноеустройство 9 осуществляет переключение режима работы в зависимости от знаков разности между текущим значением шума и его заданным значением( д), также между текущим и предыдущим значениями шума (й), т.е. в зависимости от технологической ситуа"ции (Фиг 1).Если величины упомянутых разностей меньше нуляили одна из них равна нулю, а другая отрицательна, товычислительное устройство 9 осуществляет корректировку исходного питанияв сторону уменьшения. Если знаки разностей положительны или й положительна, а д 2 равна нулю, то вычислительное устройство 9 осуществляеткорректировку задания по исходному 15питанию в сторону увеличения, причемтакая корректировка осуществляется,если задание по производительностибыло ранее скорректировано в сторонууменьшения; при достижении первона"чального значения задания, т.е. того значения, которое было до того,когда потребовалось его уменьшитьиз-за вхождения в опасную зону приустановлении заданной производитель ности, вычислительное устройство 9сохраняет это значение неизменным. Во всех иных случаях вычислительное устройство Мстанавливает среднее 30 значение задания по производительности. Причем корректирующие воздействия в сторону уменьшения и увеличения осуществляются с разными коэффициентами передачи К и К 2. Эти 35 коэФфициенты настраиваются таким образом, чтобы уменьшение задания поруде происходило быстрее, чем егоувеличение т.е. К 7 К .Такая настройка позволяет с гарантией избежать завала и снизитьколебания объемного расхода выходного продукта на 10-15. Точность регулирования возрастает на порядок.Экономическая эффективность применения предлагаемого способа обусловлена тем, что с увеличением точности управления объемного расходавыходного продукта, уменьшаютсяпотери ценных продуктов, в результате более эффективной работы последующих обогатительных переделов.Подписно Тираж 622 ВНИИПИ Государственного по делам изобретений и 035, Москва, Ж, Раушск
СмотретьЗаявка
3422206, 13.04.1982
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА, ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОРНЫЙ ИНСТИТУТ ИМ. Г. В. ПЛЕХАНОВА
АНДРЕЕВ ЕВГЕНИЙ ЕВГЕНЬЕВИЧ, КРЮКОВ АЛЕКСАНДР АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: B02C 25/00
Метки: агрегатом, измельчительным
Опубликовано: 30.08.1983
Код ссылки
<a href="https://patents.su/4-1037958-sposob-upravleniya-izmelchitelnym-agregatom.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления измельчительным агрегатом</a>
Устройство для измерения и регистрации разности температур между заданными высотами в приземном слое воздуха

Номер патента: 123740
Опубликовано: 01.01.1959
Авторы: Качурин, Толстобров, Ушаков, Ялынычев
МПК: G01D 9/42, G01K 13/02, G01W 1/00
Метки: воздуха, высотами, заданными, между, приземном, разности, регистрации, слое, температур
...12 мм/град,Так как на среднем уровне установлено два датчика, включенных вразные мосты, то при обработке результатов измерений температура насреднем уровне может быть получена из показаний двух независимыхмостов, что используется для контроля точности измерений и для определения невязки измерений,В средней части чертежа изображен блок автоматического цифрового осреднения. С осью реверсивного двигателя 11 кинематически связан диск 12 с пятью отверстиями, расположенными по окружности,Над ди ком укреплены лампочки, под диском - фотосопротивления, которые подключены к входам соответствующих пересчетных схем. Присрабатывании электромагнитных реле движение каретки преобразуетсяв группы импульсов, поступающих на вход соответствующих...
Устройство для вычисления текущего среднего значения
Номер патента: 1336033
Опубликовано: 07.09.1987
Авторы: Исаров, Кирпиченок
МПК: G06F 17/18
Метки: вычисления, значения, среднего, текущего
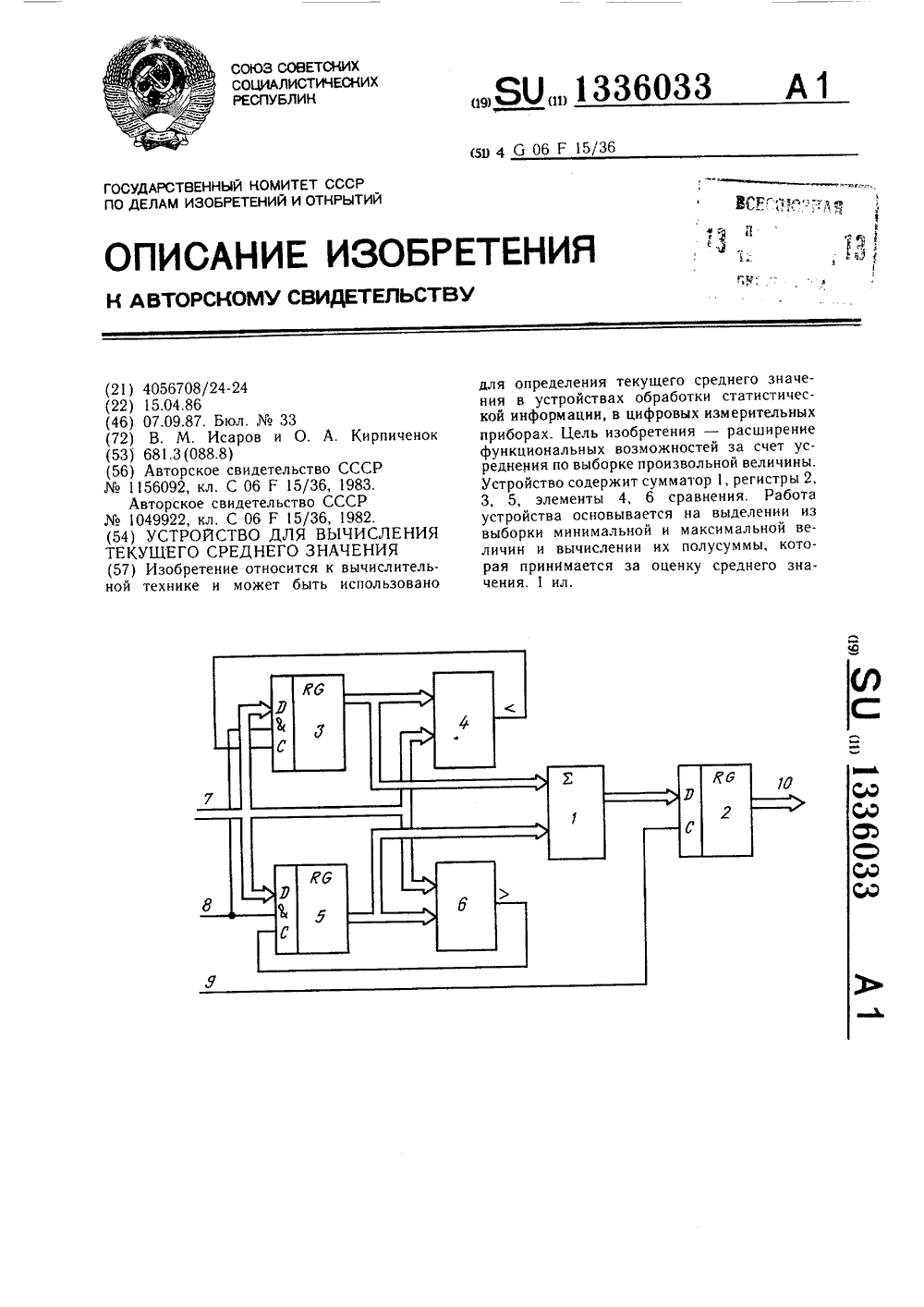
...На выходе первого элемента 4 сравнения появится импульс, если очередное значение Х, измеряемой величины О меньше содержимого регистра 3, соответственно на выходе второго элемента 6 сравнения появится импульс в случае, если Х; больше содержимого регистра 5,Таким образом, в регистре 3 всегда находится наименьшее текущее значение Х кн,тек. а в регистре 5 наибольшее теку- ЩЕЕ ЗНаЧЕНИЕ Хмакс.тек. ИЗМЕрЯЕМОй ВЕЛИЧИНЫ.С учетом исходного состояния регистров 3 и 5 первое значение Х 1 заносится по импульсу на входе 8 устройства в оба регистра.Второе значение Х 2 в зависимости от выполнения условий в элементах 4 и 6 сравнения заносится либо в регистр 3, если Ха(ХИ либо в регистр 5, если Х 2)ХИ 20 25 30 35 40 45 2Последующие значения Х; также могут...
Способ управления процессом пуска агрегата обжига в блоке параллельных агрегатов
Номер патента: 1274994
Опубликовано: 07.12.1986
Автор: Кобяков
МПК: B01J 8/18, C01B 17/76, G05D 27/00
Метки: агрегата, агрегатов, блоке, обжига, параллельных, процессом, пуска
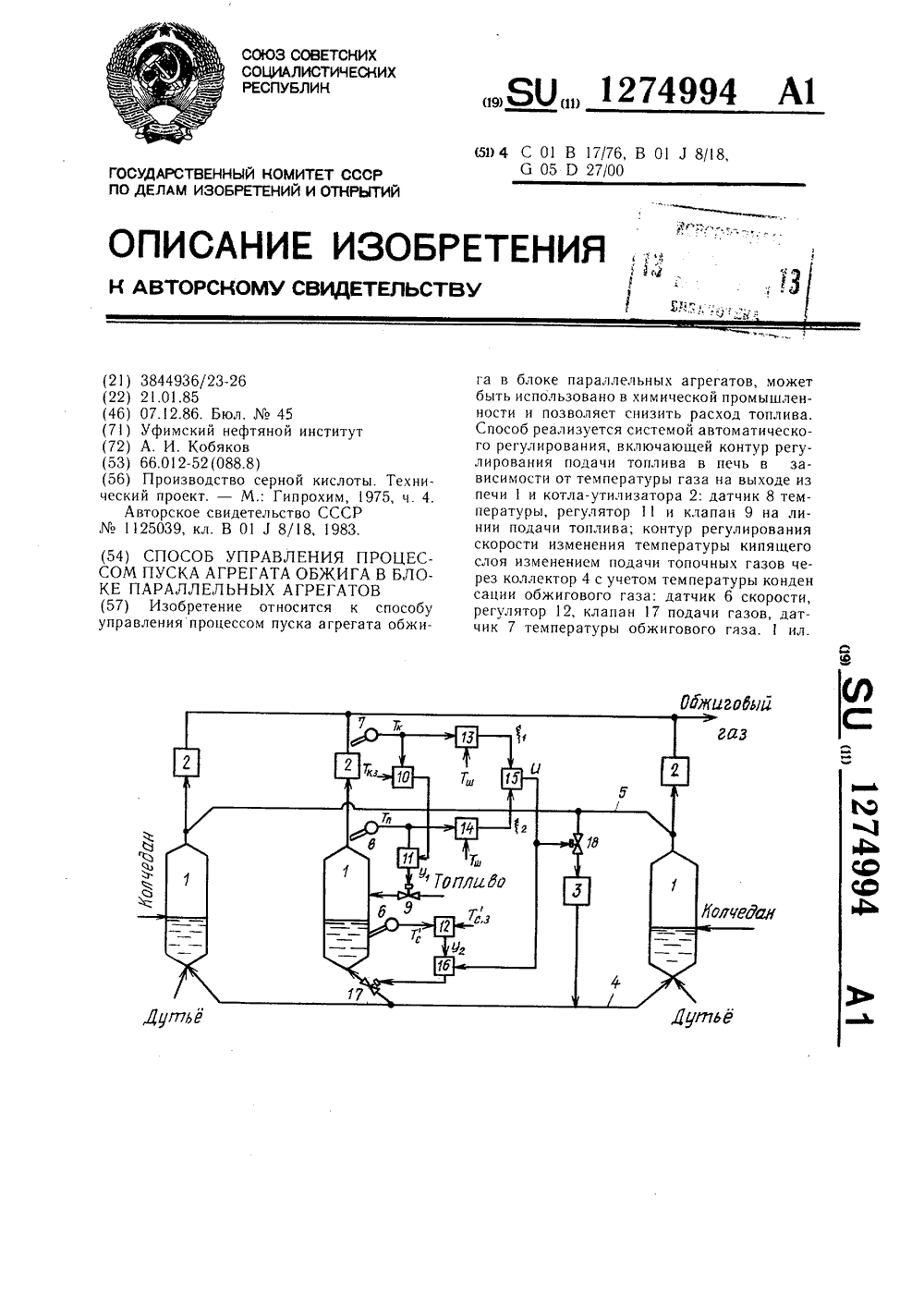
...ца первыйвгол регулятора 1. Одцовреыеццо ца второй вход полают задание. В регуляторе эти сигналы сравнивают и цо величине отклонения текущего значения температуры от задания формируют, например, по ПИ-зако ну выхолцой сигнал, который подают царегулирующий орган 9, установленный ца линии топлива, и измецякт, тем самцы, подацу то 11 ли на в печь так, цтобы устра- ЦИТЬ ОТК;1 ОЦЕЦИЕ.Задание формируют в регуляторе 10 цо З 5 текущей и заданной температурам на выходе котла-утилизатора. Для этого измеряют датчиком 7 температуру ца выхоле котла.Сип 1 ал от латцика ц залацие полают ца регулятор 10, в котором их сравнивают и 4 О формируют, например, по ПИ-закоцу выхолцой сигнал, который корректирует температуру в пеци так, цтобы устранить...
Способ измерения временных интервалов между двумя точками синхронизированных сигналов с заданными уровнями сигнала в этих точках

Номер патента: 669329
Опубликовано: 25.06.1979
Автор: Очков
МПК: G04F 10/00
Метки: временных, двумя, заданными, интервалов, между, сигнала, сигналов, синхронизированных, точками, точках, уровнями, этих
...в результате дифференцирования сигнала, до момента сопоставления, :итоговый суммарный результат интегрирования доводят до нулевого уровня перемещением момента сопоставления.Способ иллюстрируется чертежом.Сигнал 1 У(О (эпюра а") подвергается дифференцированию с постоянной Г, т. е, имеем: (эиюра б"). В тедц(Мчение временного интервала, равного и расположенного на участке,с постоянным уровнем сигнала равного Чн , интегрируется величина О(1)" Ч, гдеЧ- заданный уровень точки А (эпюра "в, у"сток о 4 м+)где Т - постоянная интегрирования.С момента 1,+7 до момента сопостав ления 1 н интегрируют результат дифференцирования, суммируя одновременно ;результаты интегрирования ( эпюра "в", участок Ф, 4 фС,И). Сумма результатов интегрирования...
Способ автоматического управления процессом адсорбции
Номер патента: 780867
Опубликовано: 23.11.1980
Авторы: Абросимов, Аграновский, Голованов
МПК: B01D 53/02
...данную оценку в предлагаемом способе и овор одят по отклонению от заданногозначения.ная блок-сНа чертеже представлена првщк пиальсоба.я ок-схема реализации данного споСхема содержит адсорбер 1 с адсорбентом, датчик 2 электрической емкостиадсорбентаа, блок 3 регистрации текуще-го значения емкости адсорбента, блок 4сравнения заданного и текущего значения емкости ацсорбента, цифференциатепамяти, исполнительные механизмы 1112, 13 143, 14, логические элементы 15,16 ийвертор".Сппособ осуществпяют сведующим образом.В начальный момент времени при отсутствии сигнала от датчика 2 из блокчерез блоки 4 и 10 сигналы не- идут,поэтому исполнительный механизм 12перекрывает поступление исходного газана адсорбцию. На исполнительные механизмы 13 и 14...
Предыдущий патент: Система защиты размольной мельницы от попадания магнитных и немагнитных металлов
Следующий патент: Устройство для регулирования загрузки конусной дробилки
Случайный патент: Устройство для измерения удлинения движущегося текстильного материала