Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
О П И С А Н И Е ,943641ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Совхоз Советски кСоциаяистичееникреспублик(23)Приоритет РкударвтеаиЫ квеитет СССР аа йоан кзабрвтеник н оирмткй) НЕЛИНЕЙНОЕ КОРРЕКТИРУЮШЕЕ УСТРОЙСТВОДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯС ПЕРЕМЕННОЙ СТРУКТУРОЙ Однако носч.н сист меняющейся ществляется времени воз приложенном существенное увеличение точемы, т.е. сведение медленносоставлятошей до нуля, осутолько при постоянном во мущающем воздействии,к системе. Изобретение относится к системамавтоматического управления с переменной структурой,По основному авт. св. Ы 742874известно устройство, которое содержит5последовательно соединенные первыйсумматор, блок изменения структуры,первый коммутатор, первый усилитель,второй коммутатор и второй сумматор,а также второй усилитель и последовательно соединенные низкочастотныйюльтр и первый интегратор, нелинейныйэлемент с зоной нечувс;,гвительности,причем вход второго усалитепя соединенс вторым выходом первого коммутатора,а выход - с вторыми входом второгосумматора второго коммутатора, третий, вход второго коммутатора соединен спервым входом первого сумматора, четвертый вход с выходом первого сумматора, второй выход с вторым входомвторого сумматора, третий и четвергыйвыходы - с третьим и четвертым входами первого сумматора соответственно,2вторые входы первого сумматора, блока изменения структуры и первого коммутатора соединены со входом устройства, второй вход нелинейного элемента с зоной нечувствительности соединен с выходом второго сумматора, а вход низкочастотного фильтра соединен с вторым входом первого сумматора.Данное устройство позволяет изменять характеристики закона управлещи в продессе регулирования, что дает возможность восстанавливать в системе скользяший режим при его срыве, а также позволяет уменьшить медленно менякщуюся составлнющуто сигнала ошибки и тем самым уведшчить точность системы 11 .р 1 О 15 20 25 ЭО зр 40 45 50 55 Если же возмущающее воздействиеизменяется во времени, то медленноменяюшаяся составляющая уменьшаетсядо некоторого значения, зависящего отскорости изменения возмущения.Цель изобретения - увеличение точности системы при действии на системуизменяющихся во времени возмущений,Поставленная цель достигается тем,чго устройство дополнительно содержитпоследовательно соединенные второй интегратор и третий сумматор, причемвход второго интегратора соединен с выходом первого иегегратора и с вторымвходом третьего сумматора, выход которого соединен с первым входом нелинейного элемента с зоной нечувствительнооти.На чертеже представлена блок-схемаустройства,Устройство содержит первый сумматор 1, блок изменения структуры 2,первый коммутатор 3, усилители 4 и 5,второй суьжатор 6, второй коммутатор7, низкочастотный фильтр 8, первый интегратор 9, нелинейный элемент с зонойнечувствительности 10, второй интегратор 11, третий сумматор 12.Устройство рабогает следуюцшм образом,На первый сумматор 1, формирующийфункцию переключения, подается сигнал.ошибки и ее первой производной и сигнал с выхода усилителя 4 и 5 черезвторой коммутатор 7 в зависимости отсостояния первого коммугатора 3. Блок2 изменения структуры на основе информации о знаках сигнала ошибки и сигнала функции переключения с помощью первого коммутатора 3 изменяет структурусистемы, изменяя выходное воздействиепо сигналу ошибки, получаемое на выходе второго сумматора 6.Функция переключения формируетсякак линейная комбинация сигналов ошибки и ее производной и сзгнала с выходаодного из усилителей в зависимости отсостояния первого коммутатора 3. Этисигналы берутся с определенными весовыми коэффициентами, которые изменяются при Отсутствии и наличии в системескопьзящего режима. Работа второгокоммутатора 7 заключается в том, чгоон распознает наличие или отсутствиев системе скользящего режима, Эго делается на основе анализа сигнала функции переключения, который в скопьзацемрежиме является высокочасготным. Частота переключения зависит только от, характеристик блока 2 изменения структуры и первого коммутатора 3 и может достигать бщп ших значений, Исполнительные цепи второго коммутаторе 7 при наличии высокочастотного режима находятся в одном усгойчивом состоянии, а при его отсутствии - в другом.Таким образом, при существовании в системе скользящего режима второй коммутатор 7 подключает к первому 1 и второму 6 сумматорам сигнал, соответствующий одним значениям сигнала ошибки и ее производной, а при его отсутствии - другим значениям, изменяя частотные характеристики корректирующего устройства в целом и фазовые соотношения функции переключения. Фазовые соотношения функции переключения изменяюгся так, чтобы в системе всегда существовал скользящий режим.Низкочастотный фильтр 8 выделяет ,медленно меняккцуюся составляющую сигнала ошибви, которая поступает на последовательно соединенные первый 9 и второй 11 интеграторы, выходные сигналы которых суммируются в третьем сумматоре 12. Сигнал с выхода третьего сумматора 12 подается на первый вход нелинейного элемента с зоной нечувствительности 10, в результате чего происходит регулирование зоны нечувствительности в соответствии с алгоритмом ф о-ХоЮ-ХХХц+где Ьо- начальное и текущее значение зоны нечувствительности;( - медленно меняющаяся составляющая сигнала ошибки., Регулирование зоны нечувствительности нелинейного элемента приводит к изменению его статической характеристики, в результате чего происходит уменьшение медленно меняющейся составляющей до нуля как при постоянном, так и при линейно изменяющемся возмущающем воздействии, прщгоженном к системе.Таким образом, дополнительное введение второго интегратора и трегьего сумматора позволяет свести к нулю медленно меняккцуюся составляющую сигнала ошибки не только при постоянном, но и при линейно изменяющемся возмущающем воздействии и тем самым существенно (в пять раз) увеличить точность системы.5 943641 6формула и з о б р е т е и и я причем вход второго интегр рнен с выходом иервого интегратора иНелинейное корректирующее устрой с вторым входом третьего суьвюатора, ство для систем автоматического управ- выход которого соединен с первым вхо ления с переменной структурой по авт. 5 дом нелинейного элемента с зоной несв, Ж 742874, о т л и ч а ю щ е е - чувствительности.с я тем, что, с целью увеличения точнос- Источники информацю, ти системы при дейстщщ на систему принятые во внимание про экспертизе изменякяпнхся во времени возмущений, 1, Авторское свидетельство СССР оно содержит последовательно соединен й 742874, кл. 805 В 13/02, 1979 г ные второй интегратор и третий сумматор, прототип., Москва, Ж 35, Ра открытий кая на
СмотретьЗаявка
2743772, 30.03.1979
ПЕРМСКОЕ ВЫСШЕЕ ВОЕННОЕ КОМАНДНОЕ УЧИЛИЩЕ
ЖАНЖЕРОВ ЕФИМ ГРИГОРЬЕВИЧ, НЕКРАСОВ ВАЛЕРИЙ ГЕОРГИЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: корректирующее, нелинейное, переменной, систем, структурой
Опубликовано: 15.07.1982
Код ссылки
<a href="https://patents.su/3-943641-nelinejjnoe-korrektiruyushhee-ustrojjstvo-dlya-sistem-avtomaticheskogo-upravleniya-s-peremennojj-strukturojj.html" target="_blank" rel="follow" title="База патентов СССР">Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой</a>
Устройство для изготовления растрированныхполиграфических фотоформ

Номер патента: 851329
Опубликовано: 30.07.1981
Авторы: Коган, Кузнецов, Узилевский
МПК: G03F 7/02
Метки: растрированныхполиграфических, фотоформ
...к выходу источника 5 видео. сигнала. Выход сумматора б подключен ко входу усилителя 9 записи, своим выходом подключенного к управляющему электроду электроннолучевого модулятора 4, к модулирующему электроду которого подключен-выход генератора 10 растровых импульсов, а к отклоняющему входу подключен выход генератора 11,импульсов тока следящего отклонения. Генераторы 7 и 11 своими синхровходами соединены с выходом гене.ратора 10 растровых импульсов. абота устройства осуществляется следующим образом.С выхода генератора 10 растровые импульсы (фиг. 2 а) поступают на модулирующий электрод электроннолучевого модулятора 4, обеспечивая периодическое включение светового пятна на его экране и тем самым формирование растровой структуры на...
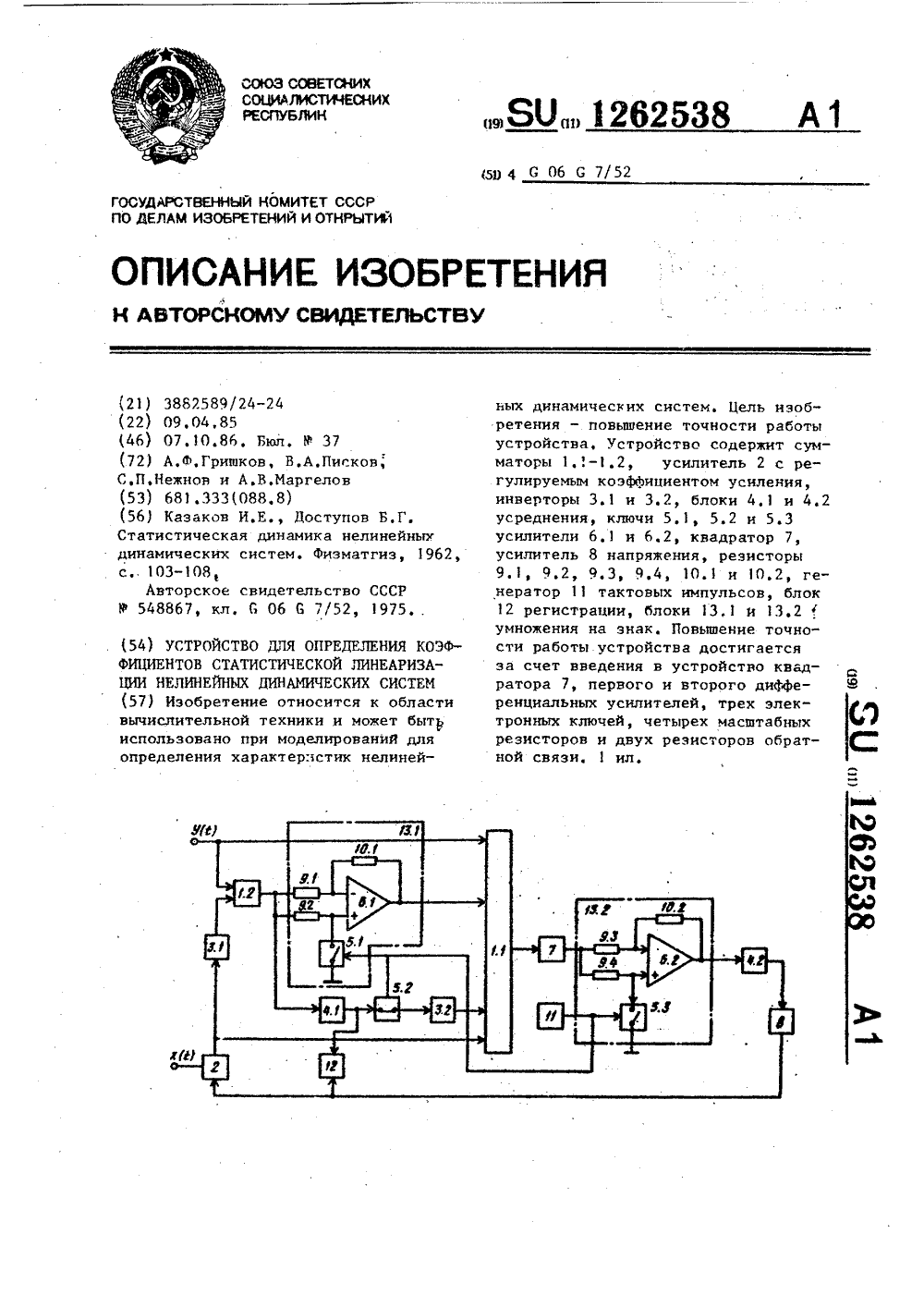
Устройство для определения коэффициентов статистической линеаризации нелинейных динамических систем
Номер патента: 1262538
Опубликовано: 07.10.1986
Авторы: Гришков, Маргелов, Нежнов, Писков
МПК: G06G 7/52
Метки: динамических, коэффициентов, линеаризации, нелинейных, систем, статистической
...6.1 синфазен Оу.,а сигнал на выходе, усилителя 6,2синфазен сигналу на выходе квадратора 7. Следовательно, на выходе сумматора 1 имеем сигналО 4=К у+К 4 у-К 4 Кх++М,ух(Г)-М,М(у(Г),где К 1,К,Ки К 4 - коэффициенты пе редачи сумматора11 .по каждому входучВыбирая К=0,5, Км=0,5; К =1; К 4==0,5; получим:ц,=у( г) -м )у(г) =у (т), (у)а на выходе квадратора 7 и, следовательно, на входе блока усреднения4.2 сигнал:ц:(ц ):у(г (7)В следующий момент времени, когда ключи 5.1, 5.2 и 5.3 находятся вположении, противоположном изображен ному на чертеже, усилители 6.1 и 6,2работают как инверторы и сигналы наих выходах противофазны входным, т,е,на выходе сумматора 1,1 имеем сигналО,:К,у(С) -К 4 у(е)+К 4 Кх К, Кх(е): уакД(е)4 2 -(Я) а на входе блока...
Цифровой измеритель интервалов времени

Номер патента: 1709265
Опубликовано: 30.01.1992
Автор: Кордюмов
МПК: G04F 10/00
Метки: времени, измеритель, интервалов, цифровой
...15, обес 35 печивают коммутацию избранных для измерения сигналов.Сигналом "Сброс" цифровой измеритель интервалов времени приводится в исходное состояние: счетчик 12 импульсов 40 сбрасывается в состояние 000, О-триггер 9 устанавливается в состояние "0", закрывая по второму входу элемент И 4, О-триггер 8 приводится в состояние "1", не закрывая элемент И 4 по третьему входу, сигнал "Готовность" на выходе логического преобразователя отсутствует. В момент прихода на информационный, вход мультиплексора 15 признака начала интервала времени поло жительный фронт по С-входу записывает"1" в О-триггер 9, которая открывает по второму входу (третий вход не закрыт) элемент И 4, и импульсы заполнения с первого входа элемента И 4 начинают поступать в...
Устройство для измерения интенсивности колебаний

Номер патента: 1133484
Опубликовано: 07.01.1985
МПК: G01H 1/00
Метки: интенсивности, колебаний
...фильтр и анализатор дисперсии сигнала, снабжено последова-тельно соединенными, включеннымимежду фильтром и анализатором дисперсии сигнала блоком оценки те 1 сущего значения дисперсии сигнала, делителем и умножителем, вторым блокомоценки текущего значения дисперсиисигнала, делителем и умножителем,вторым блоком оценки текущего значения дисперсии сигнала, входом соеди ненным с выходом фильтра, а выходом -с вторым входом делителя,На чертеже представлена блок-схе 4 фма предлагаемого устройства.. Устройство для измерения интенсивности колебаний содержит последовательно соединенные вибродатчик 1и фильтр 2 и анализатор 3 дисперсиисигнала, последовательно соединенные, включенные между фильтром 2 ианализатором 3 дисперсии сигналаблок 4 оценки...
Цифровой демодулятор сигналов фазоразностной модуляции первого и второго порядка

Номер патента: 1838884
Опубликовано: 30.08.1993
Авторы: Горляковский, Крутов, Тримайлов
МПК: H04L 27/22
Метки: второго, демодулятор, модуляции, первого, порядка, сигналов, фазоразностной, цифровой
...6 и фазоцифровой дискриминатор 7,Текущие значения фазы сигнала с выхода фазоцифрового преобразователя 3 поступают на одни входы первого и второго компенсирующего сумматора 8 и 12, На другие входы компенсирующего сумматора 8 и входы умножителя 11 на два поступает корректирующий код, вырабатываемый в кольце фазовой автоподстройки, С выхода умножителя 11 на два удвоенная величина корректирующего кода поступает на сооответствующие входы второго компенсирующего сумматора 12.Такое подключение сумматоров 8 и 12 к выходам усреднителя 6 приводит к тому, что значение корректирующего кода, суммирующееся с текущим значением фазы сигнала во втором компенсирующем сумматоре 12, будет в два раза больше, чем значение корректирующего кода,...
Предыдущий патент: Релейно-импульсный регулятор для объекта второго порядка
Следующий патент: Многоканальная цифровая система управления виброиспытательной установкой
Случайный патент: Способ обогащения полезных ископаемых