Турельный стряхиватель плодов с деревьев
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 959676
Авторы: Варламов, Виноградова, Козубов, Пименов
Текст
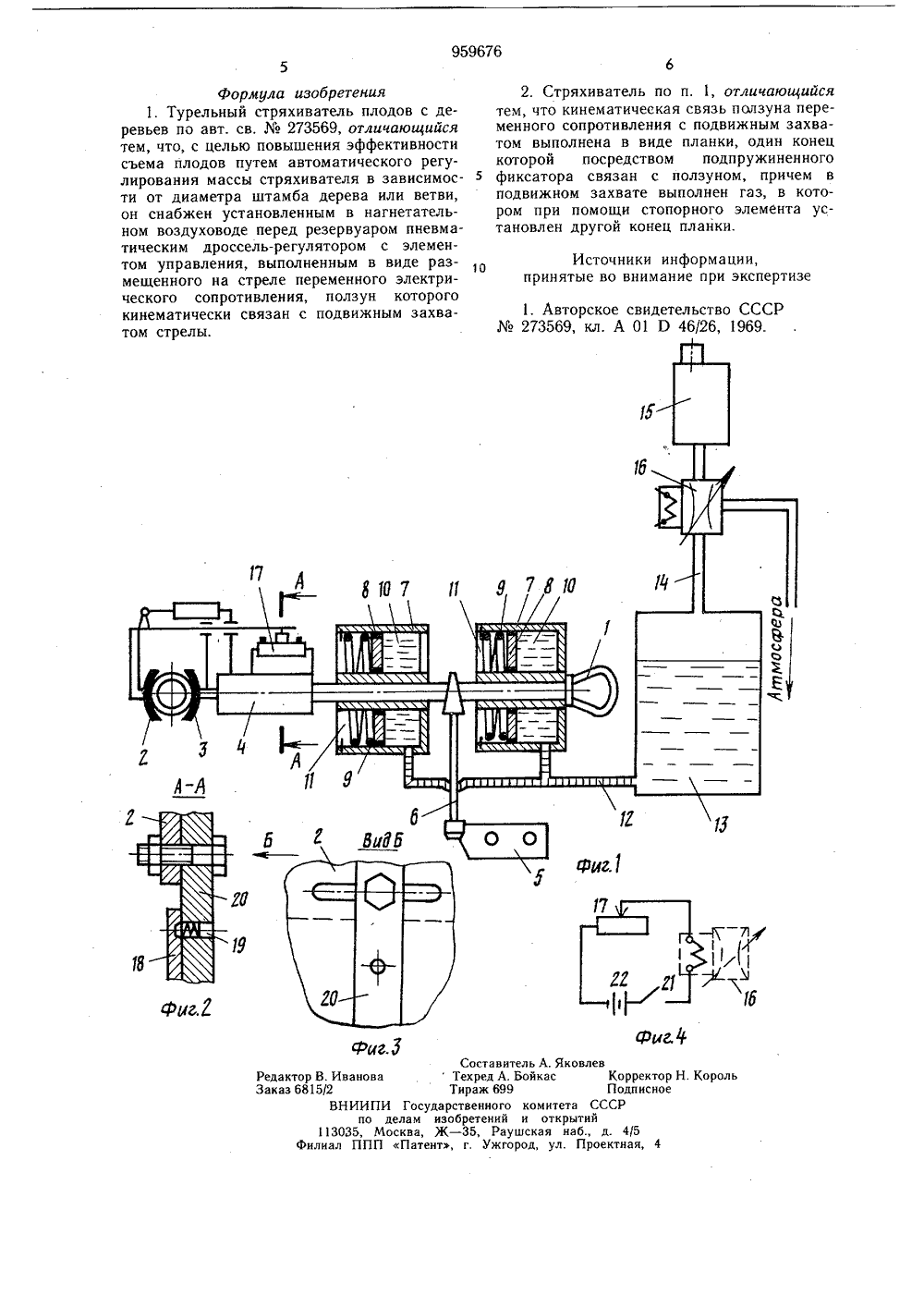
ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскикСоциалистическийРеспублик 1 и 959676(51) М Кл 3 А 01 Р 46/26 Гееударстееннмй квинтет СССР Опубликовано 23.09.82. Бюллетень 35(53) УДК 631.358, .1 (088.8) ев делам нзебретеннй н еткрытийДата опубликования описания 28.09.82Всесоюзный ордена Трудового Красного Знамен(71) Заявитель исследовательский институт сельскохозяйственного машиносим. В. П. Гррячкина(54) ТУРЕЛЬНЫЙ СТРЯХИВАТЕЛЬ ПЛОДОВ С ДЕРЕВЬЕВ Изобретение относится к сельскохозяйственному машиностроению, в частности к плодоуборочным машинам инерционного типа.По основному авт. св.273569 известен турельный стряхиватель плодов с деревьев, включающий стрелу, оборудованную подвижным и неподвижным упорами захвата штамба дерева или его ветвей и инерционным вибратором, причем на стреле закреплена емкость, выполненная в виде 10 кольцевых цилиндрических баков, охватывающих стрелу и заполняемых жидкостью. Для заполнения емкости жидкостью имеются резервуар и компрессор, нагнетательной магистралью соединенные между собой, Кроме того, в цилиндрических баках вставлены поршни, разделяющие баки на две полости Й.Недостатком известного стряхивателя является то, что он не создает наиболее рациональных условий стряхивания плодов 20 с деревьев и ветвей различной толщины, поскольку масса стряхивателя в процессе стряхивания является постоянной величиной и не находится в наиболее рациональных соотношениях с массой встряхиваемого объекта (дерева или ветви) в каждом конкретном случае. Это в конечном итоге снижает эффективность стряхивания плодов.Целью изобретения является повышение эффективности съема плодов путем автоматического регулирования массы стряхивателя в зависимости от диаметра штамба дерева или ветви.Указанная цель достигается тем, что турельный стряхиватель плодов с деревьев снабжен установленным в нагнетательном воздуховоде перед резервуаром пневматическим дроссель-регулятором с элементом управления, выполненным в виде размещенного на стреле переменного сопротивления, ползун которого ки нем атически связан с подвижным захватом стрелы.Причем кинематическая связь ползуна переменного сопротивления с подвижным захватом выполнена в виде планки, один конец которой посредством подпружиненного фиксатора связан с ползуном, причем в подвижном захвате выполнен паз, в котором посредством стопори ого элемента установлен другой конец планки.зо 35 На фиг. 1 изображена принципиальная схема турельного стряхивателя плодов с деревьев; на фиг. 2 - разрез А - А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - электрическая схема управления работой пневматическим дроссельрегулятором. Турельный стряхиватель плодов с деревьев включает стрелу 1, оборудованную подвижным 2 и неподвижным 3 упорами захвата штамба дерева или его ветвей и инерционным вибратором 4, и монтируется на вращающемся в горизонтальной плоскости кронштейне 5 при помощи вертикальной оси 6, которая расположена в центре тяжести стряхивателя. Такая компоновка стряхивателя обеспечивает ему все степени свободы, необходимые во время работы. На стреле соосно и симметрично закреплены кольцевые цилиндрические баки 7, внутри которых имеются подвижные поршни 8, подпружиненные пружиной 9 и разделяющие баки на две полости 10 и 11, первая из которых трубопроводом 12 соединена с резервуаром 13, заполненным тяжеловесной жидкостью. Резервуар 13 . соединен нагнетательной магистралью 14 с компрессором 15, Регулировка подачи воздуха осуществляется с помощью управляемого дроссель-регулятора 16, схема управления которого выполнена в виде переменного электрического элемента, например активного сопротивления 17, кинематически связанного с подвижным 2 и неподвижным 3 упорами захвата. Ползун 18 переменного сопротивления 17 с помощью подпружиненного фиксатора 19 и промежуточной планки 20 соединен с подвижным упором 2 захвата. Причем точка соединения промежуточной планки 20 с подвижным упором 2 захвата имеет возможность устанавливаться и фиксироваться вдоль направляющего паза подвижного упора. Схема управления посредством контакта 21 подключена кисточнику 22 тока. Турельный стряхиватель.плодов с деревьев работает следующим образом. Предварительно производится настройкаустройства на данную убираемую конкретную культуру. Оператор экспериментально устанавливает точку соединения ползуна 18 с подвижным упором 2 захвата в такое положение, при котором создаются оптимальные условия (т, е. масса стряхивателя будет оптимальной) встряхивания плодов соответственно убираемому сорту и диаметру штамба дерева (нли скелетной ветви), Далее оператор подводит стрелу с захватом к штамбу дерева или его скелетной ветви. При этом электромагнит пневматического дроссель-регулятора 16 обсточен и воздух из компрессора 15 через дроссельрегулятор 16 уходит в атмосферу, Подпру 5 зо 25 5 50 55 жиненные поршни 8 вытесняют жидкость из полостей 10 по трубопроводу 12 в резервуар 13. Далее оператор с помощью перемещения подвижнсго упора 2 производит зажим объекта встряхивания. Одновременно с этим он нажимает на контакт 21, подключая тем самым электромагнит дроссель-регулятора 16 и переменное сопротивление 17 к источнику 22 тока. В зависимости от диаметра штамба дерева или скелетной ветви автоматически устанавливается положение ползуна 18 сопротивления 17, которое определяет величину тока, проходящего через электромагнит дроссельрегулятора 16 при подключении его к источнику 22 тока. Поскольку пропускная способность дроссель-регулятора зависит от величины проходящего через его катушку тока, то естественно, что положение ползуна 18 сопротивления 17 и будет определять эту пропускную способность. В зависимости от пропускной способности дроссель-регулятора 16 будет происходить заполнение соответствующего объема полостей 10 тяжеловесной жидкостью из резервуара 13, которое в конечном итоге определяет массу турельного стряхивателя в процессе встряхивания плодов, а значит и условия протекания самого процесса. Таким образом, масса турельного стряхивателя будет все время автоматически определяться диаметром штамба дерева или его скелетной ветви. После заполнения полостей 10 жидкостью оператор включает вибратор 4, в результате чего происходит встряхивание плодов. После встряхивания плодов останавливают вибратор, контактом 21 обесточивают электромагнит дроосельрегулятора 16, в результате чего жидкость из полостей 10 подвижными подпружиненными поршнями 8 вытесняется в резервуар 13, и производят отвод подвижного упора 2 захвата. При значительном отводе подвижного упора 2 захвата ползун 18 переменного сопротивления 17, кинематически связанный с подвижным упором 2 захвата, доходит до крайнего конечного положения и далее срабатывает подпружиненный фиксатор 19, размыкая тем самым связь ползуна 18 переменного сопротивления 17 с подвижным упором 2 захвата.Использование изобретения позволит производить автоматическое регулирование массы стряхивателя в зависимости от диаметра штамба дерева или его скелетной ветви, создать наиболее рациональные условия протекания процесса встряхивания плодов на каждом конкретном плодовом дереве, что в конечном итоге повысит эффективность встряхивания плодов (т. е, увеличивается полнота съема плодов, повышается производительность работы и снижается энергоемкость процесса встряхивания) .959676 ФигЗ Составитель А. Яковлев Редактор В. ИвановаТехред А. Бойкас Корректор Н. Король Заказ 6815/2 Тираж 699 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4/5 Филиал ППП Патент, г. Ужгород, ул. Проектная, 4формула изобретения1. Турельный стряхиватель плодов с деревьев по авт. св,273569, отличающийся тем, что, с целью повышения эффективности съема плодов путем автоматического регулирования массы стряхивателя в зависимости от диаметра штамба дерева или ветви, он снабжен установленным в нагнетательном воздуховоде перед резервуаром пневматическим дроссель-регулятором с элементом управления, выполненным в виде размещенного на стреле переменного электрического сопротивления, ползун которого кинематически связан с подвижным захватом стрелы,2. Стряхиватель по п. 1, отличающийсятем, что кинематическая связь ползуна переменного сопротивления с подвижным захватом выполнена в виде планки, один конец которой посредством подпружиненного 5 фиксатора связан с ползуном, причем вподвижном захвате выполнен газ, в котором при помощи стопорного элемента установлен другой конец планки. Источники информации,принятые во внимание при экспертизе
СмотретьЗаявка
3308879, 26.03.1981
ВСЕСОЮЗНЫЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ НАУЧНО ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ СЕЛЬСКОХОЗЯЙСТВЕННОГО МАШИНОСТРОЕНИЯ ИМ. В. П. ГОРЯЧКИНА
ПИМЕНОВ БОРИС ИВАНОВИЧ, ВАРЛАМОВ ГРИГОРИЙ ПРОКОФЬЕВИЧ, КОЗУБОВ ВЛАДИМИР ПЕТРОВИЧ, ВИНОГРАДОВА ВИТАЛИНА АЛЕКСАНДРОВНА
МПК / Метки
МПК: A01D 46/26
Метки: деревьев, плодов, стряхиватель, турельный
Опубликовано: 23.09.1982
Код ссылки
<a href="https://patents.su/3-959676-turelnyjj-stryakhivatel-plodov-s-derevev.html" target="_blank" rel="follow" title="База патентов СССР">Турельный стряхиватель плодов с деревьев</a>
Устройство для захвата и трелевки деревьев

Номер патента: 1757933
Опубликовано: 30.08.1992
Авторы: Асмоловский, Беляк, Кирильчик, Симанович
МПК: B60P 3/40
Метки: деревьев, захвата, трелевки
...сторон, образуя с ними равнобедренный треугольник, в вершине которого расположено шарнирное соединение стрелы и указанных рычагов, причем щит шарнирно соединен с рамой посредством дополнительного рычага, один конец которого жестко соединен с щитом, а другой конец - шарнирно соединен с рамой, а захват соединен с рычагами в вершине треугольника ограничительной тягой,На фиг, 1 изображено устройство, вид сбоку; на фиг. 2 - оборудование, вид сзади,Устройство для захвата итрелевки деревьев монтируется на раме 1 самоходного шасси 2. Трелевочный щит 3 крепится на раме 1 при помощи шарнира 4 и дополнительного рычага 5 и приводится в действие гидроцилиндром 6, На щите 3 установлены кронштейны 7 и 8, которые явля ются местом крепления...
Устройство для захвата и накопления деревьев при срезании их с корня

Номер патента: 578033
Опубликовано: 30.10.1977
Авторы: Вигант, Даболс, Розин, Рубулис, Эпалт
МПК: A01G 23/08
Метки: деревьев, захвата, корня, накопления, срезании
...челюсти 3 и 4, имеющие индивидуальный привод в виде силовых гидроцилпндров 5 и 6, штоки которых шарнирно соединены с захватными челюстями 3 и 4, а гпдроцилиндры - с рамой 1. К раме 1 жестко крепится приемник 7 для накопления срезанных деревьев 8.Захватные челюсти 3 и 4 выполнены в виде многозвенников, состоящих из отдельных шарнирно соединенных звеньев, удерживаемых в выпрямленном положении связующим элементом, например тросом 9 с пружиной 10. Конструкция звеньев многозвенника обеспечивает возможность поворота их вокруг шарниров относительно друг друга только в од 578033ном направлении. Гидроцилиндры 5 и 6 подключены посредством трубопроводов 11 к одной секции гидрораспределителя 12, причем штоковая полость гидроцилиндра 5...
Устройство для захвата и накопления деревьев при срезании их с корня

Номер патента: 938837
Опубликовано: 30.06.1982
Авторы: Вейдеман, Вигант, Зитане, Розин, Рубулис
МПК: A01G 23/08
Метки: деревьев, захвата, корня, накопления, срезании
...от исходного положения (когда захват выпрямлен). Каждый из захватов 4 и 5 снабжен тягой 13 и 4, один конец каждой из которых шарнирно установлен на одном из тех звеньев захвата, который не подсоединен к штоку гидроцилиндра привода захвата, а другой - снабжен пальцами 15 и 16, которые установлены938837 Формула изобретения юг,l4 1 бТираж 699 ПодписноеУжгород, ул. Проектная, 4 акая 45/4 Патент ВИИИПИ Филиал П с возможностью перемещения соответственно в пазах 17 и 8 рамы 1.Устройство для захвата и накопления дсрвьсв при срезании их с корня работает слсдукнцим образом.При надвнгании устройства на дерево, один из его захватов, например захват 5, закрыт, а другой -- открыт. Захват дерева производится открытым захватом 4. Выдвигая шток...
Устройство для захвата и трелевки деревьев

Номер патента: 1404386
Опубликовано: 23.06.1988
Авторы: Арабей, Данилович, Кирильчик, Симанович, Смеян, Ярошевич
МПК: B60P 3/41
Метки: деревьев, захвата, трелевки
...работает следующим образом.Подъехав к предварительно сформированной пачке деревьев, машина устанавливается на набор пачки, После этого, из кабины управляя гидроцилиндром 14 приводащита 9, ориентируют челюстной захват 6 нанабор паыки, при этом челюсти предварительно раскрытые. При наборе пачки щит 9посредством опорной пяты 13 контактируетс поверхностью земли. Опорная поверхностьможет быть ниже стояния колес трактора. Вэтом случае при наборе пачки стрела 3 контактирует с опорой 16, установленной нараме 1.Щит 9 может быть установлен в среднемположении, тогда стрела 3 контактирует сего поверхностью балкой 10 и опорой 16,которая при контакте со стрелой 3 за счетдугообразной выемки позволяет стреле 3 с захватом 6 занимать...
Захват для ствола дерева в установках для обрезки сучьев

Номер патента: 1790342
Опубликовано: 23.01.1993
МПК: A01G 23/08, B27L 1/00
Метки: дерева, захват, обрезки, ствола, сучьев, установках
...для обрезки сучьев. вид сбоку: на фиг. 2 - вид А на фиг 1: нл фиг.3 - разрез Б-Б на фиг. 2.Захват содержит несущий элемент 1. в данном конкретном случае направляющук балку сучкорезной установки и закрепленный на ней посредством кронштейна 2 поворотный вокруг Горизонтальной оси . захватный рычаг 4. снабженный силовым приводом. выполненныл 1 в виде гидроцилиндра 5. На кронштейне 2 несущего элемента закреплен Ч-образный упор с опорными полками б, На указанных полках упора выполнены планки 7 с заостренными кромками а. и расположенными под углом а друг к другу с1790342 тонкомерной древесины усилия, развиваемого гидроцилиндром, достаточно для удержания ствола захватным рычагом. При обработке древесины с достаточно крупны ми сучьями, вследствие...
Предыдущий патент: Режущий аппарат чаесборочной машины
Следующий патент: Устройство для обмолота сельскохозяйственных культур
Случайный патент: Способ получения фибридов