Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
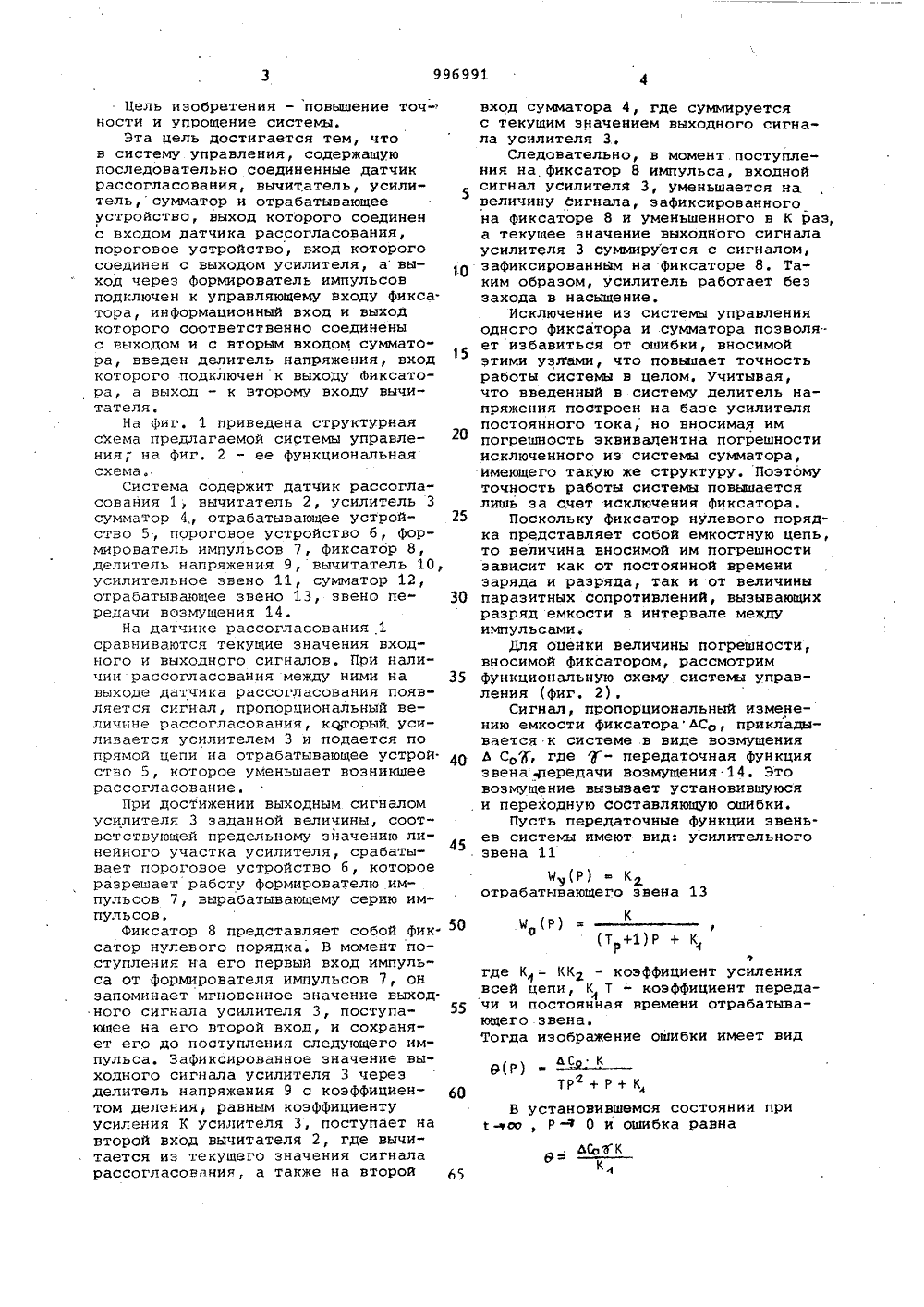
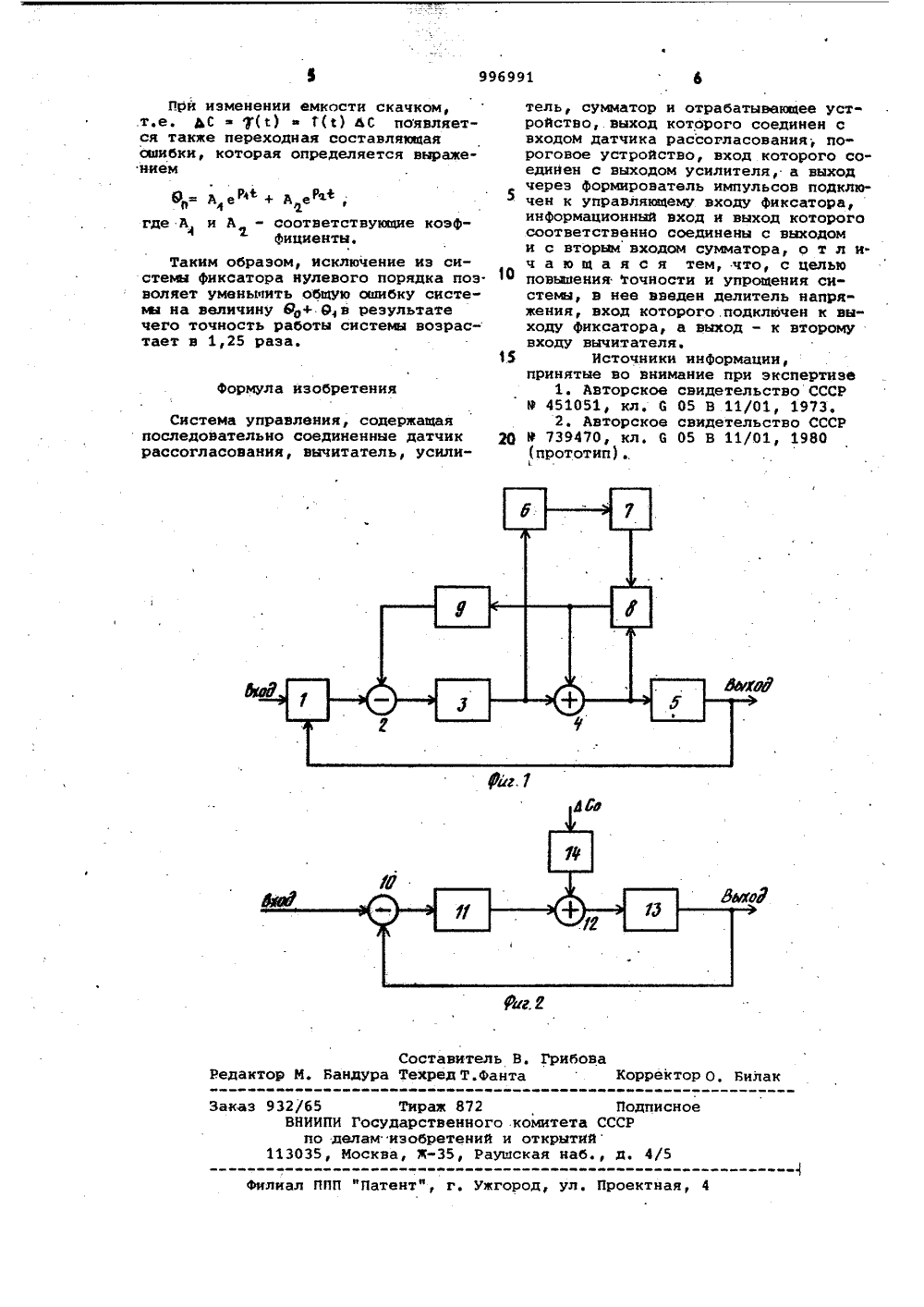
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ о 996991 Саефз. СаветсхцхСОцнэлмстичесмихРеспублик. ССС Р по дедам изобретений и ОткРытий(088. 8) Дата опубликования описания 15.02.83(54).СИСТЕМА УПРАВЛЕНИЯ в момент импульса Фиксирует мгновен.ное значение выходного сигнала усилителя, которое затем суммируется5 .с текущим значением выходного сигнала усйлителя 1).Однако в данной системе корррующая цепь содержит два фиксатдля входной и выходной цепей устеля,.что делает ее достаточноной и снижает, точность работы,Наиболее близкой по техническойсущности к изобретению являетсясистема управления, содержащая последовательно соединенные датчик рас.5 согласования, вычитатель, усилитель,сумматор и отрабатывающее устройство, выход которого подключен кдругому входу. датчика рассогласования., и пороговое устройство, входкоторого соединен с выходом усилителя, а выход через Формирователь им",пульсов подключен к первому входуфиксатора, второй вход которого соединен с входом отрабатывающего уст 25 ройства, а выход подключен к второ"му входу сумматора2.. Недостатком известной системыявляется сложная корректирующаяцель, вносящая дополнительную погрею30 ность и снижающая точность работы,ектиора,илисложИзобретение относятся к автоматическому управлению и может быть.использовано при построении высокоточ-. ных быстродействующих следящих систем.Известна система управления, содержащая последовательно соединенные датчик расаогласавания, усилитель и отрабатывающий блок, замкнутые обратной связью с параллельной коррек" тирующей цепью. Уменьшение динамической ошибки в такой системе достигается за счет порогового устройства и двух фиксаторов, включенных в параллельную корректирующую цепь. При достижении выходным сигналом усили- . теля заданной величины, срабатывает пороговое устройство, выход которого через формирователь.импульсов подсоединен к двум фиксаторам, и разрешает их работу. В момент поступления импульса первый фиксатор Фикси-, рует мгновенное значение входного сигнала усилителя, которое затеи вычитается из текущего значения сигнала рассогласования, т,е. каждый раз при достижении выходным сигналом усилителя порогового значения, вход" ной сигнал уменьшается в результате действия коррекции. Второй фиксатор В.:, ""дал,391институт,.:Связи им А."ф . ПоповаЦель изобретения - повышение точ-ности и упрощение системы.Эта цель достигается тем, чтов систему управления, содержащуюпоследовательно соединенные датчикрассогласования, вычитатель, усилитель,сумматор и отрабатывающееустройство, выход которого соединен1с входом датчика рассогласования,пороговое устройство, вход которогосоединен с выходом усилителя, авыход через формирователь импульсовподключен к управляющему входу фикса.тора, информационный вход и выходкоторого соответственно соединеныс выходом и с вторым входом сумматора, введен делитель напряжения, входкоторого подключен к выходу Фиксатора, а выход - к второму входу вычитателя.На фиг. 1 приведена структурнаясхема предлагаемой системы управления; на фиг. 2 - ее функциональнаясхемаСистема содержит датчик рассогласования 1 вычитатель 2, усилитель 3сумматор 4 отрабатывающее устройство 5, пороговое устройство б, Формирователь импульсов 7, фиксатор 8,делитель напряжения 9, вычитатель 10,усилительное звено 11, сумматор 12,отрабатывающее звено 13, звено передачи возмущения 14,На датчике рассогласования 1сравниваются текущие значения входного и выходного сигналов. При наличии рассогласования между ними на 35выходе датчика рассогласования появляется сигнал, пропорциональный величине рассогласования, ксрорый усиливается усилителем 3 и подается попрямой цепи на отрабатывающее устрой 4 Оство 5, которое уменьшает возникшеерассогласование,При достижении выходным сигналомусилителя 3 заданной величины, соответствующей предельному значению линейного участка усилителя, срабатывает пороговое устройство б, котороеразрешает работу формирователю импульсов 7, вырабатывающему серию им"пульсов.фиксатор 8 представляет собой фик.сатор нулевого порядка. В момент поступления на его первый вход импульса от формирователя импульсов 7, онзапоминает мгновенное значение выход.ного сигнала усилителя 3, поступающее на его второй вход, и сохраняет его до поступления следующего импульса. Зафиксированное значение выходного сигнала усилителя 3 черезделитель напряжения 9 с коэффициентом делания, равным коэффициентуусиления К усилителя 3, поступает навторой вход вычитателя 2, где вычитается иэ текущего значения сигналарассогласования, а также на второй вход сумматора 4, где суммируетсяс текущим значением выходного сигнала усилителя 3.Следовательно, в момент поступления на фиксатор 8 импульса, входнойсигнал усилителя 3, уменьшается навеличину сигнала, зафиксированногона фиксаторе 8 и уменьшенного в К раз,а текущее значение выходного сигналаусилителя 3 суммируется с сигналом,зафиксированным на фиксаторе 8. Таким образом, усилитель работает беззахода в насыщение,Исключение иэ системы управленияодного фиксатора и сумматора позволя.ет избавиться от ошибки, вносимойэтими узлами, что повыаает точностьработы системы в целом. Учитывая,что введенный в систему делитель нанряжения построен на базе усилителяпостоянного тока, но вносимая импогрешность эквивалентна погрешностиисключенного из системы сумматора,имеющего такую же структуру. Поэтомуточность работы системы повышаетсялишь эа счет исключения фиксатора.Поскольку Фиксатор нулевого порядка представляет собой емкостную цепь,то величина вносимой им погрешностизависит как от постоянной временизаряда и разряда, так и от величиныпаразитных сопротивлений, вызывающихразряд емкости в интервале междуимпульсами,Для оценки величины погрешности,вносимой фиксатором, рассмотримфункциональную схему системы управления (Фиг, 2),Сигнал, пропорциональный изменению емкости Фиксатора ЬСо, прикладывается к системе в виде возмущенияЬ СОЯ; где - передаточная функциязвена,передачи возмущения 14. Этовозмущение вызывает установившуюсяи переходную составляющую ошибки.Пусть передаточные функции звеньев системы имеют вид: усилительногозвена 11(Р) - Ка отрабатывающего звена 13 Ч (Р)К(Т +1)Р + Кгде К = КК - коэффициент усиления всей цепи, К Т - коэффициент передачи и постоянная времени отрабатывающего звена.Тогда изображение ошибки имеет видо: "- -ТР +Р+КВ установившемся состоянии при с-еоо, Р - О и ошибка равнаЬСозК Кл996991 Формула изобретения Составитель В, Грибоваор М. Бандура Техред Т,фанта Корректор О, Билак Тираж 872 ударственно "изобретенива, Ж, Р 32/65 ВНИИПИ Г по дел 13035, МоПодписноео комитета СССРи открытийущская наб., д. 4/5 Заказ лиал ППП "Патентф, г. Ужгород, ул. Проектная,При изменении емкости скачком, т.е. йСв 7(й) АС появляется также переходная составляющая ошибки, которая определяется выраже- нием 9 = А е + А е в 4 р У где А и А - соответствующие коэффициенты.Таким образом, исключение из системы фиксатора йулевого порядка поз. воляет уменьшить общую ошибку системы на величину 90+ О,в результате чего точность работы системы возрастает в 1,25 раза. Система управления, содержащаяпоследовательно соединенные датчикрассогласования, вычитатель, усилитель, сумматор н отрабатывенщее устройство, выход которого соединен свходом датчика рассогласования; пороговое устройство, вход которого соединен с выходом усилителя, а выходчерез формирователь импульсов подключен к управляющему входу фиксатора,информационный вход и выход которогосоответственно соединены с выходоми с вторым входом сумматора, о т л ич а ю щ а я с я тем, что, с цельюповыаения точности и упрощения системы, в нее введен делитель напряжения, вход которого. подключен к выходу фиксатора, а выход - к второмувходу вычитателя.15 Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРР 451051, кл. С 05 В 11/01, 1973.2. Авторское свидетельство СССРЗ) В 739470, кл. 6 05 В 11/01, 1980
СмотретьЗаявка
3317902, 21.07.1981
ОДЕССКИЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ СВЯЗИ ИМ. А. С. ПОПОВА
СТЕКЛОВ ВАСИЛИЙ КУПРИЯНОВИЧ, ВОРОБЬЕВ СЕРГЕЙ ГАВРИЛОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 15.02.1983
Код ссылки
<a href="https://patents.su/3-996991-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Следящая система

Номер патента: 611177
Опубликовано: 15.06.1978
Авторы: Седых, Столярова, Филипьев
МПК: G05B 11/01
Метки: следящая
...- выходное напряжение функциональных блоков, где- номер функционального блока, 13 р - величина порогового напряжения срабатывания блока 13.Система работает следующим образом.При сигнале рассогласования 13, меньшем величины порогового напряжения 13, пороговый блок 3 не срабатывает. В этом случае система работает, как система с обычной скоростной обратной связью, В том случае, когда сигнал 3; на выходе выпрямителя 5 больше, чем задаваемое пороговое напряжение 3,(см. фиг. 2 а), пороговый блок 13 формирует импульс 13,З (см. фиг. 2 б). От заднего фронта этого импульса на выходе источника эталонного напряжения 12 формируется эталонное напряжение 13, (см, фиг. 2 в) и сигнал 13,О на выходе формирователя импульса 10, длительность которого...
Система передачи и приема телевизионного сигнала с помощью дифференциальной импульсно-кодовой модуляции

Номер патента: 1104690
Опубликовано: 23.07.1984
Авторы: Векуа, Зумбуридзе, Харатишвили
МПК: H04N 7/18
Метки: дифференциальной, импульсно-кодовой, модуляции, передачи, помощью, приема, сигнала, телевизионного
...выходом приемной стороны системы, последовательно соединенные блок обнаружения искаженных элементов изображения и блок формирователей управляющих импульсов, включенные между выходом первой линии задержки и вторым входом блока исправления ошибок, последовательно соединенные второй блок обнаружения оши1104690 8запрета, Формирователь 5 управляющихимпульсов, сумматор 6, элемент 7задержки, умножитель 8, коммутатор9 каналов, на приемной стороне. преобразователь 10 кода, первыйблок 11 запрета, сумматор 2, первыйкоммутатор 13 каналов, умножитель 14,элемент 15 задержки, первый блок 16обнаружения ошибок, формирователь 17управляющих импульсов, формирователь18 длительности импульсов коммутации, регистр 19 сдвига, второй коммутатор 20 каналов,...
Устройство передачи выходного сигнала датчика к дифференциальному усилителю

Номер патента: 1689906
Опубликовано: 07.11.1991
Авторы: Бочаров, Котельников, Царевский
МПК: G01V 3/04
Метки: выходного, датчика, дифференциальному, передачи, сигнала, усилителю
...содержит два резистора 9 и 10 с входными клеммами11 и 12 для подключения через линии 13 и 14связи датчика 15 сигнала с общей точкой 16и источником 17 синфазного напряжения,Дифференциальный усилитель 18 подключается своими двумя входами к первымдвум выходным сигнальным клеммам 3 и 4,а общей точкой - к третьей выходной клемме 8 "Земля",Для правильной работы устройства сопротивления резисторов 9 и 10 и емкостиконденсаторов 1 и 2 должны быть одинаковыми, величина емкости конденсатора 6 исопротивления резистора 7 соответственно ви раз меньше и в п раз больше емкости конденсатора 1 и сопротивления резистора 9 (гдеи - целое или дробное число, значительнобольше единицы), а сумма сопротивленийдатчика 15, линии 13 связи и резистора 9должна быть...
Система управления вибростендом
Номер патента: 1117588
Опубликовано: 07.10.1984
Авторы: Гусев, Ксенофонтов, Маленький, Прохоров
МПК: G05B 19/02, G05D 19/00
Метки: вибростендом
...входом первого блока управления усилением, и генератор импульсов, соединенный выходом с его тактовым входом, введены второй предварительный усилитель и второй блок управления усилением, подключенный выходом -к управляющему входу первого усилителя с регулируемым коэффициентом передачи, вход которого связан с выходомалгебраического сумматора, а выход -с входом усилителя мощности, задающийвход второго блока управления усилением подключен к источнику регулируемого опорного напряжения, тактовыйвход - к выходу генератора импульсов,а вход фактического значения сигна-ла - к выходу первого предварительного усилителя, вход фактического значения сигнала первого блока управления усилением подключен к выходу усилителя обратной связи и к...
Способ диагностирования состояния входов-выходов транзисторно-транзисторных логических устройств

Номер патента: 1735850
Опубликовано: 23.05.1992
Авторы: Анкудинов, Беленький, Шепелев
МПК: G06F 11/00
Метки: входов-выходов, диагностирования, логических, состояния, транзисторно-транзисторных, устройств
...мультиплексор). Пля наглядности следуе показать не толькоразность токов, но и величины самихтоков, протекающих в шине питания и, общей шине объекта диагностирования,5 1735850На первом этапе процесса диагнос - будет тирования, т.е. при отключенных вы- табл. ходах ИС;Е 155 КП 2 исправный обьект иметь реакции, приведенные в1. Таблица 1 Реакции 314 15 1 ка Г, ка 31,а 1 136,0 36,0 0,0 1 1 1 30 4 29 31 Эбе 2 3511 1 е Эбв 2 35 в 11 5 1 1 1,0 1 1 1 .1 1 6 1 1 10 1 1 1 1 1 1 1 7 1 1 1 1. О 1 т1,. ф 8 1 1 11 1 0 1 11 1 30,4 29,3 1,1 91 11 1 1 0 1 11 Э 6,2 35,1 1,1 1 О 1 1 1 1 1 1 1 1 01 1 -"- и и 1 1 .1 1 1 1 1 1 1 0 1 1 и.121Ои 13 1 11 . 1 1 1 1 11 0 -"- -ие Ф П р н и е ч а н и е. 1, - величина тока, протекающего в шине питания,1 ф -...
Предыдущий патент: Устройство для управления приводом робота
Следующий патент: Дискретный авторегулятор для мелиоративных систем
Случайный патент: Асинхронно-вентильный частотно-регулируемый каскад