Система цифрового управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 970319
Автор: Тучинский

Текст
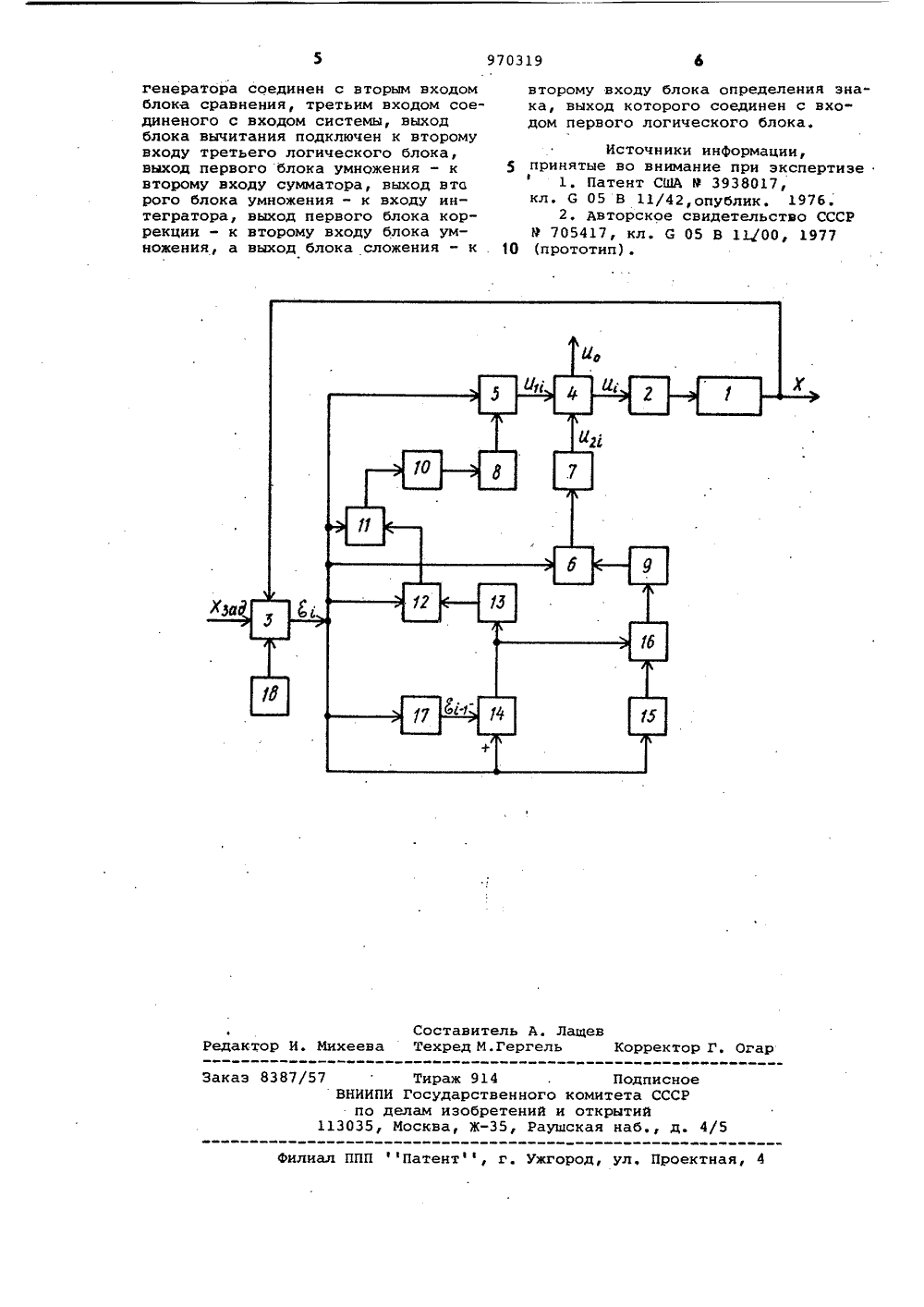
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскнкСоцналнстнческниРеспублик оц 90319(61) Дополнительное к авт. свид-ву(22) Заявлено 06.04.81 (21) 3273808/18-24с присоединением заявки Нов(23) ПриоритетОпубликовано 30.1082. Бюллетень Мо 40Дата опубликования описания 30.10,82 151 М. Кл.з 6 05 В 13/02 Государственный комитет СССР но делам изобретений н открытий(54) СИСТЕМА ЦИФРОВОГО УПРАВЛЕНИЯ Изобретение относится к системам автоматического управления технологическими процессами и может быть использовано в химической, нефтехимической и других отраслях промышленности.Известна система пропорционально- интегрального регулирования, содержащая объект управления, чувствительный элемент, исполнительный блок, сумматор, блоки пропорционального и интегрального регулирования, а также блок отключения пропорциональной составляющей регулирования 11.Система характеризуется недостаточ но высокой точностью, поскольку не предусматривается выбор эффективнойвеличины пропорционального и интегрального сигналов в зависимости от уровня сигнала ошибки, не учитывается скорость изменения ошибки. Наиболее близкой к предлагаемой по технической сущности является система управления, содержащая блок определения знака, последовательно соединенные блок сравнения и первый блок умножения и последовательно соединенные интегратор, сумматор и исполнительный блок, выход которого связан 30 с объектом управления, выходом соединенного с первым входом сравнения 2.Основным недостатком известнойсистемы является невысокая точностьотработки управляющего сигнала вследствие недостаточно эффективного выбора пропорциональной и интегральнойсоставляющих, особенно в зоне малыхошибок,Цель изобретения - повышение точности системы.Указанная цель достигается тем,что в систему введены тактовый генератор, последовательно соединенныепервый логический блок и первый блоккоррекции, последовательно соединенные второй логический блок, третийлогический блок, второй блок коррекции и второй блок умножения и последовательно соединенные блок памяти,блок вычитания, третий блок Умножения .блок сложения, второй вход которогоподключен к выходу блока сравнения,к входу блока Памяти, к второму входублока вычитания, к второму входувторого блока умножения и к входувторого логического блока, причемвыход тактового генератора соединенс вторым входом блока сравнения,третьим входом соединенного .с входомсистемы, выход блока вычитания подклю" чен к второму входу третьего логического блока, выход первого блока умножения - к второму входу сумматора, выход второго блока умножения - к входу интегратора, выход первого бло ка коррекции - к второму входу блока ,умножения, а выход блока сложения к второму входу блока определения знакавыход которого соединен с входом первого логического блока. 10Блок.-схема системы цифрового управления приведена на чертеже.Система содержит объект 1 управления, исполнительный блок 2, блок 3 сравнения, сумматор 4, первый и 15 второй блоки 5 и 6 умножения, интегратор 7, первый и .второй блоки 8 и 9 коррекции, первый логический блок 10, блок 11 определения знака, блок 12 сложениятретий блок 13 умножения, 20 блок 14 вычитания, второй и третий логические блоки 15 и 16, блок 17 памяти и тактовый генератор 18Система работает следующим образом., С заданной дискретностью, по сиг налу от тактового генератора 18, в блоке 3 сравнения определяется отклонение текущего значения регулируемой переменной Х от заданного значения Х,и на выходе формируется сигнал, пропорциональный ошибке управления Е.По значению ошибки в каждом 1-ом такте управления сумматором 4 формируется правляющее воздействие, подаваемое на объект 1 через исполнительный блок 2, Это воздействие описывается выражением о =о+о +о 1 О и И(1) 40 где О :- пропорциональная состав- Ю Пляющая, вычисляемая бло 1 ком 5; 21 "и 6 - интегральная составля"- ющая, определяемая с по мощью блоков 6 и 7. Ю,К - коэффициенты соответственно пропорциональной и интегральной составляющих 50 С помощью блоков 11-14 и 17 рассчитывается величинаХ,: 6; +фЕ( Я 1 - Я) (8 Щ" 6 л (2)характеризующая динамическое отклонение величины Х от задания.55В первом логическом блоке 10 проверяется условие 3.с )(., при выполнении которого выдается сигнал в первый блок 8 коррекции. Блок 8 выбирает значение коэффициента Кп.60К при поступлении сигнала К: от блока 10 у Д К при отсутствии сигналаот блока 10,причем Кпс Кя 1. 65 Во втором логическом блоке 15проверяется условиеЙ;сд. В случаеего выполнения осуществляется проверка третьим логическим блоком 16 условия;-бс , при выполнении которого выдается сигнал во второй блок9 коррекции, Блок 9 выбирает значение коэффициента Кн .Ки при поступлении сигнала1(, - от блока 16;К при отсутствии сигналаот блока 16,причем К 1 Ки.Значения коэффициентов Кп, Кд,К Ки, а также величины Я., с(, д;рвыбираются в зависимости от свойствобъекта управления и требований ксистеме.Увеличение интегральной со:тавляющей при малых значениях ошибки (приусловии также ограниченной скоростиее изменения) позволяет быстро устранять статическую ошибку и поддерживать высокую точность регулирования, а коррекция величины пропорциональной составляющей обеспечиваетэффективное торможение процесса управления при приближении регулируемой переменной к заданию. Так, например, применительно к процессу дегидрирования изоамиленов производстваизопрена система позволяет повыситьточность стабилизации температуры вреакторе, что существенно повышаеткачество целевого продуктаи снижает энергозатраты по производству неменее чем на 0,4.Формула изобретенияСистема цифрового управления, содержащая блок определения знака, последовательно соединенные блок сравнения и первый блок умножения и последовательно соединенные интегратор, сумматор и испблнительный блок, выход которого связан с объектом управления, выходом соединенного с первым входом блока сравнения, о т л и ч аю щ а я с я тем, что, с целью повышения точности, в нее введены тактовый генератор, последовательно соединенные первый логический блок и первый блок коррекции, последовательно соединенные второй логический блок, третий логический блок, второй блок коррекции и второй блок умножения и последовательно соединенные блок памяти, блок вычитания, третий блок умножения, блок сложения, второй вход которого подключен к выходу блока сравнения, к первому входу блока определения знака, к входу блока памяти, к второму входу блока вычитания, к второму входу, второго блока умножения и к входу второго логического блока, причем выход тактового970319 Составитель А. ЛащевРедактор И. Михеева Техред М.Гергель Корректор Г. Ог Тираж 914 ВНИИПИ Государственного по делам изобретений и 13035, Москва, Ж, РаушПодписноекомитета СССРоткрытийская наб., д, 4/5 акаэ лиал ППП фПатент, г, Ужгород, ул, Проектн генератора соединен с вторым входомблока сравнения, третьим входом соединеного с входом системы, выходблока вычитания подключен к второмувходу третьего логического блока,выход первого блока умножения - квторому входу сумматора, выход втарого блока умножения - к входу интегратора, выход первого блока коррекции - к второму входу блока умножения, а выход блока сложения - к . второму входу блока определения знака, выход которого соединен с входом первого логического блока Источники информации,5 принятые во внимание при экспертизе1. Патент США Р 3938017,кл. С 05 В 11/42,опублик. 1976.2. Авторское свидетельство СССРР 705417, кл. С 05 В 1300, 197710 (прототип).
СмотретьЗаявка
3273808, 06.04.1981
ПРЕДПРИЯТИЕ ПЯ В-8296
ТУЧИНСКИЙ ВЛАДИМИР РАФАИЛОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: цифрового
Опубликовано: 30.10.1982
Код ссылки
<a href="https://patents.su/3-970319-sistema-cifrovogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система цифрового управления</a>
Способ сверления отверстий с наклонным входом-выходом и устройство для его осуществления

Номер патента: 961863
Опубликовано: 30.09.1982
МПК: B23B 35/00
Метки: входом-выходом, наклонным, отверстий, сверления
...в начальный момент выхода одной режущей кромки до максимальной величины при полном ее выходеи затем уменьшается до нуля по меревыхода второй режущей кромки. Скорости соприкасающихся точек режущейкромки инструмента 1 и опоры 3,служащей для приложения уравновешивающих усилий, равны между собой.В предлагаемом устройстве инструмент 1 направляют по кондукторнойвтулке 4, закрепленной в сборном корпусе 5. С нерабочей режущей кромкойинструмента 1 (фиг. 5) контактируетопора, выполненная в виде упорногокольца б, установленного в проточкедвух роликов 7, посаженных на подшипниках 8 качения в ползушке 9.Ползушка выполнена с возможностьюосуществления возвратно-поступательных перемещений на колонках 10, запрессованных в основании 11, причемна...
Генератор случайных чисел

Номер патента: 1817093
Опубликовано: 23.05.1993
Авторы: Клавдиев, Косарев, Мартыщенко, Филюстин
МПК: G06G 7/58
Метки: генератор, случайных, чисел
...значения гамма-функции, 32 умножения и на второй вход вычитателя 33а+1 и инициирует их работу. Значения Л р с выхода блока 30 возведения в степень иа+1Г ( ) с выхода блока 31 вычисленияр гамма-функции поступают на вторые информационнье входы блоков 34, 35 умножения соответственно, Результат Л хоР с выхода блока 32 умножения поступает на вторые информационные входы блоков 36 возведения в степень и 40 умножения. С выхода вычитателя 33 величина -а подается на второй информационный вход блока 37 возведения в степень. Шестой тактовый импульс с выхода синхронизатора подается на управляющие входы блоков 34, 35 умножения и 36, 37 возведения в степень, Произведенияа+1 а+1р Л Р изГ( )с выходов блоковР34, 35 умножения соответственно...
Устройство для сравнения последовательных двоичных кодов

Номер патента: 467344
Опубликовано: 15.04.1975
Автор: Портнов
МПК: G06F 7/04
Метки: двоичных, кодов, последовательных, сравнения
...весу младшего (п) разряда, должны иметь противоположные значения во всех разрядах от (т+1) до п (где т(п), если зафиксировано расхождение кодов в разряде т. Совпадение значений кодов в любомразряде от (т+1) до п при их несовпадениив разряде т является признаком несмежности кодов. Однако несовпадение кодов в разрядах (т+1) - п при их несовпадении в разряде т является недостаточным условием для определения смежности кодов. Так, например, инверсные двоичные коды, удовлетворяя указанному выше условию, не являются смежными. Достаточным условием смежности кодов при несовпадении их значений в разряде т является несовпадение их в разрядах (т.+ +1) - п и соответствие значений сигналов в разрядах от (т+1) до п на выходе второго источника...
Устройство для сравнения последовательных кодов чисел

Номер патента: 486315
Опубликовано: 30.09.1975
МПК: G06F 7/00
Метки: кодов, последовательных, сравнения, чисел
...он сохраняется до поступления кода второго числа. С приходом кода второго числа на выходе регистра сдвига появляется код предыдущего числа, Входной код и код с регистра сдвига синхронно одноименными разрядами в прямом и инверсном виде через элементы НЕ 2, 3 поступают на элементы И 4, 5, где проводится их поразрядное сравнение. В случае, если одноимеиные разряды равнозначны, сигналы на выходах элементов И 4, 5 отсутствуют. При этом триггеры 6, 7 сохраняют свое состояние и обеспечивают прохождение равнозначных разря. дов через элементы И 8, 9 и элемент ИЛИ 10 на шину регистра сдвига.Появление, первой комбинации неравнозначных разрядов определяет большим тот код, в котором по данному разряду следует 1.В случае, если в первой...
Устройство для диагностирования логических блоков

Номер патента: 1520518
Опубликовано: 07.11.1989
МПК: G06F 11/30
Метки: блоков, диагностирования, логических
...появляется нулевая комбинация, то на управляющем выходе 4 О появится сигнал РЗС - разрешения сравнения, поступающий на блок 16 сравнения. Если содержимое регистра 14 начальных состояний равно адресу на выходе генератора 9 адреса, то иа вы ходе блока 16 сравнения появляетсясигнал СРВ, поступающий; во"первых, на блок 3 управления, во-вторых, на делитель 17 частоты. Каждый второй сигнал СРВ вызывает изменение сигнала перемены направления (ПН) на выходе делителя 17 частоты. Этот сигнал поступает на генераторы 9 адреса и 18 ПСП и вызывает изменение направления сдвига содержимого этих генераторов,После проверки проверяемого блока 8 на первом начальном состоянии работа задатчика 2 тестов повторяется на следующем начальном состоянии по...
Предыдущий патент: Экстремальный регулятор
Следующий патент: Устройство для управления промышленным роботом
Случайный патент: Электроизмерительный прибор с трехпозиционным регулированием