Самонастраивающаяся система управления с эталонной моделью
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1023281
Автор: Лащев
Текст
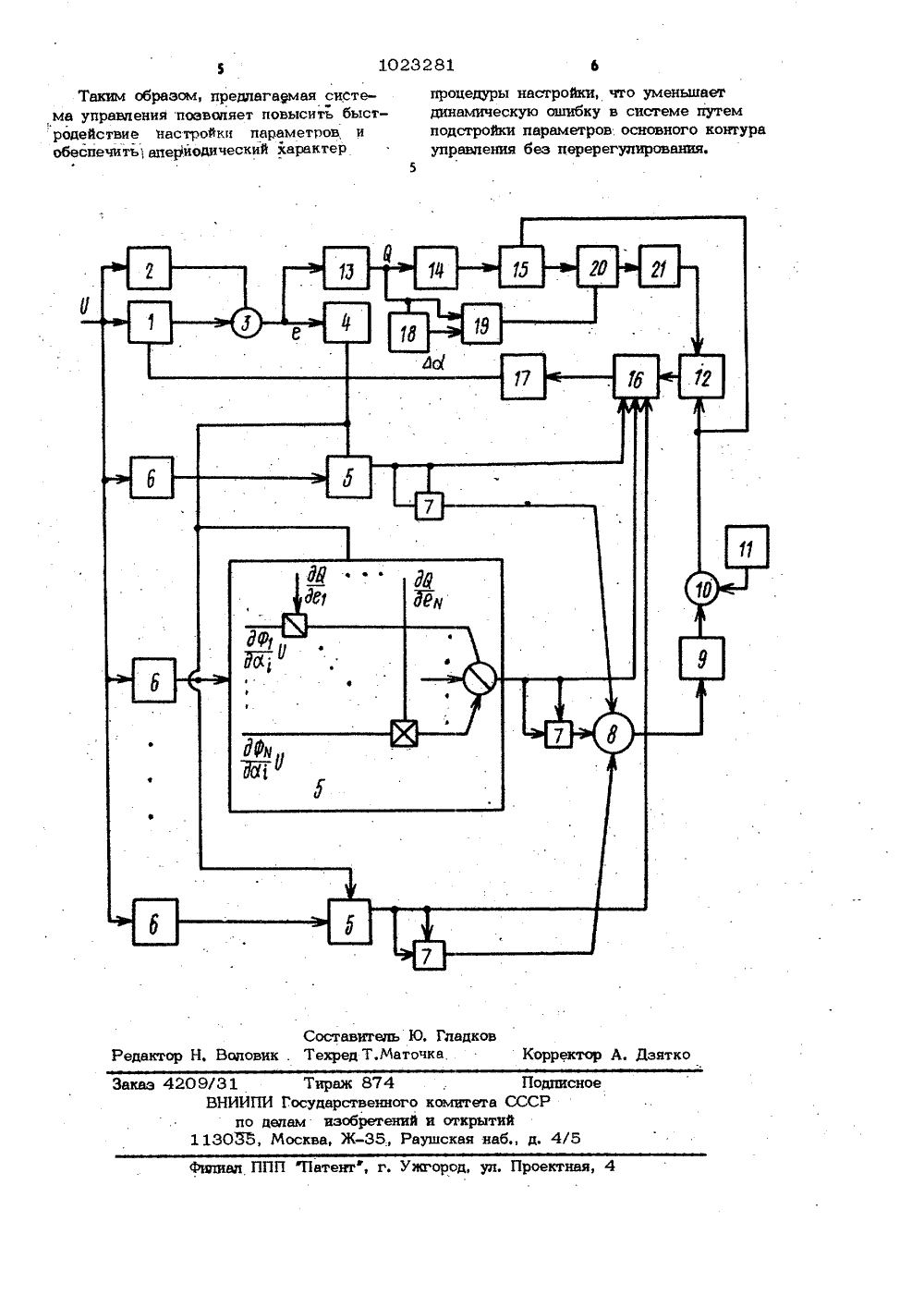
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК А экю О 05 В 13/04 БРЕТЕНИ ТВУ втоо усиблока диненсипитель 1 первым и выхоа с в тливторо дом и М ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИ ОПИСАНИЕ ИЭОн двтоескому сеЮдтельс(56) 1. Авторское свидетельство СССРМ 877471, кл. О 05 В 13/04, 1980(54) (57) САМОНАСТРАИВАЮШАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С РГАЛОННОЙ .МОДЕЛЬЮ по авт. сэ, Ж 877471, о тл и ч а ю ш а я с я тем; что с цепьюповышения точности системы, в нее доцол кительно введены дифференциатор, второй Я 0102 2 1.блок умножения, третий сумматоррой усилитепь, причем выход первлитепя соединен с вторым входомделения через последовательно соные третий сумматор и второй увход дифференцнатора соединен свходом второго блока умножениядом вычиспнтепя критерия настройкиход - с вторым входом второго блножения, выход которо о соединенрым входом третьего сумматора.Система управления по и. 1., оч а ю ш а я с я тем, что, выходсумматора соединен с вторым вхового усилителя, 1023281Изобретение относится к системам автоматического регулирования и управления,а именно к самонастраивающимся системамс моделями, может найти применение приуправлении объектами с пересменными вовремени параметрами.,По основному авт. св. Ж 877471 известна самонастраивающаяся системауправления с эталонной моделью, содержаОшая Н блоков вспомогательных операторов,входы которых подключены к входу основного контура управления и входу модели,а выходы через соответствующие блокиперемножения и суммирования подключенык входам соответствующих квадраторов и15к соответствующим входам первого блокаумножения, выходы квадраторов подключены к соответствующим входам первого сумматора, выход которого через первыйсглаживающий фильтр подключен к первому 20входу второго сумматора, к второму входу которого подслючен источник напряжения смещения, а выход - через последовательно соединенные блок деления, первый блок умножения и интегратор подклю.25чен к управляющему входу основного. контура регулирования, выход которого соединен с управляющим входом основного контура управления, выход которого соединенс первым входом блока сравнения, второй 30вход которого соединен с выходом эталон- .ной модели, а выход через блок формирования частных производных критериянастройки по компонентам ошибки. соединенс вторыми входами блоков перемноженияи суммирования, а через поспедоватепьносоединенные вычиспитель критерия кастроки, второй сглаживающий фильтр и первыйусилитель - с вторым входом блока делений з 40,Недостатком. известной системы явля-.ется ее низкая точность при изменениичастоты и амплитуды входного сигнала. Цель изобретения - повышение точности системы.Поставленная цель достигается тем, .что в системе дополнительно установлены дифференциатор, второй блок умножения, третий сумматор и второй усилитель, причем выход первого усилителя соединен с вторым входом блока деления через последовательно соединенные третий сумматор и второй усилитель, вход дифференциатора соединен с первым входом второго.блока умножения и выходом вычистп 55 тепякритерия настройки, а выход - с вторым.изводом второго блока умножения, выход которого соединен с вторым входом третьего сумматора, а выход второго сумматора соединен с вторым входом первого усилителяеНа чертеже изображена схема системы управления.Система управления содержит основной контур управления 1,эталонную модель 2 блок 3 сравнения, блок 4 формирования частных производных критерия настройки по компонентам ошибки, блоки 5 перемножения и суммирования, блоки 6 вспомогательных операторов, квадраторы 7, первый сумматор 8, первый сглаживающий фильтр 9, второй сумматор 10, источник 11 напря-" жения смещения, блок 12 деления, вычислитель 13 критерия настройки, второйсглаживающий фильтр 14,. первый усилиттель 15, первый блок 16 умножения, интегратор 17, дифференциатор 18, второйблок 19 умножения, третий сумматор 20,второй усилитель 21. На чертеже принятыследукнцие обозначения. е - сигнал ошибки,9 - критерий настройки, ф - выходной сигнал 1- ого блока вспомогательного оператора, Ьо.- выходной сигнал интегратора 17; . О- управляющее воздействие.Система работает следующим образом.Управляющее воздействие (3 подаетсяна вход. основного контура управления 1 и его эталонной модели 2, выходные сигналы которых сравниваются в блоке 3сравнения. На входе блока сравнения формируется сигнал ошибки В (сигнал ошибки может формироваться в векторной форме). Сигнал ошибки 8 подается на входблока 4 формирования частных производных критерий настройки по компонентам ошибки. Выходной сигнал блока 4, в виде отдельных компонент поступает на вторые входы соответствующих блоков 5 перемножения и суммирования, на первые входыкоторых подаются сигналы с выходов. блоков вспомогательных операторов, на входы которых подается управляющее воздействие О . Выходной сигнал каждого бло 5ка 5 поступает на соответствующий ему квадратор 7, где возводится в квадрат. С выходов всех квадраторов 7 сигналы поступают на входы первого сумматора 8,где они суммируются, Выходной сигнал сумматора 8, пройдя через сглаживающий фильтр 9, поступает на первый вход сумматора 10 в виде постоянного напряженияНа второй вход сумматора 10 поступаетнапряжение смешения с выхода источника 11, которое суммируется с выходнымсигащом фильтра 9. Сигнал с выходасумматора 10 поступает на вход делитель1023281 4 блока 12 деления., Истоках напряжения - С целью обеспечения грвдиентно про.- смешения служит для того, чтобы сигнал цедуры настройки параметров необходимо, на входе делитель блока 12 деления, чтобы всегда был очзичным от нуля. ЭЯ.Сжпап апвбкиб пойаетоа также иа й . сок а , .1 х 11 вход вычислителя критерия настройки. В . 1 качестве критерия настройки могут быть где о - подстраиваемые параметры, Ос выбраны модуль сигнала ошибки, квадрат -новного контура управлений 1 ф сигнала ошибки и т,д., Выходной сигнал- весовые коэффициенты, которыевычислителя ХЗ через фильтр 14, в ко-0 . для упрощения данной системы тором сглаживаются его пульсации, пос-управления выбраны постоянны .тупает на вход усилителя. 15, в котором ми е .усиливается и затем подается на первыйСделаем так, чтобы процедура настрой- вход третьего сумматора 20. Коэфициент., ки (1);имела апериодический характер с усиления усилителя мейяется в зависимос малым временем переходного процесса. и от выходного сигнала.суумматора 10.: для этого коэффициент .Л в уравнении (1)Кроме того, сигнал с" вйхою- ычиспи изменяется по законутеля 13 подается на вход дифференциато,ДО ра 18 и первый вход блока 19 умкожеииа, 1 КЩЯОй ДЯ+;К нжа второй вход которого подается выходной. 20: р ц р+С(. ) , сигнал дифференциатора 18. На выходе блока умножения формируется сигнал,. пропп где К =СОНМ.р.О циональнь 3 й полной производной критерия . Иастройкй дОЖ Этот сигнал подается на . втоРой вход сумматора 20, в котором он 25,: С = СОИМ 0суммйруется с выходным сигналом усщп-. В таком случае полная производнаятеля 15.: Выходной сигнал сумматора 20, . хкритерия настройки, равна. усиливается: в усилителе 21 и поступаетна в д д, блок 12 д, С. уй11 ЕР а ФЦ+МЮ)с выхода блока 12 деления поступает на 30,; Ъ / . ИЦЪчд О 1+С один нз входов блока 16 умножения, в котором он по отдельности перемножается с: выходным сигналом каждого блока 5, ВыПри малом значении постоянной в ходные сигналы блоков 5 иропорционалй,ныОлучим кончательное вырайение мени С получим окончательное в айение вида функциям чувствительности критерия настройки по настраиваемым параметрам основного контура управления 1. Сигнал.с вы- =.. + --ц Кро, Оц эх м хода блока 16 умножения поступает на.4+К 31 1 К вход интегратора 17 (управляющего уст Из выражения (3) видно,что при достаРойства), в котором формируетй-я сйгнал 4 О точно большом значении коэффициента уси- управления настройкой параметров осйов-- . -33 ого к туа ущип ения 1 Выходной сиг- . тения К усилителя 21 й величина.уе Ы-в:и1+К нал интегратора 17 воздействует на пара-пренебрежимо мала и значение полной проиэ-. метры основного контура управления 1.:.: водной критерия настройки представляет таким образом, чтобы его выхднй СИГнал 45 Собой переменную во ремени величину. был,равен выходному сигналу эталонной .: . При большом значении критерия настройки 4 й модели 2 в смйсле выбранного критерия О. : а значите и большом значении сигнала ошибДля пояснения сущности предлкеннао .; ки 6 величина КрзЗЦ 900 большая,а стехнического решения рассмотрим процеду . уменьшением эначещй я - стремится к ру. формирования сигнала настройки подроб-нулю, нее.Сигнал, пропорциональный производной В Уе щ /189 П Фк нулю, что от значения критерия настройки 0 и пОсту соответствует моменту окончания подстройпает на сумматор 20, С выхода суммато и параметров основного контура управра 20 сигналеравный РрЪд Я ЦМЦ и .ления 1 и ликвидации Ошибки, кроме ра. затем, умноженный в усилителе 21 навенсхтва 9 и, 0 й иэ (3) получаем коэффициент К, поступает в качестве депи . Равфство нулю и полнойпроизводной мого на вход;, блока 12 деления. критерия настройки ВО И О.1023281 процещры настройки, что уменьшаетдинамическую ошибку в системе путемподстройки параметров основного контурауправления беэ перерегулирования. Составитель Ю, ГладковРедактор Н, Воловик . Техред Т.Маточка Корректор ят Заказ 4209/31 Тираж 874 ВНИИПИ Государственного комвт по делам изобретений и от 1130 Ж, Москва, Ж, Раушске д. 4/5 ППП патент, г. Ужгород, ул. Проектная, 4 Таким образом, предлагаемая систее ма управления позволяет повысить быстродействие настройки параметров и обеспечить апериодический характер Подпи а СССР тий аб.,
СмотретьЗаявка
3002951, 20.11.1980
ЛАЩЕВ АНАТОЛИЙ ЯКОВЛЕВИЧ
МПК / Метки
МПК: G05B 13/04
Метки: моделью, самонастраивающаяся, эталонной
Опубликовано: 15.06.1983
Код ссылки
<a href="https://patents.su/4-1023281-samonastraivayushhayasya-sistema-upravleniya-s-ehtalonnojj-modelyu.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления с эталонной моделью</a>
Экстраполятор

Номер патента: 1038952
Опубликовано: 30.08.1983
Авторы: Васькив, Вульчин, Галецкая, Мазур, Сергийчук, Соколенко, Солодко
МПК: G06G 7/30
Метки: экстраполятор
...блоков сумматора. Вустройстве осуществляется настройкакоэффициентов экстраполирующего полинома, минимизирующая ошибку экстраполяции .2 .Недостатком известных экстраполяторов является техническая сложностьцепей настройки.Цель изобретения - упрощениеэкстраполятора,Указанная цель достигается тем,что зкстраполятор, содержащий й - разрядный аналоговый регистр сдвига,информационный вход которого является входом экстралолятора а выходысоединены с соответствующими входамиалгебраического сумматора, блок вычитания, первый вход которого подключен к входу экстраполятора, содержитуправляемый элемент задержки, ампли-.тудный детектор, сглаживающий Фильтри управляемый генератор импульсов,при этом выход алгебраического сумматора соединен с...
Малая управляющая цифровая вычислительная машина

Номер патента: 525099
Опубликовано: 15.08.1976
Авторы: Бабичева, Вейц, Левертов, Малюгин, Певцов, Прангишвили, Прохорова, Соколов, Ускач, Шкатулла
МПК: G06F 15/20
Метки: вычислительная, малая, управляющая, цифровая
...констант. Блок управления памятью 3 предназначен для управления обменом операндов между оперативным запоминающим устрой ством, регистрами памяти и другими блоками малой управляющей цифровой вычислительной машины. Регистры памяти 4, 5 и 6 используются для хранения и обмена операндами между арифметико-логическим блоком и устройством ввода-вывода. Блок управления 7 формирует необходимые управляющие сигналы ддя постоянного запоминающего устройства программ, постоянного зап( мигающего устройства команд и блока на= стройки по сигналам счетчика команд 12. Постоянное запоминающее устройство про грамм 10 содержит константы, коды операций, адреса операндов, внешних устройств и указатель размерности обрабатываемого массива. В постоянном...
Устройство для моделирования виброзащиты оператора

Номер патента: 864304
Опубликовано: 15.09.1981
МПК: G06G 7/48
Метки: виброзащиты, моделирования, оператора
...на плече человека-оператора, блоки моделирования вибрации8,9, каждый с генератором электрических колебаний 10, усилителем11, узлом дифференцирования 12, блоками умножения 13 и 14 и сумматором,15, блок 16 оптимизации с электроннымдвухлучевым индикатором 17, и задатчиками напряжений 18-21, блоки 22 и 23вычисления составляющих динамической жесткости,.блоки памяти 24-27, идентичные блоки 28-31 умножения комплексных чисел, умножители 32-35 блока 28 умножения комплексных чисел, сумматоры 36,37, блоки умножения комплексных чисел, сумматоры 38-41, блок 42 деления комплексных чисел, блок 43 вычиспомощи рентгеноскопии, податливости между другими точками и точкой 46 вводятся в блоки памяти 24-27.Если при непрерывном синтезе с, Ь, исЬизменяются, и...
Устройство для воспроизведения функций двух переменных

Номер патента: 905827
Опубликовано: 15.02.1982
Автор: Чебатко
МПК: G06G 7/26
Метки: воспроизведения, двух, переменных, функций
...аппроксимация одной 4из кривых, ограничивающих Область определения заданной Функции по Одной из переменных, например по У Аппроксимация этой кривой .производится так, чтобы погрешность аппроксимации на каждом участке не превышала допустимую величину. Для удобства следует аппроксимировать кривую Г(хуун ц,с)у имеющую наибольшее изменение крутизны по переменной х,Затем производится кусочно-линейная аппроксимация кривой Г(х,у(. гричем закон разбиения кривых Г(х Унс(кс) и Г(хуу) принимается одинаковым. Остальные кривые семейства Функций Г(хуу) аппроксимируются с тем же законом разбиения по переменной, а закон изменения тангенсов углов наклона аппроксимирующих прямых на )-ом участке аппроксимации принимается ли,нейным(у)=...
Фазовращатель дискретного действия

Номер патента: 1005272
Опубликовано: 15.03.1983
Авторы: Балясников, Коковашин, Косов, Парфенов, Свердлов
МПК: H03H 7/18
Метки: действия, дискретного, фазовращатель
...допустим, что блок памяти хранит 5 чисел: О, 1, 2, 3, 4 (000, 001, 010, О 11, 1 ОО).При поступлении импульсов на вход продвижения 5 - разрядного регистра сдвига на выходах блока памяти 2 Г д последовательно появляются коды указанных выше пяти чисел, Смена кодов числа на выходе блока б памяти может производиться как синхронно со входным сигналом, так и асинхронно. Коды чисел с выходов блока б памяти поступают на входы второго слагаемого сумматора 4. Сумматор может либо складывать два числа, коды которых поступают на входы первого (алЬлслл) и ВТОРОГО (9) слагаемых, либо вычитать из числа, код которого поступает на входы первого слагаемого (алЬл с, д) число, код которого поступает на входы второго слагаемого ( Г 1 д).Выбор режима работы...
Предыдущий патент: Импульсно-фазовая следящая система
Следующий патент: Многоканальное устройство для управления объектом
Случайный патент: Прибор для дистанционного измерения линейных перемещений в широком диапазонетемператур